Изобретение относится к области демпфирования колебаний упругих элементов объектов, может быть использовано при проектировании и создании перспективных систем управления объектами нежесткой конструкции и является усовершенствованием изобретения по авторскому свидетельству 1500990 [1].
Целью изобретения является повышение быстродействия устройства.
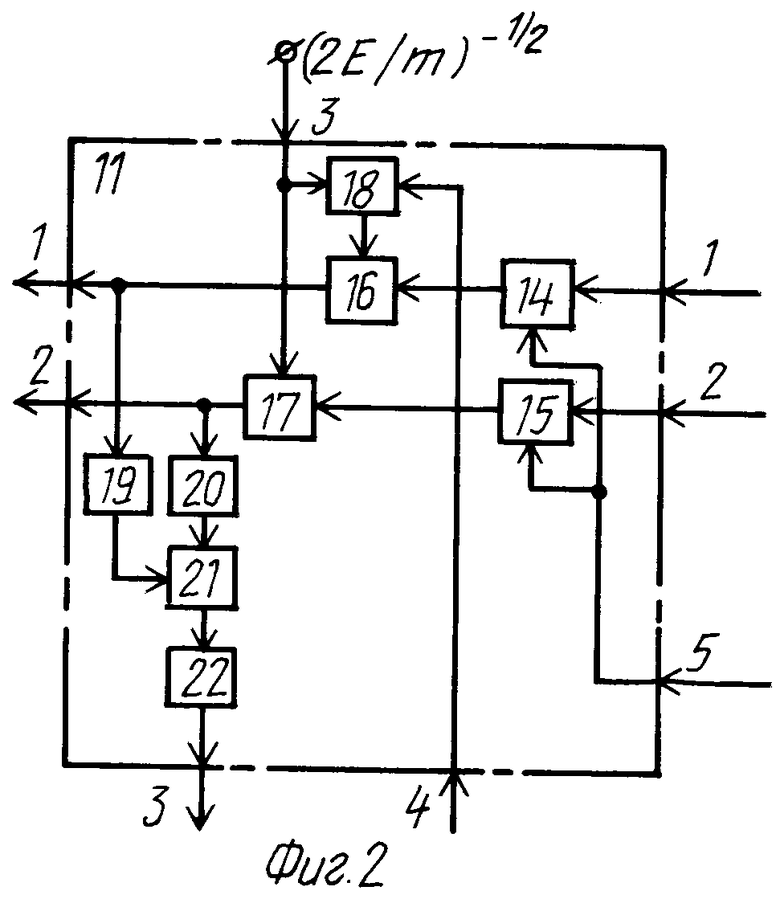
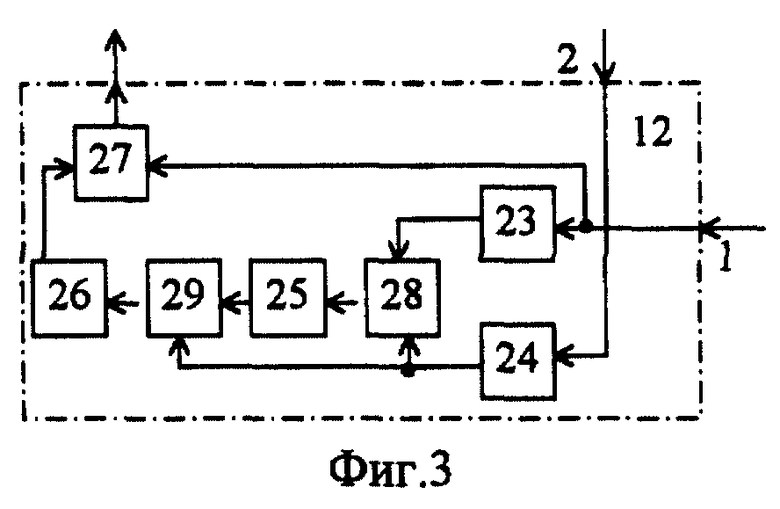
