Изобретение относится к системам с импульсной модуляцией информации или энергии и может быть применено в быстродействующих системах автоматического управления или, например, в устройствах импульсной радиосвязи.
Данное техническое решение направлено на расширение частотной полосы пропускания импульсных устройств при сохранении их энергетических показателей и помехозащищенности.
В указанных областях большое применение получает способ односторонней широтно-импульсной модуляции второго рода (ШИМ-2), согласно которому длительность импульсов модулируется за счет временного сдвига одного из фронтов - переднего или заднего, причем второй фронт каждого импульса формируется в тактовый момент времени [1]. Известно, что одним из основных критериев качества ШИМ является возможность получения информации об изменениях входного управляющего сигнала по виду выходных импульсов. Очевидно, качество ШИМ тем выше, чем шире диапазон пропускаемых частот, а также меньше динамические ошибки воспроизведения изменяющихся сигналов управления. При малых глубинах модуляции максимальная (граничная) частота управляющего сигнала на входе звена ШИМ-2 согласно известной теореме В.А. Котельникова не превышает половины тактовой частоты модуляции. Однако увеличение тактовой частоты с целью расширения частотной полосы пропускания имеет свои пределы, обусловленные пропорциональным увеличением коммутационных потерь энергии в ключевых элементах или, например, ограниченным быстродействием цифровых элементов или снижением их помехозащищенности.
Известны также способы управления, направленные на преодоление указанного противоречия между динамическими и энергетическими показателями путем увеличения тактовой частоты лишь при отработке быстроизменяющихся сигналов управления большой амплитуды [2]. Однако реализация подобной идеи достаточно сложна и придает устройствам существенно нелинейные свойства, что затрудняет применение в замкнутых системах автоматического управления. В качестве прототипа принимается способ односторонней ШИМ-2, который имеет с изобретением сходные существенные признаки: модуляция ширины импульсов осуществляется за счет изменения временного положения одного из фронтов - переднего или заднего, определяемого в точках равенства кривой управляющего сигнала и периодически изменяющегося с тактовой частотой развертывающего сигнала линейно возрастающей или убывающей формы [2].
Недостатком прототипа является невозможность расширения диапазона воспроизводимых частот без увеличения тактовой частоты модуляции, приводящего, как отмечалось, к уменьшению энергетических показателей и в ряде случаев к снижению помехозащищенности. Указанный недостаток обусловлен наличием критической скорости изменения управляющего сигнала, а также несимметричной реакцией звена ШИМ-2 на изменения сигнала управления в сторону увеличения и уменьшения.
Целью изобретения является расширение диапазона воспроизводимых частот управляющего сигнала при сохранении энергетических показателей и помехозащищенности путем обеспечения предельного быстродействия и симметричной реакции звена ШИМ-2 на изменения управляющего сигнала в сторону увеличения и уменьшения. Для этого предлагается вырабатывать две последовательности импульсов, у одной из которых модуляция ширины импульсов осуществляется за счет изменения положения передних фронтов, а у другой - за счет изменения положения задних фронтов, но пропускать на выход модулятора одну или другую последовательность в зависимости от знака производной управляющего сигнала, запрещая при этом подачу второй последовательности.
Реализация предлагаемого алгоритма возможна в четырех вариантах, один из которых отличается тем, что у первой последовательности задние фронты импульсов формируют в моменты равенства управляющего сигнала и развертывающего сигнала возрастающей формы, а передние фронты формируют в тактовые моменты времени, а у второй последовательности передние фронты импульсов формируют в моменты равенства сигнала, получаемого путем изменения фазы управляющего сигнала на 180oC и развертывающего сигнала возрастающей формы, а задние фронты формируют в тактовые моменты так, что при изменении знака производной управляющего сигнала с положительного на отрицательный запрещают подачу на выход импульсов второй последовательности и одновременно разрешают подачу импульсов первой последовательности, а при изменении знака производной управляющего сигнала с отрицательного на положительный запрещают подачу на выход импульсов первой последовательности и одновременно разрешают подачу импульсов второй последовательности.
Второй вариант отличается тем, что у первой импульсной последовательности передние фронты импульсов формируют в моменты равенства управляющего сигнала и развертывающего сигнала убывающей формы, а задние фронты формируют в тактовые моменты времени, а у второй последовательности задние фронты импульсов формируют в моменты равенства сигнала, получаемого путем изменения фазы управляющего сигнала на 180o и развертывающего сигнала убывающей формы, а передние фронты формируют в тактовые моменты, так что при изменении знака производной управляющего сигнала с положительного на отрицательный запрещают подачу на выход модулятора импульсов первой последовательности и одновременно разрешают подачу импульсов второй последовательности, а при изменении знака производной управляющего сигнала с отрицательного на положительный запрещают подачу на выход импульсов второй последовательности и одновременно разрешают подачу импульсов первой последовательности.
Третий вариант отличается тем, что при изменении знака производной управляющего сигнала мгновенно изменяют фазу развертывающего сигнала на 180oC при сохранении фазы управляющего сигнала неизменной таким образом, чтобы при положительном знаке производной управляющего сигнала развертывающий сигнал имел убывающую форму и модуляцию ширины импульсов, пропускаемых на выход модулятора, осуществляют за счет изменения положения передних фронтов импульсов, а при отрицательном знаке производной управляющего сигнала развертывающий сигнал имел возрастающую форму, а модуляцию ширины импульсов, пропускаемых на выход модулятора, осуществляют за счет изменения положения задних фронтов импульсов.
Четвертый вариант отличается тем, что у первой последовательности широтно-модулированных импульсов передние фронты формируют в тактовые моменты времени, а задние фронты формируют в моменты равенства управляющего сигнала и развертывающего сигнала возрастающей формы, а у второй последовательности импульсов передние фронты формируют в моменты равенства управляющего сигнала и развертывающего сигнала убывающей формы, а задние фронты формируют в тактовые моменты времени, причем при изменении знака производной управляющего сигнала с положительного на отрицательный запрещают подачу на выход модулятора импульсов второй последовательности и одновременно разрешают подачу импульсов первой последовательности, а при изменении знака производной управляющего сигнала с отрицательного на положительный запрещают подачу на выход модулятора импульсов первой последовательности и одновременно разрешают подачу импульсов второй последовательности.
На фиг. 1 а, б представлены временные диаграммы, иллюстрирующие недостаток известного способа широтно-импульсной модуляции на примере линейно изменяющихся сигналов управления; на фиг. 2 - временные диаграммы, позволяющие выявить новую закономерность на примере сигналов управления гармонического вида; на фиг. 3а - пояснение предложенного способа согласно п. 2 формулы изобретения; на фиг. 3б - то же, согласно п. 3 формулы изобретения; на фиг. 4 - то же, согласно п. 4 формулы изобретения; на фиг. 5 - то же, согласно п. 5 формулы изобретения; на фиг. 6 - временные диаграммы, позволяющие провести сравнительную оценку частотных возможностей известного и предложенного способов модуляции; на фиг. 7 - графики частотной полосы пропускания звена с широтно-импульсной модуляцией по известному и предложенному способам; на фиг. 8-11 приведены в качестве примера принципиальные схемы устройств, позволяющих реализовать предложенный способ.
