Предлагаемое изобретение относится к области измерительной техники, а именно к лазерной интерферометрии, и может быть использовано при определении следующих пространственных параметров: направлений движения (поворота), значений смещений Δl (поворотов Δγ), линейной скорости Δl/Δt (угловой скорости Δγ/Δt) границ объектов, при определении отклонений форм границы объекта: отклонений от прямолинейности, отклонений отверстий от заданной формы (круглого, овального, квадратного сечения), размеров щелей, зазоров; при контроле за износом и направлением движения резцов на металлорежущих станках.
Известен бесконтактный способ определения положения кромки предмета /1/ (аналог), заключающийся в получении теневой проекции предмета на расположенном в плоскости изображения объектива сканирующем фотопреобразователе, например на приборе с зарядовой связью, преобразовании теневой проекции в видеоимпульс и определении измеряемого размера по положению фронта видеоимпульса, видеоимпульсы интегрируют, по крайней мере, в пределах его фронта, измеряют амплитуду видеоимпульса, определяют положение фронта относительно конца интервала по отношению величины полученного интеграла к амплитуде видеоимпульса, измеряемый размер определяют как сумму положения фронта относительно конца интервала и оставшейся части видеоимпульса.
Недостатком этого способа является ограничение быстродействия процесса измерения, связанное с необходимостью перемещения контролируемого объекта относительно объектива устройства.
Известен способ определения границы объекта /2/ (аналог), который заключается в том, что формируют световой луч, объект вводят в световой луч перпендикулярно направлению распространения луча, преобразуют световой поток, прошедший мимо кромки объекта в электрический сигнал, по параметрам которого судят о положении границы объекта, сходящийся оптический луч подвергают акустооптической модуляции, получают набор световых волн дифракционных порядков, объект вводят в область интерференции дифракционных порядков, расположенную вблизи их фокальной плоскости, об изменении положения границы объекта Δl судят по изменению фазы электрического сигнала ΔΦ(Δl).
Установлено /3/, что при дифракции световой волны в акустооптическом модуляторе, работающим в режиме дифракции Рамана-Ната с малой амплитудой фазовой модуляции, за счет частичного перекрытия дифракционных порядков E+1-E0 и E-1-E0 образуются две пространственные области интерференции с периодом  где α- угол дифракции световой волны в акустооптическом модуляторе. Любая из этих областей интерференции освещая через диафрагму фотоприемник приводит к формированию частотного электрического сигнала.
где α- угол дифракции световой волны в акустооптическом модуляторе. Любая из этих областей интерференции освещая через диафрагму фотоприемник приводит к формированию частотного электрического сигнала.
Введение контролируемого объекта с функцией пропускания T=l(l-l0), где l(l-l0) - функция Хэвисайда, l0 - координаты границы объекта, на величину Δl в любой из крайних дифракционных порядков (E+1 и E-1) приводят к дифракции этого порядка на границе объекта, смещению интерференционной картины и дополнительному фазовому набегу ΔΦ(Δl) частотного электрического сигнала. Значение фазового набега ΔΦ(Δl) определяется следующим соотношением:
где  период пространственной интерференционной картины, формируемой в области интерференции, Δl- смещение границы объекта.
период пространственной интерференционной картины, формируемой в области интерференции, Δl- смещение границы объекта.
Данный способ позволяет повысить точность измерений за счет использования процесса дифракции света на границе объекта и, соответственно, преобразовании смещения границы объекта Δl в изменение фазы электрического сигнала ΔΦ(Δl),.
Однако его точность измерений и функциональные возможности ограничены из-за пространственной селективной чувствительности и необходимости подстраивать направление перемещения объекта под направление максимальной чувствительности. Кроме того, недостатком является ограничение быстродействия процесса измерения, связанное с необходимостью перемещения контролируемого объекта относительно устройства.
