Изобретение относится к радионавигации.
Аналогом изобретения (он же принят в качестве прототипа) является разностно-дальномерный способ определения местоположения фазовым методом (И.Е. Кинкулькин, В.Д. Рубцов, М.А. Фабрик "Фазовый метод определения координат". М., Сов. радио, 1979, стр. 9).
В основе способа лежит определение местоположения объектов по двум (и более) линиям положения путем измерения навигационных параметров вида ("Методика обработки навигационных измерений с оценкой точности", Д., издание ГУН и О МО, 1965).
UНП=SВМ-SВЩ+b, (1)
SBM - геодезическое расстояние от ведомой (ВМ) опорной станции (ОС) радионавигационной системы (РНС) до местоположения объекта;
SBЩ - геодезическое расстояние от ведущей (ВЩ) ОС РНС до местоположения объекта;
b - базовое расстояние между ВЩ и ВМ ОС РНС.
Считается, что величина "b" является заранее известной и незименной во времени величиной для конкретной пары (ВЩ-ВМ) станций и, как следствие, средняя квадратическая погрешность (СКП) навигационного параметра σнп при оценке точности прототипа для всей рабочей зоны РНС принимается постоянной величиной. В этом случае СКП навигационного параметра разностно-дальномерной РНС, выраженная через погрешности опорных станций σос (для простоты будем считать, что все ОС РНС отягащают навигационной параметр одинаковыми по величине погрешностями), имеет вид
σнп = 2σос, (2)
где σос - СКП по направлению, вносимая в навигационный параметр одной ОС.
Прототип, во-первых, не учитывает конструктивных особенностей применяемых для местоопределения РНС, а именно, использование подавляющим большинством импульсно-фазовых и фазовых разностно-дальномерных РНС (например, РНС МАРС-75, Брас, PC-10 и т. д. ) внутрисистемной синхронизации сигналов ОС (излучение сигналов ВМ ОС осуществляется после их синхронизации по сигналам ВЩ ОС и жестко связано с моментом синхронизации).
Во-вторых, в прототипе режимы работы опорных станций (ВЩ или ВМ) для конкретного взаимного расположения станций на местности являются фиксированными для каждой ОС.
Сущность изобретения.
Изобретение направлено на повышение точности местоопределения объектов фазовым методом за счет использования переизлучения сигналов ведущей (задающей) ОС ведомыми станциями разностно-дальномерных РНС и поочередной работы каждой опорной станции цепи РНС в режиме заданной (ведущей) станции.
Внутрисистемная синхронизация ОС цепочки разостно-дальномерной РНС по сигналам общей задающей (ВЩ) ОС по своей физической сущности эквивалентна переизлучению с некоторой временной задержкой сигналов ВЩ ОС ведомыми (ВМ) ОС, что приводит к возникновению корреляционных связей между всеми слагаемыми правой части уравнения (1) и меняет характер распределения погрешностей навигационного параметра в рабочих зонах таких систем.
Среднеквадратическая погрешность σнп в этом случае принимает вид
или (при условии σвщ = σвм = σос)
где k = σвм/σвщ,
σвм - СКП по направлению, вносимая в σнп BM ОС;
σвщ - СКП по направлению, вносимая в σнп ВЩ ОС;
α, β - "пристанционные" углы (см. фиг.1).
Положение линий равных точностей навигационного параметра относительно пары ОС ВЩ-ВМ показано на фиг.2. Штриховкой отмечена часть рабочей зоны, в которой точность навигационного параметра выше точности навигационного параметра прототипа.
Поменяв местами ВЩ и ВМ ОС, получим зеркальное относительно перпендикуляра к середине базового расстояния изображение фиг.2. Следовательно, поочередное изменение режимов работы ОС и с ВМ на ВЩ и обратно (это эквивалентно совмещению прямого и зеркального изображения фиг. 2) позволяет получить повышение точности измерения навигационного параметра для одной линии положения во всей рабочей зоне. Исключение составляет сама линия перпендикуляра к середине базового расстояния, на которой σнп равна соответствующему параметру прототипа.
Точность навигационного параметра каждой линии положения в точке приема сигналов ОС повышается в  раз.
раз.
