Изобретение относится к адаптивной оптике и может быть использовано в некогерентных и когерентных оптических системах наблюдения протяженных объектов, работающих в условиях атмосферных искажений без опорного точечного источника.
Атмосферные искажения оптических сигналов приводят к ухудшению разрешающей способности систем формирования изображения. Известен ряд методов преддетекторной и последетекторной обработки сигналов в оптических системах формирования изображения, обеспечивающих повышение их разрешающей способности в условиях атмосферных искажений: "короткая" экспозиция, спекл-интерферометрия, восстановление изображений, адаптивная оптика [1, 2]. Методы адаптивной оптики обладают наиболее широкими возможностями и позволяют за счет коррекции атмосферных искажений в реальном масштабе времени получать прямые изображения с разрешением, близким к дифракционному. Основные трудности при реализации адаптивных методов возникают в случае наблюдения протяженных объектов без опорного точечного источника. В этих случаях адаптация к искажениям проводится по результатам анализа влияния пробных возмущений, вводимых в принимаемый оптический сигнал, на так называемые функции резкости, имеющие экстремальные значения в отсутствие или при компенсации действующих атмосферных искажений.
Наиболее близкой по технической сущности к заявляемому изобретению (прототипом) следует считать адаптивную систему формирования изображения [3] , схема которой приведена на фиг. 1. Цифрами обозначены: 1 - принимаемый оптический сигнал, 2 - зеркальная система, 3 - корректор волнового фронта, 4 - формирующая линзовая система, 5 - светоделитель, 6 - устройство регистрации изображения, 7 - маска, 8 - фотодетектор, 9 - формирователь управляющих сигналов.
Зеркальная система 2, корректор волнового фронта 3, формирующая линзовая система 4, светоделитель 5 и устройство регистрации изображения 6 последовательно расположены на оптической оси системы и оптически связаны между собой. С помощью светоделителя 5 выход формирующей линзовой системы 4 оптически связан через маску 7 с входом фотодетектора 8. Выход фотодетектора 8 связан с входом формирователя управляющих сигналов 9, число выходов которого равно числу управляющих входов корректора волнового фронта 3. Каждый выход формирователя управляющих сигналов 9 подключен к соответствующему управляющему входу корректора волнового фронта 3. Число входов корректора волнового фронта 3 соответствует его пространственной структуре, которая выбирается, исходя из требуемого качества коррекции искажений. Маска 7 и фотодетектор 8 установлены в плоскости, оптически сопряженной с плоскостью изображения, при этом маска (амплитудный пространственный фильтр) 7 соответствует контуру неискаженного изображения наблюдаемого объекта. Пропускание маски  принимает единичное значение в области, занимаемой неискаженным изображением наблюдаемого объекта, и нулевое - вне этой области.
принимает единичное значение в области, занимаемой неискаженным изображением наблюдаемого объекта, и нулевое - вне этой области.
Система реализует адаптивную коррекцию атмосферных искажений принимаемых оптических сигналов путем максимизации функции резкости
где  распределение интенсивности сигнала в плоскости изображения,
распределение интенсивности сигнала в плоскости изображения,  функция маски, накладываемой на изображение. Функция резкости R1 может быть использована как при некогерентной, так и при когерентной подсветке наблюдаемого объекта. Предполагается, что при когерентной подсветке вследствие шероховатости поверхности наблюдаемого протяженного объекта в системе формируется когерентное пятенное изображение, огибающая которого в среднем совпадает с формируемым при тех же условиях некогерентным изображением и несет информацию о форме объекта [4].
функция маски, накладываемой на изображение. Функция резкости R1 может быть использована как при некогерентной, так и при когерентной подсветке наблюдаемого объекта. Предполагается, что при когерентной подсветке вследствие шероховатости поверхности наблюдаемого протяженного объекта в системе формируется когерентное пятенное изображение, огибающая которого в среднем совпадает с формируемым при тех же условиях некогерентным изображением и несет информацию о форме объекта [4].
Система работает следующим образом. Принимаемый оптический сигнал 1 с атмосферными фазовыми искажениями проходит зеркальную систему 2, корректор волнового фронта 3, формирующую линзовую систему 4 и светоделитель 5. С помощью формирующей линзовой системы 4 в плоскости изображения формируется изображение наблюдаемого объекта, которое регистрируется устройством регистрации изображения 6. Для формирования сигналов управления корректором волнового фронта 3 часть энергии принимаемого сигнала 1 с помощью светоделителя 5 направляется через маску 7 на фотодетектор 8. Размер чувствительной поверхности фотодетектора 8 должен превышать размер изображения наблюдаемого объекта. Поскольку маска 7 с пропусканием  и фотодетектор 8 устанавливаются в плоскости, оптически сопряженной с плоскостью изображения, выходной сигнал фотодетектора оказывается пропорционален функции резкости R1. Он поступает на вход формирования управляющих сигналов 9, который реализует управление корректором волнового фронта 3 с временным разделением каналов по принципу экстремального регулятора.
и фотодетектор 8 устанавливаются в плоскости, оптически сопряженной с плоскостью изображения, выходной сигнал фотодетектора оказывается пропорционален функции резкости R1. Он поступает на вход формирования управляющих сигналов 9, который реализует управление корректором волнового фронта 3 с временным разделением каналов по принципу экстремального регулятора.
