Изобретение относится к усилительным устройствам с широтно-импульсной модуляцией и может использоваться при автоматизации технологических процессов.
Известен развертывающий преобразователь (РП), содержащий интегратор, релейный элемент, трансформатор, фильтр, резисторы (а.с. N 758178, 1980, б. и. N 30).
Недостатком этого РП является зависимость частоты его выходных импульсов от величины входного сигнала.
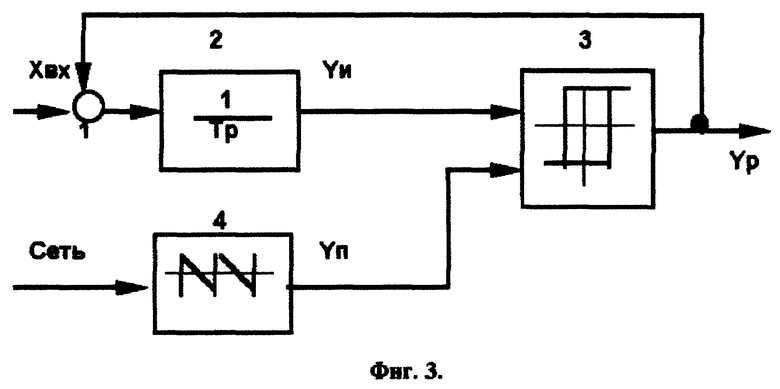
Известен РП - прототип (Цытович Л.И., Маурер В.Г., Цытович П.Л. Широтно-импульсный интегрирующий развертывающий преобразователь с контуром амплитудной коррекции динамических характеристик, Приборы и техника эксперимента, 1997, N 3, с.89-93), содержащий (фиг.3) автоколебательный каскад на основе сумматора 1, интегратора 2, релейного блока 3, работающий в режиме внешней синхронизации от пилообразного напряжения 4.
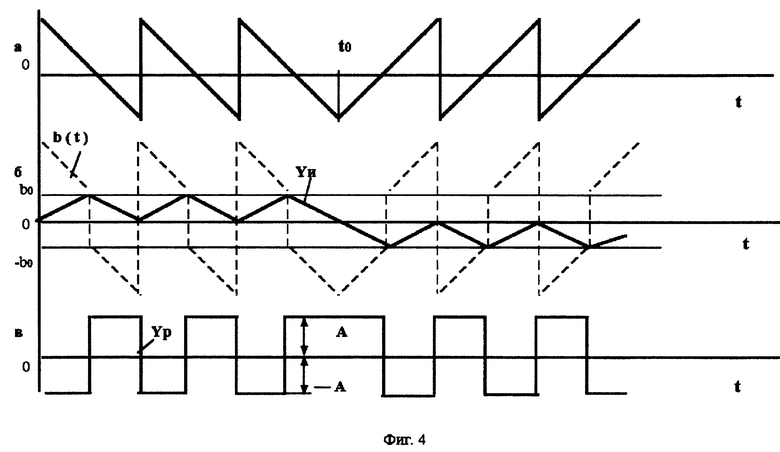
Недостатком РП-прототипа является длительный переходный процесс при изменении фазы синхронизирующего пилообразного напряжения. Сказанное иллюстрируется диаграммами сигналов на фиг. 4-6.
При нулевом сигнале (фиг. 4) РП входит в синхронизм с сигналом "пилы" Yп (фиг.4), под действием которого осуществляется амплитудная модуляция порогов ± b0 переключения блока 3. Выходной сигнал интегратора Yи имеет пилообразную форму с постоянной составляющей (фиг. 4б), зависящей от соотношения частот сигнала Yп и собственных автоколебаний РП. На выходе блока 3 формируются импульсы Yр с нулевым уровнем постоянной составляющей (фиг. 4в). При синхронизации РП сигналом "пилы", имеющим спадающий характер линейного участка (фиг. 4а, 0 < t ≤ t0), задний фронт сигнала Yр (перепад + A - A) фиксирован во времени, а положение переднего фронта зависит от величины информационного сигнала. Предположим, что в момент времени t0 (фиг. 4а) произошло инвертирование сигнала "пилы".
