Изобретение относится к геофизическому приборостроению, а также может быть использовано в вибротехнике.
Известен электродинамический сейсмоприемник с выходным сигналом, пропорциональным скорости перемещения его корпуса, и с уменьшенным коэффициентом нелинейных искажений [1], содержащий магнит, два полюсных наконечника, ограниченных по длине кольцевой и торцевой поверхностью и установленных на магните, магнитопровод с опорными торцами и проточкой, создающей два полюсных наконечника, совпадающих по длине с полюсными наконечниками, установленными на магните, и две обмотки, намотанные на каркасах катушки и размещенные между внешними и внутренними кольцевыми поверхностями в воздушных зазорах, образованных полюсными наконечниками, установленными на магните, и полюсными наконечниками магнитопровода. Расстояние между внешней кольцевой поверхностью обмотки и торцевой поверхностью полюсного наконечника равно расстоянию между внутренней кольцевой поверхностью обмотки и кольцевой поверхностью полюсного наконечника и превышает длину полюсного наконечника на 1/8 размера воздушного зазора.
Недостаток электродинамического сейсмоприемника заключается в том, что в нем длина обмотки больше длины полюсного наконечника и значительное количество витков обмотки находится в нелинейной части распределения магнитной индукции, действующей на краях и за пределами воздушного зазора, не позволяя получить в сейсмоприемнике наименьший коэффициент нелинейных искажений. Кроме того, сейсмоприемник ограничивает спектр преобразуемых сейсмических колебаний, обладая свойством фильтра высоких частот, подавляющего низкочастотные составляющие сейсмического сигнала до частоты собственных колебаний с крутизной 12 дБ на октаву.
Известен высокоразрешающий геофон с выходным сигналом, пропорциональным скорости перемещения его корпуса [2], содержащий:
цилиндрический корпус;
узел постоянного магнита, состоящий из цилиндрического магнита, имеющего продольную ось, плоские торцы, коэрцитивную силу более 4000 эрстед, остаточную индукцию более 6000 гаусс и дискообразные полюсные наконечники, расположенные на противоположных концах магнита с соединением одного конца каждого полюсного наконечника с одним концом магнита;
средства, крепящие узел постоянного магнита в цилиндрическом корпусе с кольцевым зазором между узлом магнита и корпусом так, что магнитное поле возникает между полюсными наконечниками и цилиндрическим корпусом в кольцевом зазоре;
катушку, имеющую две соосно расположенные обмотки из электропроводящего провода с длиной каждой обмотки меньше длины полюсного наконечника, причем длина каждого полюсного наконечника измеряется от торца магнита, с которым он соединен, до противоположного конца полюсного наконечника;
упругие средства, поддерживающие катушку в кольцевом зазоре вместе с каждой обмоткой, отцентрированной напротив соответствующего полюсного наконечника, в то время, когда катушка находится в состоянии покоя, готовая к тем перемещениям в магнитном поле вдоль продольной оси корпуса и магнита, которые вызываются сейсмическими колебаниями, преобразуемыми в электрический сигнал.
Постоянный магнит геофона изготовлен из прессованного порошка редкоземельного материала самария с кобальтом.
Геофон ограничивает спектр преобразуемых сейсмических колебаний, обладая свойством фильтра высоких частот, подавляющего низкочастотные составляющие сейсмического сигнала до частоты собственных колебаний с крутизной 12 дБ на октаву. В геофоне значительная часть магнитного потока, проходя за пределами катушки, теряется. Совершено линейное магнитное поле располагается на длине, составляющей приблизительно половину длины полюсного наконечника. Сокращение длины обмотки до значения, равного половине длины полюсного наконечника, позволило бы уменьшить коэффициент нелинейных искажений, но приведет в этом геофоне к еще большей потере магнитного потока, а при сохранении полученных параметров - к увеличению габаритных размеров и массы. Кроме того, примененный в геофоне постоянный магнит из прессованного и спеченного порошка самария с кобальтом теряет свои свойства от ударов геофона при работе в полевых условиях.
