Изобретение относится к машиностроительной гидравлике и может быть использовано в системах терморегулирования изделий авиационной и ракетной техники, а также в других областях техники.
Известен способ регулирования подачи установленного в гидравлическом контуре центробежного насоса, заключающийся в дросселировании в трубопроводе [1]. Недостатком этого способа является повышенный расход энергии.
Этого недостатка лишен способ регулирования подачи установленного в гидравлическом контуре центробежного насоса, заключающийся в регулировании частоты n вращения вала насоса увеличением ее для повышения подачи Q и уменьшением ее для снижения подачи Q [2], выбранный в качестве прототипа. Наиболее часто регулирование частоты n вращения вала насоса осуществляют изменением напряжения, подаваемого на обмотки приводного электродвигателя постоянного тока.
Недостатком этого способа регулирования подачи является повышенная чувствительность подачи Q к изменению частоты n вращения вала насоса, вследствие чего "подача насоса изменяется во много раз быстрее изменения числа оборотов" [3]. Такая характеристика "подача - частота" обеспечивает возможность регулировать подачу в широких пределах, однако эта же характеристика снижает точность регулирования, ибо незначительное изменение частоты оборотов вала насоса (в пределах допуска на точность задания управляющего параметра) приводит к значительным изменениям подачи. Указанный недостаток ограничивает применение способа-прототипа для регулирования подачи теплоносителя в системах терморегулирования изделий авиационной и ракетной техники, что приводит к усложнению гидравлических схем систем терморегулирования за счет введения в их состав специальных агрегатов для регулирования подачи типа клапанов перепуска [4]. Подобное усложнение системы терморегулирования является следствием невозможности в способе-прототипе обеспечить точность регулирования, преимущественно в области малых подач насоса (в этом диапазоне обеспечивается, как правило, регулирование подачи насоса при расчетном тепловом режиме космического аппарата, в то время как использование больших значений подачи насоса встречается при экстремальных или аварийных тепловых режимах, в которых требования к точности регулирования температуры, а значит и к точности регулирования подачи теплоносителя ниже).
Техническим результатом, достигаемым с помощью заявленного изобретения, является повышение точности регулирования в области малых значений подач.
Этот результат достигается за счет того, что в известном способе регулирования подачи установленного в гидравлическом контуре центробежного насоса, заключающемся в регулировании частоты n вращения вала насоса увеличением ее для повышения подачи Q и уменьшением ее для снижения подачи Q, согласно изобретению, при повышении подачи Q от 0 до максимального значения Qmax производят вращение вала насоса в обратном расчетному направлении и регулирование частоты n вращения вала насоса в процессе ее увеличения от 0 до значения nобр, при котором обеспечивается равенство подачи Q заранее заданному значению Qпер, затем производят изменение направления вращения вала насоса на расчетное и устанавливают частоту вращения nпр, при которой обеспечивается равенство Q= Qпер, и при дальнейшем повышении подачи Q от Qпер до Qmax производят увеличение частоты n вращения от nпр до максимального значения nmax а при снижении подачи Q от Qmax до 0 производят вращение вала насоса в расчетном направлении и уменьшение частоты n вращения от nmax до nпр, затем производят изменение направления вращения вала насоса на обратное расчетному и устанавливают частоту вращения nобр и при дальнейшем снижении подачи Q от Qпер до 0 производят уменьшение частоты n вращения от nобр до 0, при этом величины Qmax, nпр и nобр определяют предварительными проливками контура. Так как заявленная совокупность существенных признаков способа позволяет получить указанный технический результат, то заявленный способ соответствует критерию "изобретательский уровень".
