(5) ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Сейсмоприемник | 1974 |
|
SU575592A1 |
| Сейсмоприемник | 1987 |
|
SU1509771A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1994 |
|
RU2082991C1 |
| Сейсмоприемник | 1989 |
|
SU1608606A1 |
| Сейсмоприемник | 1982 |
|
SU1056104A1 |
| Устройство для регулирования жесткостиупРугОй пОдВЕСКи иНЕРциОННОй МАССыСЕйСМОпРиЕМНиКА | 1978 |
|
SU842673A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК УСКОРЕНИЙ С НАИМЕНЬШИМ КОЭФФИЦИЕНТОМ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ | 1999 |
|
RU2155358C1 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| Электродинамический сейсмоприемник | 1978 |
|
SU813348A1 |
1
Изобретение относится к геофизическим приборам и может быть использовано в полевой и разведочной сейсмометрии .
Известны сейсмоприемники, содержащие корпус, магнитную систему и подвижную катушку, соединенную с корпусом упругим подвесом.
Магнитная система этих сейсмоприемников состоит из цилиндрического магнита, закрепленного в корпусе, одновременно являющемся магнитопроводом. Подвижная катушка размещена в кольцевом зазоре между магнитом , .и корпусом и соединена с корпусом предварительно напряженными ирисовыми пружинами, принимающими приблизительно плоскую форму под действием веса катушки l.
Однако описанные сейсмопрйемники имеют существенные недостатки, одним из которых является зависимость собственной частоты от угла наклона сейсмоприемника. Это явление обусловлено нелинейностью нагрузочной характеристики упругого подвеса, состоящего из ирисовых пружин. Изменение составляющей силы веса, прило.женного к пружинам в зависимости от угла наклона приводит к изменению положения катушки, связанной с пружинами, при этом изменяется суммарная жесткость упругого подвеса, что влечет за собой изменение собtoственной частоты сейсмоприемника.
Другим недостатком является сложность первоначальной настройки собственной частоты сейсмоприемника, которая производится за счет
15 изменения рабочей длины упругих элементов ирисовых пружин при помощи специальных регулировочных колец.
Наиболее близким по технической сущности к предлагаемому является
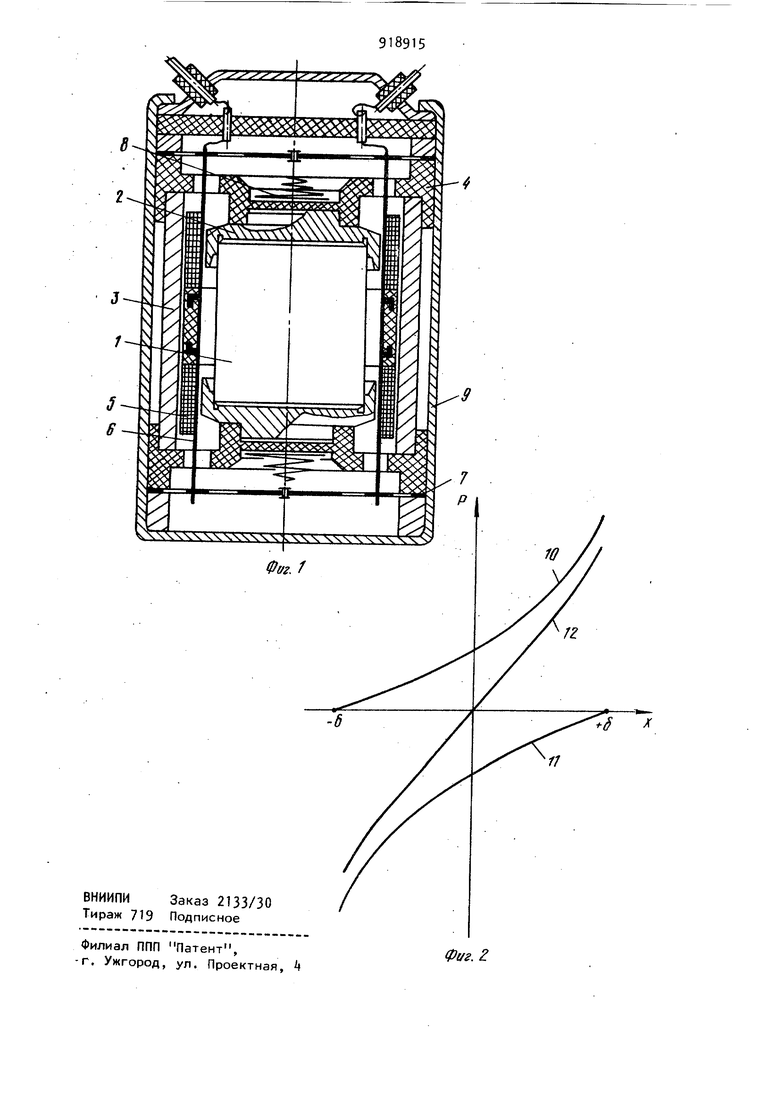
20 сейсмоприемник, содержащий корпус, магнитную систему и катушку-, размещенную в кольцевом зазоре магнитной системы и соединенную с корпусом 3 упругим подвесом. Упругий подвес состоит из ирисовых и цилиндрической пружин, а также содержит дополнительные постоянные магниты, установленные HSt корпусе и катушке и обращенные друг к другу одноименным полюсами. Магнитная система этого сейсмоприемника состоит из цилиндрического магнита с двумя полюсными наконечниками, закрепленного в приливах крышек и кольцевого магнитопр вода, закрепленного в корпусе. В кольцевом зазоре, образованном полюсными наконечниками и магнитопроводом, размещена подвижная катушка ,с двумя обмотками, соединенная с, корпусом двумя предварительно напряженными ирисовыми пружинами. Регулировка собственной частоты осуществляется дополнительной спиральной пружиной, связанной с катушкой и закрепленной с возможностью регулировки на корпусе. Линеаризация на грузочной характеристики упругого подвеса для уменьшения влияния наклона на собственную частоту сейсмо