Наиболее близким по технической сущности к предлагаемому является способ определения пространственных параметров границы объекта /4/ (прототип), который заключается в том, что формируют световой поток, который подвергают акустооптической модуляции, получают измерительный поток в виде набора разночастотных дифракционных порядков, формируют измерительный канал, в котором создают область интерференции, объект вводят перпендикулярно направлению распространения измерительного потока и освещают областью интерференции границу объекта, часть которой направляют на фотоприемник, с помощью которого формируют электрический сигнал, об изменении положения границы объекта судят по изменению фазы этого сигнала, пространственно выводят из измерительного потока разночастотные дифракционные порядки, за исключением одного, представляющего собой неподвижный оптический поток, а с помощью одного из выведенных разночастотных дифракционных порядков формируют подвижный оптический поток, при этом область интерференции создают пространственно совмещая подвижный и неподвижный оптические потоки, изменяют пространственное положение подвижного оптического потока, перемещают область интерференции вдоль границы объекта, а о пространственных параметрах границы объекта судят как по изменению фазы, так и по параметрам пространственного положения подвижного оптического потока.
Достоинствами способа-прототипа являются расширение функциональных возможностей, повышение точности и скорости измерений.
Однако его существенным недостатком является ограничение диапазона измерений, определяемое диаметром фотоприемника, который для высокочастотных фотоприемников обычно не превышает 1,5-3 мм.
Предлагаемое изобретения направлено на достижение технического результата, заключающегося в расширении диапазона измерений.
Согласно изобретению указанный результат достигается тем, что в предлагаемом способе определения пространственных параметров границы объекта, заключающийся в том, что формируют световой поток, который подвергают акустооптической модуляции, получают измерительный поток в виде набора разночастотных дифракционных порядков, формируют измерительный канал, в котором создают область интерференции, объект вводят перпендикулярно направлению распространения измерительного потока и освещают областью интерференции границу объекта, часть которой направляют на фотоприемник, с помощью которого формируют электрический сигнал, об изменении положения границы объекта судят по изменению фазы этого сигнала, пространственно выводят из измерительного потока разночастотные дифракционные порядки, за исключением одного, представляющего собой первый оптический поток, а с помощью одного из выведенных разночастотных дифракционных порядков формируют второй оптический поток, при этом область интерференции создают пространственно совмещая первый и второй оптические потоки, изменяют пространственное положение второго оптического потока, перемещают область интерференции вдоль границы объекта, а о пространственных параметрах границы объекта судят как по изменению фазы, так и по параметрам пространственного положения второго оптического потока, световой поток и его акустооптическая модуляция формируются в синхронных импульсных режимах, причем импульсный режим последней состоит из набора тактов, с линейно изменяющимися значениями фазы акустической волны, а в качестве фотоприемника используют матрицу фотоэлементов.
Полученное новое качество от данной совокупности признаков ранее не было известно и достигается только в данном способе.
Работа способа поясняется рисунками.
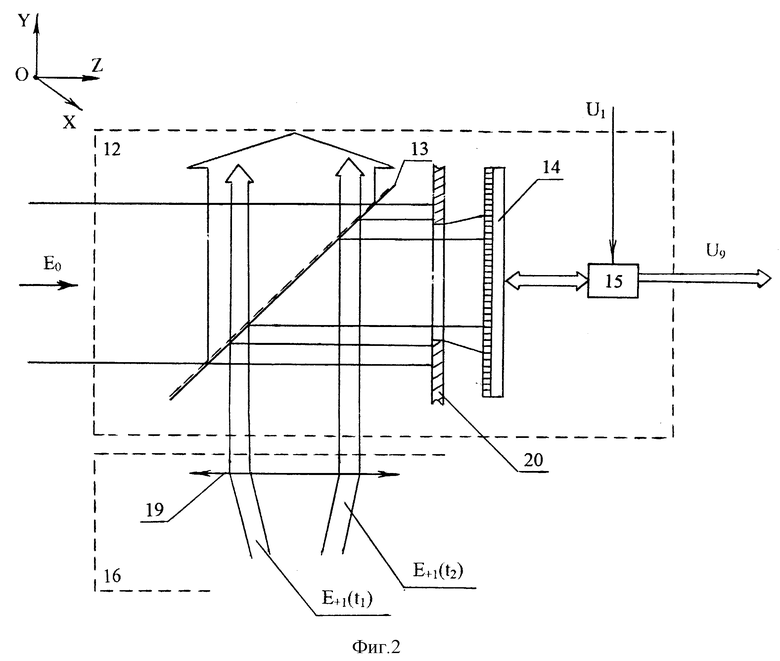
На фиг. 1 представлена схема устройства, реализующего заявляемый способ, при определении пространственного положения границы объекта, а на фиг. 2 - измерительный канал устройства при контроле формы отверстия.