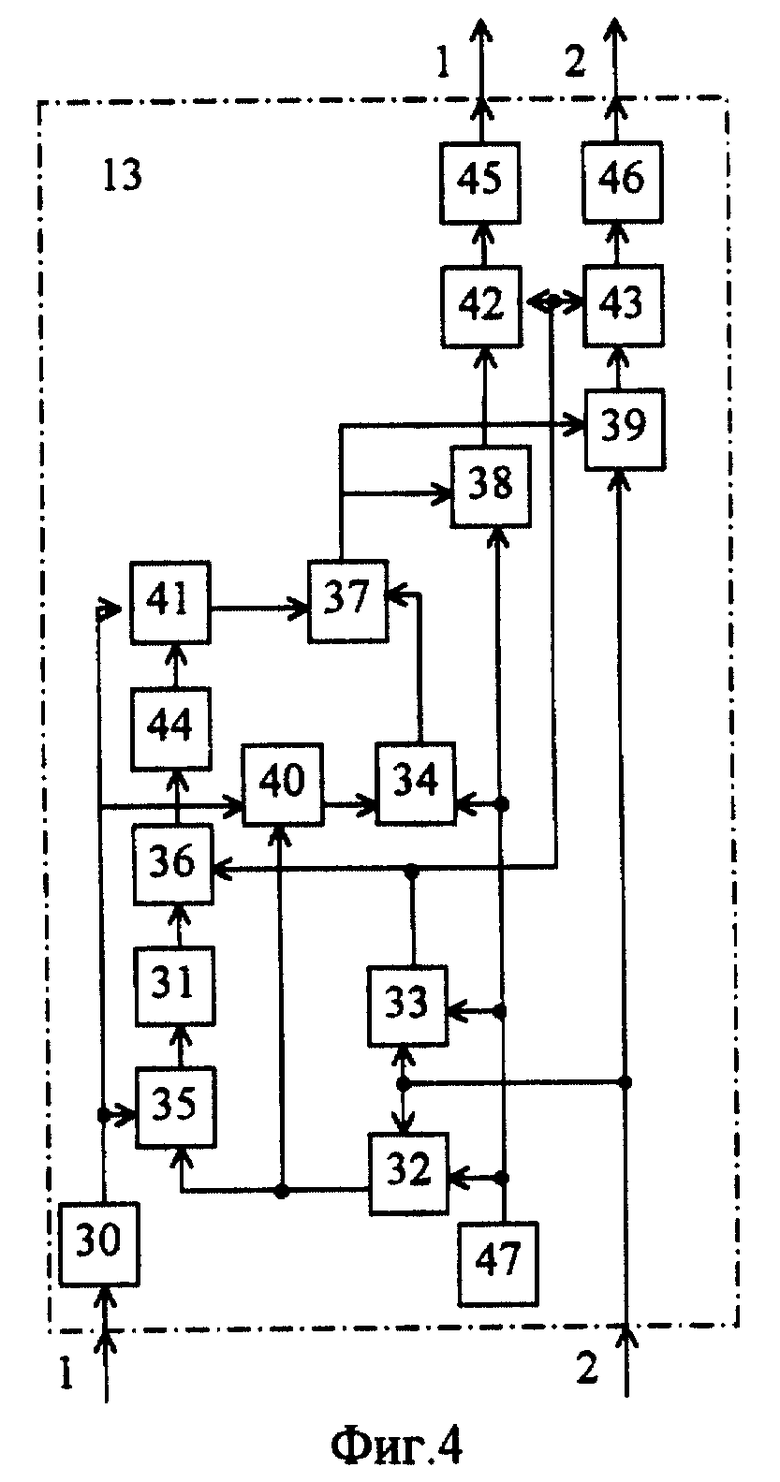
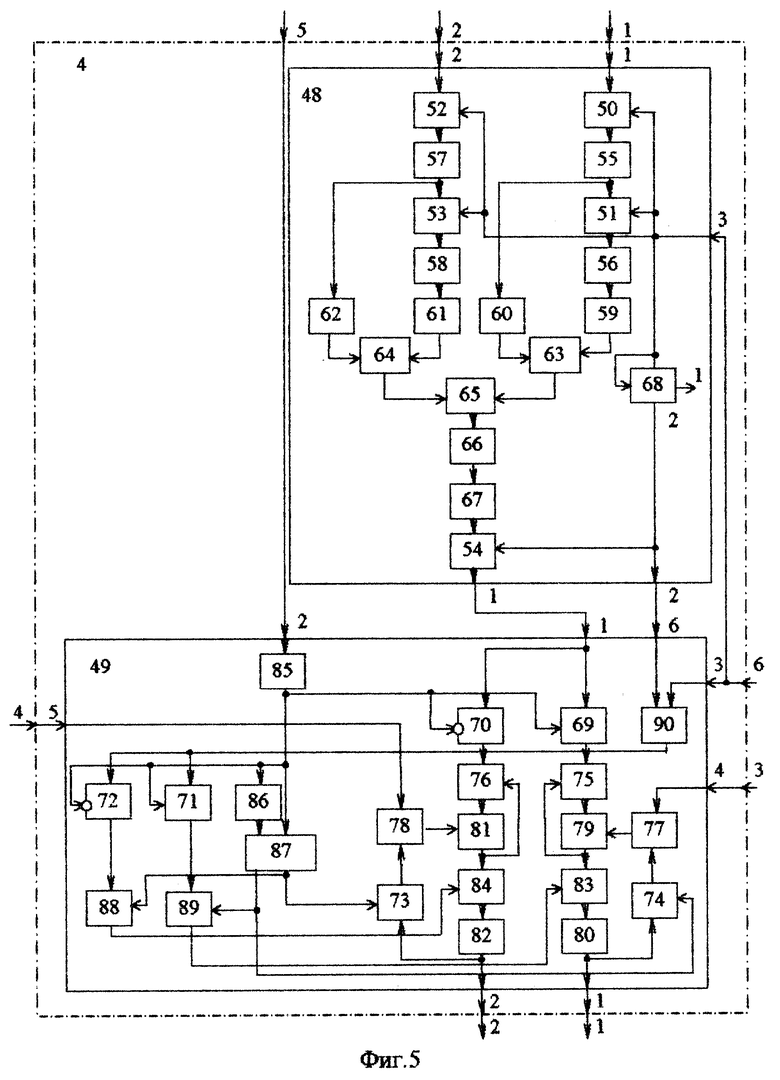
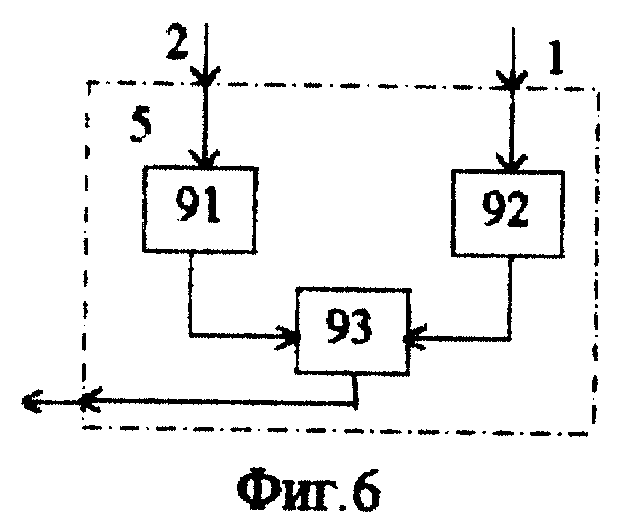
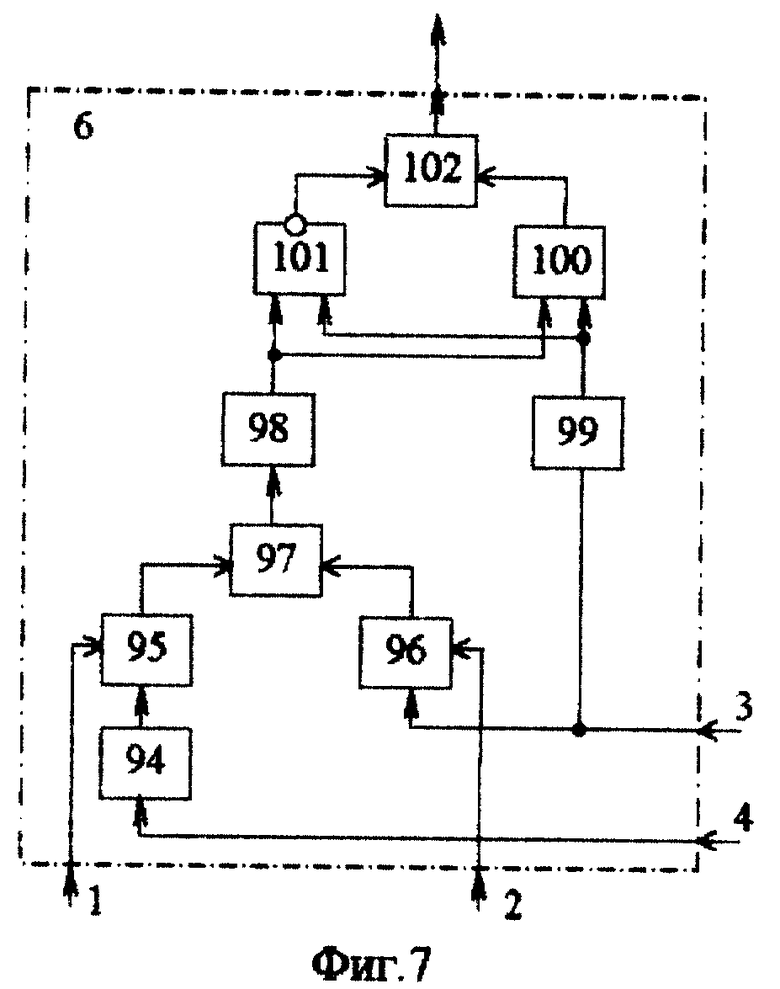
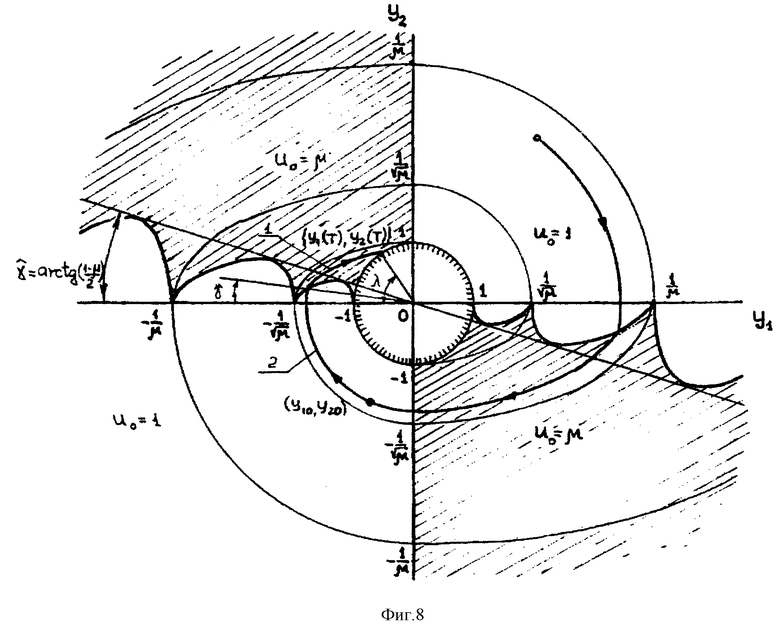
На фиг.1 представлена функциональная схема предлагаемого устройства, на фиг. 2 - структурная схема блока преобразования координат, на фиг.3 - то же, нормирующего блока, на фиг.4 - то же, блока расчета параметров, на фиг.5 - то же, блока оценки частоты, на фиг.6 - то же, блока формирования параметра глубины управления, на фиг.7 - то же, блока управления жесткостью упругого элемента, на фиг.8 - фазовая траектория движения упругого элемента.
Устройство для успокоения колебаний упругого элемента переменной жесткости содержит (фиг. 1): объект 1 управления с присоединенным упругим элементом, датчик 2 отклонения упругого элемента, дифференцирующий блок 3, блок 4 оценки частоты, блок 5 формирования параметра глубины управления, блок 6 управления жесткостью упругого элемента, регулятор 7 жесткости, генератор 8 тактовых импульсов, ключ 9, компаратор 10, блок 11 преобразования координат, нормирующий блок 12 и блок 13 расчета параметров. Первый, второй и третий источники постоянного напряжения на схеме не показаны.