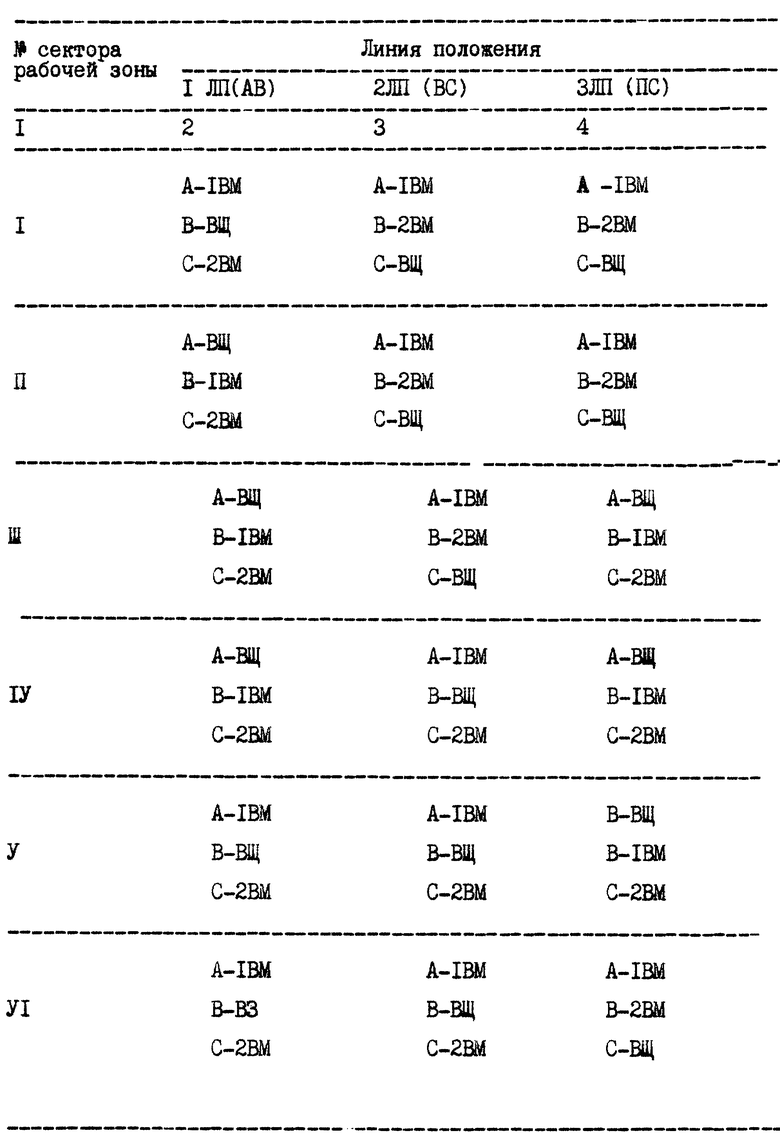
Как известно, для местоопределения объекта требуется не менее двух линий положения, что на практике реализуется с помощью разностно-дальномерной РНС, состоящей из трех ОС. На фиг.3 показано типовое размещение ОС трехстанционной разностно-дальномерной РНС. Перпендикуляры, восстановленные к серединам базовых расстояний и пересекающиеся в одной точке, делят рабочую зону РНС на шесть секторов. В зависимости от номера сектора (фиг.3) можно выбрать такие режимы работы 00, при которых обеспечивается максимальная точность навигационного параметра для каждой из трех линий положения /ЛП/ в назначенном секторе.
Оптимальные сочетания режимов работы в зависимости от номера сектора приведены в таблице.
Поочередно назначая каждую ОС задающей (ВЩ) станцией радионавигационной цепи, можно получить необходимые сочетания режимов работы для всех шести секторов рабочей зоны.
Как следует из фиг.3, точность определения местоположения объектов данным способом будет выше точности определения местоположения прототипа во всей рабочей зоне РНС за исключением точки пересечения перпендикуляров к серединам базовых расстояний, где эти точности равны.
Переназначение режимов, кроме вышеизложенного, дает возможность получения избыточной линии положения (ЗЛП в таблице), что дополнительно повышает точность определения местоположения объектов. На фиг.1 изображены элементы навигационного параметра для одной линии положения разностно-дальномерной РНС, на фиг. 2 - линии равных точностей навигационного параметра для одной линии положения разностно-дальномерной РНС с переизлучением сигналов, на фиг. 3 - деление рабочей зоны разностно-дальномерной РНС с типовым размещением ОС на сектора.
