Предлагаемое изобретение относится к области измерительной техники, а именно к лазерной интерферометрии, и может быть использовано для бесконтактного быстродействующего определения пространственного положения кромки, границы объекта (детали), определения отклонения от прямолинейности этой кромки детали, например лезвий, кромок режущих инструментов, а также для определения пространственного распределения износа резцов на металлорежущих станках.
Известен способ распознавания положения края и профиля поверхности /1/(аналог). В этом изобретении система (С) для распознавания профиля волнистой поверхности (ВП) содержит щуп типа иглы фонографа для ощупывания ВП и регистрации ее резких изменений и датчик, взаимодействующий со щупом, и генерирующий сигнал, характеризирующий изменения конфигурации ВП. Щуп "подвешен" на опорном устройстве над ВП в состоянии контакта с ней. При этом собственная частота опорного устройства (2,5 Гц) позволяет изолировать щуп от действия низкочастотных (0,1-0,01 Гц) составляющих (волнистости) контура ВП, вследствие чего щуп реагирует только на высокочастотные составляющие этого контура, механически отфильтровывая низкочастотные. Сигнал с датчика подают на детектор, формирующий характеристики ВП в составе ее высокочастотных составляющих, обрабатывают в системе усреднения, сравнивают с эталонным уровнем для определения ориентации волокон материала, формирующего ВП.
Основным недостатком данного способа является ограничение функциональных возможностей, связанное с необходимостью контактирования щупа с контролируемой деталью и соответственно низкой точностью и быстродействием измерения смещений границы, например для острых кромок лезвий, резцов и др.
Известен интерференционный способ определения положения границы объекта /2/ (аналог), согласно которому сканируют объект когерентным монохроматическим световым пучком, формируют световые пучки, образующие перемещающиеся навстречу друг другу изображения границы объекта, осуществляют интерференцию этих пучков с разностью хода, равной нечетному числу полуволн используемого излучения, и преобразуют результирующий световой поток в электрический сигнал, после сканирования каждый пучок делят на два равных пучка с взаимным смещением их на величину, не превышающую четвертую часть их диаметра, и с разностью хода, равной нечетному числу полуволн используемого света.
Недостатком этою способа является ограничение точности измерений из-за реализации гомодинной интерференционной схемы, в которой погрешность определяется наличием различных внешних засветок, изменений чувствительности фотоприемника и низкой помехоустойчивости. Кроме этого, в этом техническом решении также ограничено быстродействие процесса, связанное с необходимостью перемещения контролируемого объекта относительно объектива устройства.
Наиболее близким по технической сущности к предлагаемому является способ определения границы объекта /3/ (прототип), который заключается в том, что формируют световой луч, объект вводят в световой луч перпендикулярно направлению распространения луча, преобразуют световой поток, прошедший мимо кромки объекта в электрический сигнал, по параметрам которого судят о положении границы объекта, сходящийся оптический луч подвергают акустооптической модуляции, получают набор световых волн дифракционных порядков, объект вводят в область интерференции дифракционных порядков, расположенную вблизи их фокальной плоскости, об изменении положения границы объекта Δl судят по изменению фазы электрического сигнала Δϕ(Δl).
Теоретически получено и экспериментально подтверждено /4-6/, что при дифракции световой волны в акустооптическом модуляторе, работающем в режиме дифракции Рамана-Ната с малой амплитудой фазовой модуляции, за счет частичного перекрытия дифракционных порядков E(+1)-E(0) и E(-1)-E(0) образуются две пространственные интерференционные картины (области интерференции) с периодом Λ = λ/sinα, где α - угол дифракции световой волны в акустооптическом модуляторе. Эта интерференционная картина, освещая через диафрагму фотоприемник, приводит к формированию частотного электрического сигнала.