На каждый управляющий вход корректора волнового фронта 3 последовательно подаются управляющие напряжения, в результате чего в оптический сигнал 1 вводится соответствующий фазовый сдвиг (пробное возмущение). Если это приводит к увеличению выходного сигнала фотодетектора 8, то это управляющее напряжение остается на данном выходе формирователя управляющих сигналов 9, а если это приводит к уменьшению выходного сигнала фотодетектора 8, то знак управляющего напряжения меняется на противоположный. Пробные возмущения вводятся последовательно на все управляющие входы корректора волнового фронта 3, и для каждого анализируется величина функции резкости R1. При точном соответствии маски 7 контуру неискаженного изображения наблюдаемого объекта и расположении ее в области, соответствующей положению объекта в угловом поле системы, максимум функции резкости R1 соответствует отсутствию фазовых искажений в принимаемом сигнале 1 или их полной компенсации. Вся настройка осуществляется в течение времени "замороженности" искажений, что обеспечивается соответствующим выбором быстродействия формирователя управляющих сигналов 9.
Таким образом, в системе осуществляется косвенное измерение фазовых искажений, в результате чего в принимаемый оптический сигнал 1 вводятся корректирующие воздействие, и устройство регистрации изображения 6 регистрирует изображение наблюдаемого объекта с улучшенной разрешающей способностью. Источник подсветки наблюдаемого объекта (некогерентный или когерентный) на фиг. 1 не показан, поскольку адаптивная система формирования изображения работает от него независимо.
Недостатком известного устройства является узкая область его применения - ограниченный класс объектов, которые могут наблюдаться с улучшенной разрешающей способностью. Это связано с тем, что для осуществления процесса адаптации требуется априорная информация о контуре наблюдаемого объекта и его положении в угловом поле системы. Данное ограничение является весьма существенным, так как в большинстве случаев наблюдения за реальными объектами имеет место зона неопределенности их положения в угловом поле оптической системы, превышающая угловые размеры объекта, а также априорная неопределенность о форме или ракурсе наблюдаемого объекта. Это характерно, например, для наблюдения за летательными аппаратами. А если вследствие априорной неопределенности функция пропускания маски отличается от контура наблюдаемого объекта или имеют место ошибки ее установки относительно изображения объекта, то косвенное измерение и коррекция фазовых искажений принимаемых сигналов становятся невозможны.
Целью изобретения является расширение области применения адаптивной системы формирования изображения, в частности, снятие требований о наличии априорной информации о контуре и угловом положении наблюдаемого объекта в угловом поле системы.
Цель достигнута тем, что в адаптивную систему формирования изображения, содержащую последовательно расположенные и оптически связанные зеркальную систему, корректор волнового фронта, первую формирующую линзовую систему, первый светоделитель и устройство регистрации изображения, оптически связанные со вторым оптическим выходом первого светоделителя и последовательно расположенные первую маску, соответствующую контуру неискаженного изображения наблюдаемого объекта, и фотодетектор, а также формирователь управляющих сигналов, вход которого подключен к выходу фотодетектора, а выходы подключены к соответствующим управляющим входам корректора волнового фронта, введены последовательно расположенные и оптически связанные второй светоделитель, усилитель яркости изображения и вторая формирующая линзовая система, последовательно расположенные и оптически связанные со вторым оптическим выходом второго светоделителя вторая маска и матричный фотодетектор с кадровой разверткой и логарифмической световой чувствительностью элементов матрицы, а также интегратор и имеющие по два входа сумматор и переключатель, при этом оптический вход второго светоделителя оптически связан со вторым оптическим выходом первого светоделителя, выход второй формирующей линзовой системы через первую маску оптически связан с фотодетектором, выход которого подключен к первым входам сумматора и переключателя, к выходу матричного фотодетектора подключен интегратор, выход интегратора подключен ко второму входу сумматора, выход сумматора подключен ко второму входу переключателя, выход переключателя подключен ко входу формирователя управляющих сигналов, к которому подключены управляющие входы матричного фотодетектора и интегратора, первая маска выполнена соответствующей области существенных значений оптического Фурье-спектра неискаженного изображения наблюдаемого объекта, вторая маска выполнена соответствующей области, неопределенности положения наблюдаемого объекта в угловом поле системы, размер элементов матричного фотодетектора соответствует размеру элемента разрешения системы, второй светоделитель установлен с возможностью ввода и вывода из оптической схемы так, что при выводе его из оптической схемы второй оптический выход первого светоделителя связан только с входом усилителя яркости изображения.
Благодаря введенным элементам и связям в адаптивной системе формирования изображения косвенное измерение фазовых искажений принимаемых сигналов осуществляется путем максимизации функции резкости
или функции резкости.

где  - модуль пространственного спектра формируемого изображения,
- модуль пространственного спектра формируемого изображения,  функция маски в области пространственных частот,
функция маски в области пространственных частот,  распределение интенсивности сигнала в плоскости изображения,
распределение интенсивности сигнала в плоскости изображения,  функция маски, накладываемой на изображение, α - весовой коэффициент, имеющий смысл множителя Лагранжа. Функция резкости R2 используется при некогерентной подсветке и формировании некогерентных изображений наблюдаемых объектов, а функция резкости R3 используется при когерентной подсветке и формировании когерентных пятенных изображений наблюдаемых протяженных объектов.