Наиболее близким по техническому решению является сейсмоприемник ускорений [3], содержащий магнитную систему, состоящую из постоянного магнита с выбранной магнитной индукцией B и напряженностью H в точке, соответствующей максимуму удельной магнитной энергии на графике удельного магнитного потока, отдаваемого постоянным магнитом в воздушные зазоры, из двух полюсных наконечников, установленных на постоянном магните, из магнитопровода с двумя полюсными наконечниками, выполненными в нем концентрично и совпадающими по длине с полюсными наконечниками, установленными на постоянном магните и образующими с ними два воздушных кольцевых зазора, механическое колебательное звено, состоящее из катушки с двумя обмотками, намотанными на проводящих кольцах и расположенными в воздушных кольцевых зазорах, и из двух пружин, соединяющих катушку с магнитной системой.
Недостаток сейсмоприемника ускорений заключается в том, что в нем, как и в [1], длина обмотки больше длины полюсного наконечника и значительное количество витков обмотки находится в нелинейной части распределения магнитной индукции, действующей на краях и за пределами воздушного зазора, не позволяя получить в сейсмоприемнике наименьший коэффициент нелинейных искажений.
Цель изобретения - уменьшение коэффициента нелинейных искажений сейсмоприемника ускорений, позволяющее увеличить его мгновенный динамический диапазон и разрешающую способность сейсморазведки.
Поставленные цели достигаются тем, что в сейсмоприемнике ускорений, содержащем магнитную систему, состоящую из постоянного магнита с выбранной магнитной индукцией B и напряженностью H в точке, соответствующей максимуму удельной магнитной энергии на графике удельного магнитного потока, отдаваемого постоянным магнитом в воздушные зазоры, из двух полюсных наконечников, имеющих длину Lп и установленных на постоянном магните, из магнитопровода с двумя полюсными наконечниками, совпадающими по длине Lп с полюсными наконечниками, установленными на постоянном магните и образующими с ними два воздушных кольцевых зазора, каждый из которых равен Δ, механическое колебательное звено, состоящее из катушки с двумя обмотками, расположенными в воздушных кольцевых зазорах и намотанными по длине Lо на проводящие каркасы, имеющие внешнюю и внутреннюю кольцевые поверхности, из двух пружин, соединяющих катушку с магнитной системой, расстояние между внешней и внутренней кольцевыми поверхностями каждого проводящего каркаса равно длине полюсного наконечника Lп, а объем, занимаемый каждым проводящим каркасом в каждом воздушном кольцевом зазоре, больше половины объема, заполняемого катушкой в каждом воздушном кольцевом зазоре, при этом длина полюсного наконечника Lп, диаметр D и длина L постоянного магнита связаны с выбранными параметрами электродинамического сейсмоприемника ускорений соотношениями
где Хо - относительное перемещение магнитной системы и катушки при максимальном перемещении магнитной системы;
g - ускорение земного притяжения;
ϕ - предельный угол наклона сейсмоприемника;
π = 3,1416;
fо - частота собственных колебаний сейсмоприемника;
α - коэффициент, равный 1,3 - 1,4, учитывает долю магнитного потока, протекающего за пределами воздушного кольцевого зазора с шириной, ограниченной длиной Lп полюсного наконечника;
q - коэффициент усреднения квадрата магнитной индукции;
β - степень затухания;
ρ - удельное сопротивление материала каркаса катушки;
δ - плотность катушки, равная всей ее массе, отнесенной к объему, занимаемому катушкой в воздушных кольцевых зазорах магнитной системы;
t - толщина стенки полюсного наконечника;
μ0 - магнитная проницаемость воздуха, равная 1,256•10-6 Г/м;
h - глубина паза для размещения обмотки;
a1 - зазор между полюсным наконечником и внутренней цилиндрической поверхностью катушки;
a2 - зазор между внешней цилиндрической поверхностью катушки и полюсным наконечником магнитопровода;
На чертеже изображены сейсмоприемник ускорений и график распределения магнитной индукции в воздушном кольцевом зазоре.