Введение контролируемого объекта на величину Δl с функцией пропускания Т=1(l-l0), где - 1(l-l0) - функция Хэвисайда, l0 - координаты границы объекта, в любой из крайних дифракционных порядков (E(+1), E(-1)) и дифракция этого порядка на границе объекта приводят к смещению интерференционной картины и дополнительному фазовому набегу Δϕ(Δl) частотного электрического сигнала.
Таким образом, сформированная пространственная интерференционная картина по сути является пространственно- чувствительной областью (чувствительной к пространственному смещению Δl границы объекта).
Данный способ позволяет повысить точность измерений за счет использования процесса дифракции света на границе объекта и соответственно преобразования смещения границы объекта Δl′ в изменение фазы электрического сигнала Δϕ(Δl).
Основным недостатком данного способа является малые размеры пространственно-чувствительных областей, что приводит к ограничению диапазона измерений. Поэтому в процессе измерений необходимо перемещать контролируемый объект относительно пространственно - чувствительной области, что ограничивает скорость измерений.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в расширении диапазона и скорости измерений.
Согласно изобретению указанный результат достигается тем, что в предлагаемом способе определения пространственного положения границы объекта, заключающемся в том, что формируют световой поток, который подвергают акустооптической модуляции, получают набор световых волн дифракционных порядков, объект вводят перпендикулярно направлению распространения светового потока в область интерференции дифракционных порядков, преобразуют световой поток, прошедший мимо границы объекта в электрический сигнал, об изменении контролируемого параметра границы объекта судят по изменению фазы электрического сигнала, дважды осуществляют как акустооптическую модуляцию в импульсном режиме, так и пространственную фильтрацию светового потока, импульсный режим акустооптической модуляции формируют при помощи периодической последовательности, состоящей из опорного и сканирующего бегущих акустических импульсов, набор световых волн дифракционных порядков, полученный при первой акустооптической модуляции, поворачивают вокруг своей оси и относительно своего первоначального направления распространения, при первой фильтрации светового потока выделяют часть области интерференции дифракционных порядков, прошедшей мимо границы объекта, и образуют из нее измерительную полосу, при второй фильтрации светового потока выделяют ненулевой дифракционный порядок из набора световых волн дифракционных порядков, полученных при второй акустооптической модуляции, о пространственном положении границы объекта в пределах измерительной полосы судят при одновременном осуществлении как первой акустооптической модуляции на опорном бегущем акустическом импульсе, так и второй акустооптической модуляции на сканирующем бегущем акустическом импульсе.
Полученные новые свойства от данной совокупности признаков ранее не были известны и достигается только в данном способе.
Работа способа поясняется графическим материалом.
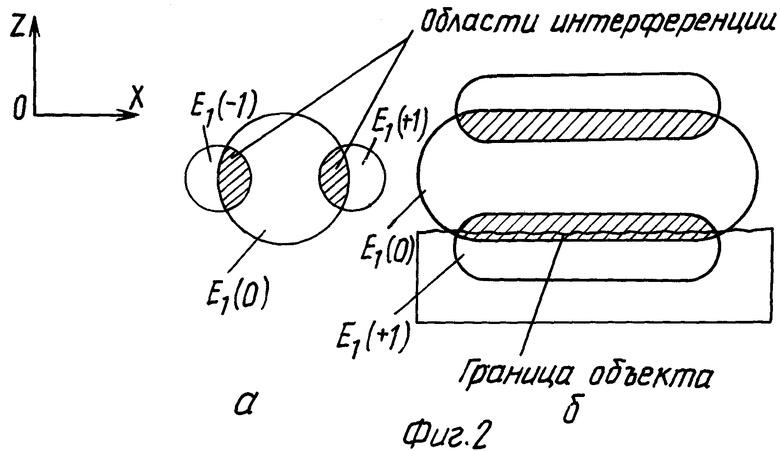
На фиг. 1 представлена схема устройства, поясняющая реализацию способа определения пространственного положения границы объекта.