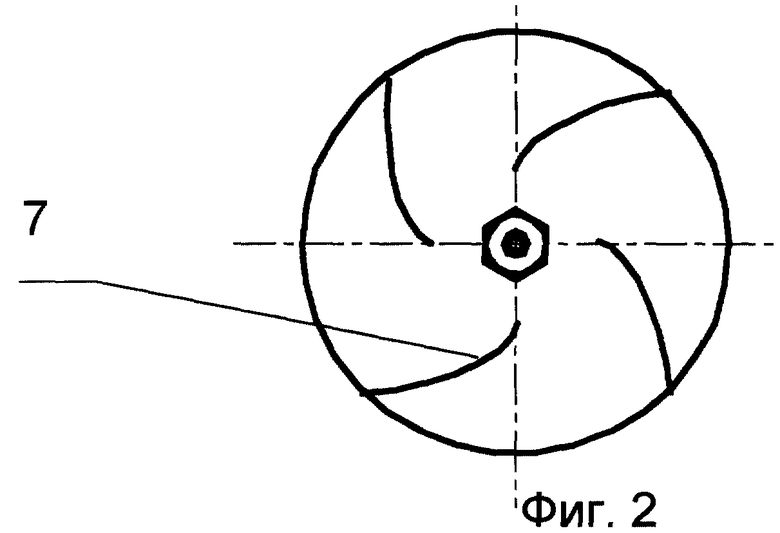
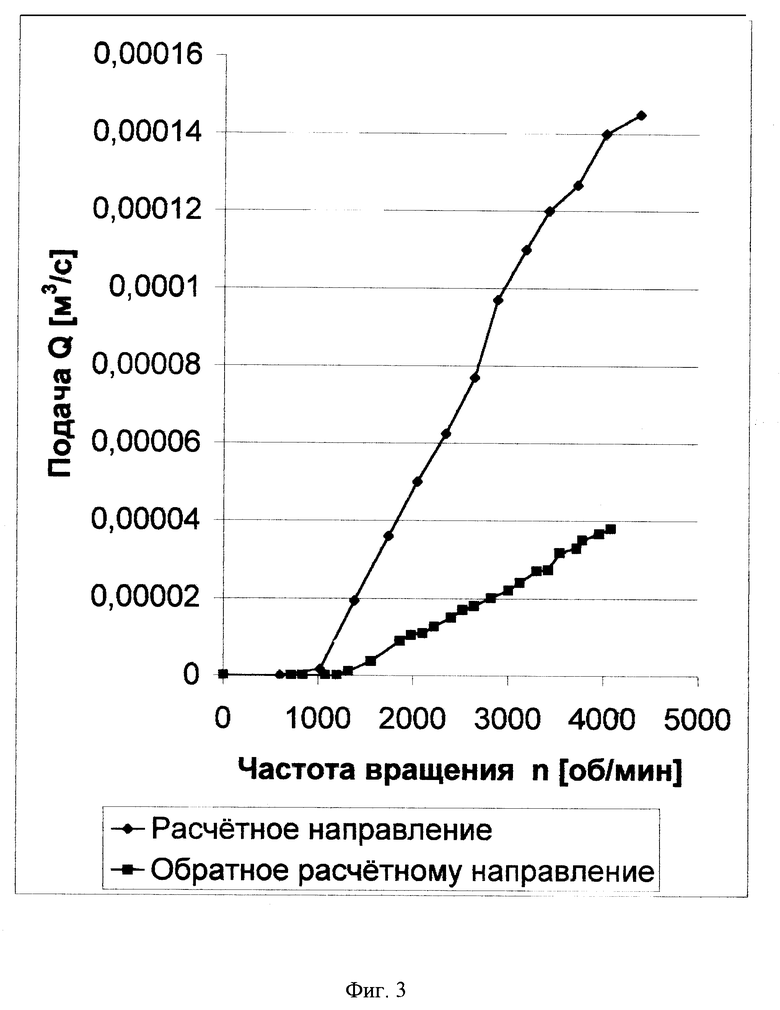
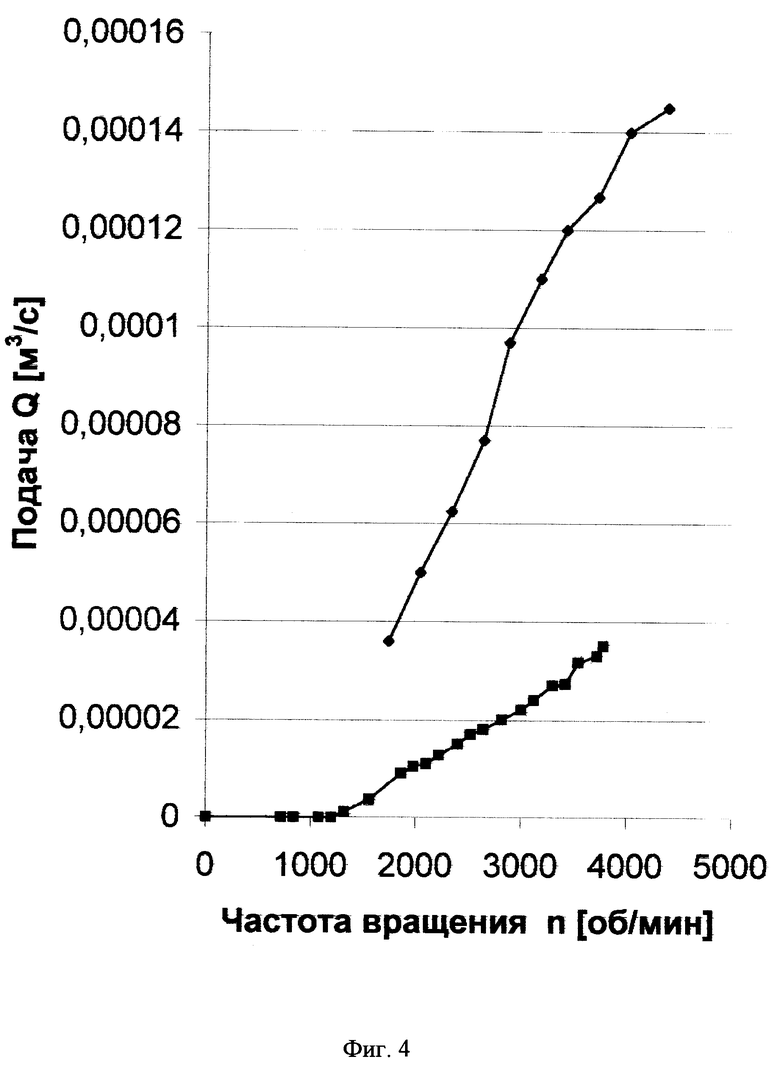
На фиг. 1 приведен пример конкретного выполнения центробежного насоса, для которого осуществляют заявленный способ регулирования подачи, продольный разрез; на фиг. 2 - то же, схема рабочего колеса насоса; на фиг. 3 приведены характеристики конкретного центробежного насоса, установленного в гидравлическом контуре, при расчетном и обратном расчетному направлениях вращения рабочего колеса; на фиг. 4 приведена результирующая характеристика, по которой осуществляется способ регулирования этого насоса.
Описываемый центробежный насос содержит корпус 1, в котором установлен приводной электродвигатель 2. На валу электродвигателя 2 установлено рабочее колесо 3. В корпусе 1 выполнены входной штуцер 4, улитка 5, выходящая в выходной штуцер 6. Рабочее колесо снабжено четырьмя лопатками 7. Штуцеры 4 и 5 соединены с гидравлическим контуром (не показан).
