Изобретение относится к средствам вооружения для широкого класса военных самолетов и в частности для многофункциональных истребителей.
Одной из задач, решаемых средствами вооружения военных самолетов, является задача поражения визуально видимых и в частности высокоманевренных воздушных целей. Для многофункциональных истребителей это задача ближнего маневренного воздушного боя. Для самолетов других типов эта задача обороны.
Один из путей решения указанных задач состоит в использовании авиационных управляемых ракет с головками самонаведения, в качестве средств поражения, нашлемных целеуказателей для визирования целей и выдачи целеуказания, высокоточных оптиколокационных систем с лазерным дальномером для информационного обеспечения пуска с высокой вероятностью поражения.
Эти системы описаны в:
- книге "Боевая авиационная техника: Авиационное вооружение" (Д.И. Гладков и др.) М.: Воениздат, 1987 г., с. 218,
- книге "Су-27", POLYGON - авиационная серия Красный флаг для моделистов, Москва, 1993 г.
Недостатки существующих систем этого типа состоят в их низкой помехозащищенности, ограничениях на применение, связанных с возможностями оптиколокационной станции с лазерным дальномером, а также значительным временем, необходимым для перенацеливания в ближнем воздушном бою.
Сущность изобретения.
В основу изобретения положено решение следующих задач:
- повышение помехозащищенности системы путем формирования и использования в системе признака устойчивого захвата головки самонаведения авиационной управляемой ракеты, получаемого на основе логической обработки сигналов головки самонаведения,
- оперативное перенацеливание авиационной управляемой ракеты с использованием нашлемного целеуказателя за счет определенной логики управления головкой самонаведения.
Поставленная в первой и второй задачах цель достигается тем, что в оптикоэлектронную прицельную систему самолета, содержащую последовательно соединенные прицельный элемент, формирователь целеуказания авиационной управляемой ракете и головку самонаведения авиационной управляемой ракеты, введены оптиколокационная станция с лазерным дальномером, первый вход которой соединен с выходом блока нашлемного целеуказания и прицеливания, используемого в качестве прицельного элемента, первый выход - со вторым входом формирователя целеуказания авиационной управляемой ракете, второй выход - с третьим входом формирователя целеуказания авиационной управляемой ракете и первым входом блока нашлемного целеуказания и прицеливания, кнопка разрешения захвата цели, управляемая летчиком, соединенная со вторым входом оптиколокационной станции с лазерным дальномером, формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, вход которого соединен с выходом головки самонаведения авиационной управляемой ракеты, а выход - со вторым входом блока нашлемного целеуказания и прицеливания, блок управления режимами работы головки самонаведения авиационной управляемой ракеты с возможностью перенацеливания, входы которого соединены с кнопкой разрешения захвата цели, управляемой летчиком, формирователем признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты и вторым выходом оптиколокационной станции с лазерным дальномером, а первый и второй выходы соединены со вторым и третьим входами головки самонаведения авиационной управляемой ракеты соответственно, причем формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты выполнен с возможностью функционирования при кратковременных сбросах захвата головкой самонаведения авиационной управляемой ракеты.
Формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты выполнен в виде первого блока запоминания, вход и выход которого являются входом и выходом блока соответственно, первого блока памяти, последовательно соединенных первого логического элемента НЕ, счетчика и первого компаратора, причем вход блока соединен со входом первого логического элемента НЕ, второй вход первого компаратора соединен с первым блоком памяти, а выход - с управляющим входом первого блока запоминания.
Блок управления режимами работы головки самонаведения авиационной управляемой ракеты с возможностью перенацеливания выполнен в виде последовательно соединенных логического элемента ИЛИ и второго блока запоминания, последовательно соединенных второго логического элемента НЕ, первого логического элемента И и элемента задержки, выход которого соединен с управляющим входом второго блока запоминания, причем входы логического элемента ИЛИ - первый и третий входы блока, второй вход первого логического элемента И - второй вход блока, выход второго блока запоминания - выход блока.