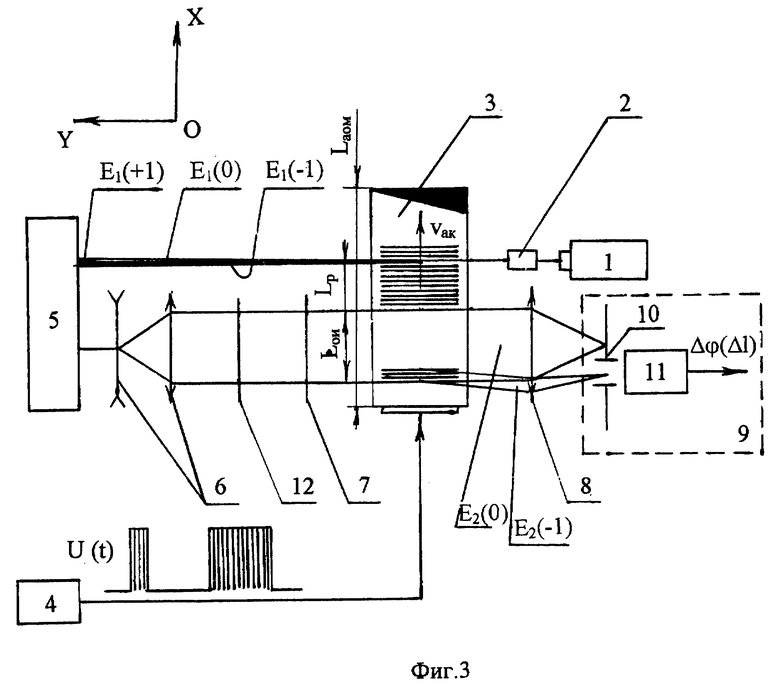
Фиг. 2 поясняет образование пространственных интерференционных картин в плоскости координат XOZ.
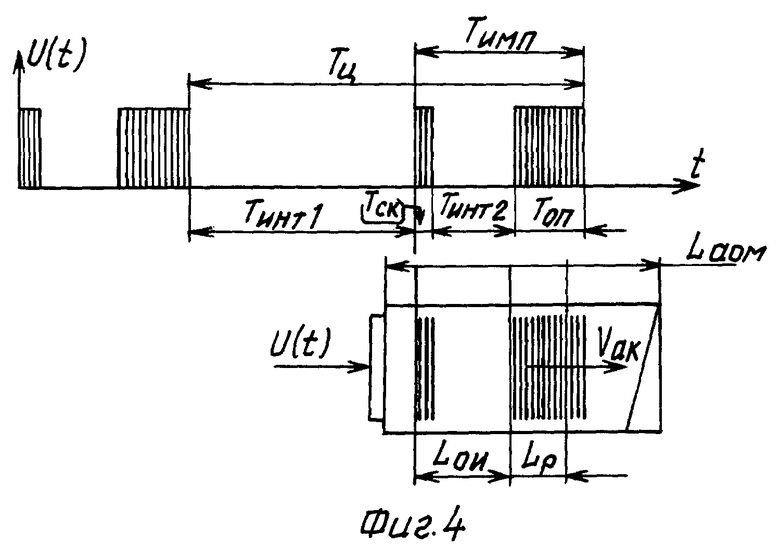
Фиг.3 приведена проекция схемы устройства в системе координат XOY.
На фиг. 4. изображена временная диаграмма электрического сигнала, поступающего на электрический вход акустооптического модулятора.
Устройство для определения пространственного положения границы объекта (фиг.1), реализующее заявляемый способ, состоит из следующих элементов: источник монохроматического излучения (лазер) 1, коллиматор 2, акустооптический модулятор (АОМ) 3, генератор импульсов 4, призма 5, оптическая система 6, щелевидная диафрагма 7, фокусирующая линза 8, измерительная схема 9, состоящая из диафрагмы 10 и фотоприемника 11.
Измерения производят в импульсном режиме и осуществляют следующим образом.