Блок 11 преобразования координат (фиг.2) содержит первый и второй ключи 14 и 15, первый 16, второй 17 и третий 18 блоки умножения, первый и второй квадраторы 19 и 20, сумматор 21, нелинейный элемент 22, выполняющий функцию извлечения квадратного корня.
Нормирующий блок 12 (фиг.3) содержит первый 23, второй 24, третий 25 и четвертый 26 нелинейные элементы, первый и второй делители 27 и 28, блок 29 умножения, причем нелинейные элементы 23 и 24 служат для формирования функции натурального логарифма от входных сигналов, нелинейный элемент 25 осуществляет выделение целой части от входного сигнала, а нелинейный элемент 26 обеспечивает реализацию экспоненциальной функции.
Блок 13 расчета параметров (фиг. 4) содержит первый 30 и второй 31 квадраторы, первый-восьмой сумматоры 32-39, первый-четвертый делители 40-43, первый 44, второй 45 и третий 46 нелинейные элементы - формирователи квадратного корня, источник 47 единичного постоянного напряжения.
Блок 4 оценки частоты (фиг.5) содержит блок 48 формирования оценки и блок 49 осреднения.
Блок 48 формирования оценки содержит пять ключей 50 54, четыре запоминающих элемента 55-58, четыре квадратора 59-62, два сумматора 63 и 64, делитель 65, формирователь 66 модуля, нелинейный элемент 67, двухразрядный сдвиговый регистр 68.
Блок 49 осреднения содержит шесть ключей 69-74, четыре сумматора 75-78, четыре запоминающих элемента 79-82, два делителя 83 и 84, элемент 85 задержки, инвертор 86, триггер 87, два счетчика 88 и 89, элемент И 90.
Блок 5 формирования параметра глубины управления (фиг.6) содержит два квадратора 91-92, делитель 93.
Блок 6 управления жесткостью упругого элемент (фиг.7) содержит инвертор 94, два делителя 95 и 96 напряжения, сумматор 97, два релейных элемента 98 и 99, элемент И 100, элемент ИЛИ-НЕ 101, элемент ИЛИ 102.
В основу изобретения положено следующее.
Динамика объекта управления в режиме свободных колебаний, в предположении малости его собственной диссипации, описывается системой дифференциальных уравнений второго порядка:
где q1, q2 - обобщенные фазовые координаты осциллятора;
V∈[Vmin, Vmax] - управляющий параметр, характеризующий жесткостные свойства упругого элемента (УЭ),
Vmin = ω
Известна формулировка задачи t-оптимального подавления колебаний упругого элемента за счет изменения его жесткости и в виде [1,2]: требуется найти закон изменения параметра V, обеспечивающий перевод объекта (1) из начального состояния {q1(t0)=q10, q2(t0)=q20} в конечное состояние {q1k(tk)=0, q2k(tk)=0} и при этом доставляющий минимум показателю качества
Однако следует отметить, что с технической точки зрения целесообразно обеспечить перевод УЭ в некоторую достаточно малую окрестность начала координат, в которой энергия остаточных колебаний не превышает заданный максимально допустимый уровень E. В этой связи возможна другая постановка задачи t-оптимального гашения колебаний осциллятора. Пусть в номинальном режиме функционирования жесткость УЭ устанавливается максимальной (ω = ωmax). Тогда полную механическую энергию колебаний осциллятора в начальный момент времени t0 оценим соотношением E0 = 0,5m(ω
Требуется найти закон изменения параметра V, который обеспечивает перевод объекта (1) в конечное состояние {q1(tk)=q1k, q2(tk)=q2k}, удовлетворяющее ограничению
Ek = 0,5m(ω
и доставляет при этом минимум функционалу (2).
В дальнейшем без ограничения общности положим t0=0. Заменим ограничение (3) равенством Еk=Е*. Отметим, что если в управляемом процессе обеспечивается невозрастание энергии колебаний УЭ, то проведенная замена не приводит к суживанию множества искомых решений поставленной задачи.