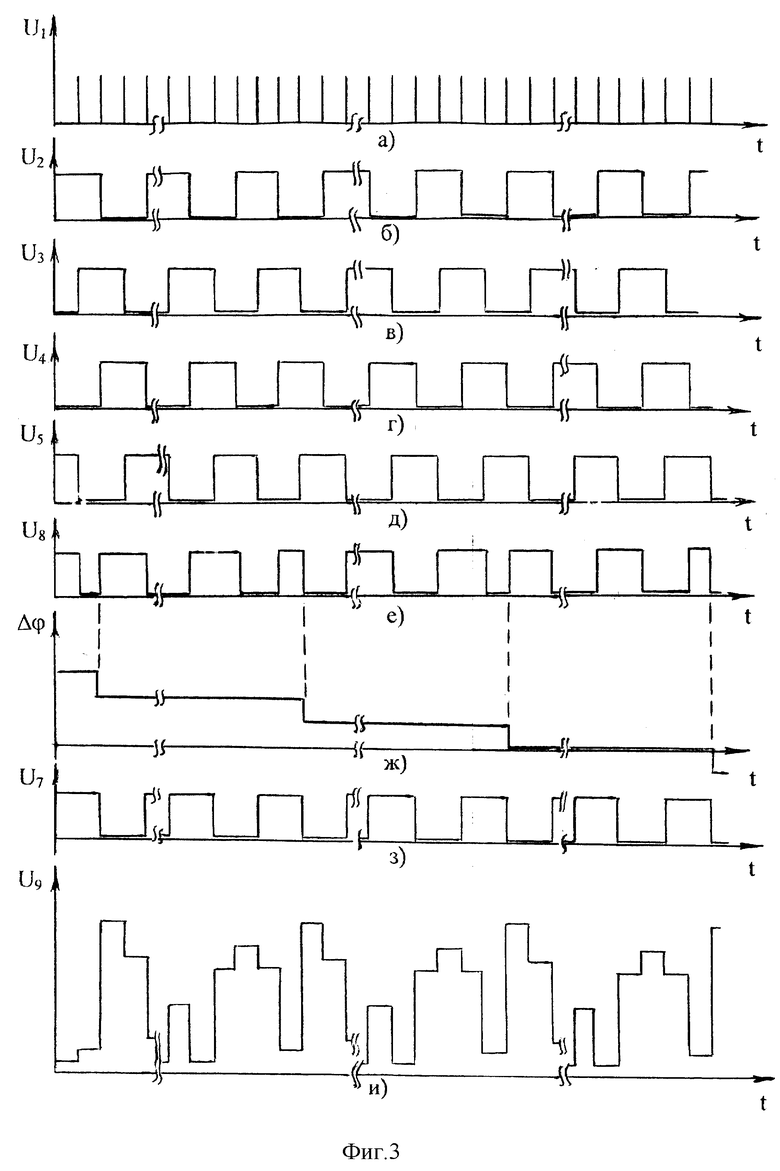
Фиг. 3 иллюстрирует временные диаграммы работы устройства.