Излучение лазера 1 преобразуется коллиматором 2 в коллимированный световой поток, проходит через АОМ 3, следует на призму 5, в которой происходит поворот входного оптического потока приблизительно на 90o вокруг оси Y и приблизительно на 180o вокруг оси Z. Оптический поток на выходе призмы 5 проходит через оптическую систему 6 и щелевидную диафрагму 7, которые формирует световой поток в виде линии, параллельной оси Х (расширяет световой поток вдоль оси X), вторично следующий через АОМ 3.
Генератор импульсов 4 формирует периодическую импульсную последовательность с общим периодом Тц, состоящую из двух импульсов (фиг.4):опорного с длительностью Топ и сканирующего с длительностью Тск. Каждый из этих импульсов заполнен импульсами высокой частоты. Очередность следования импульсов на процесс измерения не влияет, в описании изобретения опорный будет первым, а сканирующий - вторым.
В общем случае частоты модуляции опорного и сканирующего импульсов могут быть различными fм1 ≠ fм2, тогда углы дифракции тоже будут разными α1≠ α2 Однако для упрощения условий функционирования предлагаемого способа и его описания принимаем fм = fм1 = fм2 и соответственно α = α1= α2.
Поступая на электрический вход АОМ 3, эти импульсы формируют на нем бегущие акустические импульсы. Пространственная ширина опорного импульса Lоп определяется как
Lоп= TопVак, (1)
где Tоп - длительность опорного импульса, Vак - скорость распространения акустических волн в акустооптическом модуляторе,
а сканирующего импульса - Lск= TскVак, (2)
где Tск - длительность сканирующего импульса.
Измерительным является промежуток времени, когда световой поток, следующий от коллиматора 2 через АОМ 3, дифрагирует на опорном акустическом импульсе, а световой поток после щелевидной диафрагмы 7 вторично проходит через АОМ 3 и дифрагирует на сканирующем акустическом импульсе.
Временные соотношения в периодической импульсной последовательности (длительности опорного Топ и сканирующего импульсов Тск, интервал между импульсами, длительность цикла Тц) и пространственные параметры оптической схемы (расстояние между световыми потоками, ширина светового потока на выходе щелевидной диафрагмы 7) подобраны так (фиг.4), чтобы дифракция на сканирующем импульсе осуществлялась во время, пока происходит дифракция на опорном акустическом импульсе.
Таким образом, в измерительный промежуток времени световой поток после коллиматора 2 проходит через АОМ 3 и дифрагирует на опорном акустическом импульсе вдоль оси X (для упрощения примем, что дифракция осуществляется только на первые порядки E1(+1), E1(0) и E1(-1)) (фиг.2,а).
Пространственный поворот светового потока после первой дифракции (дифракционные порядки E1(-1), E1(0) и E1(+1) (фиг.2а)) и их пространственная развертка оптической схемой 6 вдоль оси X приводит к формированию вытянутых интерференционных картин (фиг.2,б). Оптический поток, соответствующий областям перекрытия (областям интерференции) дифракционных порядков E1(+1) - E1(0), освещает границу объекта 12. Часть этого потока проходит далее через щелевидную диафрагму 7 и вторично через АОМ 3. В нем эта часть интерференционной картины дифрагирует на сканирующем акустическом импульсе Тск. Первые дифракционные порядки этой картины E2(+1), E2(-1) отклоняются на угол дифракции α в разные стороны относительно оси -Y. Минус первый E2(-1) следует через фокусирующую линзу 8, через диафрагму 10 на оптический вход фотоприемника 11 измерительной схемы 9.
Фотоприемник 11 измерительной схемы 9 преобразует разночастотный оптический сигнал в электрический сигнал Umsin[2πfм+Δϕ(Δl)] текущее значение набега фазы Δϕ(Δl) которого соответствует текущему, локальному положению границы объекта 12. Определяя отклонения значений набега фазы Δϕi(Δl) относительно исходно заданного, можно определить непрямолинейность границы объекта 12 - локальные смещения Δli относительно базовой линии (оси X).