приемника достигается за счет взаим действия (отталкивания) дополнитель ных постоянных магнитов, расстояние между которыми может регулироватьЗднако независимость собствённб1й частоты от угла наклона сейсмоприем ника сохраняется только при малых углах наклона, так как компенсация нелинейности нагрузочной характерис тики упругого подвеса силами взаимо действия постоянных магнитов осуществима в узком диапазоне перемеще нии катушки и только на участке с одинаковой кривизной характеристик. Это приводит к необходимости дополнительной регулировки цилиндрическо пружины для компенсации смещения катушки при больших углах наклона сейсмоприемника, что трудно осущест вимо в реальных условиях производст ва и эксплуатации. Кроме того, наличие противополож но направленных сил от взаимодействия дополнительных магнитов между собой и от действия цилиндрической пружины, приложенных к катушке в разных точках, вызывают изгиб ирисо вых пружин, что приводит к искажени в движении катушки. Необходимость раздельной регулировки собственной частоты и линейности нагрузочной характеристики упругого подвеса затрудняет процесс настройки сейсмоприемника. Цель изобретения - повышение стабильности параметров сейсмоприемника за счет уменьшения зависимости собственной частоты сейсмоприемника от угла его установки при одновременном упрощении конструкции. . Поставленная цель достигается тем, что в электродинамическом сейсмо,приемнике, содержащем корпус, ма|- нитную систему и катушку, размещенную в кольцевом зазоре магнитной системы и соединенную с корпусом упругим подвесом, упругий подвес выполнен в виде двух спиральных фасонных пружин с квадратичной нагрузочной характеристикой, основания которых установлены на противоположных торцах магнитной системы, а вершины соединены с центрирующими шайбами, закрепленными на тех же торцах и жестко соединенными с катушкой. Соединение вершин спиральных фасонных пружин с центрирующими шайбами выполнено с возможностью осевого перемещения вершины пружины с последующей фиксацией в центрирующей шайбе, что упрощает процесс настройки собственной частоты сейсмоприемника за счет получения различной / суммарной жесткости упругого подвеса при различной осадке пружин. Симметричное расположение деталей и использование торцов магнитной системы для крепления центрирующих шайб и установки оснований пружин упрощает конструкцию и повышает технологичность сборки сейсмоприемника. На фиг. 1 показан предлагаемый сейсмоприемник, разрез; на фиг. 2 нагрузочные характеристики упругого подвеса. Магнитная система сейсмоприемника состоит из цилиндрического магнита 1, на торцах которого установлены полюсные наконечники 2, магнитопровода 3 и фланцев , при помощи которых магнит 1 с полюсными наконечниками 2 центрируется относительно магниЛэпровода 3 В кольцевом зазоре между полюсными наконечниками 2 и магнитопроводом 3 размещена подвижная катушка 5, состоящая из двух секций с противоположным направлением витков. Катушка 5 при помощи выводных стержней. 