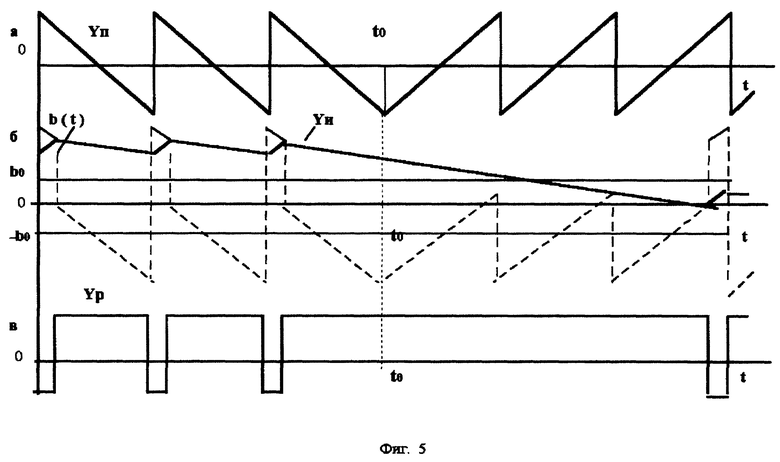
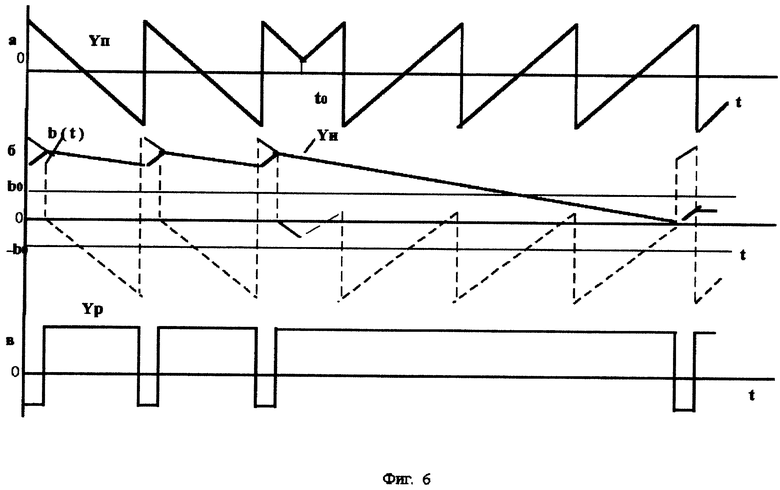
В этом случае происходит переориентация РП, когда меняется знак постоянной составляющей сигнала Yп (фиг. 4б), на выходе блока 3 (фиг. 4в) формируются импульсы, у которых фиксирован передний фронт, а модуляция происходит по заднему фронту. Подобный режим смены направления развертки Yп (фиг. 4а) позволяет, например, существенно упростить систему управления реверсивным тиристорным преобразователем, в частности, при переходе с выпрямительной на инверторную группу мостов. Однако данный принцип управления РП имеет существенный недостаток. Предположим, что смена знака сигнала Yп происходит при ненулевом значении сигнала управления (фиг. 5). Учитывая различный темп изменения напряжения Yи в примыкающих циклах преобразования (фиг. 5б) в РП в течение нескольких периодов синхронизирующего сигнала Yп (периодов напряжения сети) наступает срыв режима переключений релейного блока 3 (фиг. 5б, в, t < t0), т.к. функции b(t) и Yи(t) не имеют совместного решения. Причем следует отметить, что данный переходный процесс практически не зависит от момента времени t0 смены направления развертки Yи, что поясняется диаграммами сигналов на фиг. 6, где момент t0 (фиг. 6а) выбран произвольно.
Таким образом, РП-прототип характеризуется низкой точностью работы при смене знака синхронизирующего сигнала.
В основу изобретения положена техническая задача уменьшения времени переходного процесса при смене знака синхронизирующего сигнала при работе развертывающего преобразователя (РП).
Предлагаемый развертывающий преобразователь содержит последовательно включенные источник сигнала управления, сумматор, интегратор с установочным входом и релейный элемент, выход которого подключен к выходной клемме и ко второму входу сумматора, генератор пилообразного напряжения, синхронизированный с напряжением сети, выход которого подключен к входу инвертора и к нормально замкнутому контакту ключевого элемента, нормально разомкнутый контакт которого подключен к выходу инвертора, RS-триггер, S-вход которого соединен с командным входом и с входами элемента НЕ, выход которого подключен к R-входу RS-триггера, выход RS-триггера подключен к управляющему входу ключевого элемента, выход которого соединен со вторым входом релейного элемента, и отличается от известного развертывающего преобразователя тем, что в него введен одновибратор, вход которого подключен к командному входу, а выход - к входу установки "нуля" интегратора.