Введем обозначения:
В новых координатах система (1) преобразуется к виду:
y'1=y2, y'2=-uy2, (5)
где  i= 1,2; u = ω2/ω
i= 1,2; u = ω2/ω
Требуется найти управление
переводящее систему (5) из состояния {y1(0), y2(0)}: y1 2(0)+y2 2(0)>1 в состояние
{y1(T),y2(T)}∈Φ(T):y
Задача (5)-(7) является классической задачей оптимального управления и может быть решена с использованием принципа максимума Л.С. Понтрягина [3].
Введем в рассмотрение гамильтониан
H = -1+ψ1y2-uψ2y1, (8)
где ψ1,ψ2 - сопряженные переменные, удовлетворяющие каноническим уравнениям:
В соответствии с принципом максимума оптимальное управление u0, являющееся решением задачи (5)-(7), удовлетворяет условию  из которого устанавливается его структура:
из которого устанавливается его структура:
Несложно показать, что в рассматриваемой задаче не существует вырожденных управлений, не заданных структурой (10). Данное обстоятельство позволяет доопределить функцию u0 в точках, где ψ2у1=0, из условий ее непрерывности справа (слева). Следовательно, допустимо принять, что оптимальное управление u0 является кусочно-постоянной функцией и на каждом интервале постоянства может принимать значения либо u0=1, либо u0=μ.
На каждом интервале постоянства управления u0 решение систем (5) и (9) имеют вид:
где τ∈[0,τk], τk - конец интервала; А, В, α,β - постоянные на интервале амплитуды и фазы колебаний - решений соответственно прямой и сопряженной систем, причем
В дальнейшем удобно воспользоваться построениями на фазовой плоскости (y1, y2), на которой множество конечных состояний Ф(Т), определенное соотношением (7), представляет единичную окружность. Из (11) получим уравнение фазовой траектории осциллятора в этой плоскости
y1 2+y2 2/u0=A2. (13)
Отсюда непосредственно следует, что при u0= 1 фазовая траектория УЭ представляет собой окружность с центром в начале координат, а при u0=μ>0 - эллипс, получаемый из соответствующей окружности сжатием по оси Оy2 с коэффициентом  . Движение фазовой точки по указанным траекториям осуществляется по часовой стрелке.
. Движение фазовой точки по указанным траекториям осуществляется по часовой стрелке.
Учитывая данные обстоятельства, а также принимая во внимание непрерывность фазовых траекторий УЭ, заключаем, что окончание управляемого процесса (приход фазовой точки на финальное множество Ф(Т)) может иметь место лишь при u0= μ, причем только во втором или четвертом квадрантах фазовой плоскости. В свете вышесказанного, в соответствии с оптимальной логикой (10), переключение с минимальной жесткости на максимальную должно осуществляться на оси y1=0, а обратный переход - в точках фазовой плоскости, удовлетворяющих условию ψ2=0.
Исследуем случай, когда достаточно одного переключения управления дня перевода фазовой точки на множество Ф(Т), при этом для определенности будем полагать, что финальная точка лежит в четвертом квадранте фазовой плоскости (фиг.8).
Пусть в начальный момент времени упругая система находится в одной из точек дуги окружности 2 и характеризуется начальной амплитудой ρ1(y
y
Отсюда с использованием соотношений
y1(τ*) = -ρ1cosγ; y2(τ*) = ρ1sinγ;
y1(T) = -cosλ; y2(T) = sinλ
имеем
sin2λ = {ρ
Определим время процесса. Затраты на движение по дуге 2 окружности составляют
τ1 = |arctg(y20/y10)|+γ.
Для определения временных затрат на движение по эллиптическому участку 1 целесообразно осуществить переход на фазовую плоскость  На этой плоскости траектория участка 1 представляется дугой окружности, движение по которой (см. (11)), осуществляется с постоянной угловой скоростью, равной
На этой плоскости траектория участка 1 представляется дугой окружности, движение по которой (см. (11)), осуществляется с постоянной угловой скоростью, равной  Вычислим углы γ′ и λ′, соответствующие углам γ и λ на новой плоскости.
Вычислим углы γ′ и λ′, соответствующие углам γ и λ на новой плоскости.