функция маски, накладываемой на изображение, α - весовой коэффициент, имеющий смысл множителя Лагранжа. Функция резкости R2 используется при некогерентной подсветке и формировании некогерентных изображений наблюдаемых объектов, а функция резкости R3 используется при когерентной подсветке и формировании когерентных пятенных изображений наблюдаемых протяженных объектов.
Физический смысл компенсации фазовых искажений при максимизации функций резкости R2 и R3 заключается в том, что фазовые искажения принимаемого сигнала всегда приводят к уменьшению составляющих модуля пространственного спектра некогерентных изображений и огибающей когерентных пятенных изображений [4] . Поэтому максимизация функции резкости R2 и первого слагаемого в выражении для функции резкости R3 соответствует компенсации действующих фазовых искажений и формированию неискаженного изображения. Для этого функция маски  должна принимать единичное значение в области существенных значений пространственного спектра неискаженного некогерентного изображения наблюдаемого объекта, с которым в среднем совпадает огибающая формируемого при тех же условиях когерентного пятенного изображения, а нулевое - вне этой области. Второе слагаемое в выражении для функции резкости R3 вводится для предотвращения эффекта стягивания когерентных пятенных изображений протяженных объектов в один спекл (пятно) в процессе адаптации. При стягивании изображения в один спекл происходит уменьшение его энтропии, которую выражает логарифмическая функция от
должна принимать единичное значение в области существенных значений пространственного спектра неискаженного некогерентного изображения наблюдаемого объекта, с которым в среднем совпадает огибающая формируемого при тех же условиях когерентного пятенного изображения, а нулевое - вне этой области. Второе слагаемое в выражении для функции резкости R3 вводится для предотвращения эффекта стягивания когерентных пятенных изображений протяженных объектов в один спекл (пятно) в процессе адаптации. При стягивании изображения в один спекл происходит уменьшение его энтропии, которую выражает логарифмическая функция от  [5]. Для обеспечения неотрицательности значений второго слагаемого аргументу логарифмической функции прибавляется единица. Тогда при соответствующем выборе весового коэффициента α второе слагаемое, уменьшаясь, будет препятствовать стягиванию когерентного пятенного изображения в один спекл при максимизации функции резкости R3. Функция маски
[5]. Для обеспечения неотрицательности значений второго слагаемого аргументу логарифмической функции прибавляется единица. Тогда при соответствующем выборе весового коэффициента α второе слагаемое, уменьшаясь, будет препятствовать стягиванию когерентного пятенного изображения в один спекл при максимизации функции резкости R3. Функция маски  принимает единичное значение в области, соответствующей области неопределенности положения наблюдаемого объекта в угловом поле системы, и нулевое - вне этой области. В силу энтропийных свойств когерентных пятенных изображений (а именно - энтропия одного пятна всегда меньше энтропии нескольких пятен при той же суммарной энергии изображения) формирование второго слагаемого функции резкости R3 может происходить и без функции маски
принимает единичное значение в области, соответствующей области неопределенности положения наблюдаемого объекта в угловом поле системы, и нулевое - вне этой области. В силу энтропийных свойств когерентных пятенных изображений (а именно - энтропия одного пятна всегда меньше энтропии нескольких пятен при той же суммарной энергии изображения) формирование второго слагаемого функции резкости R3 может происходить и без функции маски  В данном случае она используется для пространственной фильтрации возможных источников помех, находящихся вне области неопределенности углового положения наблюдаемого объекта, но попадающих в угловое поле оптической системы, к влиянию которых критичны алгоритмы адаптации с вычислением функции резкости по распределению интенсивности в плоскости изображения.
В данном случае она используется для пространственной фильтрации возможных источников помех, находящихся вне области неопределенности углового положения наблюдаемого объекта, но попадающих в угловое поле оптической системы, к влиянию которых критичны алгоритмы адаптации с вычислением функции резкости по распределению интенсивности в плоскости изображения.
Характер влияния фазовых искажений принимаемого сигнала на модуль пространственного спектра некогерентных изображений и огибающей когерентных пятенных изображений позволяет использовать функции резкости R2 и R3, не имея точной априорной информации о форме наблюдаемого объекта и его положении в угловом поле оптической системы. Необходимой априорной информацией о наблюдаемом объекте является информация о размерах области существенных значений пространственного спектра неискаженного некогерентного изображения наблюдаемого объекта.