Магнитная система сейсмоприемника ускорений состоит из постоянного магнита 1, двух полюсных наконечников 2 и 3, магнитопровода 4 и двух одинаковых полюсных наконечников 5, выполненных заодно с магнитопроводом. Полюсные наконечники 2 и 5, 3 и 5 образуют в магнитной системе два воздушных кольцевых зазора. Фланцы 6 и 7 обеспечивают соосное расположение полюсных наконечников 2 и 3 с полюсными наконечниками 5 магнитопровода.
Механическое колебательное звено состоит из катушки 8, двух одинаковых пружин 9, соединяющих катушку с магнитной системой, и двух одинаковых электромагнитных демпферов - проводящих каркасов 10 катушки, размещенных в воздушных кольцевых зазорах магнитной системы. Каждый проводящий каркас имеет наружную 11 и внутреннюю 12 кольцевую поверхность. Две одинаковые обмотки 13, намотанные на проводящие каркасы катушки, являются электродинамическими преобразователями.
Распределение магнитной индукции в воздушном кольцевом зазоре и за его пределами изображено графиком 14.
Конструктивные параметры сейсмоприемника ускорений имеют обозначения: D и L - диаметр и длина постоянного магнита, Δ - длина воздушного кольцевого зазора, Lп - длина полюсного наконечника, Lо - длина обмотки, t - толщина стенки полюсного наконечника, а1 и а2 - зазоры между полюсными наконечниками и катушкой. Максимальное значение магнитной индукции в воздушном кольцевом зазоре обозначено через Bм.
Сейсмоприемник ускорений работает так.
Корпус сейсмоприемника, связанный с исследуемым объектом, передает колебания объекта магнитной системе. Механическое колебательное звено преобразует колебания магнитной системы в колебательные перемещения магнитной системы относительно инерционного элемента - катушки. Электродинамические преобразователи - обмотки катушки, размещенные в воздушных кольцевых зазорах магнитной системы, преобразуют относительные колебательные перемещения магнитной системы и катушки в напряжение. Каркасы катушки, занимающие более половины объема воздушных кольцевых зазоров, создают степень затухания электродинамического сейсмоприемника в несколько единиц и преобразуют его в сейсмоприемник ускорений с выходным сигналом (напряжением на обмотках), пропорциональным ускорению перемещений корпуса сейсмоприемника в частотном диапазоне тем более широком, чем больше степень затухания.
Обмотки катушки расположены в тех местах воздушных кольцевых зазоров, где магнитная индукция имеет постоянное значение, равное Bм.
Проведенные экспериментальные исследования распределения магнитной индукции в воздушных кольцевых зазорах магнитных систем с полюсными наконечниками на постоянном магните и магнитопроводе показали: магнитная индукция имеет значение Вм, начиная с точки, расположенной на расстоянии Δ от одного края полюсного наконечника, и заканчиваясь в точке, расположенной на расстоянии Δ до другого края полюсного наконечника на длине, равной Lп - 2 Δ. Если обмотки не будут выходить за эти пределы при максимальном сигнале и максимальном угле наклона корпуса, то сейсмоприемник ускорений будет иметь наименьший коэффициент нелинейных искажений.
Для вертикального сейсмоприемника ускорений возможно более рациональное использование длины, равной Lп - 3 Δ. Расположим катушку в вертикальном положении сейсмоприемника ускорений ниже среднего положения, тогда она при угле наклона корпуса, равном приблизительно половине предельного угла наклона, займет положение, показанное на фиг. 1, а при предельном угле наклона будет располагаться выше среднего положения.