Анализ причин недостатка известного способа позволяет сделать вывод о несимметричности реакции звена ШИМ-2 на возрастающие и убывающие сигналы управления. Разобраться в этом явлении помогут диаграммы на фиг. 1а, которые иллюстрируют случай подачи на вход звена ШИМ-2 противофазных сигналов управления линейно возрастающей (Xy1) и линейно убывающей (Xy2) формы. Реализация ШИМ-2 в данном случае осуществляется на основе развертывающих сигналов линейно возрастающей формы, в связи с чем модуляция ширины импульсов происходит за счет сдвига задних фронтов. Диаграммы отражают основной режим работы, когда скорость изменения управляющих сигналов остается меньше критической скорости изменения развертывающих сигналов. Импульсная последовательность tu1=F(Xy1) представляет собой реакцию звена ШИМ-2 на возрастающий сигнал управления, а последовательность tu2=F(Xy2) - на убывающий сигнал управления. Сравнивая, можно видеть, что указанная несимметрия проявляется в неодинаковом количестве импульсов на интервалах изменения сигналов Xy1 и Xy2, а также в неодинаковом потактном изменении ширины импульсов. Действительно, из подобия треугольников, образованных прямыми Xy1 и Xy2, следует пропорция вида
откуда получается зависимость, пригодная для определения ширины импульса на каждом i-ом такте в случае возрастания сигнала управления
Аналогично можно получить расчетную зависимость для ширины импульсов в случае уменьшения сигнала управления
где
T - период тактовой частоты;
tϕ - начальная фаза управляющего сигнала (принято tϕ= 0 );
Xопм - амплитуда развертывающего сигнала;
Xум - максимальное значение сигнала управления на интервале изменения (принято Xум=2/3 Xопм)
n - количество периодов тактовой частоты на интервале изменения управляющего сигнала (принято n = 7);
i = 0,1,.. - порядковый номер импульса.
Результаты подсчета tи1 и tи2 отображены на диаграммах фиг. 1а. Видно, что в отличие от управляющих сигналов, импульсные последовательности несимметричны, так как потактно не дополняют друг друга и потому могут быть названы некомплементарными. Потактное суммирование длительностей импульсов, принадлежащих разным последовательностям, позволяет оценить результирующую реакцию звена ШИМ-2 на сумму управляющих воздействий. В отличие от последней суммарная длительность импульсов не сохраняется постоянной и зависит от i, то есть
tи1 + tи2 = F(i)
Это свидетельствует о наличии динамической ошибки воспроизведения суммарного сигнала управления Xy1 + Xy2. Проецируя фронты результирующих импульсов на диаграмму развертывающих сигналов Xоп, можно получить ряд точек, соединенных пунктирной прямой. Очевидно, отклонение этой прямой от горизонтальной линии на уровне Xу1 + Xу2 и представляет собой динамическую ошибку воспроизведения. Неадекватность результирующей реакции сумме входных воздействий свидетельствует о нелинейных свойствах, не позволяющих в необходимых случаях воспользоваться известным принципом суперпозиции.
Другим проявлением динамической несимметрии ШИМ-2 служит неодинаковое число, а значит и неодинаковая частота переключений при отработке возрастающих и уменьшающихся сигналов управления. Продолжая анализ диаграмм на фиг. 1а, можно записать выражение для общего количества переключений (импульсов) на интервале возрастания сигнала Xу1.
 ,
,
а также уменьшения сигнала
где
FA - функция Антье (ближайшего целого).
Формулы подтверждают, что количество и частота переключений при уменьшении управляющего сигнала больше, чем при увеличении управляющего сигнала. В общем случае это увеличение наблюдается при встречном изменении управляющего и развертывающего сигналов. Произведя вычитание полученных зависимостей, можно оценить разницу в количестве переключений
Следовательно, разница наблюдается при условии Xум≥1/2 Xопм и может быть равна единице или двум. Это становится ощутимым по мере увеличения скорости изменения управляющих сигналов, и когда она достигает критической, формирование импульсов при изменении сигналов в одну сторону становится невозможным. Таким образом, наличие критической скорости изменения управляющего воздействия имеет место только при одном направлении его изменения и обуславливает предел быстродействия ШИМ-2.
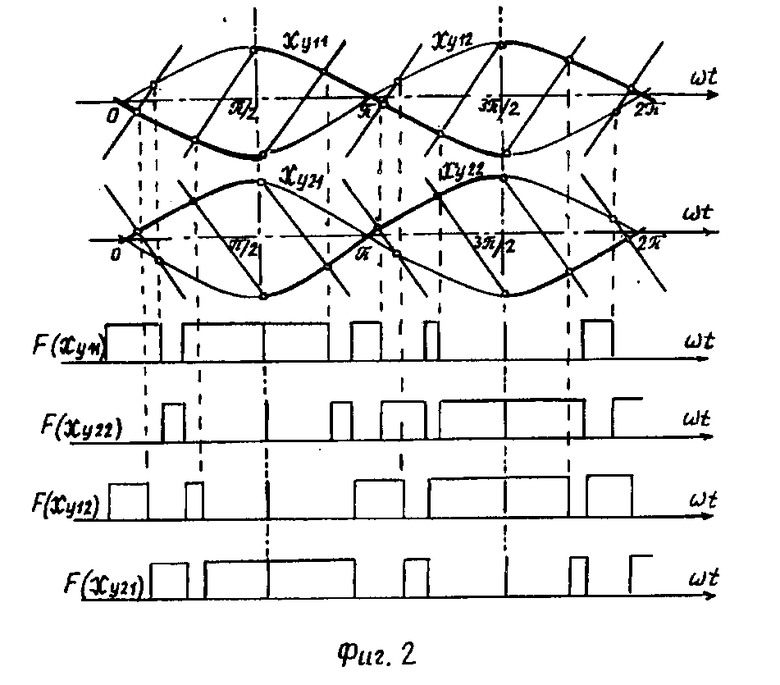
Диаграммы на фиг. 1б отличаются от рассмотренных тем, что развертывающие сигналы имеют линейно убывающую форму и потому модуляция ширины импульсов происходит за счет сдвига передних фронтов. В этой связи динамическая несимметрия данного варианта ШИМ-2 имеет обратный характер. Преимущественным направлением изменения управляющего сигнала без ограничения скорости для варианта на фиг. 1а является уменьшение, а для варианта на фиг. 1б - увеличение управляющего сигнала. Отсюда можно сделать вывод о возможности получения симметричной реакции на основе комбинирования указанных вариантов. Для этого необходимо инвертировать фазу управляющего или развертывающего сигналов в моменты изменения направления управляющего воздействия. В целях общности рассмотрим всевозможные пути реализации данного подхода. Для этого, как и ранее, представим два варианта ШИМ-2, у которых тактовые моменты синхронизированы, а развертывающие сигналы изменяются в противофазе. При этом на вход звена ШИМ-2 с возрастающей формой развертывающих сигналов подадим два управляющих воздействия Xy1 и Xy12, например, синусоидальной формы, находящиеся по отношению друг к другу также в противофазе (см. фиг. 2а). Такие же сигналы Xy21=Xy11 и Xy22=Xy12 подадим на вход звена ШИМ-2 с убывающей формой развертывающих сигналов (см. фиг. 2б). Рассматривая импульсные реакции, можно заметить, что они попарно дополняют друг друга, то есть на каждом такте длительность импульса одной последовательности равна длительности паузы другой последовательности. В этой связи пары импульсных последовательностей F(Xy11) и F(Xy22), а также F(Xy12) и F(Xy21) могут быть названы комплементарными. Очевидным свойством комплементарных последовательностей является возможность перехода от одной к другой посредством операции логического инвертирования импульсов, в связи с чем можно записать
Поставим задачу воспроизведения синусоидального управляющего сигнала Xy11 в виде импульсной последовательности F(Xy) на всем периоде 2π без появления динамической несимметрии. Для этого, как отмечалось, необходимо сохранить возможность формирования импульсов на временных участках, где управляющий и развертывающие сигналы изменяются во встречных направлениях, и устранить эту возможность на участках их изменения в одинаковых направлениях. В общем случае такая задача может быть решена в нескольких вариантах.