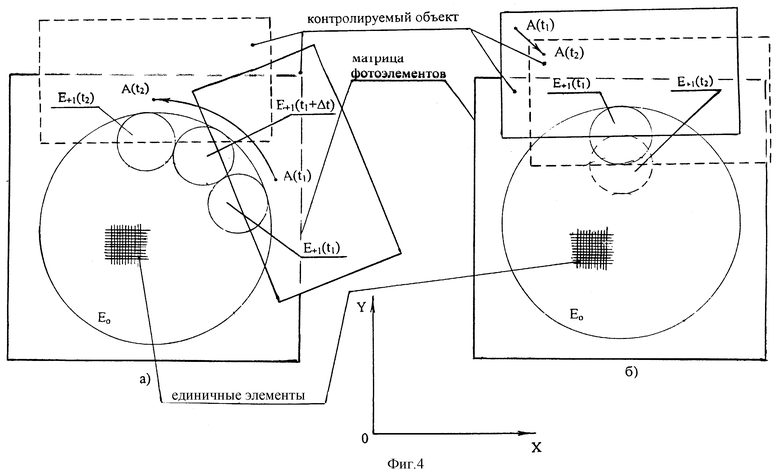
На фиг. 4 изображена пространственная диаграмма, поясняющая работу устройства при определении пространственного положения границы объекта.
Фиг. 5 демонстрирует пространственную диаграмму, поясняющую работу устройства при контроле формы отверстия.
Устройство для определения смещений границы объекта (фиг. 1), реализующее заявляемый способ, состоит из следующих элементов: импульсный лазер 1, объектив 2, акустооптический модулятор (АОМ) 3, объективы 4 и 5, устройство управления (УУ) 6, состоящее из генератора 7, расщепителя фазы 8, переключателя фазы 9, делителя частоты 10, формирователя импульсов 11; измерительный канал 12, состоящий из светоделителя 13, матрицы фотоэлементов (ПЗС-матрицы) 14, блока управления ПЗС-матрицой 15; пространственный модулятор света 16, состоящий из зеркала 17 и пьезоэлемента 18 и объектива 19.
Измерения осуществляют следующим образом.
Излучение импульсного лазера 1 с помощью объектива 2 формируется в виде перетяжки в зоне акустооптического взаимодействия АОМ 3 и дифрагирует в режиме Брэгга на два дифракционных порядка E+1 и E0. Первый дифракционный порядок E+1 отклоняется от прямолинейного направления на угол дифракции α, проходит через объектив 4 и коллимированным пучком следует на пространственный модулятор света 16.
Генератор 7 формирует электрический сигнал U1 = U1msin2πft (фиг. 3а), который поступает на входы расщепителя фазы 8, делителя частоты 10, блока управления ПЗС-матрицой 15 и на первый выход устройства. На выходе расщепителя фазы 8 создается набор сигналов (фиг. 3 б,в,г,д) со сдвигом фазы ΔΦ на 90o:
U2 = U2msin2πfмt, (2)
U3 = U3msin(2πfмt+90°); (3)
U4 = U4msin(2πfмt+180°), (4)
U5 = U5msin(2πfмt+270°), (5)
где U2m=U3m=U4m=U5m - амплитуда сигналов; fм - частота модуляции АОМ.
Делитель частоты 10 на своем выходе генерирует сигнал U6, управляющий работой переключателя фазы 9 и формирователя импульсов 11, причем последний формирует сигнал U7 с частотой fк, обеспечивающий синхронный запуск импульсного лазера 1. Коэффициент деления формирователя импульсов 11 определяется необходимой частотой следования импульсов света импульсного лазера 1. Переключатель фазы 9 осуществляют последовательную циклическую коммутацию сигналов в следующем порядке: U5--->U4---> U3--->U2--->U5--->...и формирует сигнал U8. Фаза ΔΦ сигнала U8 синхронно относительно сигнала U1 дискретно уменьшается (фиг. 3ж). Такой режим работы блока УУ 6, как показано ниже, позволяет уменьшить частоту первой гармоники информационного сигнала.
В результате электрический сигнал U1, поступая на вход блока управления ПЗС-матрицы 15, синхронизирует процессы фотопреобразования и передачи сигнала с выхода ПЗС-матрицы 14 на второй выход устройства.