Найдем зависимость размера длины полюсного наконечника Lп, диаметра D и длины L постоянного магнита от выбранных параметров сейсмоприемника ускорений и магнитных свойств сплава постоянного магнита. Задавшись длиной обмотки Lо, максимальным перемещением сейсмоприемника и соответствующим ему относительным перемещением магнитной системы и катушки Xо, предельным углом наклона сейсмоприемника ϕ, получим формулу для расчета длины полюсного наконечника Lп:
При этом внешняя и внутренняя кольцевые поверхности каждой обмотки катушки будут располагаться в вертикально расположенном сейсмоприемнике ниже, а в сейсмоприемнике, наклоненном на предельный угол, выше соответствующих краев полюсных наконечников на расстояние γ, равное: .
.
Диаметр D постоянного магнита найдем из приведенного в источнике [4] уравнения, связывающего весь магнитный поток, вытекающий из торца постоянного магнита, с магнитным потоком, протекающим через воздушный кольцевой зазор магнитной системы:
где Bм - значение магнитной индукции в середине воздушного кольцевого зазора.
Найдем магнитную индукцию Bм из приведенного в источнике [4] уравнения, связывающего степень затухания β с Bм: ,
,
где Кп - коэффициент преобразования проводящего каркаса;
m - масса катушки;
ω0 - - круговая частота собственных колебаний механического колебательного звена;
R - сопротивление проводящего каркаса;
Vк - объем, занимаемый проводящим каркасом в одном воздушном кольцевом зазоре;
V - объем, занимаемый катушкой в воздушных кольцевых зазорах;
V1 - объем, занимаемый катушкой в одном воздушном кольцевом зазоре.
Выразив Bм и подставив его значение в предыдущее уравнение, после преобразований получим уравнение для расчета диаметра D постоянного магнита:
Объем Vк, занимаемый проводящим каркасом в одном воздушном кольцевом зазоре, равен: Vк = V1 - Vо, где Vо - объем, занимаемый обмоткой катушки.
Тогда отношение V1 к Vк примет вид
Выразив объемы Vо и V1 через их размеры, приведенные на фиг. 1, получим
Т. к. отношение делимого: Δ -а1-а2-h к делителю: D+2t+ Δ +a1-a2 значительно меньше единицы, то отношение Vо к V1 с достаточной точностью будет выражаться формулой
А отношение V1 и Vк примет вид
Подставив найденное отношение V1 к Vк в уравнение для определения диаметра D постоянного магнита и решив его, получим
Длину постоянного магнита L найдем из приведенного в источнике [4] уравнения:
где SL - площадь цилиндрической поверхности, проходящей посредине длины воздушного зазора.
В соответствии с источником [3] выразим SL формулой
SL = π(D+2t+Δ)Lпα.
Подставив значение SL в предыдущую формулу и решив относительно L, получим уравнение для расчета длины L постоянного магнита:
Из начального уравнения для расчета диаметра D постоянного магнита найдем Lп:
Подставив значение Lп в уравнение для расчета L, найдем
В формулах для расчета D и L остался неизвестным коэффициент усреднения квадрата магнитной индукции q. В соответствии с источником [4] значение q получим из формулы
Полученные формулы, связывающие D и L с выбранными параметрами сейсмоприемника, постоянного магнита и значениями коэффициентов, позволяют вычислить, задавшись размерами воздушного зазора, размеры постоянного магнита или, задавшись параметрами постоянного магнита, вычислить размеры воздушного зазора Δ и Lп.
Предлагаемое техническое решение позволит создать сейсмоприемник ускорений с наименьшим коэффициентом нелинейных искажений, позволяющим увеличить его мгновенный динамический диапазон и разрешающую способность сейсморазведки. Сейсмоприемник ускорений найдет применение при проведении сейсморазведочных работ по методу высокоразрешающей сейсморазведки и может быть использован в качестве контрольного прибора в вибросейсмических источниках.
Источники информации
1. Патент РФ N 2084004, кл. G 01 V 1/16.
2. Патент США N 5469408, кл. H 04 R 9/02.