Варианты первый и второй предполагают инвертирование фазы управляющего и сохранение фазы развертывающих сигналов. Для этого необходимо, чтобы управляющий сигнал на периоде 2π представлял собой кусочную функцию вида
а результирующая импульсная последовательность была синтезирована по участкам следующим образом
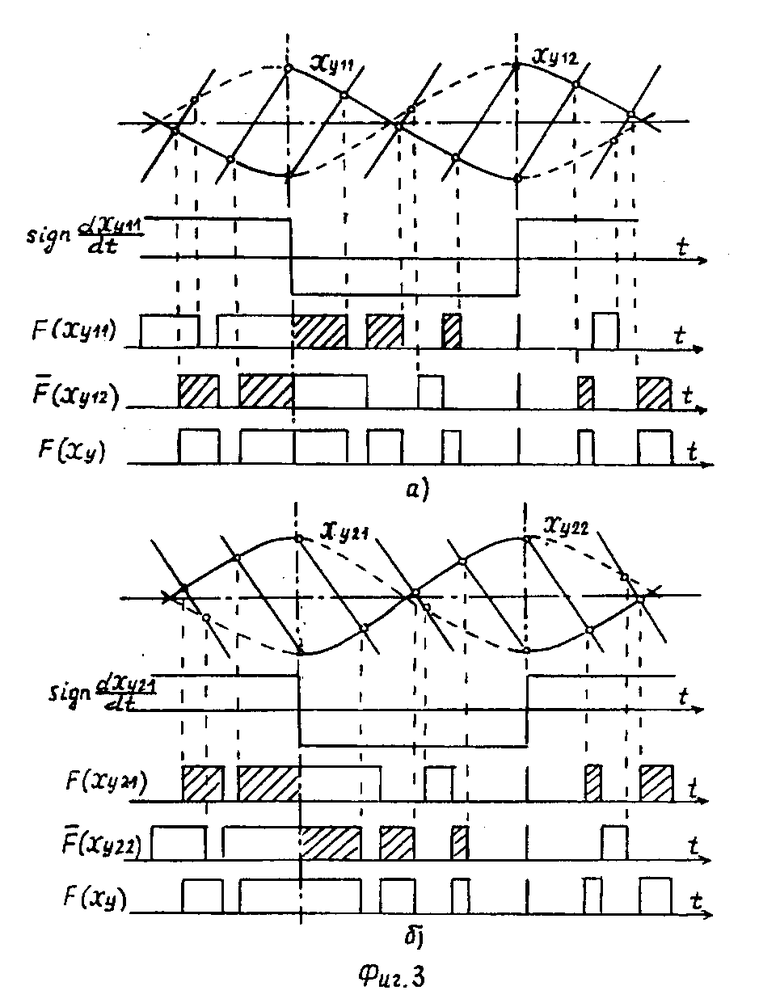
Первый вариант, реализованный на основе развертывающих сигналов возрастающей формы, иллюстрируют диаграммы на фиг. 3а. Штриховкой выделена та часть импульсов в составе последовательностей F(Xy11) и  , которые образуют результирующий импульсный сигнал F(Xy). Видно, что закон модуляции меняется на участках возрастания и уменьшения управляющего сигнала, что обеспечивает симметричность и предельную скорость реакции на его изменения в любом направлении с любой скоростью. Участки возрастания и уменьшения управляющего сигнала при любой его форме легко и однозначно определяются с помощью сигнатурной функции знака производной управляющего сигнала
, которые образуют результирующий импульсный сигнал F(Xy). Видно, что закон модуляции меняется на участках возрастания и уменьшения управляющего сигнала, что обеспечивает симметричность и предельную скорость реакции на его изменения в любом направлении с любой скоростью. Участки возрастания и уменьшения управляющего сигнала при любой его форме легко и однозначно определяются с помощью сигнатурной функции знака производной управляющего сигнала
Диаграммы на фиг. 3б иллюстрируют второй вариант решения поставленной задачи на основе ШИМ-2 с убывающей формой развертывающих сигналов. Аналогично первому варианту в начале формируют две последовательности модулированных по ширине импульсов, однако у первой последовательности в моменты равенства управляющего и развертывающих сигналов формируются не задние, а передние фронты импульсов, соответственно задние фронты формируются в тактовые моменты времени. Для выработки второй импульсной последовательности на управляющий вход модулятора подается сигнал, получаемый путем изменения фазы управляющего сигнала на 180o, причем задние фронты этих импульсов формируют в моменты равенства указанного сигнала с развертывающими сигналами убывающей формы, а передние фронты формируют в тактовые моменты. При изменении знака производной управляющего сигнала с положительного на отрицательный запрещается подача на выход импульсов первой последовательности и одновременно разрешается подача импульсов второй последовательности и, наоборот, при изменении знака производной управляющего сигнала с отрицательного на положительный указанная выше процедура с запретом и разрешением импульсов первой и второй последовательностей осуществляется в обратном порядке.