Способ регулирования осуществляют следующим образом: первоначально производят гидравлические проливки контура, в котором установлен центробежный насос, с использованием измерительной аппаратуры (ротаметры, манометры и т. п. ) и определяют зависимости развиваемой подачи Q от частоты вращения n насоса (определяется по показаниям таходатчика приводного электродвигателя 2) при расчетном (против часовой стрелки на фиг. 2) и обратном расчетному (по часовой стрелке) направлениям вращения рабочего колеса 3 насоса. Полученные зависимости имеют характер, показанный на фиг. 3 (верхняя кривая для расчетного направления вращения рабочего колеса насоса, нижняя кривая для обратного расчетному направлению вращения рабочего колеса насоса; конкретные значения подачи и чисел оборотов различны для разных типоразмеров насосов, однако общая закономерность изменения этих параметров неизменна, что подтверждается экспериментальными проливками двух типоразмеров электронасосных агрегатов, проведенных в Ракетно- космической корпорации "Энергия" им. С.П. Королева и приведенных в приложении). По полученным графикам определяют Qmax. В данном примере Qmax = 0,000145 м3/с и nmax = 4380 об/мин. По тепловому расчету контура терморегулирования известно максимальное значение Qпер потребной подачи насоса, перекачивающего теплоноситель, при номинальном режиме тепловыделения в космическом летательном аппарате. Заметим, что значение потребной подачи является величиной переменной, зависящей от программы полета, количества членов экипажа, программы бортовых экспериментов и т.д. Очевидно, что именно в диапазоне от нуля до максимального значения Qпер потребной подачи при номинальном режиме тепловыделения требуется повышенная точность регулирования температуры для обеспечения комфортных условий полета. При отклонении режима тепловыделения от номинального (что возможно при аварийных ситуациях, проведении крупномасштабных экспериментов и т.п.) требуется способность обеспечить максимальную подачу Qmax, которую может развить насос, при этом требования к точности регулирования снижаются, т.к. продолжительность таких ситуаций мала по сравнению с номинальным режимом. В данном примере конкретного выполнения техническим заданием на систему терморегулирования заранее определено значение Qпер = 0,000036 м3/, по графикам на фиг. 3 определяют соответствующие этому значению частоты вращения вала насоса nпр = 1740 об/мин (при расчетном направлении вращения) и nобр = 3886 об/мин (при обратном расчетному направлении вращения). При повышении подачи Q от 0 до максимального значения Qmax производят вращение вала насоса в обратном расчетному направлении и регулирование частоты n вращения вала насоса в процессе ее увеличения от 0 до значения nобр = 3886 об/мин, при котором обеспечивается равенство подачи Q заранее заданному значению Qпер = 0,000036 м3/с (на участке от 0 до крайней правой точки нижней кривой на фиг. 4), затем производят изменение направления вращения вала насоса на расчетное и устанавливают частоту вращения nпр = 1740 об/мин, при которой обеспечивается равенство Q=Qпер = 0,000036 м3/с (соответствует переходу от крайней правой точки нижней кривой до крайней левой точки верхней кривой на фиг. 4). При дальнейшем повышении подачи Q от Qпер = 0,000036 м3/с до Qmax = 0,000145 м3/с производят увеличение частоты n вращения от nпр = 1740 об/мин до максимального значения nmax = 4380 об/мин (участок от крайней левой до крайней правой точки верхней кривой на фиг. 4). При снижении подачи Q от Qmax = 0,000145 м3/с до О производят вращение вала насоса в расчетном направлении и уменьшение частоты n вращения от nmax = 4380 об/мин до nпр = 1740 об/мин (участок от крайней правой до крайней левой точки верхней кривой на фиг. 4), затем производят изменение направления вращения вала насоса на