Существенным отличием предлагаемого РП является малое время переходного процесса. Поставленная техническая задача достигается путем установки нулевых начальных условий в интеграторе в момент времени смены фазы синхронизирующего сигнала.
Изобретение поясняется чертежами, где на фиг. 1 представлена функциональная схема РП, а на фиг. 2 - временные диаграммы его сигналов.
В состав РП (фиг. 1) входят сумматор 1, интегратор 2, релейный блок 3, генератор пилообразного сигнала 4, инвертор 5, ключ 6, одновибратор 7, элемент НЕ 8, RS-триггер 9, информационный вход 10, синхронизирующий вход 11, командный вход 12, выход 13.
Сумматор 1 имеет единичный коэффициент передачи по каждому из входов и подключен к входу инвертора 2 с передаточной функцией
W(p) = 1/Tp
Релейный элемент 3 выполнен с неинвертирующей петлей гистерезиса и с симметричными относительно "нуля" порогами переключения. Генератор 4 синхронизирован с сетью и формирует на выходе сигнал "пилы" с линейно спадающим и дискретным фронтами. Блок 5 инвертирует знак выходного сигнала генератора 4. Ключ 6 при "0" на выходе блока 9 находится в состоянии, показанном на фиг. 1. При "1" на управляющем входе ключ 6 переключается и нормально разомкнутый контакт замыкается. Блок 7 формирует импульс малой и стабильной длительности синхронно с фронтами сигнала на входе 12. При этом интегратор 2 устанавливается в "0". Блок 9 переходит в "1" при S = 1 и R = 0. В случае S=0, R=1 выходной сигнал триггера 9 равен "1".
На фиг. 2 обозначены:
Yп - выходной сигнал генератора 4;
± b0 - пороги переключения релейного элемента 3 при отсутствии генератора 4;
b(t) - закон изменения порогов блока 3 при их модуляции сигналом Yп;
Yи - выходной сигнал интегратора 2;
Yр - выходной сигнал релейного блока 3;
Y0 - выходной сигнал одновибратора 7;
t0 - момент времени инвертирования знака сигнала Yп;
Xвх - сигнал управления.
Принцип работы РП следующий. Генератор 4 синхронизирован с сетью, что обеспечивает формирование на выходе РП импульсов аналогичной частоты и повышает помехоустойчивость устройства к помехам со стороны источника питания. В исходном состоянии пилообразный сигнал с выхода генератора 4 имеет линейно спадающий и дискретный фронты (фиг. 2а, t < t0). Триггер 9 находится в состоянии "0", т. к. на вход 12 подан "0". Выход генератора 4 через нормально замкнутый контакт ключа 6 подключен ко второму входу релейного элемента 3, что приводит к модуляции его пороговых уровней по закону синхронизирующего сигнала (фиг. 2а). При отсутствии сигнала управления на клемме 10 на выходе 13 РП формируются импульсы "меандр" со средним нулевым значением. Под действием сигнала управления (фиг. 2в) сигнал развертки на выходе интегратора 2 смещается "вертикально" относительно нулевого уровня, что приводит к изменению скважности выходных импульсов РП (фиг. 2б, в). Задний фронт выходного сигнала РП фиксирован во времени, а положение переднего фронта зависит от величины сигнала управления.
Предположим, что в момент t0 на вход 12 подана "1", тогда S=1, R=0 и триггер 9 устанавливается в "1". На второй вход релейного блока 3 подается с выхода инвертора 5 инвертированный по знаку сигнал "пилы" (фиг. 2а). Одновременно запускается одновибратор 7 (фиг. 2г) и "обнуляется" интегратор 2 (фиг. 2б). Тем самым сохраняется время переходного процесса в РП (фиг. 5), который переходит в режим работы, когда фиксируется во время передний фронт, а в режиме ШИМ находится задний фронт выходных импульсов РП. Включение блока 7 исключает статическое состояние РП на стадии переходного процесса, что повышает точность работы устройства по сравнению с РП-прототипом.
