Изобретение относится к средствам вооружения для широкого класса военных самолетов в частности для многофункциональных истребителей, и может применяться для поражения визуально видимых высокоманевренных воздушных целей, а также для обеспечения обороны самолетов.
Наиболее близким к изобретению является оптико-электронная прицельная система самолета, содержащая прицельный элемент, оптико-локационную станцию с лазерным дальномером, формирователь целеуказания авиационной управляемой ракеты и головку самонаведения авиационной управляемой ракеты, блок формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты и блок управления режимами работы головки самонаведения авиационной управляемой ракеты, при этом выход прицельного элемента соединен одновременно с первым входом формирователя целеуказаний авиационной управляемой ракеты и первым входом оптико-локационной станции с лазерным дальномером, второй вход которого соединен с выходом кнопки разрешения захвата цели, а первый и второй выходы соединены соответственно со вторым и третьим входами формирователя целеуказания авиационной управляемой ракеты, выход которого соединен с первым входом головки самонаведения головки, второй и третий входы которого соединены соответственно с первым и вторым выходом блока управления режимами формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, а выход с входом блока формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, который выполнен в виде первого блока запоминания, блока памяти, последовательно соединенных первого логического элемента НЕ, счетчика и компаратора, причем вход блока соединен одновременно с первым входом первого блока запоминания и со входом первого логического элемента НЕ, второй вход компаратора соединен с выходом блока памяти, а выход - со вторым входом первого блока запоминания, выход которого соединен со вторым входом прицельного элемента, блок управления режимами работы головки самонаведения авиационной управляемой ракеты выполнен в виде последовательно соединенных логического элемента ИЛИ и второго блока запоминания, последовательно соединенных второго логического элемента НЕ, логического элемента И и элемента задержки, выход которого соединен с управляющим входом второго блока запоминания, причем выход логического элемента ИЛИ соединен со входом второго логического элемента НЕ, входы логического элемента ИЛИ - первый и третий входы блока, второй вход логического элемента И - второй вход блока, а его выход - первый выход блока, выход второго блока запоминания - второй выход блока (Патент РФ на изобретение № 2158407, кл. F41G 3/22, 27.10.2000 г.)
Недостатком существующего устройства является осуществление целеуказаний в ближнем воздушном бою без учета динамики изменения угловой скорости движения цели.
Технической задачей изобретения является повышения точности целеуказаний головки самонаведения авиационной управляемой ракеты за счет учета значений угловой скорости движения цели.
Решение технической задачи достигается тем, что в оптико-электронную прицельную система самолета, содержащую прицельный элемент, оптико-локационную станцию с лазерным дальномером, формирователь целеуказания авиационной управляемой ракеты и головку самонаведения авиационной управляемой ракеты, блок формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты и блок управления режимами работы головки самонаведения авиационной управляемой ракеты, при этом выход прицельного элемента соединен одновременно с первым входом формирователя целеуказаний авиационной управляемой ракеты и первым входом оптико-локационной станции с лазерным дальномером, второй вход которого соединен с выходом кнопки разрешения захвата цели, а первый и второй выходы соединены соответственно со вторым и третьим входом формирователя целеуказания авиационной управляемой ракеты, выход которого соединен с первым входом головки самонаведения головки, второй и третий входы которого соединены соответственно с первым и вторым выходами блока управления режимами формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, а выход с входом блока формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, который выполнен в виде первого