обратное расчетному и устанавливают частоту вращения nобр = 3886 об/мин (соответствует переходу от крайней левой точки верхней кривой до крайней правой точки нижней кривой на фиг. 4) и при дальнейшем снижении подачи Q от Qпер = 0,000036 м3/с до 0 производят уменьшение частоты n вращения от значения nобр = 3886 об/мин до 0 (на участке от крайней правой точки нижней кривой на фиг. 4 до 0). Таким образом, за счет более пологой характеристики нижней кривой по сравнению с верхней кривой обеспечивается повышенная точность регулирования в диапазоне изменения подачи от 0 до Qпер, так как одному и тому же значению изменения n соответствует меньшее (по сравнению с прототипом) изменение подачи Q (в приведенном конкретном примере точность регулирования в диапазоне изменения подачи от 0 до Qпер = 0,000036 м3/с повышается приблизительно в 3,7 раза. Очевидно, что подобное повышение точности регулирования происходит за счет снижения КПД насоса при его вращении в обратном расчетному направлении, однако это снижение КПД происходит в области малых значений подачи и соответственно малой абсолютной величине потребляемой насосом мощности. Поэтому данное снижение КПД является допустимым (уровень потребляемой насосом мощности определяется в зоне высоких значений подачи при расчетном направлении вращения насоса и соответственно высоком значении КПД. За счет допустимого снижения КПД в области малых значений подачи обеспечивается существенное повышение точности регулирования подачи в этой зоне, при этом гидравлическая схема контура, в котором установлен насос, остается неизменной. Регулирование же скорости вращения вала насоса и изменение направления его вращения легко обеспечиваются на современной элементной базе (бесконтактные электродвигатели серии БК-2 по ОСТ В 16.0515.054-80 позволяют осуществлять изменение направления вращения за счет коммутации обмоток статора и регулирование частоты вращения в широких пределах за счет изменения амплитуды подаваемого постоянного напряжения). Реверсирование электродвигателя и амплитудная модуляция напряжения питания легко поддаются алгоритмизации и управлению от устройства управления (бортовой вычислительной машины или автономного прибора). Повышение точности регулирования в области малых значений подачи дает возможность упростить структурную схему контуров терморегулирования космических летательных аппаратов за счет исключения специальных агрегатов для регулирования потоков теплоносителя, что, в свою очередь, повышает надежность системы терморегулирования в целом. Указанные преимущества позволяют рекомендовать заявленное изобретение к широкому внедрению в космической технике.
Литература
1. К. Пфлейдерер, "Лопаточные машины для жидкостей и газов", М., Государственное научно-техническое издательство машиностроительной литературы, 1960, стр. 478.
2. Там же, стр. 486 (прототип).
3. Там же, стр. 487.
4. М.В. Краев, В.А. Лукин, Б.В. Овсянников, "Малорасходные насосы авиационных и космических систем", М.: Машиностроение, 1985, стр.6, рис. 1.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРОБЕЖНЫЙ ЭЛЕКТРОНАГНЕТАТЕЛЬ | 1999 |
|
RU2172431C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ДАВЛЕНИЕМ В СИСТЕМЕ ТЕРМОРЕГУЛИРОВАНИЯ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2172280C2 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2162549C1 |
| ЦЕНТРОБЕЖНЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2160388C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2160390C1 |
| УСТРОЙСТВО ВЫПУСКА ТРОСА СВЯЗКИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕГО | 1999 |
|
RU2148535C1 |
| СПОСОБ ОСУШКИ ВНУТРЕННИХ МАГИСТРАЛЕЙ СИСТЕМЫ ТЕРМОРЕГУЛИРОВАНИЯ | 1999 |
|
RU2170608C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГИДРАВЛИЧЕСКОЙ СИСТЕМЕ ТЕРМОРЕГУЛИРОВАНИЯ С ГАЗОЖИДКОСТНЫМ КОМПЕНСАТОРОМ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2160217C1 |