Нулевой дифракционный порядок E0 (первый оптический поток) после АОМ 3 проходит через объектив 4 и коллимированным пучком следует на первый оптический вход измерительного канала 5, проходит сквозь светоделитель 6 и освещает (на фиг. 4а - границу объекта при его повороте, а на фиг. 4б - границу объекта при его смещении, фиг. 5 - отверстие) объекта 20.
В процессе измерения первый дифракционный порядок Е+1 (второй оптический поток) открывается от прямолинейного направления на угол дифракции α и следует на оптический вход пространственного модулятора света 16. Отразившись от зеркала 17 этот оптический поток проходит через объектив 19 и направляется на второй оптический вход измерительного канала 12. Там он попадает на светоделитель 13, после которого часть его следует вместе с первым оптическим потоком в направлении объекта 20.
Пространственный модулятор света 16 представляет собой зеркальный пьезокерамический дефлектор, состоящий из пьезоэлемента 18 и зеркала 17, закрепленного на нем. При подаче напряжений ΔUx(t) и ΔUy(t) пьезоэлемент 18 изгибается по соответствующей координате и отклоняет зеркало 17 /5/, которое, в свою очередь, отклоняет дифракционный порядок E+1. Отклонение зеркала 17 приводит к угловому отклонению Δβ дифракционного порядка E+1, который проходя через объектив 19 линейно смещается. Формируя электрические сигналы ΔUx(t) и ΔUy(t) нужной амплитуды и в нужной временной последовательности задают соответствующую пространственную развертку дифракционного порядка E+1.
Положение пространственного модулятора света 16 и угол отражения света в нем подобраны такими, чтобы дифракционные порядки E+1 и E0 в светоделителе 13 пространственно совмещаются под постоянным и малым углом γ ≪ α. Наличие/отсутствие и пространственное положение объектива (фокуса объектива) 19 определяется типом, размерами (внутренние/внешние) детали и принципиально не влияет на алгоритм функционирования предлагаемого способа.
Пространственное совмещение первого оптического потока (дифракционного порядка E0) и второго оптического потока (дифракционного порядка E+1) приводит к образованию подвижной области интерференции, которая используется в качестве пространственно чувствительной области (фиг. 4, 5). Образовавшаяся область интерференции освещает границу объекта 20, на которой происходит дифракция интерферирующих оптических порядков. В результате этого пространственная интерференционная картина следует ПЗС-матрицу 14.
Процесс преобразования входного изображения заключается в последовательном преобразовании сигналов фотоэлементов всей матрицы и переносе сформированного заряда.
Оптическое гетеродинирование разночастотных потоков на входе каждого фотоэлемента приводит к появлению электрического заряда Oij, где i, j-номера строк и столбцов фотоэлементов ПЗС-матрицы 14. Покадровый опрос и перенос всех зарядов на выход ПЗС-матрицы 14 формирует дискретный по времени электрический сигнал U9 (фиг. 3и). Этот сигнал представляет собой временную развертку двумерной интерференционной картины, соответствующей текущему положению границы объекта, и передается на второй выход устройства. В зависимости от типа используемой ПЗС-матрицы 14 выходная шина может состоять как из одного, так и нескольких сигнальных выходов /6-8/.
Входное изображение на входе ПЗС-матрицы 14 представляет собой пространственную интерференционную картину, причем в ее каждой локальной точке создается сложный дискретный спектр периодического сигнала C(k2πf0), где k= 0, ±1, ±2, ... Наилучшие условия для выделения информационной составляющей путем частотной фильтрации имеются у первой гармоники C(2πf0), которая определяется как f0 = fк/N, где fк - частота коммутации фазы, N - число тактов изменений фазы сигнала /9/.