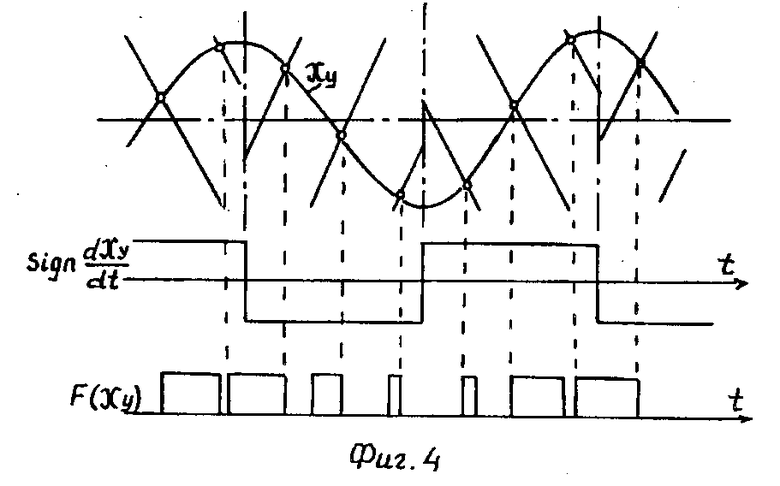
Вариант третий предполагает инвертирование фазы развертывающих и сохранение фазы управляющего сигналов. Диаграммы на фиг. 4 подтверждают, что поставленная цель может быть достигнута, если при изменении знака производной управляющего сигнала мгновенно изменять фазу развертывающего сигнала на 180o таким образом, чтобы при положительном знаке производной развертывающий сигнал имел убывающую форму, а модуляция ширины импульсов осуществлялась за счет изменения положения передних фронтов, а при отрицательном знаке производной развертывающий сигнал имел возрастающую форму, а модуляция осуществлялась за счет изменения положения задних фронтов импульсов.
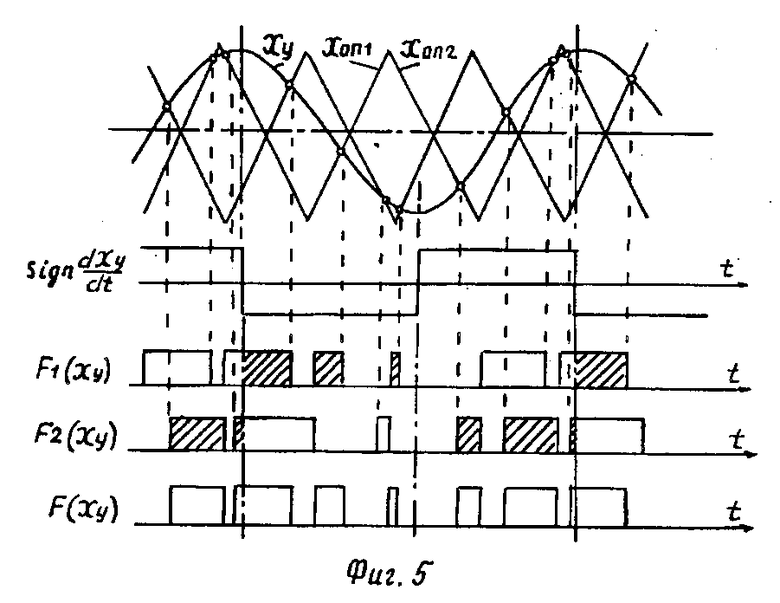
Вариант четвертый предполагает первоначальное формирование двух импульсных последовательностей, положения модулированных фронтов которых на каждом такте определяются в точках равенства управляющего сигнала Xy(t) и двух развертывающих сигналов Xоп1 и Xоп2, причем последние изменяются в противофазе (см. фиг. 5). У первой последовательности F1(Xy) передние фронты формируются в тактовые моменты, а задние - в моменты равенства управляющего сигнала и развертывающего сигнала возрастающей формы X(y(t)=Xоп1. У второй последовательности импульсов F2(Xy) передние фронты формируются в моменты равенства управляющего сигнала и развертывающего сигнала убывающей формы Xy(t)= Xоп2, а задние фронты - в тактовые моменты. Тогда при изменении знака производной управляющего сигнала с положительного на отрицательный запрещается подача на выход импульсов второй последовательности и одновременно разрешается подача импульсов первой последовательности. При изменении знака производной управляющего сигнала в обратную сторону запрещается подача на выход импульсов первой последовательности и разрешается подача импульсов второй последовательности. Последний вариант реализации способа иллюстрируется диаграммами на фиг. 5. На них показано, что выходной импульсный сигнал F(Xy) на участках периода 2π формируется из импульсов двух последовательностей F1(Xy) и F2(Xy), выделенных штриховкой.
Таким образом, предложенный способ во всех рассмотренных вариантах обеспечивает одинаковый результат: достигается симметричность и предельная скорость реакции выходного импульсного сигнала на возрастания и убывания управляющего сигнала, а также устраняется такое явление, как критическая скорость изменения управляющего воздействия, в связи с чем появляется возможность его отработки при изменении этого воздействия в любом направлении с любой скоростью. Важно также отметить, что увеличение скорости и амплитуды изменений управляющего сигнала сопровождается ростом частоты переключений в динамике, что благоприятно влияет, как это можно предположить, на динамическую точность воспроизведения этого сигнала. В связи с тем, что предложенный способ распространяется лишь на переходные процессы управления, он может быть назван способом динамической широтно-импульсной модуляции (ДШИМ-2).