Имеем
или
Аналогичным образом получим
Следовательно, время движения по эллиптическому участку 1 составит
Таким образом, суммарное время процесса
где учтена связь (14) и введено обозначение κ(μ,γ) = μ+(1-μ)sin2γ.
Смысл оптимизации управления сводится к нахождению угла γ*:
Исследования функции g1(γ*) на экстремум показывает, что ее точка минимума должна удовлетворять условию
tgγ*/{[ρ
при 
Соотношение (17) может быть преобразовано к виду
Учитывая, что при допустимых значениях параметров μ и γ* κ(μ,γ*)≠0, находим интересующий нас корень приведенного выше квадратного уравнения:
Используя (18), получим выражение для оптимального угла γ*:
γ* = arcsin{[κ1-μ]/(1-μ)}1/2. (19)
Отношения (18) и (19) свидетельствуют о том, что в случае одного переключения управления оптимальный угол логики γ* зависит не только от параметра μ глубины управления жесткостью, но также от начальной амплитуды процесса. Данный результат существенно отличается от полученного в работе [2] и положенного в дальнейшем в основу изобретения [1].
Получение аналитических зависимостей для параметра γ* в случае нескольких переключении управления в течение процесса представляет существенные трудности. В этой связи предлагается воспользоваться свойством подобия рассматриваемой системы, суть которого состоит в том, что для любого из диапазонов начальных амплитуд  где k - натуральное число, можно сформулировать задачу о t-оптимальном приведении осциллятора на границу диапазона - окружность радиуса
где k - натуральное число, можно сформулировать задачу о t-оптимальном приведении осциллятора на границу диапазона - окружность радиуса  Эта задача преобразованием координат
Эта задача преобразованием координат
 .
.
сводится к постановке (5)-(7), решение которой известно. Следовательно, для каждого из вышеуказанных диапазонов начальных амплитуд соотношения (18)-(19) сохраняют свой вид при условии, что в этих соотношениях принято
На фиг. 8 на фазовой плоскости (у1, у2) для значения параметра μ=const качественно показан вид линии переключения управления. На интервале начальных амплитуд  она построена с использованием соотношений (18) и (19), а для диапазона начальных амплитуд
она построена с использованием соотношений (18) и (19), а для диапазона начальных амплитуд  - с использованием свойства подобия.
- с использованием свойства подобия.
Предлагаемое устройство функционирует следующим образом. После воздействия внешнего возмущающего момента упругий элемент начинает колебаться с максимальной частотой ωmax, поскольку в состоянии покоя жесткость упругого элемента максимальна (из условия снижения амплитуды колебаний, возникающих от действия внешнего возмущающего импульса). Датчик 2 отклонения начинает выдавать текущее значение величины обобщенной координаты q1 отклонения упругого элемента, которое поступает на вход дифференцирующего блока 3, первый вход блока 4 оценки частоты и первый вход блока 11 преобразования координат. Текущее значение обобщенной скорости q2 упругого элемента, выдается с выхода дифференцирующего блока 3 на второй вход блока 4 оценки частоты и второй вход блока 11 преобразования координат. Сигналы с первого и второго входов блока 11 преобразования координат поступают на информационные входы ключей 14 и 15 соответственно, которые открываются импульсами с генератора 8 тактовых импульсов, благодаря чему осуществляется общая синхронизация процессов в блоке 11 преобразования координат с процессами в остальной части системы. Поэтому в начале каждого (i+1)-го такта генератора тактовых импульсов на втором выходе блока 4 оценки частоты уже сформирована оценка текущего значения ω На выходе делителя 27 в полном соответствии с формулой (20) формируется сигнал
На выходе делителя 27 в полном соответствии с формулой (20) формируется сигнал  который образует выход нормирующего блока 12.
который образует выход нормирующего блока 12.