6 жестко соединена с центрирующими шайбами 7, которые в свою очередь закреплены на фланцах 4. В пространстве между центрирующими шайбами фланцами k размещены спиральные фасонные пружины 8, вершины которых выполнены в виде цилиндрического участка и соединены с центрирующими шайбами 7, например, при помощи пайки. Сейсмоприемник установлен в корпусе 9, защищающем его от повреждений. Сейсмоприемник работает следующим образом. При перемещениях (колебаниях) корпуса 9 (в направлении продольной оси) движение катушки 5 за счет инерционных свойств подвижной системы, в которую входят катушка 5 центрирующие шайбы 7 и фасонные спиральные пружины 8 отстает от движения корпуса, т.е. происходит перемещение катушки в магнитном поле, что вызывает появление ЭДС на выводах сейсмоприемника. Величина этого перемещения, и следовательно, полезного сигнала зависит от соотношения ;между частотой вынужденных колебаний корпуса S и собственной частотой колебаний подвижной системы. Частота собственных колебаний зависит от жесткости упругого подвеса (при постоянной массе подвижной системы) Изменение частоты собственных колеба ний за счет изменения жесткости упругого подвеса, имеющее место в известных сейсМоприемниках, устраняется в предлагаемом сейсмоприемнике применением спиральных фасонных пружин 8, обеспечивающих постоянную жесткость, что улучшает работу сейсмоприемника. На фиг. 2 кривая 10 соответствует характеристике верхней, а кривая 11 - характеристике нижней пружины. Суммарная нагрузочная характеристика упругого подвеса, состоящего из двух одинаковых пружин, определяется , как PV kkSx, суммарная нагрузочная харак теристика (усилие) и на фиг.2 показана кривая 12. Суммарная нагрузочная характеристика упругого подвеса, как следует из формулы и фиг.1 является линейной на участке от н-сГ до -о , т.е. обеспечивает стабильность собственно частоты независимо от положения катушки. 5.6 Жесткость упругого подвеса определяется как т.е. зависит только от параметров пружин и величины предварительной осадки, что позволяет легко подстраи вать собственную частоту сейсмоприемника за счет осевого перемещения вершины пружин. По сравнению с известными сейсмоприемниками предлагаемый сейсмоприемник позволяет уменьшить зависимость собственной частоты сейсмоприемника от угла его установки, что позволяет использовать Сейсмоприемник для приема и преобразования в электрический сигнал вертикальной, горизонтальной или произвольно направленной составляющей сейсмических волн, что приводит к унификации изделия, упростить конструкцию сейсмоприемника и повысить технологичность и уменьшить трудоемкость изготовления. Формула изобретения Электродинамический Сейсмоприемник, содержащий корпус, магнитную систему и катушку, размещенную в кольцевом зазоре магнитной системы и соединенную с корпусом упругим подвесом, отличающийся тем, что, с целью повышения стабильности параметров сейсмоприемника за счет уменьшения зависимости его собственной частоты от угла установки при одновременном упрощении конструкции, упругий подвес выполнен в виде двух спиральных фасонных пружин с квадратичной нагрузочной характеристикой, основания которых установлены на противоположных торцах магнитной системы, а вершины соединены с центрирующими шайбами, закрепленными на тех же торцах и жестко соединенными с катушкой. Источники информации, принятые во внимание при экспертизе 1.Сейсмоприемник СВ-30 ТУ 25-0 -1880-76. 2.Авторское свидетельство СССР №575592, кл. G 01 V 1/16, 197 (прототип) .