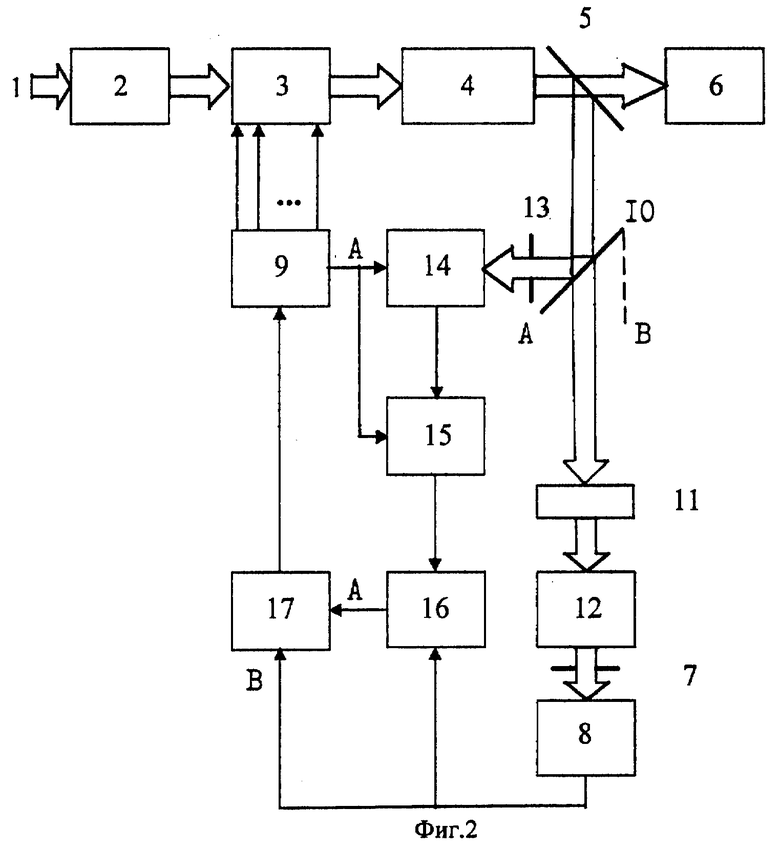
На фиг. 2 приведена схема предлагаемой адаптивной системы формирования изображения. Цифрами обозначены: 1 - принимаемый оптический сигнал, 2 - зеркальная система, 3 - корректор волнового фронта, 4 - первая формирующая линзовая система, 5 - первый светоделитель, 6 - устройство регистрации изображения, 7 - первая маска, 8 - фотодетектор, 9 - формирователь управляющих сигналов, 10 - второй светоделитель, 11 - усилитель яркости изображения, 12 - вторая формирующая линзовая система, 13 - вторая маска, 14 - матричный фотоприемник с кадровой разверткой и логарифмической световой чувствительностью элементов матрицы, 15 - интегратор, 16 - сумматор с двумя входами, 17 - переключатель с двумя входами.
Зеркальная система 2, корректор волнового фронта 3, первая формирующая линзовая система 4, первый светоделитель 5 и устройство регистрации изображения 6 последовательно расположены на оптической оси системы и оптически связаны между собой. Второй светоделитель 10 устанавливается с возможностью ввода (положение A) и вывода (положение B) из оптической схемы системы. Если второй светоделитель 10 находится в положении A, то он оптически связан со вторым оптическим выходом первого светоделителя 5 и расположен на одной оптической оси с последовательно установленными и оптически связанными усилителем яркости изображения 11, второй формирующей линзовой системой 12, первой маской 7 и фотодетектором 8. Второй оптический выход второго светоделителя 10 при этом оптически связан через вторую маску 13 с входом матричного фотодетектора 14. Если второй светоделитель 10 находится в положении B, то второй оптический выход первого светоделителя 5 оптически связан только со входом усилителя яркости изображения 11. Выход фотодетектора 8 подключен к первым входам сумматора 16 и переключателя 17 (вход B). Выход матричного фотодетектора 14 через интегратор 15 подключен ко второму входу сумматора 16. Выход сумматора 16 подключен ко второму входу переключателя 17 (вход A). Выход переключателя 17 подключен к входу формирователя управляющих сигналов 9, число выходов которых равно числу управляющих входов корректора волнового фронта 3. Каждый выход формирователя управляющих сигналов 9 подключен к соответствующему управляющему входу корректора волнового фронта 3, кроме того, к формирователю управляющих сигналов 9 подключены управляющие входы матричного детектора 14 и интегратора 15. Число входов корректора волнового фронта 3 соответствует его пространственной структуре, которая выбирается, исходя из требуемого качества коррекции искажений.
Усилитель яркости изображения 11 и матричный фотодетектор 14 установлены в плоскостях, оптически сопряженных с плоскостью изображения. Расстояние между усилителем яркости изображения 11, второй формирующей линзовой системой 12 и фотодетектором 8 выбраны таким образом, чтобы в плоскости фотодетектора 8 формировался оптический Фурье-спектр изображения наблюдаемого объекта на выходе (экране) усилителя яркости изображения 11. Первая маска 7 расположена в плоскости фотодетектора 8, а вторая маска 13 - в плоскости матричного фотодетектора 14. Они выполняют функцию пространственной фильтрации модуля пространственного спектра формируемого изображения и изображения соответственно. Первая маска 7 соответствует области существенных значений оптического Фурье-спектра неискаженного когерентного изображения наблюдаемого объекта. Ее пропускание  принимает единичное значение в области, где сосредоточены существенные значения оптического Фурье-спектра неискаженного некогерентного изображения наблюдаемого объекта, и нулевое - вне этой области. Вторая маска 13 соответствует области неопределенности положения наблюдаемого объекта в угловом поле системы. Ее пропускание
принимает единичное значение в области, где сосредоточены существенные значения оптического Фурье-спектра неискаженного некогерентного изображения наблюдаемого объекта, и нулевое - вне этой области. Вторая маска 13 соответствует области неопределенности положения наблюдаемого объекта в угловом поле системы. Ее пропускание  принимает единичное значение в области, соответствующей области неопределенности положения наблюдаемого объекта и нулевое - вне этой области. Матричный фотодетектор 14 имеет кадровую развертку и логарифмическую световую чувствительность элементов. Размер элементов матричного фотодетектора 14 соответствует размеру элемента разрешения системы. Управляющий вход матричного фотодетектора 14 служит для запуска развертки одного кадра. Управляющий вход интегратора 15 служит для его обнуления.