Предлагаемое изобретение используется в системе импульсно-фазового управления реверсным тиристорным преобразователем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2496228C1 |
| МНОГОЗОННЫЙ АНАЛОГО-ДИСКРЕТНЫЙ ДАТЧИК ТОКА | 2011 |
|
RU2459249C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2373624C1 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2012 |
|
RU2513024C2 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2013 |
|
RU2531530C1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2009 |
|
RU2422974C1 |
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2461875C1 |
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2009 |
|
RU2408969C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2552147C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |

Изобретение относится к области автоматики и может использоваться при управлении технологическими процессами. Техническим результатом является повышение точности работы. Устройство содержит источник сигнала управления, сумматор, интегратор с установочным входом, релейный элемент, инвертор, генератор пилообразного напряжения, ключевой элемент, RS-триггер, элемент НЕ и одновибратор. 6 ил.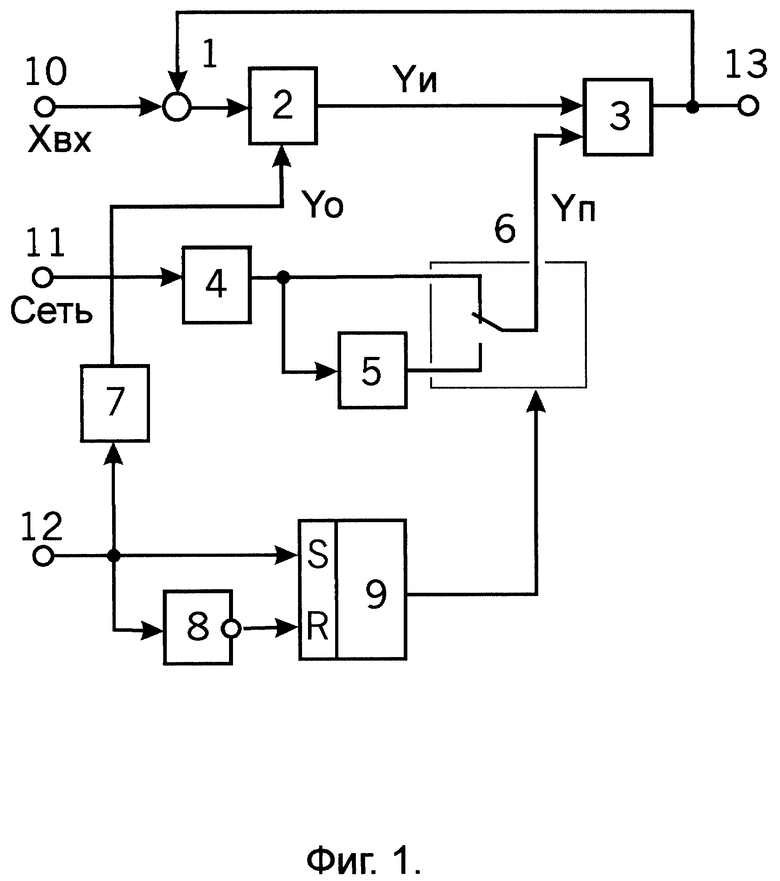
Развертывающий преобразователь, содержащий последовательно включенные источник сигнала управления, сумматор, интегратор с установочным входом и релейный элемент, выход которого подключен к выходной клемме и ко второму входу сумматора, генератор пилообразного напряжения, синхронизированный с напряжением сети, выход которого подключен к входу инвертора, отличающийся тем, что в него введены RS-триггер, элемент НЕ, одновибратор, инвертор и ключевой элемент, к нормально замкнутому контакту которого подключен выход генератора пилообразного напряжения, а нормально разомкнутый контакт ключевого элемента подключен к выходу инвертора, S-вход RS-триггера соединен с командным входом преобразователя и с входом элемента НЕ, выход которого подключен к R-входу триггера, выход RS-триггера подключен к управляющему входу ключевого элемента, выход которого соединен со вторым входом релейного элемента, вход одновибратора подключен к командному входу, а выход соединен с входом установки нуля интегратора.
| Цытович Л.И | |||
| и др | |||
| Широтно-импульсный интегрирующий развертывающий преобразователь с контуром амплитудной коррекции динамических характеристик | |||
| - М.: Приборы и техника эксперимента | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU 758178 C1, 25.08.1980 | |||
| СПОСОБ ДИНАМИЧЕСКОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 1995 |
|
RU2116694C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО ШИРОТНО-ИМПУЛЬСНОГО ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2020737C1 |
| US 4937577 A, 26.06.1989 | |||
| WO 9826501 A1, 18.06.1998 | |||
| US 4860012 A, 22.08.1987. | |||