блока запоминания, блока памяти, последовательно соединенных первого логического элемента НЕ, счетчика и компаратора, причем вход блока соединен одновременно с первым входом первого блока запоминания и со входом первого логического элемента НЕ, второй вход компаратора соединен с выходом блока памяти, а выход - со вторым входом первого блока запоминания, выход которого соединен со вторым входом прицельного элемента, блок управления режимами работы головки самонаведения авиационной управляемой ракеты выполнен в виде последовательно соединенных логического элемента ИЛИ и второго блока запоминания, последовательно соединенных второго логического элемента НЕ, логического элемента И и элемента задержки, выход которого соединен с управляющим входом второго блока запоминания, причем выход логического элемента ИЛИ соединен со входом второго логического элемента НЕ, входы логического элемента ИЛИ - первый и третий входы блока, второй вход логического элемента И - второй вход блока, а его выход - первый выход блока, выход второго блока запоминания - второй выход блока, дополнительно введен блок анализа параметров движения цели, вход которого соединен с выходом прицельного элемента, а выход соединен с первым входом блока формирователя целеуказаний управляемой ракеты, при этом блок анализа параметров движения цели состоит из дифференцирующей цепи, n-первых пороговых устройств, n-триггеров, n-первых ключей, первого сумматора, первой, второй, третьей линий задержки, второго, третьего и четвертого ключей, второго, третьего и четвертого пороговых устройств, первого и второго сдвиговых регистров, первого и второго элементов И-НЕ, первого и второго элемента И, генератора импульсов, первого и второго счетчиков, вычитающего устройства, делителя, интегратора, второго сумматора, задатчика сигналов, причем выход прицельного элемента соединен со входом дифференцирующей цепи и с первыми входами n-пороговых устройств, вторые входы которых соединены с первыми выходами задатчика сигналов, а выходы соединены с первыми входами n-триггеров, вторые входы которых соединены с выходом дифференцирующей цепи, выходы триггеров соединены с первыми входами n-первых ключей, вторые входы которых соединены со вторыми выходами задатчика сигналов, а выходы n-первых ключей через сумматор соединены со вторыми входами второго, третьего и четвертого ключей, первые входы которых соответственно через первую, вторую и третью линию задержек соединены с выходом дифференцирующей цепи, выходы второго, третьего и четвертых ключей соединены с первыми входами второго, третьего и четвертых пороговых устройств, вторые входы которых соединены с выходом первого элемента И, выход второго порогового устройства через первый сдвиговый регистр соединен с первым входом второго элемента И, второй и третий входы которого соединены соответственно с выходом первого элемента И-НЕ и выходом генератора импульсов, выход первого элемента И через первый счетчик соединен с первым входом вычитающего устройства, второй вход которого через второй счетчик соединен с выходом второго элемента И, первый, второй и третий входы которого соединены соответственно с выходом второго сдвигового регистра, генератора импульсов, второго элемента И-НЕ, выход вычитающего элемента соединен с первым входом делителя, второй вход которого соединен с выходом второго счетчика, выход делителя через интегратор соединен с первым входом второго сумматора, второй вход которого соединен с выходом прицельного элемента, а выход сумматора является выходом блока анализа.
Новыми признаками по устройству является блок анализа параметров движения цели, который состоит из дифференцирующей цепи, n-первых пороговых устройств, n-триггеров, n-первых ключей, первого сумматора, первой, второй, третьей линии задержки, второго, третьего и четвертого ключей, второго, третьего, четвертых пороговых устройств, первого и второго сдвигового регистров, первого и второго элементов И-НЕ, первого и второго элементов И, генератора импульсов, первого и второго счетчиков, вычитающего устройства, делителя, интегратора, второго сумматора, задатчика сигналов, и связи между известными и новыми элементами.