принимает единичное значение в области, соответствующей области неопределенности положения наблюдаемого объекта и нулевое - вне этой области. Матричный фотодетектор 14 имеет кадровую развертку и логарифмическую световую чувствительность элементов. Размер элементов матричного фотодетектора 14 соответствует размеру элемента разрешения системы. Управляющий вход матричного фотодетектора 14 служит для запуска развертки одного кадра. Управляющий вход интегратора 15 служит для его обнуления.
Система работает следующим образом. Принимаемый оптический сигнал 1 с атмосферными фазовыми искажениями проходит зеркальную систему 2, корректор волнового фронта 3, первую формирующую линзовую систему 4 и светоделитель 5. С помощью формирующей линзовой системы 4 в плоскости изображения формируется изображение наблюдаемого объекта, которое регистрируется устройством регистрации изображения 6. Для формирования сигналов управления корректором волнового фронта 3 часть энергии принимаемого сигнала 1 с помощью первого светоделителя 5 направляется на второй светоделитель 10, который установлен с возможностью ввода и вывода из оптической схемы. Если второй светоделитель введен в оптическую схему (положение A), то он разделяет оптический сигнал на две части, одну из них направляя на усилитель яркости изображения 11, а другую - через маску 13 - на матричный фотодетектор 14. Если второй светоделитель выведен из оптической схемы (положение B), то оптический сигнал со второго выхода первого светоделителя 5 поступает только на усилитель яркости изображения 11. Положение второго светоделителя 10 выбирается перед началом работы системы. Положение A соответствует максимизации функции резкости R3 и используется при формировании когерентных пятенных изображений с когерентной подсветкой. Положение В соответствует максимизации функции резкости R2 и используется при формировании некогерентных изображений с некогерентной подсветкой. Полагается, что уровень принимаемого сигнала 1 достаточен как для регистрации изображения устройством регистрации изображения 6, так и для вычисления функций резкости R2 или R3.
Усилитель яркости изображения 11 установлен в плоскости, оптически сопряженной с плоскостью изображения. В качестве усилителя яркости изображения 11 может быть использован микроканальный усилитель яркости, используемый в высокочувствительных системах регистрации изображений [6]. Изображение наблюдаемого объекта формируется на входе (катоде) усилителя яркости изображения 11, в результате чего на его выходе (экране) формируется соответствующее распределение яркости, которое может быть обработано с помощью преобразований в области пространственных частот. С помощью второй формирующей линзовой системы 12 в плоскости фотодетектора 8 формируется оптический Фурье-спектр изображения наблюдаемого объекта, из которого с помощью установленной непосредственно перед фотодетектором 8 маски 7 с пропусканием  выделяется составляющие, необходимые для вычисления функции резкости R2 и первого слагаемого в выражении для функции резкости R3. Размер чувствительной поверхности второго фотодетектора 8 при этом должен быть не менее размера области значений оптического Фурье-спектра, пропускаемых маской 7. В результате на выходе фотодетектора 8 формируется сигнал, пропорциональный функции резкости R2 и первому слагаемому в выражении для функции резкости R3. Размер чувствительной поверхности фотодетектора 8 при этом должен быть не менее размера области значений оптического Фурье-спектра, пропускаемых маской 7. В результате на выходе фотодетектора 8 формируется сигнал, пропорциональный функции резкости R2 и первому слагаемому в выражении для функции резкости R3. Этот сигнал поступает на первые входы сумматора 16 и коммутатора 17.
выделяется составляющие, необходимые для вычисления функции резкости R2 и первого слагаемого в выражении для функции резкости R3. Размер чувствительной поверхности второго фотодетектора 8 при этом должен быть не менее размера области значений оптического Фурье-спектра, пропускаемых маской 7. В результате на выходе фотодетектора 8 формируется сигнал, пропорциональный функции резкости R2 и первому слагаемому в выражении для функции резкости R3. Размер чувствительной поверхности фотодетектора 8 при этом должен быть не менее размера области значений оптического Фурье-спектра, пропускаемых маской 7. В результате на выходе фотодетектора 8 формируется сигнал, пропорциональный функции резкости R2 и первому слагаемому в выражении для функции резкости R3. Этот сигнал поступает на первые входы сумматора 16 и коммутатора 17.