В связи с тем, что акустооптическая (АО) дифракция в предлагаемом способе осуществляется в импульсном режиме, то необходимо выполнение следующих условий:
1) для исключения нежелательной АО-дифракции на импульсах от смежных циклов нужно обеспечить следующее условие:
Тц=Тинт1+Тимп=Тинт1+Топ+ Топт2+Tск ≥ Lаом/Vак, (3)
где Lаом - длина АОМ 3, Тинт1 - длительность интервала между импульсными последовательностями разных циклов, Тимп - длительность импульсной последовательности (Топ+Типт2+Тск), Тинт2 - длительность интервала между опорным и сканирующим импульсами;
2) первая и вторая АО-дифракции должны быть синхронизированы - моменты начала и конца первой и второй АО-дифракций должны совпадать, а их продолжительность должны быть равны
tдиф1 = tдиф2 (4)
Так как продолжительность первой АО-дифракции tдиф1 равна продолжительности опорного импульса Топ - выражение (1), a tдиф2 определяется (приближенно) временем пробегания сканирующего импульса через область интерференции - Lои/Vак (при условии, что Топ>>Тск), то имеем
Lоп/Vак=Топ≈Lои/Vак. (5)
В связи с тем, что в момент начала первой и второй АО- дифракций пространственная ширина опорного импульса Lоп равна расстоянию между областью интерференции и оптическим лучом, проходящим АОМ 3 при первой АО-дифракции - Lp (фиг. 3,4), и с учетом выражения (5) в окончательном виде получаем соотношения для пространственных параметров:
Lоп = Lp ≈ Lои, (6)
и для временных параметров схемы
Тинт2≈Топ (7)
Сущность способа заключается в следующем.
1. Первая акустооптическая модуляция на опорном акустическом импульсе приводит к АО-дифракции светового потока и формированию набора пространственно разнесенных на угол дифракции α разночастотных дифракционных порядков (круглой формы), например (для первых дифракционных порядков): E1(+1), E1(0) и E1(-1) (фиг. 2,а). Оптическая система разворачивает световой поток, состоящий из этих дифракционных порядков, пространственно разворачивает и преобразует его в световую линию, измерительную полосу. Частичное перекрытие дифракционных порядков формирует две линейно вытянутые области перекрытия, пространственно- чувствительные области (области интерференции) - E1(+1)-E1(0) и E1(0)-E1(-1)(фиг.2,б).
Введение границы объекта в одну из областей перекрытия, например E1(+1)-E1(0), приводит к дифракции обоих дифракционных порядков светового потока E1(+1) и E1(0) на границе объекта и к соответствующему смещению интерференционной картины.
2. Для регистрации образуемой интерференционной картины (области интерференции) в данном способе предлагается использовать импульсную акустооптическую пространственно-временную развертку, которая апробирована и исследована в /7,8/.
При пробегании сканирующего акустического импульса по АОМ в каждый момент дифрагируют лучи лишь того участка интерференционной картины, мимо которого он пробегает.
В результате АО-дифракции светового потока интерференционной картины на сканирующем акустическом импульсе формируется набор пространственно разнесенных на угол дифракции разночастотных дифракционных порядков, например E2(+1), E2(0) и E2(-1). Далее, проходя через фокусирующую линзу, каждый из порядков пространственно селектируется и собирается в определенной точке пространства. Диафрагма и фотоприемник измерительного канала могут устанавливаться в фокусе любого ненулевого (например, E2(-1)) и позволяют сформировать импульсный электрический сигнал, фаза которого в пределах импульса пропорциональна текущему, локальному отклонению траектории границы объекта от прямой линии (оси движения сканирующего акустического импульса) или пространственному положению границы объекта.
За счет того, что скорость акустических волн в АОМ может достигать значений (в зависимости от типа светозвукопровода) от 600 до 3600 м/с, то время измерений не превосходит долей микросекунд, таким образом, существенно повышается скорость измерений. Кроме этого, расширение геометрических размеров пространственно-чувствительной области (области интерференции) от точечной (≈1-2 мм) до линейной, ограниченной только размерами АОМ, расширяет диапазон измерений.