| ДУБЛИРОВАННЫЙ ЭЛЕКТРОВЕНТИЛЯТОР | 1998 |
|
RU2150031C1 |
| ДУБЛИРОВАННЫЙ ЭЛЕКТРОВЕНТИЛЯТОР | 2000 |
|
RU2174195C1 |
Способ регулирования подачи центробежного насоса относится к машиностроительной гидравлике и может быть использован в авиационной и космической технике, а также в других областях техники. Техническим результатом, достигаемым с помощью заявленного изобретения, является повышение точности регулирования в области малых значений подач. Способ регулирования подачи установленного в гидравлическом контуре центробежного насоса заключается в регулировании частоты n вращения вала насоса увеличением ее для повышения подачи Q и уменьшением ее для снижения подачи Q. При этом при повышении подачи Q от 0 до максимального значения Qmax производят вращение вала насоса в обратном расчетному направлении и регулирование частоты n вращения вала насоса в процессе ее увеличения от 0 до значения nобр, при котором обеспечивается равенство подачи Q заранее заданному значению Qпер.. Затем производят изменение направления вращения вала насоса на расчетное и устанавливают частоту вращения nпр, при которой обеспечивается равенство Q = Qпер.. При дальнейшем повышении подачи Q от Qпер. до Qmax производят увеличение частоты n вращения от nпр до максимального значения nmax. При снижении подачи Q от Qmax до 0 производят вращение вала насоса в расчетном направлении и уменьшение частоты n вращения от nmax до nпр. Затем производят изменение направления вращения вала насоса на обратное расчетному и устанавливают частоту вращения nобр и при дальнейшем снижении подачи Q от Qпер. до 0 производят уменьшение частоты n вращения от nобр до 0. Величины Qmax, nпр и nобр определяют предварительными проливками контура. Использование изобретения позволяет повысить точность регулирования в области малых значений подач. 4 ил.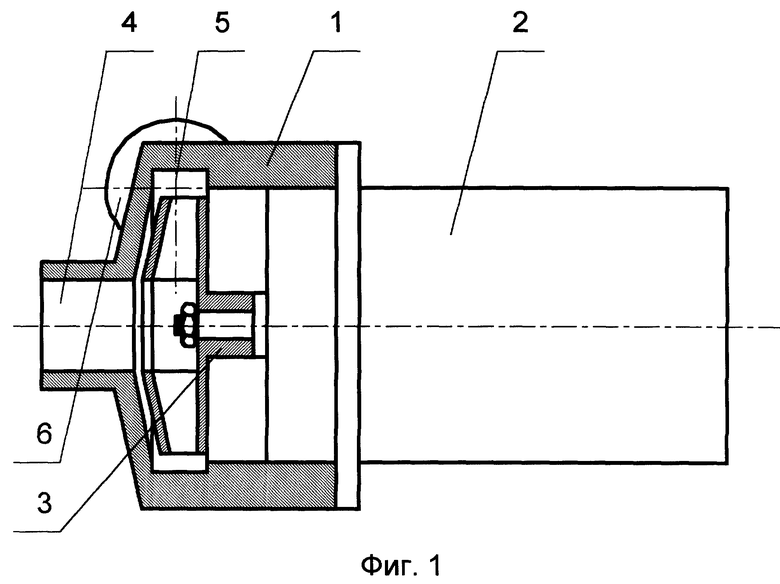
Способ регулирования подачи установленного в гидравлическом контуре центробежного насоса, заключающийся в регулировании частоты n вращения вала насоса увеличением ее для повышения подачи Q и уменьшением ее для снижения подачи Q, отличающийся тем, что при повышении подачи Q от 0 до максимального значения Qmax производят вращение вала насоса в обратном расчетному направлении и регулирование частоты n вращения вала насоса в процессе ее увеличения от 0 до значения nобр, при котором обеспечивается равенство подачи Q заранее заданному значению Qпер, затем производят изменение направления вращения вала насоса на расчетное и устанавливают частоту вращения nпр, при которой обеспечивается равенство Q=Qпер, и при дальнейшем повышении подачи Q от Qпер до Qmax производят увеличение частоты n вращения от nпр до максимального значения nmax, а при снижении подачи Q от Qmax до 0 производят вращение вала насоса в расчетном направлении и уменьшение частоты n вращения от nmax до nпр, затем производят изменение направления вращения вала насоса на обратное расчетному и устанавливают частоту вращения nобр и при дальнейшем снижении подачи Q от Qпер до 0 производят уменьшение частоты n вращения от nобр до 0, при этом величины Qmax, nпр и nобр определяют предварительными проливками контура.
| ПФЛЕЙДЕРЕР К | |||
| Лопаточные машины для жидкостей и газов | |||
| - М.: Машгиз, 1960, с.486 | |||
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ НАСОСНОЙ УСТАНОВКИ В СКВАЖИНЕ | 1991 |
|
RU2016252C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ ЦЕНТРОБЕЖНОГО ГИДРАВЛИЧЕСКОГО НАСОСА И ТРЕХФАЗНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2116517C1 |
| НАСОСНАЯ УСТАНОВКА | 1991 |
|
RU2037666C1 |
| Способ регулирования режима работы насоса с электродвигателем | 1988 |
|
SU1571302A1 |
| DE 2922997 А1, 18.12.1980 | |||
| DE 3225141 А1, 16.02.1984. | |||