Матричный фотоприемник 14 с логарифмической чувствительностью и кадровой разверткой установлен в плоскости, оптически сопряженной с плоскостью изображения. В качестве матричного фотоприемника 14 может быть использована фотодиодная матрица с последовательным опросом, у которой фотодиоды работают в фотогальваническом режиме. В этом режиме выходное напряжение фотодиода зависит от падающего потока излучения по логарифмическому закону [6], повторяя зависимость подынтегрального выражения во втором слагаемом выражения для функции резкости R3 от интенсивности сигнала  Другим вариантом реализации логарифмической световой чувствительности матричного фотодетектора 14, не ограничивающим заявляемое техническое решение, является использование специальных светочувствительных сред и покрытий [5]. Элементы матричного фотодетектора 14 регистрируют значения логарифма интенсивности сигнала в плоскости изображения с дискретностью, соответствующей размеру элемента разрешения системы. По сигналу от устройства формирования управляющих сигналов 9 вместе с введением на корректоре волнового фронта 3 очередного пробного возмущения запускается однократная кадровая развертка (опрос элементов) матричного фотоприемника 14 и обнуляется интегратор 15. Тогда после окончания однократной кадровой развертки на выходе интегратора 15 формируется сигнал, пропорциональный второму слагаемому в выражении для функции резкости R3. Практически вместо интеграла вычисляется сумма, однако размер элемента матричного фотоприемника соответствует размеру элемента разрешения системы, с которым совпадает средний размер пятна (спекла) в когерентном пятенном изображении [4] , и такая дискретность достаточна для вычисления второго слагаемого функции резкости R3, предотвращающего стягивание изображения в один спекл в процессе адаптации. Выходной сигнал интегратора 15 поступает на второй вход сумматора 16, где складывается с выходным сигналом фотодетектора 8. В результате выходной сигнал сумматора 16 пропорционален функции резкости R3. Величина весового коэффициента α определяется соотношением коэффициентов усиления первого фотодетектора 8 и интегратора 15. Маска 13, установленная непосредственно перед матричным фотодетектором имеет пропускание
Другим вариантом реализации логарифмической световой чувствительности матричного фотодетектора 14, не ограничивающим заявляемое техническое решение, является использование специальных светочувствительных сред и покрытий [5]. Элементы матричного фотодетектора 14 регистрируют значения логарифма интенсивности сигнала в плоскости изображения с дискретностью, соответствующей размеру элемента разрешения системы. По сигналу от устройства формирования управляющих сигналов 9 вместе с введением на корректоре волнового фронта 3 очередного пробного возмущения запускается однократная кадровая развертка (опрос элементов) матричного фотоприемника 14 и обнуляется интегратор 15. Тогда после окончания однократной кадровой развертки на выходе интегратора 15 формируется сигнал, пропорциональный второму слагаемому в выражении для функции резкости R3. Практически вместо интеграла вычисляется сумма, однако размер элемента матричного фотоприемника соответствует размеру элемента разрешения системы, с которым совпадает средний размер пятна (спекла) в когерентном пятенном изображении [4] , и такая дискретность достаточна для вычисления второго слагаемого функции резкости R3, предотвращающего стягивание изображения в один спекл в процессе адаптации. Выходной сигнал интегратора 15 поступает на второй вход сумматора 16, где складывается с выходным сигналом фотодетектора 8. В результате выходной сигнал сумматора 16 пропорционален функции резкости R3. Величина весового коэффициента α определяется соотношением коэффициентов усиления первого фотодетектора 8 и интегратора 15. Маска 13, установленная непосредственно перед матричным фотодетектором имеет пропускание  и осуществляет пространственную фильтрацию излучения источников помех, находящихся в пределах углового поля системы, но вне области неопределенности положения наблюдаемого объекта. Размер матричного приемника 14 должен быть не менее размера области неопределенности положения наблюдаемого объекта. Опрос элементов матричного фотоприемника 14 и интегрирование его выходного сигнала интегратором 15 осуществляется при введении каждого пробного возмущения, что согласуется с последовательным введением пробных возмущений на корректоре волнового фронта 3 с помощью формирователя управляющих сигналов 9.
и осуществляет пространственную фильтрацию излучения источников помех, находящихся в пределах углового поля системы, но вне области неопределенности положения наблюдаемого объекта. Размер матричного приемника 14 должен быть не менее размера области неопределенности положения наблюдаемого объекта. Опрос элементов матричного фотоприемника 14 и интегрирование его выходного сигнала интегратором 15 осуществляется при введении каждого пробного возмущения, что согласуется с последовательным введением пробных возмущений на корректоре волнового фронта 3 с помощью формирователя управляющих сигналов 9.
Положение переключателя 17, также как и положение второго светоделителя 10, выбирается перед началом работы. Если формируются когерентные пятенные изображения, то переключатель 17 подключает ко входу формирователя управляющих сигналов 9 вход A - выходной сигнал сумматора 16, пропорциональный величине функции резкости R3. При коррекции фазовых искажений принимаемого сигнала 1 выходной сигнал фотодетектора 8 тем выше, чем меньше действующие фазовые искажения, а выходной сигнал интегратора 15 (после завершения опроса элементов матричного фотоприемника 14) уменьшается при стягивании изображения в яркий спекл, сохраняя тем самым достигнутое качество изображения. Если формируется некогерентное изображение, то переключатель 17 подключает ко входу формирователя управляющих сигналов 9 вход B - выходной сигнал фотодетектора 7, пропорциональный величине функции резкости R2. В этом случае при коррекции фазовых искажений принимаемого сигнала 1 выходной сигнал фотодетектора 8 тем выше, чем меньше действующие искажения, а предотвращать стягивание изображения в один спекл не требуется. При этом на вход матричного фотодетектора 14 оптический сигнал не подается, поскольку второй светоделитель находится в положении B. Таким образом, управляющие сигналы от формирователя управляющих сигналов 9 необходимы для работы матричного фотоприемника 14 и интегратора 15 только тогда, когда второй светоделитель 10 находится в положении A и коммутатор 17 подключает вход A к формирователю управляющих сигналов 9. Выходной сигнал переключателя 17, пропорциональный функции резкости R2 или R3, поступает на вход формирователя управляющих сигналов 9.