Источники информации
1. Патент США N 5193384, МКИ G 01 B 5/28, НКИ 73/105. Edge detecting system and method. Guggenberger Kurt E. 3аявл.26.09.90; Опубл. 16.03.93. (аналог).
2. А. с. N 1089404 (СССР), МКИ G 01 B 9/02, 11/02. Интерференционный способ определения положения границы объекта. Е.К. Чехович, Ю.Г. Буров// Опубл. в Б.И. -1984, N16. (аналог).
3. А.с.N 1714359 (СССР), МКИ G 01 В 21/00. Способ определения положения границы объекта. В.И.Телешевский, Н.Н.Абдикаримов // Опубл. в Б.И.-1992, N7. (прототип).
4. Телешевский В. И., Абдикаримов Н.Н. Гетеродинный лазерный акустооптоэлектронный сенсор для бесконтактного определения положения границ объектов //Фотометрия и ее метрологическое обеспечение: Тез. докл. 8 Всесоюзной научно-технической конференции. Москва, ноябрь 1990 г.-М., 1990.-с.242.
5. Телешевский В.И., Леун E.B., Абдикаримов Н.Н. Лазерный интерферометр для определения положения границы объектов. //Фотометрия и ее метрологическое обеспечение: Тез-докл. 12 Всесоюзной научно-технической конференции. Москва, февраль 1999 г.-M. 1999.-c.78.
6. Леун E.B., Абдикаримов H.Н., Загребельный В.Е. Метод определения формы границы объекта от зaдaннoй //Фотометрия и ее метрологическое обеспечение: Тез.докл. 12 Всесоюзной научно- технической конференция. Москва, февраль 1999 г.-М.,1999.-с.77.
7. А.с.N 1458703 (СССР), МКИ G 01 В 11/30. Способ контроля шероховатости поверхности изделия. Загребельный B.E., Телешевский В.И.// Опубл. в Б.И. -1986, N6.
8. Асташенков А.И., Лысенко B.Г., Прилепко М.Ю. Контроль топографии поверхности когерентным оптическим процессором. //11 НТК "Фотометрия и ее метрологическое обеспечение". Тезисы докладов. М.: ВНИИОФИ, 1996, с. 1996, с. 62.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ГРАНИЦЫ ОБЪЕКТА | 2000 |
|
RU2172470C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ГРАНИЦЫ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 2000 |
|
RU2175753C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕТАЛЕЙ | 1999 |
|
RU2158416C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЭЛЕМЕНТОВ ПОВЕРХНОСТЕЙ | 1999 |
|
RU2158414C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА СВЕТОВЫХ ВОЛН | 1991 |
|
RU2023982C1 |
| АКУСТООПТИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ СМЕЩЕНИЙ | 2002 |
|
RU2213935C1 |
| АКУСТООПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА | 1991 |
|
RU2020409C1 |
| СПОСОБ ПОДСЧЕТА ПОРЯДКА ИНТЕРФЕРЕНЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017061C1 |
| Способ управления фазовым сдвигом в интерференционных системах | 2016 |
|
RU2640963C1 |