Частотная характеристика, определяемая естественной инерционностью фотоэлементов ПЗС-матрицы 14 соответствует фильтру низких частот. Следовательно, наилучшим, с точки зрения частотных требований, предъявляемых к ПЗС-матрице, является выполнение условия, когда f1<fфнч<f2, где f1 = f0 и f2 = 2f0 - частоты первой и второй гармоник дискретного спектра периодического сигнала, fфнч - частота среза фильтра низких частот, определяемая естественной инерционностью фотоэлементов ПЗС-матрицы 14. Выполнение этого условия позволяет осуществить естественную фильтрацию первой гармоники информационного сигнала на стадии фотоэлектрического преобразования.
Таким образом, искомый фазовый набег ΔΦ(Δl) определяется при использовании современных компьютерных методов обработки сигналов по следующему алгоритму:
Во-первых, на основе полученного сигнала U9 восстанавливается в цифровом виде интерференционная картина.
Во-вторых, методами цифровой фильтрации выделяется первая гармоника оптического сигнала, которая определяется частотными параметрами измерительной схемы.
В третьих, осуществляется определение фазового набега ΔΦ(Δl), характеризующего текущее пространственное положение (смещение, поворот и т.д.) границы объекта, по которому в зависимости значений от управляющих сигналов ΔUx(t) и ΔUy(t) определяется отклонение положения границы объекта от заданного.
Представленное описание работы устройства составлено для дифракции света в режиме Брэгга, однако осуществление способа не изменится и при использовании режима дифракции Рамана-Ната.
Сущность способа заключается в следующем.
1. Для увеличения диапазона измерений предлагается фотоприемник заменить на ПЗС-матрицу. При этом в связи с тем, что процесс считывания неподвижной области интерференции, формируемой на входе ПЗС-матрицы, является дискретным, покадровым, то для исключения потери информации частота опроса каждого фоточувствительного элемента fпзс должна удовлетворять неравенству Котельникова fпзс≥2fмод, fмод - частота акустооптической (АО) модуляции. Если область интерференции на входе ПЗС-матрицы - подвижная, то значение fпзс будет определяться скоростью перемещений области интерференции и превышение fпзс над fмод значительно возрастает. Так как частота АО-модуляции для твердотельных модуляторов (например типа МЛ-201) составляет 20-80 МГц, то, соответственно, для подвижной области интерференции на входе ПЗС-матрицы к значению частоты опроса fпзс предъявляются практически невыполнимые на сегодняшний день требования /6-8/.
Для устранения указанного противоречивого условия предлагается использовать режим гетеродинирования с импульсным освещением и синхронным ступенчатым изменением фазы напряжения, управляющего работой АОМ /9/. При таком режиме происходит подавление несущей частоты (балансная модуляция) и перенос спектра сигнала в область низких частот, что позволяет считывать амплитуду и фазу высокочастотных световых полей фотоприемником с относительно невысоким быстродействием. Далее обработкой полученного электрического сигнала U9 путем разложения в ряд Фурье выбранная спектральная компонента легко выделяется известными методами цифровой фильтрации /10/.
Так при экспериментах с использованием импульсного полупроводникового лазера ИЛПИ-2-7К-А (λ = 0,67 мкм, fк≈565 кГц), АОМ типа МЛ-201 с частотой модуляции 75 МГц и частотой коммутации фазы 18,3 кГц первая гармоника оптического сигнала составляла всего ≈4,6 кГц /9/.
2. При пространственном совмещении первого и второго оптических потоков под углом γ формируется область интерференции с шагом  Структура ПЗС-матрицы с размерами фотоэлементов a≈b похожа на сеточный растр (раст с квадратными прозрачными элементами) /11/, поэтому для помехоустойчивого преобразования интерференционного сигнала нужно обеспечить условие:
Структура ПЗС-матрицы с размерами фотоэлементов a≈b похожа на сеточный растр (раст с квадратными прозрачными элементами) /11/, поэтому для помехоустойчивого преобразования интерференционного сигнала нужно обеспечить условие:
Тогда при использовании источника света с λ ≈ 0,6 мкм и ПЗС-матрицы типа ТН7896М (a≈b≈20 мкм) /6/ получается, что γ≅0,01 рад.