Схема и принцип действия формирователя управляющих сигналов 9 полностью идентичны формирователю управляющих сигналов 9 прототипа [3]. Он работает по принципу экстремального регулятора и реализует управление корректором волнового фронта 3 с временным разделением каналов. На каждый вход корректора волнового фронта 3 последовательно подаются управляющие напряжения, в результате чего в принимаемый сигнал 1 вводятся соответствующие фазовые сдвиги (пробные возмущения). Если это приводит к увеличению входного сигнала формирователя управляющих сигналов 9, то это управляющее напряжение сохраняется на данном управляющем входе корректора волнового фронта 3, а если это приводит к уменьшению входного сигнала формирователя управляющих сигналов 9, то знак управляющего напряжения меняется на противоположный. Пробные возмущения вводятся последовательно на все управляющие входы корректора волнового фронта 3, а для каждого анализируется функция резкости R2 или R3. Максимальные значения функций резкости R2 и R3 соответствуют отсутствию фазовых искажений или их полной компенсации. Вся настройка осуществляется в течение времени "замороженности" искажений, что обеспечивается выбором быстродействия формирователя управляющих сигналов 9, а также схемы кадровой развертки матричного фотодетектора 14 и интегратора 15. При этом независимость функций резкости R2 и R3 от положения объекта в угловом поле зрения системы накладывает ограничение на время регистрации изображения - оно должно соответствовать времени "короткой" экспозиции, чтобы не происходил смаз изображения при флуктуациях общего наклона волнового фронта. Источник подсветки наблюдаемого объекта (некогерентный или когерентный) на фиг. 2 не показан, поскольку адаптивная система работает от него независимо. В результате максимизации функции резкости R2 или R3 устройство регистрации изображения 6 регистрирует изображение со скомпенсированными атмосферными искажениями.
Технико-экономическим преимуществом предлагаемой адаптивной системы формирования изображений является расширение области ее применения за счет уменьшения требуемой априорной информации о наблюдаемом объекте. Для обеспечения работоспособности известного устройства требуется знание контура наблюдаемого объекта и его положения в угловом поле оптической системы, которым должно в точности соответствовать пропускание маски  Это существенно ограничивает возможности его применения во всех случаях, когда имеет место априорная неопределенность о форме наблюдаемого объекта и его положении в угловом поле оптической системы. Увеличение же размеров области пропускания маски
Это существенно ограничивает возможности его применения во всех случаях, когда имеет место априорная неопределенность о форме наблюдаемого объекта и его положении в угловом поле оптической системы. Увеличение же размеров области пропускания маски  приводит к невозможности косвенного измерения действующих фазовых искажений по функции резкости R1. В предлагаемом устройстве требуется лишь априорная информация о ширине пространственного спектра неискаженного некогерентного изображения наблюдаемого объекта, исходя из которой выбирается пропускание маски
приводит к невозможности косвенного измерения действующих фазовых искажений по функции резкости R1. В предлагаемом устройстве требуется лишь априорная информация о ширине пространственного спектра неискаженного некогерентного изображения наблюдаемого объекта, исходя из которой выбирается пропускание маски  и информация о зоне неопределенности положения объекта в угловом поле системы, исходя из которой выбирается пропускание маски
и информация о зоне неопределенности положения объекта в угловом поле системы, исходя из которой выбирается пропускание маски  Кроме того, функции резкости R2 и R3 не зависят от углового положения наблюдаемого объекта в поле зрения системы. Благодаря этому косвенное измерение фазовых искажений и их коррекция становятся возможны без использования априорной информации о контуре и точном положении объекта в угловом поле системы. Что же касается априорной информации об области существенных значений пространственного спектра неискаженного изображения, то на практике такая информация имеется гораздо чаще, чем точная информация о контуре наблюдаемого объекта [7]. Таким образом, за счет введения новых элементов и связей в предлагаемом устройстве достигается положительный эффект по сравнению с известным: уменьшается объем требуемой априорной информации о наблюдаемом объекте и тем самым расширяется область применения.
Кроме того, функции резкости R2 и R3 не зависят от углового положения наблюдаемого объекта в поле зрения системы. Благодаря этому косвенное измерение фазовых искажений и их коррекция становятся возможны без использования априорной информации о контуре и точном положении объекта в угловом поле системы. Что же касается априорной информации об области существенных значений пространственного спектра неискаженного изображения, то на практике такая информация имеется гораздо чаще, чем точная информация о контуре наблюдаемого объекта [7]. Таким образом, за счет введения новых элементов и связей в предлагаемом устройстве достигается положительный эффект по сравнению с известным: уменьшается объем требуемой априорной информации о наблюдаемом объекте и тем самым расширяется область применения.
Источники информации:
1. Адаптивная оптика. Сборник статей: Пер. с англ. - М.: Мир, 1980. - С. 116-133, 304-331, 379-385.
2. Устинов Н. Д., Матвеев И.Н., Протопопов В.В. Методы обработки оптических полей в лазерной локации. - М.: Наука, 1983. - С. 205-213, 238-245.
3. Троицкий И.Н., Сафронов А.Н. Адаптивная оптика М.: Знание, 1989. - С. 28-40 (прототип).
4. Матвеев И.Н., Протопопов В.В., Троицкий И.Н., Устинов Н.Д. Лазерная локация. - М.: Машиностроение, 1984. - С. 62-65, 81-85.
5. Лукьянов Д.П., Корниенко А.А., Рудницкий Б.Е. Оптические адаптивные системы. - М.: Радио и связь, 1989. - С. 25- 26, 194-195.
6. Ишанин Г. Г., Панков Э.Д., Андреев А.А., Польщиков Г.В. Источники и приемники излучения. - СПб.: Политехника, 1991. - С. 116-117, 164-166.