Изобретение относится к области измерительной техники, а именно к лазерной интерферометрии, и может быть использовано для бесконтактного быстродействующего определения пространственного положения кромки, границы объекта, определения отклонения от прямолинейности этой кромки. В изобретении световой поток дважды подвергается акустооптической (АО) модуляции. Первичная АО модуляция на основе бегущего опорного акустического импульса позволяет сформировать пространственно-интерференционные картины в виде измерительной полосы, одной из которых освещается граница контролируемого объекта. Вторичная АО модуляция, формируемая бегущим сканирующим акустическим импульсом, позволяет произвести регистрацию, сканирование светового потока, прошедшего мимо границы контролируемого объекта. Формируемый электрический сигнал соответствует пространственному положению границы объекта и позволяет определить локальные смещения границы объекта в пределах измерительной полосы. Изобретение позволяет расширить диапазон и скорость измерений. 4 ил.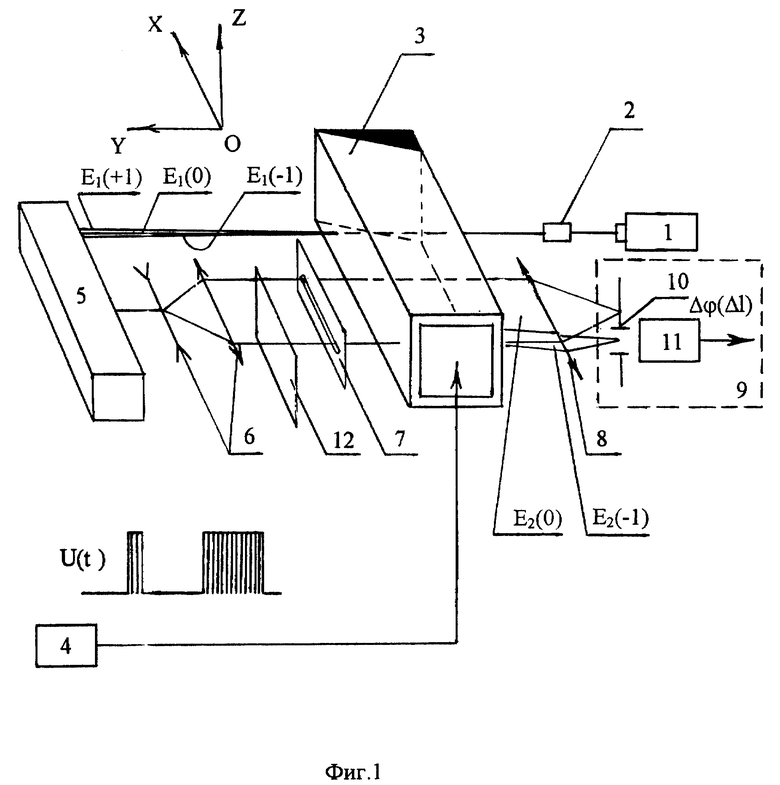
Способ определения пространственного положения границы объекта, заключающийся в том, что формируют световой поток, который подвергают акустооптической модуляции, получают набор световых волн дифракционных порядков, объект вводят перпендикулярно направлению распространения светового потока в область интерференции дифракционных порядков, преобразуют световой поток, прошедший мимо границы объекта в электрический сигнал, об изменении контролируемого параметра границы объекта судят по изменению фазы электрического сигнала, отличающийся тем, что акустооптическую модуляцию осуществляют дважды, используя при этом импульсный режим акустооптической модуляции, который формируют при помощи периодической последовательности, состоящей из опорного и сканирующего акустических импульсов, набор световых волн дифракционных порядков, полученный при первой акустооптической модуляции, поворачивают вокруг своей оси и относительно своего первоначального направления распространения, дважды осуществляют пространственную фильтрацию светового потока, причем при первой фильтрации светового потока выделяют часть области интерференции дифракционных порядков, прошедшей мимо границы объекта, и образуют из нее измерительную полосу, при второй фильтрации светового потока выделяют ненулевой дифракционный порядок из набора световых волн дифракционных порядков, полученных при второй акустооптической модуляции, о пространственном положении границы объекта в пределах измерительной полосы судят при одновременном осуществлении как первой акустооптической модуляции на опорном акустооптическом импульсе, так и второй акустооптической модуляции на сканирующем акустическом импульсе.
| Способ определения положения границы объекта | 1989 |
|
SU1714359A1 |
| US 5193384 А, 16.03.1993 | |||
| Интерференционный способ определения положения границы объекта | 1981 |
|
SU1089404A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Способ измерения пространственных перемещений объекта | 1988 |
|
SU1610252A1 |