3. Патент РФ N 2098844, кл. G 01 V 1/16.
4. Патент РФ N 1720037, кл. G 01 V 1/16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК С УМЕНЬШЕННЫМ КОЭФФИЦИЕНТОМ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ | 1995 |
|
RU2084004C1 |
| Электродинамический преобразовательный блок сейсмоприемника | 1989 |
|
SU1748105A1 |
| Электродинамический преобразователь сейсмоприемника | 1988 |
|
SU1735788A1 |
| Электродинамический преобразовательный блок сейсмоприемника | 1989 |
|
SU1728821A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Электродинамический возбудитель колебаний | 1982 |
|
SU1130417A1 |
| Электродинамический вибратор | 1981 |
|
SU1058633A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1972 |
|
SU333508A1 |
Использование: в геофизическом приборостроении, а также может быть применено в вибротехнике. Сущность изобретения: сейсмоприемник содержит магнитную систему, состоящую из постоянного магнита с выбранной магнитной индукцией В и напряженностью Н в точке, соответствующей максимуму удельной магнитной энергии на графике удельного магнитного потока, отдаваемого постоянным магнитом в воздушные зазоры, из двух полюсных наконечников, имеющих длину Lп и установленных на постоянном магните, из магнитопровода с двумя полюсными наконечниками, совпадающими по длине Lп с полюсными наконечниками, установленными на постоянном магните и образующими с ними два воздушных кольцевых зазора, каждый из которых равен Δ, механическое колебательное звено, состоящее из катушки с двумя обмотками, расположенными в воздушных кольцевых зазорах и намотанными по длине Lо на проводящие каркасы, имеющие внешнюю и внутреннюю кольцевые поверхности, из двух пружин, соединяющих катушку с магнитной системой. Расстояние между внешней и внутренней кольцевыми поверхностями каждого проводящего каркаса равно длине полюсного наконечника Lп, а объем, занимаемый каждым проводящим каркасом в каждом воздушном кольцевом зазоре, больше половины объема, заполняемого катушкой в каждом воздушном кольцевом зазоре. Длина полюсного наконечника Lп, диаметр D и длина L постоянного магнита связаны с выбранными параметрами электродинамического сейсмоприемника ускорений заданными соотношениями. Технический результат: увеличение мгновенного динамического диапазона сейсмоприемника, повышение разрешающей способности сейсморазведки. 1 ил.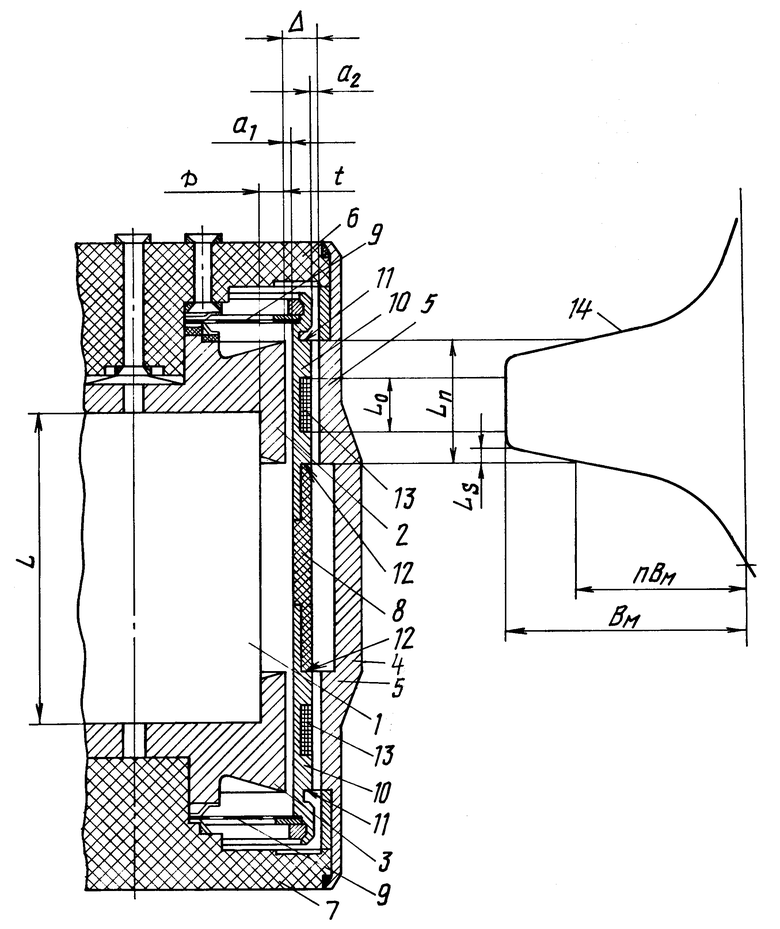