Информация с выхода нормирующего блока 12 поступает на первый вход блока 13 расчета параметров, на второй вход которого приходит сигнал μ(i) сформированный на выходе блока 5. Отметим, что совокупность элементов 30-37, 40, 41, 44 и 47 используется для формирования значения функции κ1 по соотношению (18), а элементы 38, 39,42,43,45,46 и 47 - для формирования значений cosγ* и -sinγ* по соотношениям
На выходах сумматоров 32 и 33 формируются соответственно сигналы (1+μ(i)) и (1-μ(i)) на выходе сумматора 35 - сигнал {ρ
Полученная информация выдается на первом и втором выходах блока 13 расчета параметров, которым в устройстве-прототипе отвечает информация, поступающая соответственно на первый и второй входы блока 6 управления жесткостью упругого элемента.
В остальном функционирование предлагаемого устройства аналогично известному.
Положительный эффект - сокращение длительности переходных процессов в предлагаемом устройстве достигается за счет осуществления непрерывной коррекции параметров линии переключения управления в зависимости от текущей величины амплитуды колебаний в соответствии с оптимальной логикой.
Таким образом, отличительные признаки предлагаемого устройства способствуют достижению поставленной цели.
Источники информации
1. А.с. СССР 1500990, кл.4 G 05 В 11/01, 1987 (прототип).
2. Мануйлов Ю.С. Синтез оптимального управления жесткостью упругих динамических объектов // Приборостроение, 1986, т. XXIX, 11, с. 27-31.
3. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Г.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. - М.: Наука, 1969, 384 с.
Изобретение относится к демпфированию колебаний упругих элементов конструкции объектов, может быть преимущественно использовано при проектировании и создании перспективных систем управления объектами ограниченной жесткости. Технический результат заключается в повышении быстродействия устройства. Устройство содержит объект управления с присоединенным упругим элементом, датчик отклонения упругого элемента, дифференцирующий блок, блок оценки частоты, блок формирования параметров глубины управления, блок управления жесткостью упругого элемента, регулятор жесткости, генератор тактовых импульсов, ключ, компаратор, блок преобразования координат, нормирующий блок, блок расчета параметров. 3 з.п.ф-лы, 8 ил.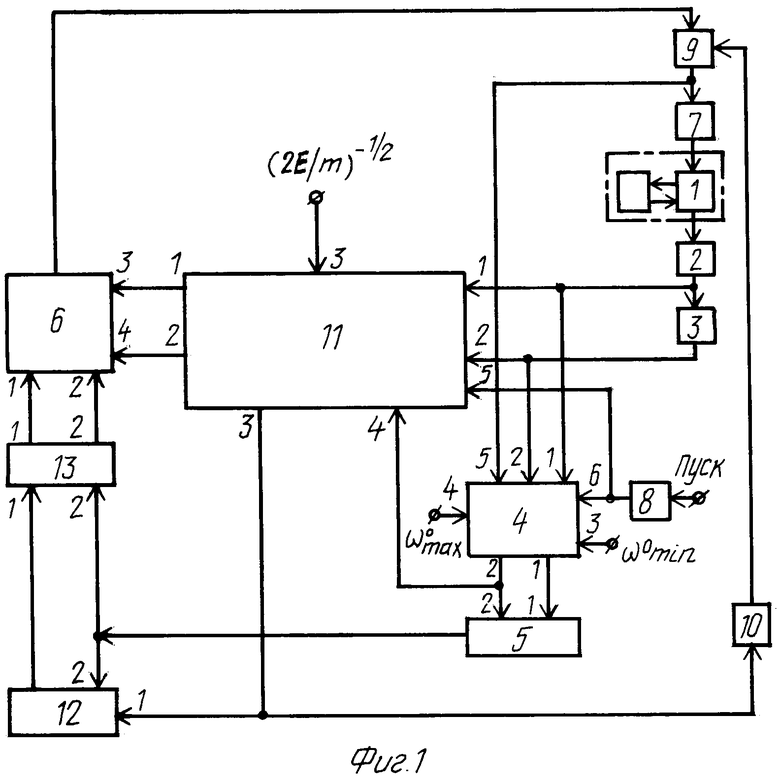
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1987 |
|
SU1500990A2 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1983 |
|
SU1129585A1 |
| US 4633982 А, 06.01.1987 | |||
| МАНУЙЛОВ Ю.С | |||
| Синтез оптимального управления жесткостью упругих динамических объектов | |||
| - Приборостроение, 1986, т | |||
| XXIX, № 11, с.27-31. | |||