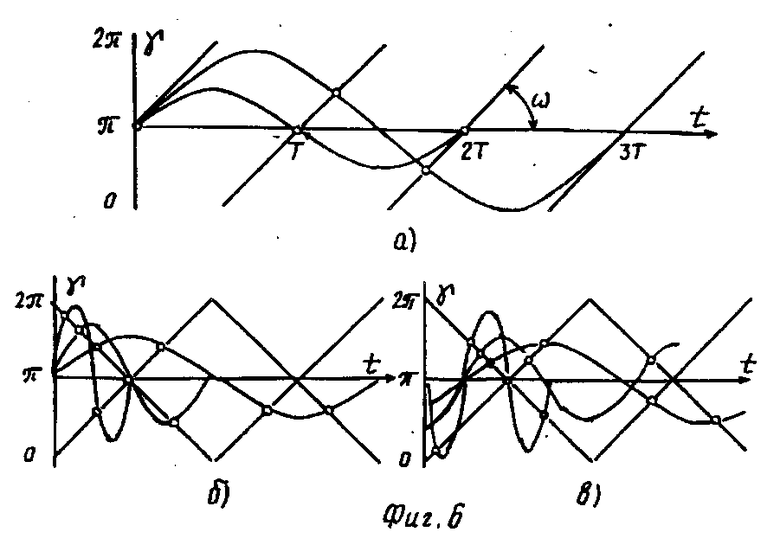
Сравнительную оценку частотной полосы пропускания, которую обеспечивают известный и предлагаемый способы, можно провести с помощью диаграмм угловой длительности импульсов γ = f(t), предложенных А.А. Булгаковым [3] для анализа систем импульсно-фазового управления, работающих по "вертикальному" принципу. Известны примеры использования данных диаграмм при оценке частотной полосы пропускания вентильных преобразователей электрической энергии [4, 5] . Согласно этому подходу за входное воздействие звена ШИМ-2 принимается непрерывный гармонический закон изменения длительности импульсов
γ(t) = π + γмsin(ωyt + ϕ)
который является функцией трех параметров: амплитуды γм , частоты ωy и начальной фазы ϕ . Следовательно, для восстановления данного воздействия по виду выходных импульсов необходимо иметь не менее трех точек встречи (импульсов) развертывающих сигналов и входного воздействия на периоде его изменения. Наличие трех точек встречи даст необходимое количество уравнений для отыскания всех указанных параметров входного воздействия
На диаграммах фиг. 6а изображено входное воздействие предельной частоты для способа ШИМ-2 в случаях малой и большой амплитуды. Видно, что при малых амплитудах входного воздействия предельная (граничная) частота может быть определена по теореме В.А. Котельникова, так как при этой частоте гарантируется указанный минимум точек встречи на периоде. Таким образом, в области малых амплитуд имеем первое условие, ограничивающее предельную полосу пропускаемых частот
При возрастании амплитуды полоса ограничивается более жестким требованием, согласно которому максимальная скорость изменения входного воздействия не может превысить критическую скорость, определяемую наклоном развертывающих сигналов. В принятых координатах этот наклон равен тактовой частоте модуляции, в связи с чем можно записать
откуда второе условие для области больших амплитуд имеет вид
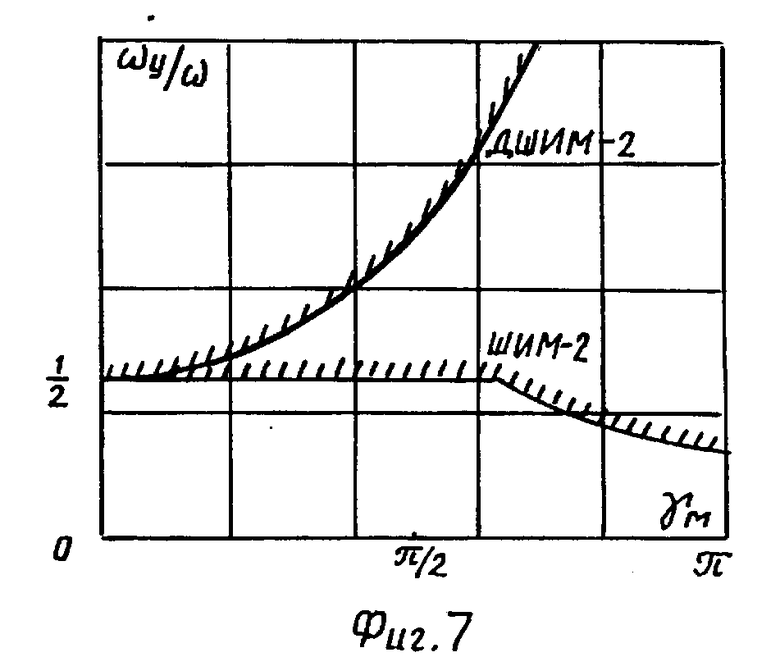
В соответствии с полученными зависимостями на графике с координатами: амплитуда γм и относительная частота  входного воздействия построена кривая, ограничивающая предельно достижимую частотную полосу пропускания звена ШИМ-2 (см. фиг. 7).
входного воздействия построена кривая, ограничивающая предельно достижимую частотную полосу пропускания звена ШИМ-2 (см. фиг. 7).
Очевидно, подобный подход можно применить и к звену ДШИМ-2. Так как все предложенные варианты реализации ДШИМ-2 приводят к одинаковому результату, анализ проведем для одного четвертого варианта, имеющего наиболее простую и наглядную графическую интерпретацию. Из диаграмм на фиг. 6 б,в видно, что в области достаточно малых амплитуд γм→ 0 сравниваемые способы обладают примерно одинаковыми возможностями, обусловленными тактовой частотой дискретизации. Это подтверждается тем, что независимо от фазы входного воздействия количество точек встречи на периоде не превышает трех-четырех. Однако с ростом амплитуды γм→ π период управляющего воздействия Ty может быть меньше, а частота ωy соответственно выше, так как увеличивается количество точек встречи за один и тот же промежуток времени. На графике фиг.6 б,в эта тенденция подтверждается на примере входных воздействий разной амплитуды и фазы. Важно отметить, что появляется принципиальная возможность воспроизведения входных воздействий с частотой, превышающей тактовую частоту. Продолжая анализ графика на фиг.6 б, можно потребовать, чтобы на интервале возрастания входного воздействия, равном четверти периода (Ty/4), было не менее одной точки встречи с развертывающим сигналом убывающей формы. Это требование выразится в виде
тогда после очевидных преобразований можно записать неравенство, ограничивающее предельную полосу пропускания для ДШИМ-2
Сравнивая приведенные на фиг. 7 графики, можно сделать вывод о том, что применение способа динамической модуляции наиболее целесообразно в случаях отработки входных воздействий большой амплитуды, когда частотные возможности известного способа ограничиваются явлением критической скорости. Полученная зависимость подтверждает, что при максимальной амплитуде γм→ π предельная частота ограничивается лишь собственным быстродействием элементов модулятора. Другим достоинством предложенного способа, как отмечалось, является симметричность реакции импульсного сигнала на возрастания и уменьшения управляющего воздействия. Очевидно, что данное свойство будет способствовать улучшению спектрального состава этого сигнала, уменьшению амплитудных и фазовых искажений основной гармонии, вносимых процессом модуляции.