Для управления отклонением второго оптического потока могут использоваться не только пьезодефлектор, но и двумерный акустооптический дефлектор, модулятор, построенные на других принципах действия /13-15/.
Методика определения отклонения от круглости отверстия предлагаемым способом заключается в том, что деталь с отверстием устанавливают в подготовленную оснастку так, что отверстие было полностью освещено первым оптическим потоком. Затем, осуществляя круговое вращение с помощью пространственного модулятора второго оптического потока, осуществляют сканирование границы этой детали и, соответственно, преобразование оптического сигнала в цифровой код N(Δl). В дальнейшем после его обработки преобразованием Фурье и методами цифровой фильтрации определяют текущее отклонение положения границы детали от заданной траектории.
Источники информации, используемые при составлении описания
1. А.с. N 1068702 (СССР), МКИ G 01 B 11/24. Бесконтактный способ определения положения кромки предмета. И.А.Аронов, Э.Ш.Зельман //Опубл. в Б.И. - 1984, N 3 (аналог).
2 А.с. N 1714359 (СССР), МКИ G 01 B 21/00. Способ определения положения границы объекта. В.И.Телешевский, Н.Н.Абдикаримов //Опубл. в Б.И. - 1992, N 7 (аналог).
3. Телешевский В. И., Абдикаримов Н.Н. Гетеродинный лазерный акустооптоэлектронный сенсор для бесконтактного определения положения границ объектов. //Фотометрия и ее метрологическое обеспечение: Тез. докл. 8 Всесоюзный научно-технической конференции. Москва, ноябрь 1990 г. - М., 1990. - с. 242.
4. Леун Е.В. Перестраиваемые акустооптические датчики для измерения параметров вибрации. Омский научный вестник, Омск, март 1999, выпуск 6, с. 42-44 (прототип).
5. Якушкин С. В., Суханов И.И., Троицкий Ю.В. Измерение и стабилизация направления оси лазерного пучка. Приборы и техника эксперимента, 1987, N 4, с. 181-183.
6. Каталог оптоэлектронных комплектующих ф. Thomson-CSF, Yolland, 1994-1995.
7. Jmage sensing and solid camera Products 1994/1995. EG & G Optoelectronics Reticon, California.
8. Аварзад О. Видеопреобразователь на основе фотоприемной матрицы с зарядовой связью типа К1200ЦМ7. Дубна, ОИЯИ, 1994.
9. Твердохлеб П.Е., Штейнберг И.Ш., Шепеткин Ю.А. Способ гетеродинного детектирования импульсных световых сигналов. Автометрия, 1999, N 5, с. 41-51.
10 Прэтт У. Цифровая обработка изображений: В. 2 т.: Пер. с англ. - М.: Мир, 1982, - Т. 1,2.
11. Преснухин Л.Н., Майоров С.А., Меськин И.В. Фотоэлектрические преобразователи. /Под ред. Л.Н. Преснухина. М., 1974, 376 с.
12. Иванов В. А. , Привалов В.Е. Применение лазеров в приборах точной механики. - СПб.: Политехника, 1993. - 216 с.
13. Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. - М.: Радио и связь, 1985. - 280 с.
14. Мустель Е.Р., Парыгин В.Н. Методы модуляции и сканирования света. М. : Наука, 1970. 295 с.