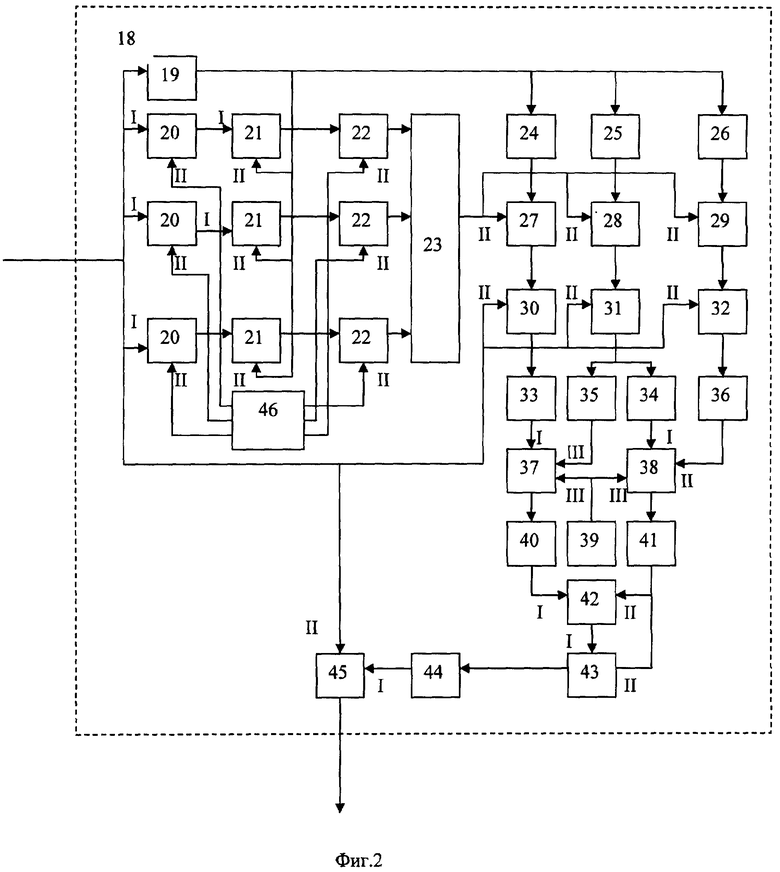
На фиг.1 приведена структурная схема оптико-электронного устройства, на фиг.2 - то же блока анализа параметров движения цели.
Прицельный элемент выполнен в виде блока 1 нашлемного целеуказания и индикации. Блок 1 нашлемного целеуказания и индикации включает устройство определения углового положения головы летчика и визирное устройство с неподвижным перекрестием, где также индицируются захват цели оптико-локационной станцией 2 и головкой самонаведения 4.
Формирователь признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты выполнен с возможностью функционирования при кратковременных сбросах захвата головкой самонаведения авиационной управляемой ракеты.
Блок управления режимами работы головки самонаведения авиационной управляемой ракеты выполнен с возможностью перенацеливания головки самонаведения ракеты.
Устройство содержит блок 1 нашлемного целеуказания и индикации, оптико-локационную станцию 2 с лазерным дальномером, кнопку 3 разрешения захвата цели, управляемую летчиком, головку 4 самонаведения авиационной управляемой ракеты, формирователь 5 целеуказания авиационной управляемой ракете, блок 6 формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, блок 7 управления режимами работы головки самонаведения авиационной управляемой ракеты с возможностью перенацеливания, блок 18 анализа параметров движения цели.
Блок 6 содержит первый блок запоминания 8, блок памяти 9, первый логический элемент НЕ 10, счетчик 11 и компаратор 12.
Блок 7 содержит логический элемент ИЛИ 13, второй блок запоминания 14, второй логический элемент НЕ 15, логический элемент И 16 и элемент задержки 17.
Блок 18 анализа параметров движения цели состоит из дифференцирующей цепи 19, n-первых пороговых устройств 20, n-триггеров 21, n-первых ключей 22, первого сумматора 23, первой 24, второй 25, третьей 26 линий задержки, второго 27, третьего 28 и четвертого 29 ключей, второго 30, третьего 31 и четвертого 32 пороговых устройств, первого 33 и второго 34 сдвиговых регистров, первого 35 и второго 36 элементов И-НЕ, первого 37 и второго 38 элементов И, генератора 39 импульсов, первого 40 и второго 41 счетчиков, вычитающего устройства 42, делителя 43, интегратора 44, второго 45 сумматора, задатчика 46 сигналов.
Выход блока 1 соединен одновременно с первым входом блока 2 и входом блока 18 анализа параметров движения цели, выход которого соединен с первым входом блока 5. Второй и третий входы блока 5 соединены с первым и вторым выходами блока 2, выход блока 5 соединен с первым входом блока 4, выход которого соединен с входом блока 6.