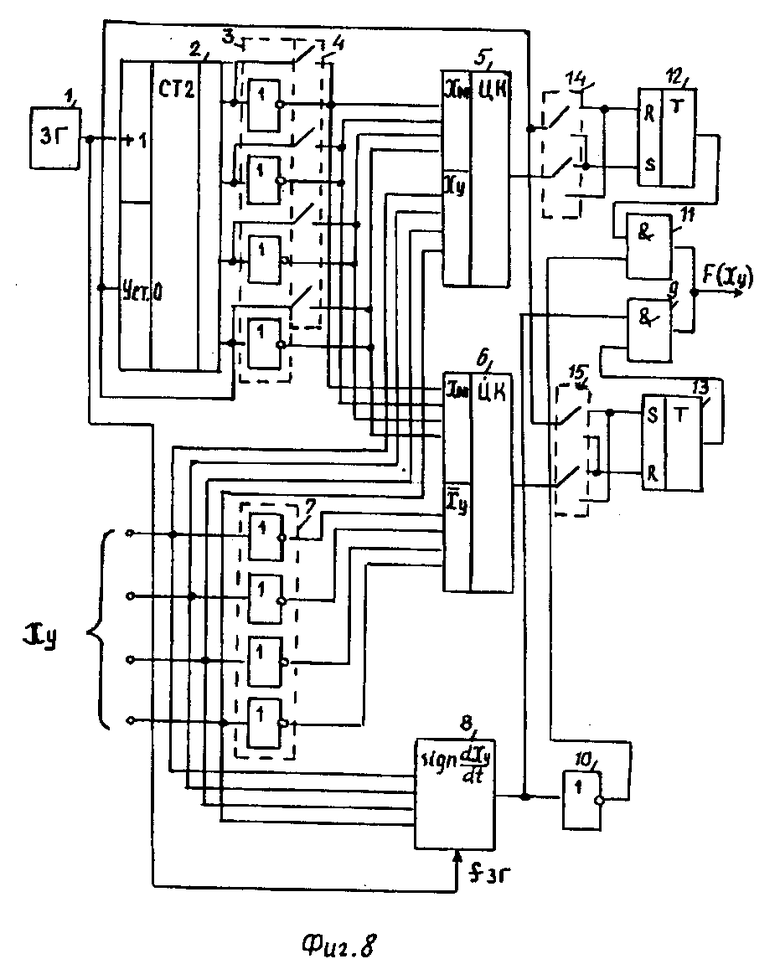
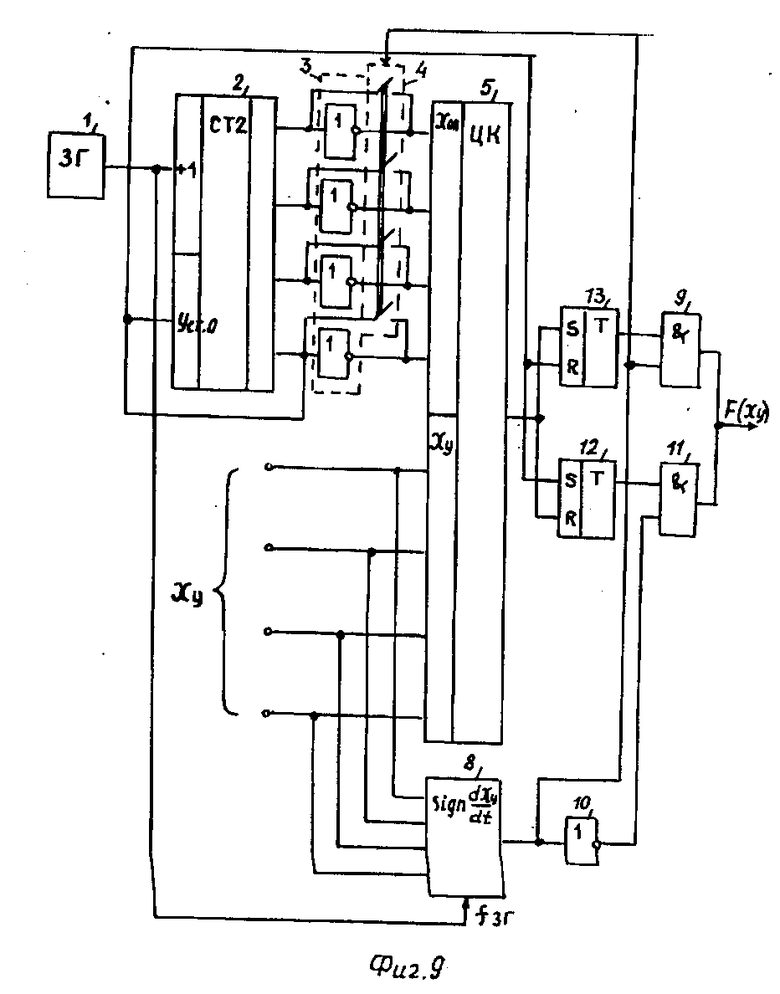
Практическая реализация предложенного способа возможна как на аналоговых, так и цифровых элементах на основе программного и аппаратного принципов. Ограничиваясь последним, рассмотрим в качестве примера схему широтно-импульсного модулятора, управляющие и развертывающие сигналы которого представлены в 4-разрядном двоичном параллельном коде (см. фиг. 8).
Устройство содержит задающий генератор 1 (ЗГ), выход которого подключен к суммирующему входу двоичного счетчика 2 (СТ2). Всеми разрядами выходного числа счетчик подключен посредством логических схем инверсии 3, зашунтированных ключами 4, в параллель ко входам первого 5 и второго 6 цифровых компараторов (ЦК). На другие входы первого цифрового компаратора подаются разряды управляющего кода Xy. Эти же разряды посредством логических схем инверсии 7 подаются на другие входы второго цифрового компаратора, а также на входы устройства 8, служащего для определения сигнатурной функции производной управляющего сигнала sign (dXy/dt). Выход последнего подключен к первому входу логической схемы совпадения 9, а также посредством логической схемы инверсии 10 к первому входу логической схемы совпадения 11. Вторыми входами указанные схемы совпадения подключены к входам триггеров 12, 13 соответственно. Своими R, S-входами триггеры подключены посредством реверсивных ключей 14, 15 к выходам цифровых компараторов, а также к старшему разряду счетчика, соединенному со служебным входом "Установка нуля". Выходы логических схем совпадения объединены и служат для получения выходного импульсного сигнала F(Xy).
Данное устройство работает в соответствии с предложенными первым и вторым вариантами способа ДШИМ-2 согласно п. 2, 3 формулы изобретения. В зависимости от состояния ключей 4, 14,15 можно осуществлять модуляцию на основе развертывающих сигналов возрастающей или убывающей формы. Рассмотрим работу устройства при замкнутом состоянии ключей 4 и соответственно нижнем положении реверсивных ключей 4, 15. Тогда устройство будет функционировать в соответствии с диаграммами на фиг. 3а. При поступлении импульсов задающего генератора fзг на суммирующий вход счетчика на выходах последнего будет формироваться линейно возрастающий код развертывающего сигнала Xоп. Появление единицы в старшем разряде этого числа будет приводить к сбросу счетчика, в связи с чем код развертывающего числа будет воспроизводить периодический сигнал возрастающей формы. Период этого сигнала будет определять тактовую частоту модуляции, которая при наличии 4-х разрядов будет в 16 раз меньше частоты задающего генератора. С помощью ключей 4 прямой код развертывающего сигнала подается непосредственно на входы первого цифрового компаратора, на другие входы которого поступает прямой код управляющего сигнала. Полагается, что в моменты равенства указанных кодов на выходе компаратора выделяется импульс положительного знака, который с помощью ключа 14 поступает на R-вход триггера 12. На S-вход данного триггера поступают импульсы тактовой частоты. В результате на выходе триггера 12 будет формироваться импульсный сигнал с модуляцией заднего фронта. Благодаря схемам инверсии 7 на входы второго цифрового компаратора будет поступать инверсный код управляющего сигнала  , изменяющийся в противофазе по отношению к прямому коду Xy. Импульсы с выхода второго компаратора подаются с помощью ключа 15 на S-вход триггера 13. На R-вход данного триггера поступают импульсы тактовой частоты, в результате на его выходе будет формироваться импульсный сигнал
, изменяющийся в противофазе по отношению к прямому коду Xy. Импульсы с выхода второго компаратора подаются с помощью ключа 15 на S-вход триггера 13. На R-вход данного триггера поступают импульсы тактовой частоты, в результате на его выходе будет формироваться импульсный сигнал  с модуляцией переднего фронта. Подача этих импульсов на выход разрешается с помощью логической схемы совпадения 9 только при положительном знаке производной управляющего сигнала. При отрицательном знаке указанная логическая схема совпадения будет блокирована, и на выход поступят импульсы триггера 12, подача которых будет разрешена логической схемой совпадения 11. Таким образом, выходной импульсный сигнал модулятора F(Xy) будет формироваться согласно п. 1 формулы изобретения. При разомкнутом состоянии ключей 4 и верхнем положении реверсивных ключей 14,15 модуляции будет осуществляться на основе развертывающих сигналов убывающей формы в соответствии с диаграммами на фиг. 3б.