15. Мазуров М.Е., Обухов В.И. Оптические модуляторы и устройства отклонений луча. М.: 1970, 140 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ГРАНИЦЫ ОБЪЕКТА | 1999 |
|
RU2157964C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ГРАНИЦЫ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157963C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕТАЛЕЙ | 1999 |
|
RU2158416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ | 2000 |
|
RU2175753C1 |
| АКУСТООПТИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ СМЕЩЕНИЙ | 2002 |
|
RU2213935C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА СВЕТОВЫХ ВОЛН | 1991 |
|
RU2023982C1 |
| ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2223462C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЭЛЕМЕНТОВ ПОВЕРХНОСТЕЙ | 1999 |
|
RU2158414C1 |
| СПОСОБ ПОДСЧЕТА ПОРЯДКА ИНТЕРФЕРЕНЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017061C1 |
| АКУСТООПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА | 1991 |
|
RU2020409C1 |

Изобретение относится к области измерительной техники, а именно к лазерной интерферометрии. Сущность изобретения: в схеме формируются разночастотные дифракционные порядки - первый (неподвижный) и второй (подвижный) оптические потоки. Их пространственное совмещение позволяет создать управляемую пространственно-чувствительную область интерференции, с помощью которой сканируется, исследуется граница контролируемого объекта, приводящая к дифракции этих порядков, с помощью цифрового кода текущего фазового набега судят о пространственных параметрах этой границы, в т.ч. о параметрах движения/поворота и/или отклонений ее формы от заданной. Технический результат: увеличение диапазона измерений в предлагаемом способе. 5 ил.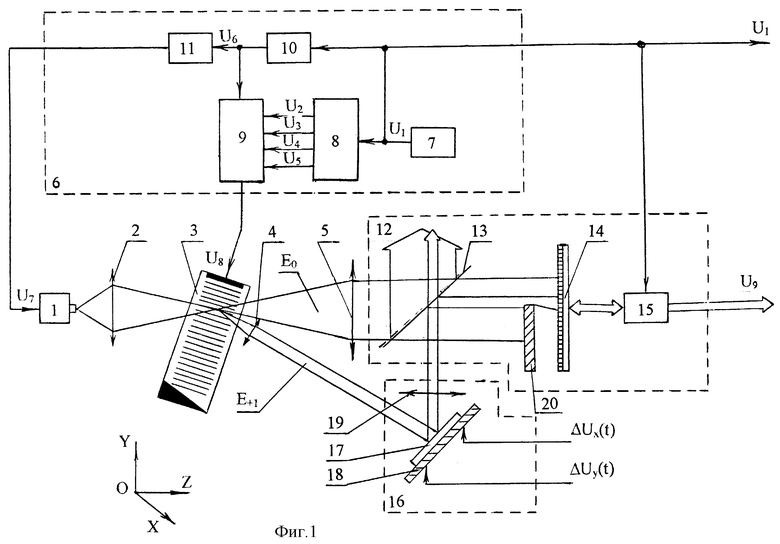
Способ определения пространственных параметров границы объекта, заключающийся в том, что формируют световой поток, который повергают акустооптической модуляции, получают измерительный поток в виде набора разночастотных дифракционных порядков, формируют измерительный канал, в котором создают область интерференции, объект вводят перпендикулярно направлению распространения измерительного потока и освещают областью интерференции границу объекта, часть которой направляют на фотоприемник, с помощью которого формируют электрический сигнал, об изменении положения границы объекта судят по изменению фазы этого сигнала, пространственно выводят из измерительного потока разночастотные дифракционные порядки, за исключением одного, представляющего собой первый оптический поток, а с помощью одного из выведенных разночастотных дифракционных порядков формируют второй оптический поток, при этом область интерференции создают пространственно совмещая первый и второй оптические потоки, изменяют пространственное положение второго оптического потока, перемещают область интерференции вдоль границы объекта, а о пространственных параметрах границы объекта судят как по изменению фазы, так и по параметрам пространственного положения второго оптического потока, отличающийся тем, что световой поток и его акустооптическая модуляция формируются в синхронных импульсных режимах, причем импульсный режим акустооптической модуляции состоит из набора тактов, с линейно изменяющимися значениями фазы акустической волны, а в качестве фотоприемника используют матрицу фотоэлементов.
| Способ определения положения границы объекта | 1989 |
|
SU1714359A1 |
| ШТАНГЕНИНСТРУМЕНТ ДЛЯ ЛИНЕЙНЫХ ИЗМЕРЕНИЙ | 0 |
|
SU274386A1 |
| Устройство для измерения напряженности электрического поля | 1987 |
|
SU1493967A1 |