Вход блока 6 соединен с первым входом первого 8 блока запоминания и входом первого 10 логического элемента НЕ. Выход первого 10 логического элемента НЕ соединен через счетчик 11 с первым входом компаратора 12, второй вход которого соединен с выходом блока памяти 9, а выход - со вторым входом первого 8 блока запоминания. Выход кнопки 3 разрешения захвата цели соединен со вторым входом блока 2 и первым входом логического элемента 13, второй вход которого соединен со вторым выходом блока 2, а выход - с первым входом второго блока запоминания 14, и одновременно со входом второго логического элемента НЕ 15, выход которого соединен со первым входом логического элемента И 16, второй вход которого соединен с выходом первого 8 блока запоминания, а выход - с входом элемента задержки 17 и вторым входом блока 4. Выход блока 17 соединен со вторым входом второго 14 блока запоминания, выход которого соединен с третьим входом блока 4. Входы блока 1 соединены со вторым выходом блока 2 и выходом блока 8.
Выход блока 1 нашлемного целеуказания соединен со входом дифференцирующей цепи 19 и с первыми входами n-первых 20 пороговых устройств, вторые входы которых соединены с первыми выходами задатчика 46 сигналов, а выходы соединены с первыми входами n-триггеров 21, вторые входы которых соединены с выходом дифференцирующей цепи 19, выходы триггеров 21 соединены с первыми входами первых 22 ключей, вторые входы которых соединены со вторыми выходами задатчика 46 сигналов, а выходы через сумматор 23 соединены со вторыми входами второго 27, третьего 28 и четвертого 29 ключей, первые входы которых соответственно через первую 24, вторую 25 и третью 26 линии задержки соединены с выходом дифференцирующей цепи 19, выходы второго 27, третьего 28 и четвертых 29 ключей соединены с первыми входами второго 30, третьего 31 и четвертого 32 пороговых устройств, вторые входы которых соединены с выходом блока 1, выход второго 31 порогового устройства через первый 33 сдвиговый регистр соединен с первым входом первого 37 элемента И, второй и третий входы которого соединены соответственно с выходом первого 35 элемента И-НЕ и выходом генератора 39 импульсов, выход первого 37 элемента И через первый 40 счетчик соединен с первым входом вычитающего устройства 42, второй вход которого через второй 41 счетчик соединен с выходом второго 38 элемента И, первый, второй и третий входы которого соединены соответственно с выходом второго 34 сдвигового регистра, генератора 39 импульсов, второго 36 элемента И-НЕ, выход вычитающего устройства 42 соединен с первым входом делителя 43, второй вход которого соединен с выходом второго 41 счетчика, выход делителя 43 через интегратор 44 соединен с первым входом второго 44 сумматора, второй вход которого соединен с выходом прицельного элемента 1, а выход является выходом блока анализа параметров движения цели и соединен с первым входом формирователя целеуказаний.
Устройство работает следующим образом.
Летчик совмещает неподвижное перекрестие нашлемного визира с воздушной целью, после чего нажимает кнопку 3. Целеуказание с блока 1 поступает на оптико-локационную станцию 2 и головку самонаведения 4 через блок 18 анализа параметров движения цели и первый вход блока 5. На оптико-локационную станцию 2 поступает команда разрешения захвата с блока 3, после чего она переходит в режим обнаружения и захвата цели в поле захвата.
В случае кратковременного сопровождения воздушной цели на блок анализа параметров движения цели поступают угловые координаты воздушной цели, анализ динамики изменения их значений позволит определить угловую скорость движения цели.
Текущие значения угловых координат цели поступают на вход дифференцирующей цепи и на первые входы n-пороговых устройств 20, на вторые входы которых поступают сигналы с первых выходов задатчика 46 сигналов.
С выходов дифференцирующей цепи 19 сигналы поступают на вторые входы («входы обнуления») триггеров 21.
С выходов пороговых устройств 20 сигналы поступают на первые входы n-триггеров 21, с выходов которых поступают на первые входы первых 22 ключей, на вторые входы которых поступают сигналы со вторых выходов задатчика 46 сигналов, с выходов первых 22 ключей через сумматор 23 сигналы пропорциональные текущим угловым положением цели поступают на вторые входы второго 27, третьего 28 и четвертого 29 ключей, на первые входы которых поступают сигналы соответственно через первую 24, вторую 25 и третью 26 линии задержки с выхода дифференцирующей цепи 19.