Изобретение реализуется при помощи типовых разностно-дальномерных РНС (например, Лоран-С, МАРС-75, Брас-М, PC-10), путем поочередного переключения режимов работы наземных ОС цепи РНС при сохранении общего цикла излучения сигналов.
При этом каждая ОС последовательно проходит режимы IВМ-ВЩ-2ВМ, в результате чего образуется своеобразное "перемещение" каждого из режимов по станциям цепи в виде "бегущей волны".
Изменение режима работы станций осуществляется по заранее согласованному графику.
Реализация способа осуществляется в следующей последовательности. Назначаются три интервала времени /составляется временной график/. Продолжительность интервалов зависит от конкретного типа используемой РНС и приемоиндикаторного устройства и в общем случае может составлять несколько десятков минут.
В первом интервале времени ОС РНС работают в следующих режимах (литерные обозначения в соответствии с фиг.3):
А - режим IBM,
В - режим ВЩ,
С - режим 2ВМ.
Во втором интервале времени ОС РНС работают в режимах:
А - режим ВЩ,
В - режим IBM,
С - режим 2ВМ.
В третьем интервале времени ОС РНС работают в режимах:
А - режим IBM,
В - режим 2ВМ,
С - режим ВЩ.
После этого цикл временных интервалов повторяется.
Измерение приемоиндикаторным устройством навигационных параметров для обеспечения максимальной точности определения местоположения объекта в точке приема сигналов ОС РНС осуществляется исходя из временного графика и номера сектора рабочей зоны, в котором находится объект, в соответствии с приведенной выше таблицей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ УПРУГИХ МУФТ | 2001 |
|
RU2206880C2 |
| СПОСОБ ПОИСКА ОБЪЕКТА, УКЛОНЯЮЩЕГОСЯ ОТ ОБНАРУЖЕНИЯ | 2003 |
|
RU2262719C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ ПОДВОДНОГО СУДНА | 2001 |
|
RU2213677C2 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР С ДЕМПФИРУЮЩИМ ЭЛЕМЕНТОМ | 1999 |
|
RU2173803C2 |
| ДВУХРЕЖИМНЫЙ ВОДОЗАБОРНИК ВОДОМЕТНОГО ДВИЖИТЕЛЯ ВЫСОКОСКОРОСТНОГО СУДНА | 2000 |
|
RU2184678C2 |
| ГИДРОАКУСТИЧЕСКИЙ МАЯК ДЛЯ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2235345C1 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНЫЙ КОМПЛЕКС | 2001 |
|
RU2204502C2 |
| ГИДРОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ МОДЕЛЬНЫХ ИСПЫТАНИЙ ПОДВОДНЫХ СНАРЯДОВ | 1995 |
|
RU2203469C2 |
| СОСТАВ ДЛЯ ПОВЫШЕНИЯ ИЗНОСОСТОЙКОСТИ УЗЛОВ ТРЕНИЯ ПРИ ЭКСПЛУАТАЦИИ | 2000 |
|
RU2176267C2 |
| РЕПУЛЬСИОННЫЙ ВЕНТИЛЬНЫЙ РЕВЕРСИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2187190C2 |


Использование: радионавигация. Сущность изобретения: способ направлен на повышение точности определения местоположения объектов фазовым методом путем использования переизлучения сигналов общей задающей (ведущей) станции ведомыми станциями радионавигационной системы и поочередного использования каждой опорной станции радионавигационной цели в режиме ведущей. 3 ил., 1 табл.
Способ определения местоположения объектов фазовым методом при использовании разностно-дальномерной радионавигационной системы, заключающийся в определении местоположения объекта не менее чем по двум линиям положения путем измерения радионавигационных параметров по сигналам опорных наземных станций разностно-дальномерной радионавигационной системы с общей ведущей станцией и переизлучения сигналов ведущей станции ведомыми станциями, отличающийся тем, что производят последовательное изменение режимов работы опорных наземных станций радионавигационной цепи с поочередной работой каждой из станций в режиме ведущей в течение назначенных интервалов времени, объединенных в цикл, и определяют местоположение объекта, исходя из оптимального по точности сочетания измеренных в цикле радионавигационных параметров.
| Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А | |||
| Фазовый метод определения координат | |||
| - М.: Сов.радио, 1979, с.9. |