Электродинамический сейсмоприемник ускорений с наименьшим коэффициентом нелинейных искажений, содержащий магнитную систему, состоящую из постоянного магнита с выбранной магнитной индукцией B и напряженностью H в точке, соответствующей максимуму удельной магнитной энергии на графике удельного магнитного потока, отдаваемого постоянным магнитом в воздушные зазоры, из двух полюсных наконечников, имеющих длину Ln и установленных на постоянном магните, из магнитопровода с двумя полюсными наконечниками, совпадающими по длине Lп с полюсными наконечниками, установленными на постоянном магните и образующими с ними два воздушных кольцевых зазора, каждый из которых равен Δ, механическое колебательное звено, состоящее из катушки с двумя обмотками, расположенными в воздушных кольцевых зазорах и намотанными по длине Lo на проводящие каркасы, имеющие внешнюю и внутреннюю кольцевые поверхности, из двух пружин, соединяющих катушку с магнитной системой, отличающийся тем, что в нем расстояние между внешней и внутренней кольцевыми поверхностями каждого проводящего каркаса равно длине полюсного наконечника Lп, а объем, занимаемый каждым проводящим каркасом в каждом воздушном кольцевом зазоре, больше половины объема, заполняемого катушкой в каждом воздушном кольцевом зазоре, при этом длина полюсного наконечника Lп, диаметр D и длина L постоянного магнита связаны с выбранными параметрами электродинамического сейсмоприемника ускорений соотношениями:
где Xo - относительное перемещение магнитной системы и катушки при максимальном перемещении магнитной системы;
g - ускорение земного притяжения;
ϕ - предельный угол наклона сейсмоприемника;
π = 3,1416;
fo - частота собственных колебаний сейсмоприемника;
α - коэффициент, равный 1,3 - 1,4, учитывает долю магнитного потока, протекающего за пределами воздушного кольцевого зазора с шириной, ограниченной длиной Lп полюсного наконечника;
q - коэффициент усреднения квадрата магнитной индукции;
β - степень затухания;
ρ - удельное сопротивление материала каркаса катушки;
δ - плотность катушки, равная всей ее массе, отнесенной к объему, занимаемому катушкой в воздушных кольцевых зазорах магнитной системы;
t - толщина стенки полюсного наконечника;
μo - магнитная проницаемость воздуха, равная 1,256 x 10-6 Г/м;
h - глубина паза для размещения обмотки;
α1 - зазор между полюсным наконечником и внутренней цилиндрической поверхностью катушки;
α2 - зазор между внешней цилиндрической поверхностью катушки и полюсным наконечником магнитопровода.
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК С УМЕНЬШЕННЫМ КОЭФФИЦИЕНТОМ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ | 1995 |
|
RU2084004C1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| US 3924261 A, 02.12.1975 | |||
| US 4159464 A, 26.06.1979 | |||
| СПОСОБ КОНТАКТНОЙ МИКРОСОСУДИСТОЙ ДОППЛЕРОГРАФИИ | 2001 |
|
RU2231978C2 |
| DE 3307575 A1, 06.09.1984. | |||