с модуляцией переднего фронта. Подача этих импульсов на выход разрешается с помощью логической схемы совпадения 9 только при положительном знаке производной управляющего сигнала. При отрицательном знаке указанная логическая схема совпадения будет блокирована, и на выход поступят импульсы триггера 12, подача которых будет разрешена логической схемой совпадения 11. Таким образом, выходной импульсный сигнал модулятора F(Xy) будет формироваться согласно п. 1 формулы изобретения. При разомкнутом состоянии ключей 4 и верхнем положении реверсивных ключей 14,15 модуляции будет осуществляться на основе развертывающих сигналов убывающей формы в соответствии с диаграммами на фиг. 3б.
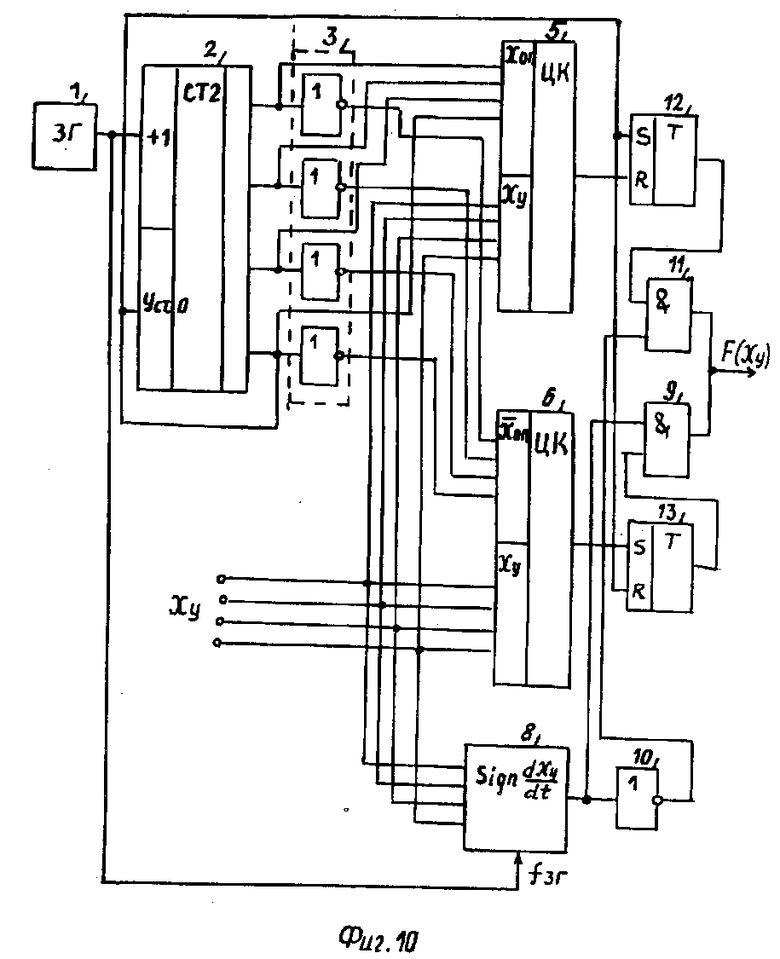
Для реализации третьего варианта предложенного способа может служить схема модулятора на фиг. 9. Данная схема отличается от рассмотренной наличием одного цифрового компаратора 5, отсутствием логических схем инверсии в канале управляющего сигнала, а также тем, что ключи 4 должны быть управляемыми. Состояние данных ключей должен определять сигнал с выхода устройства 8. Полагается, что при положительном знаке производной управляющего сигнала ключи 4 должны быть разомкнутыми. Тогда с выходов логических схем инверсии 3 на входы компаратора поступит инверсный код развертывающего сигнала, изменяющийся по закону убывающей функции. В моменты равенства входных кодов на выходе компаратора будет выделяться импульс положительного знака. Поступление этих импульсов, а также тактовых импульсов на R, S-входы триггеров 12, 13 приведет к появлению на их выходах импульсных последовательностей. При положительном знаке производной управляющего сигнала логическая схема совпадения 11 будет блокирована, и на вход с помощью логической схемы 9 будет поступать только одна импульсная последовательность с выхода триггера 13, модуляция которой осуществляется за счет изменения положения передних фронтов импульсов. При изменении знака производной с положительного на отрицательный ключи 4 зашунтируют логические схемы инверсии 3, в результате фаза развертывающего сигнала изменится на 180o и на входы компаратора начнет поступать код развертывающего сигнала периодической линейно возрастающей формы. Одновременно сигналом с выхода устройства 8 логическая схема совпадения 9 будет блокирована, и на выход начнет поступать импульсная последовательность триггера 12, модуляция которой происходит за счет сдвига задних фронтов импульсов. Таким образом, работа данного устройства происходит согласно диаграммам на фиг. 4 в соответствии с п. 4 формулы изобретения. Для реализации четвертого варианта предложенного способа может служить схема модулятора на фиг. 10. Отличие данной схемы заключается в отсутствии ключевых элементов. Если на входы первого цифрового компаратора поступает прямой код развертывающего сигнала, то на входы второго компаратора с выходов логических схем инверсии поступает инверсный код развертывающего сигнала. На другие входы указанных компараторов подается в параллель код управляющего сигнала. В остальном устройство и работа данного варианта схемы модулятора аналогичны рассмотренному. На вход модулятора поступает в каждый момент времени одна из двух импульсных последовательностей, выделяющихся на выходах триггеров 12, 13. Работа происходит согласно диаграммам на фиг. 5, в соответствии с п. 5 формулы изобретения.