Через интервалы времени, заданные линиями задержек, информация об угловом положении цели поступает с выходов второго 27, третьего 28 и четвертых 29 ключей на первые входы второго 30, третьего 31 и четвертых 32 пороговых устройств, на вторые входы которых поступают сигналы, определяющие текущие значения угловых положений цели с выхода блока 1.
Данное схемное решение позволяет осуществлять сравнивание угловых положений воздушных целей для определения скорости движения цели.
Определение скорости движения цели осуществляется следующим образом.
С выходов второго 30 порогового устройства через первый 33 сдвиговый регистр сигнал поступает на первый вход первого 37 элемента И, на второй и третий входы которого поступают сигналы соответственно с выходов первого 35 элемента И-НЕ и выхода 39 генератора импульсов.
Сигнал с выхода первого 37 элемента И через первый 40 счетчик поступает на первый вход вычитающего устройства 42, на второй вход которого поступает сигнал через второй 41 счетчик с выхода второго 38 элемента И, на первый, второй и третий входы которого поступают сигналы соответственно с выхода второго 34 сдвигового регистра, второго 36 элемента И-НЕ, генератора 39 импульсов. С выхода вычитающего устройства 42 сигнал поступает на первый вход делителя 43, на второй вход которого поступает сигнал с выхода второго 41 счетчика, с выхода делителя 43 сигнал поступает через интегратор 44 на первый вход второго 45 сумматора, на второй вход которого поступает сигнал с выхода блока 1, с выхода сумматора 45 сигнал поступает на первый вход блока 5, обеспечивая целеуказания головки 4 самонаведения ракеты в упрежденную точку.
В блоке 5 формируется сигнал целеуказания на головку 4. Блок 5 представляет собой ключ. В нормально замкнутом состоянии на его выход проходит сигнал целеуказания с блока 1, а при захвате цели оптико-локационной станцией 2 на третий вход блока 5 поступает сигнал захвата со второго выхода блока 2 и на выход блока 5 проходит сигнал целеуказания с первого выхода блока 2.
Выходной сигнал блока 5 формируется в соответствии с выражением:
В блоке 6 формируется сигнал устойчивого захвата цели головкой самонаведения 4. Сигнал захвата с блока 4 поступает на блок 8, где запоминается. При пропадании сигнала с блока 4 запускается счетчик 11 (U10=1). При превышении выходным сигналом счетчика 11 порогового значения, запомненного в блоке 9, срабатывает компаратор 12 (U12=1), что обнуляет выход блока 8. Т.е. при кратковременных пропаданиях сигнала с блока 4 сигнал устойчивого захвата с блока 8 не снимается. Величина допустимого времени пропадания сигнала с блока 4 задается величиной порога U9.
В блоке 7 формируются сигналы управления головкой самонаведения 4. При нажатии кнопки 3 либо захвате цели оптико-локационной станцией 2 сигнал с выхода блока 14 (U13=U14=1) поступает на третий вход головки самонаведения 4, которая переходит в режим отработки целеуказания, поступающего с блока 5. При отпускании кнопки 3 и отсутствии захвата станции 2 (U13=0, U14=1) и наличии захвата цели головкой самонаведения (U8=1, U16=1) на второй вход блока 4 поступает сигнал перехода головки самонаведения в режим автосопровождения, а сигнал отработки целеуказания с блока 14 снимается (U17=1, U14=0).
Для перенацеливания ракеты летчик накладывает перекрестие нашлемного визира на другую цель и повторно нажимает кнопку 3, после чего (U13=U14=1) головка самонаведения 4 переходит в режим отработки целеуказания по новой цели, режим автосопровождения снимается (U15=U16=0).