7. Василенко Г.И., Тараторин А.М. Восстановление изображений. -М.: Радио и связь, 1986. - С. 119 - 122.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 1999 |
|
RU2149516C1 |
| АДАПТИВНЫЙ ТЕЛЕСКОП | 1991 |
|
RU2020522C1 |
| АДАПТИВНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 1991 |
|
RU2101875C1 |
| АЭРОФОТОАППАРАТ | 2000 |
|
RU2180449C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЭКСПОЗИЦИИ | 2000 |
|
RU2172976C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170437C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДЕЙСТВИЙ И СОСТОЯНИЯ НАБЛЮДАЕМОГО ЧЕЛОВЕКА | 2000 |
|
RU2197309C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2172517C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192662C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2001 |
|
RU2206123C2 |
Система содержит последовательно расположенные зеркальную систему, корректор волнового фронта, первую формирующую линзовую систему, первый светоделитель и устройство регистрации изображения. Второй оптический выход первого светоделителя связан с оптическим входом второго светоделителя и последовательно расположенными усилителем яркости изображения и второй формирующей линзовой системой. Выход второй формирующей линзовой системы через первую маску оптически связан с фотодетектором, выход которого подключен к первым входам сумматора и переключателя. Со вторым выходом второго светоделителя оптически связаны вторая маска и матричный фотодетектор, к выходу которого последовательно подключены интегратор, сумматор и переключатель, выход которого подключен ко входу формирователя управляющих сигналов, подключенного к соответствующим управляющим входам корректора волнового фронта. Первая маска соответствует области существенных значений оптического Фурье-спектра неискаженного изображения наблюдаемого объекта. Вторая маска соответствует области неопределенности положения наблюдаемого объекта в угловом поле системы. Второй светоделитель установлен с возможностью ввода и вывода из оптической системы. Обеспечивается расширение области применения адаптивной системы, так как не требуется априорная информация о контуре и угловом положении наблюдаемого объекта в угловом поле системы. 2 ил.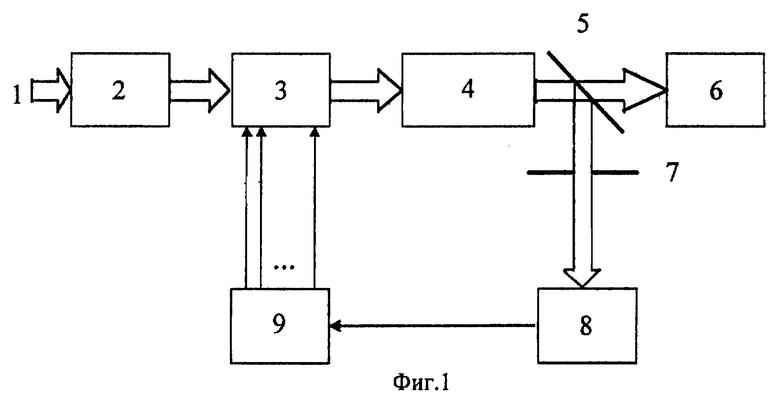
Адаптивная система формирования изображения, содержащая последовательно расположенные и оптически связанные зеркальную систему, корректор волнового фронта, первую формирующую линзовую систему, первый светоделитель и устройство регистрации изображения, последовательно расположенные первую маску и фотодетектор, а также формирователь управляющих сигналов, выходы которого подключены к соответствующим управляющим входам корректора волнового фронта, отличающаяся тем, что введены последовательно расположенные и оптически связанные второй светоделитель, усилитель яркости изображения и вторая формирующая линзовая система, последовательно расположенные и оптически связанные со вторым оптическим выходом второго светоделителя вторая маска и матричный фотодетектор с кадровой разверткой и логарифмической световой чувствительностью элементов матрицы, а также интегратор и имеющие по два входа сумматор и переключатель, при этом оптический вход второго светоделителя оптически связан со вторым оптическим выходом первого светоделителя, выход второй формирующей линзовой системы через первую маску оптически связан с фотодетектором, выход которого подключен к первым входам сумматора и переключателя, к выходу матричного фотодетектора подключен интегратор, выход интегратора подключен ко второму входу сумматора, выход сумматора подключен ко второму входу переключателя, выход переключателя подключен ко входу формирователя управляющих сигналов, к которому подключены управляющие входы матричного фотодетектора и интегратора, первая маска выполнена соответствующей области существенных значений оптического Фурье-спектра не искаженного изображения наблюдаемого объекта, вторая маска выполнена соответствующей области неопределенности положения наблюдаемого объекта в угловом поле системы, размер элементов матричного фотодетектора соответствует размеру элемента разрешения системы, второй светоделитель установлен с возможностью ввода и вывода из оптической схемы так, что при выводе его из оптической схемы второй оптический выход первого светоделителя связан с входом усилителя яркости изображения.
| Троицкий И.Н., Сафронов А.Н | |||
| Адаптивная оптика | |||
| - М.: Знание, 1989, с.28 - 40 | |||
| Адаптивная оптическая система фокусировки | 1990 |
|
SU1712934A1 |
| Способ фазовой коррекции светового излучения в линейной адаптивной оптической системе | 1989 |
|
SU1753443A1 |
| US 4453804 А, 12.06.1984 | |||
| US 5724447 А, 03.03.1998 | |||
| АДАПТИВНЫЙ ОПТИЧЕСКИЙ МОДУЛЬ | 1996 |
|
RU2084941C1 |