Сведения, подтверждающие возможность осуществления изобретения.
Возможность осуществления изобретения иллюстрируется на примере оптикоэлектронной прицельный системы многофункционального истребителя. Этот пример не должен рассматриваться ни как ограничивающий объем изобретения, ни как предпочтительная для всех случаев форма его реализации.
Блок-схема устройства представлена на чертеже.
Устройство содержит блок 1 нашлемного целеуказания и индикации, оптиколокационную станцию 2 с лазерным дальномером, кнопку 3 разрешения захвата цели, управляемую летчиком, головку самонаведения авиационной управляемой ракеты 4, формирователь целеуказания авиационной управляемой ракете 5, формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты 6, блок 7 управления режимами работы головки самонаведения авиационной управляемой ракеты с возможностью перенацеливания.
Блок 6 содержит первый блок запоминания 8, блок памяти 9, первый логический элемент НЕ 10, счетчик 11 и компаратор 12.
Блок 7 содержит логический элемент ИЛИ 13, второй блок запоминания 14, второй логический элемент НЕ 15, логический элемент И 16 и элемент задержки 17.
Блок 1 соединен с блоками 2 и 5. Второй и третий входы блока 5 соединены с первым и вторым выходами блока 2, выход блока 5 соединен с первым входом блока 4, выход которого соединен со входами блоков 8, 10. Выход блока 10 соединен с блоком 11, выход которого соединен с блоком 12, второй вход которого соединен с блоком 9, а выход - с управляющим входом блока 8. Блок 3 соединен со вторым входом блока 2 и первым входом блока 13, второй вход которого соединен со вторым выходом блока 2, а выход - с блоками 14, 15. Выход блока 15 соединен со входом блока 16, второй вход которого соединен с блоком 8, а выход - с блоком 17 и вторым входом блока 4. Выход блока 17 соединен с управляющим входом блока 14, выход которого соединен с третьим входом блока 4. Входы блока 1 соединены со вторым выходом блока 2 и блоком 8.
Далее описана работа устройства.
Блок 1 нашлемного целеуказания и индикации включает устройство определения углового положения головы летчика и визирное устройство с неподвижным перекрестием, где также индицируются захват цели оптиколокационной станцией 2 и головкой самонаведения 4.
Летчик совмещает неподвижное перекрестие нашлемного визира с воздушной целью, после чего нажимает кнопку 3. Целеуказание с блока 1 поступает на оптиколокационную станцию 2 и головку самонаведения 4 через блок 5. На оптиколокационную станцию 2 поступает команда разрешения захвата с блока 3, после чего она переходит в режим обнаружения и захвата цели в поле захвата.
В блоке 5 формируется сигнал целеуказания на головку 4. Блок 5 представляет собой ключ. В нормально замкнутом состоянии на его выход проходит сигнал целеуказания с блока 1, а при захвате цели оптиколокационной станцией 2 на третий вход блока 5 поступает сигнал захвата со второго выхода блока 2 и на выход блока 5 проходит сигнал целеуказания с первого выхода блока 2. Выходной сигнал блока 5 формируется в соответствии с выражением:
В блоке 6 формируется сигнал устойчивого захвата цели головкой самонаведения 4. Сигнал захвата с блока 4 поступает на блок 8, где запоминается. При пропадании сигнала с блока 4 запускается счетчик 11 (U10=1). При превышении выходным сигналом счетчика 11 порогового значения, запомненного в блоке 9, срабатывает компаратор 12 (U12=1), что обнуляет выход блока 8. Т.е. при кратковременных пропаданиях сигнала с блока 4 сигнал устойчивого захвата с блока 8 не снимается. Величина допустимого времени пропадания сигнала с блока 4 задается величиной порога U9.