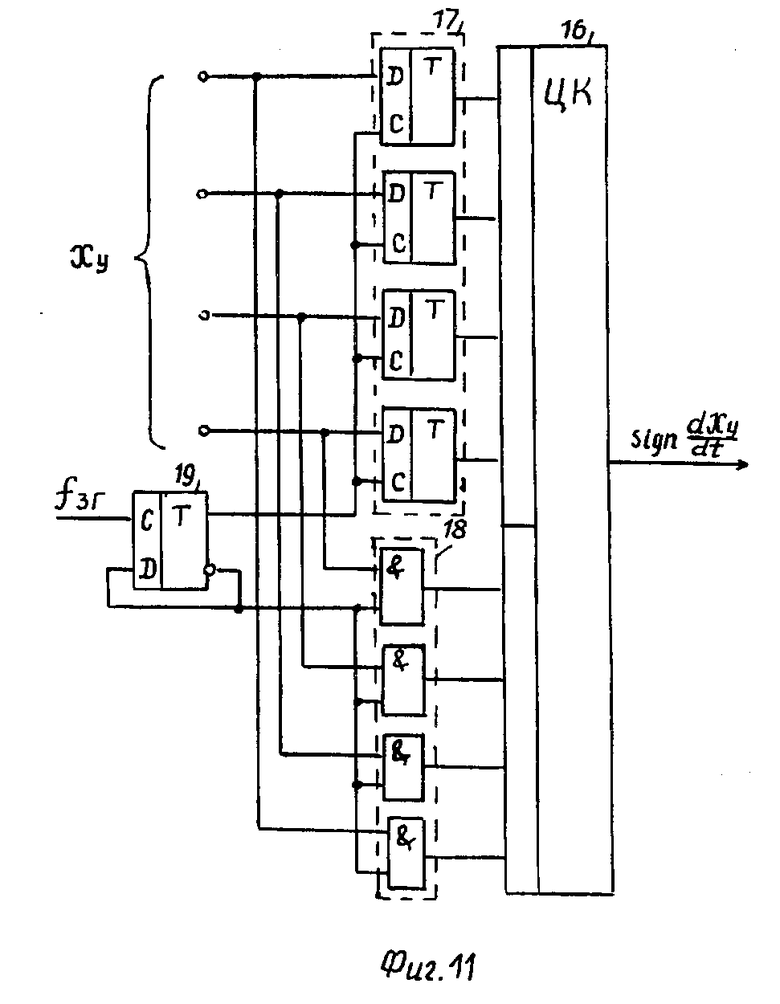
Общей составной частью всех предложенных вариантов является устройство определения знака производной управляющего сигнала 8. Возможная схема выполнения данного устройства представлена на фиг. 11. Устройство работает по принципу поразрядного сравнения значений кода управляющего сигнала в двух соседних тактах работы задающего генератора. Сравнение ведется с помощью цифрового компаратора 16, первые входы которого служат для подачи кода управляющего сигнала Xy, причем эта подача осуществляется с помощью запоминающих D-триггеров 17. Вторые входы служат также для подачи кода управляющего сигнала Xy, однако в данной части подача осуществляется с помощью логических схем совпадения 18. Тактовые С-входы указанных триггеров объединены и подключены к прямому выходу счетного триггера 19, выполненного в данном случае на основе Д-триггера. К инверсному выходу последнего подключены в параллель вторыми входами указанные логические схемы совпадения. На счетный вход триггера 19 подается импульсный сигнал задающего генератора fзг. Период импульсного сигнала на выходах триггера 19 и соответственно период работы всего устройства состоит из двух тактов задающего генератора. В первом такте наличие единицы на прямом и нуля на инверсном выходах этого триггера переводит запоминающие триггеры 17 в режим записи, в результате на их выходах появятся значения разрядов управляющего сигнала, которые имеют место в первом такте. Одновременно с этим логические схемы совпадения 18 будут блокированы, при этом полагается, что компаратор в связи с отсутствием сигналов на вторых входах сохраняет свое предыдущее состояние. Во втором такте инверсия импульсного сигнала на выходах триггера 19 будет способствовать переводу триггеров 17 в режим памяти, то есть сохранения на своих выходах кода управляющего числа, записанного в первом такте. Вместе с этим логические схемы 18 пропустят на вторые входы компаратора новые значения разрядов управляющего числа, имеющие место во втором такте. Таким образом цифровой компаратор во втором такте получает возможность сравнения кодов управляющего сигнала, которые имели место в двух соседних тактах. При этом полагается, что, если управляющий сигнал возрастает, значения разрядов кода во втором такте будут превышать значения кода в первом такте, и на выходе компаратора появится единичный сигнал положительного знака. В противоположном случае на выходе компаратора появится нулевой сигнал.
Представленные схемы позволяют сделать вывод, что способ динамической широтно-импульсной модуляции достаточно прост и разновариантен в своей реализации. Возможность выбора варианта делает данный способ более доступным и расширяет области его возможного применения. Эти области не ограничиваются устройствами, работающими только в динамических режимах. В случаях, когда изменения управляющего воздействия происходят с разной скоростью или чередуются с работой в установившемся режиме, основным способом управления может остаться ШИМ-2, а переход к предложенному способу ДШИМ-2 может происходить только при отработке быстроменяющихся сигналов, скорость которых соизмерима с критической. В подобном случае представленные схемы не претерпят изменений, кроме того, что компаратор в составе устройств определения знака производной управляющего сигнала должен обладать некоторой зоной нечувствительности.
Источники информации
1. Теория импульсной радиосвязи. /Под ред. В.И. Сифорова, Л., ЛКВВИА, 1951.
2. Слепов Н.Н., Дроздов Б.В. Широтно-импульсная модуляция. М.: Энергия, 1978, с. 192.
3. Булгаков А.А. Новая теория управляемых выпрямителей. М.: Наука, 1970, с. 320.
4. Шипилло В.П. Автоматизированный вентильный электропривод. М.: Энергия, 1969, с. 19-23.
5. Грабовецкий Г. В. Тиристорные преобразователи частоты с непосредственной связью и естественной коммутацией для частотного-регулируемого электропривода. Электротехника, 1975, N 5, с. 25-28.
Изобретение может быть применено в управляемых импульсных устройствах, работающих по принципу односторонней широтно-импульсной модуляции второго рода, реализация которой осуществляется на основе сравнения управляющего и периодически изменяющегося развертывающего сигналов, и обеспечивает расширение частотной полосы пропускания без необходимости увеличения тактовой частоты модуляции и сопутствующего снижения энергетических показателей. Для этого вырабатывают две последовательности импульсов, у одной из которых модуляция ширины импульсов осуществляется за счет положения задних фронтов, а у другой - за счет изменения положения передних фронтов, но пропускают на выход модулятора одну или другую последовательность в зависимости от знака производной управляющего сигнала. В результате обеспечиваются симметричность и предельная скорость импульсной реакции на возрастания и уменьшения управляющего сигнала независимо от скорости последнего. Указанный эффект достигается за счет создания условий, при которых развертывающий и управляющий сигналы в любой момент изменяются во встречных направлениях. Переход от обычного к предложенному способу наиболее целесообразен при больших амплитудах и скоростях изменения управляющего воздействия, а реализация возможна в четырех вариантах, обеспечивающих одинаковый результат. 4 з.п. ф-лы, 11 ил.
| Слепов Н.Н., Дроздов Б.В | |||
| Широтно-импульсная модуляция | |||
| - М.: Энергия, 19 78, с.192. |