В блоке 7 формируются сигналы управления головкой самонаведения 4. При нажатии кнопки 3 либо захвате цели оптиколокационной станцией 2 сигнал с выхода блока 14 (U13=U14=1) поступает на третий вход головки самонаведения 4, которая переходит в режим отработки целеуказания, поступающего с блока 5. При отпускании кнопки 3 и отсутствии захвата станции 2 (U13 = 0, U14 = 1) и наличии захвата цели головкой самонаведения (U8 =1, U16 = 1) на второй вход блока 4 поступает сигнал перехода головки самонаведения в режим автосопровождения, а сигнал отработки целеуказания с блока 14 снимается (U17 = 1, U14 = 0). Для перенацеливания ракеты летчик накладывает перекрестие нашлемного визира на другую цель и повторно нажимает кнопку 3, после чего (U13 = U14 = 1) головка самонаведения 4 переходит в режим отработки целеуказания по новой цели, режим автосопровождения снимается (U15 = U16 = 0).
Таким образом эффективное управление головкой самонаведения авиационной управляемой ракеты по визуально видимой цели обеспечивается как при условии сопровождения цели оптиколокационной станцией с лазерным дальномером, так и вне зоны ее работы (либо в условиях помех), при этом обеспечивается возможность оперативного перенацеливания ракеты на другую цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158406C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2007 |
|
RU2344969C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2006 |
|
RU2312296C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206043C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2150068C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 1999 |
|
RU2150069C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
Технический результат - повышение помехозащищенности прицельной системы. Оптикоэлектронная прицельная система самолета содержит последовательно соединенные блок нашлемного целеуказания и оптиколокационную станцию с лазерным дальномером, кнопку разрешения захвата цели, управляемой летчиком, головку самонаведения авиационной управляемой ракеты. Кроме того, она содержит формирователь целеуказания авиационной управляемой ракете, формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, блок управления режимами работы головки самонаведения авиационной управляемой ракеты с возможностью перенацеливания. Причем формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты выполнен с возможностью функционирования при кратковременных сбросах захвата головкой самонаведения авиационной управляемой ракеты. 2 з.п. ф-лы, 1 ил.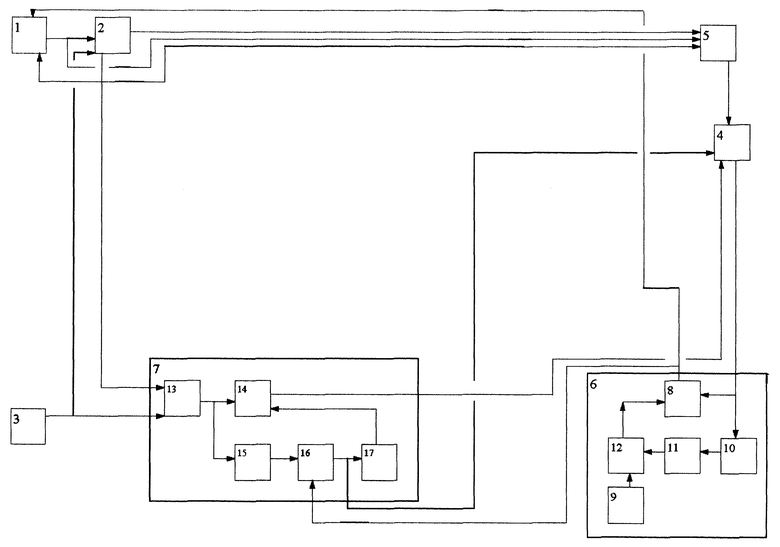
| ГЛАДКОВ Д.И | |||
| и др | |||
| Боевая авиационная техника | |||
| Авиационное вооружение | |||
| - М.: Воениздат, 1987, с.218 | |||
| EP, 0054489, A1, 23.06.1982 | |||
| DE, 3213235, A1, 13.10.1983 | |||
| US, 3848509, 19.11.1974 | |||
| FR, 2542863, A1, 21.09.1984. |