Таким образом, эффективное управление головкой самонаведения авиационной управляемой ракеты по визуально видимой цели обеспечивается как при условии сопровождения цели оптико-локационной станцией с лазерным дальномером, так и вне зоны ее работы (либо в условиях помех), при этом обеспечивается возможность осуществления целеуказания цели в упрежденную точку за счет учета угловой скорости ее движения.
Изобретение относится к средствам вооружения для военных самолетов в частности для многофункциональных истребителей, и может применяться для поражения визуально видимых высокоманевренных воздушных целей, а также для обеспечения активной обороны самолетов. Технический результат - повышение точности целеуказаний головки самонаведения ракеты. Сущность изобретения заключается в определении угловой скорости цели и осуществления целеуказания с учетом углового положения цели и угловой скорости цели. Блок анализа параметров движения цели состоит из дифференцирующей цепи, n-первых пороговых устройств, n-триггеров, n-первых ключей, первого сумматора, первой, второй, третьей линий задержки, второго, третьего и четвертого ключей, второго, третьего и четвертого пороговых устройств, первого и второго сдвиговых регистров, первого и второго элементов И-НЕ, первого и второго элемента И, генератора импульсов, первого и второго счетчиков, вычитающего устройства, делителя, интегратора, второго сумматора, задатчика сигналов. 2 ил.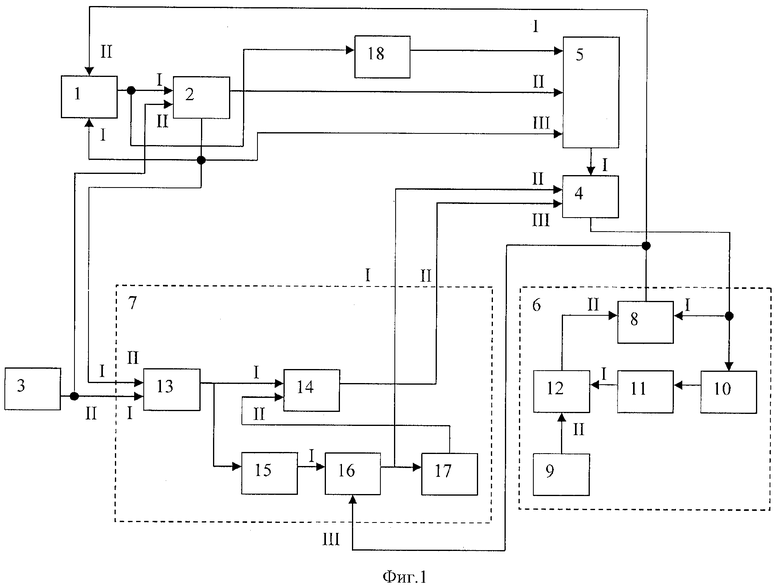
Оптико-электронная прицельная система самолета, содержащая прицельный элемент, оптико-локационную станцию с лазерным дальномером, формирователь целеуказания авиационной управляемой ракеты и головку самонаведения авиационной управляемой ракеты, блок формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты и блок управления режимами работы головки самонаведения авиационной управляемой ракеты, при этом выход прицельного элемента соединен с первым входом оптико-локационной станции с лазерным дальномером, второй вход которой соединен с выходом кнопки разрешения захвата цели, а первый и второй выходы соединены соответственно со вторым и третьим входом формирователя целеуказания авиационной управляемой ракеты, выход которого соединен с первым входом головки самонаведения головки, второй и третий входы которого соединены соответственно с первым и вторым выходами блока блок управления режимами работы головки самонаведения авиационной управляемой ракеты, а выход с входом блока формирователя признака устойчивого захвата цели головкой самонаведения авиационной управляемой ракеты, который выполнен в виде первого блока запоминания, блока памяти, последовательно соединенных первого логического элемента НЕ, счетчика и компаратора, причем вход блока соединен одновременно с первым входом первого блока запоминания и с входом первого логического элемента НЕ, второй вход компаратора соединен с выходом блока памяти, а выход - со вторым входом первого блока запоминания, выход которого соединен со вторым входом прицельного элемента, блок управления режимами работы головки самонаведения авиационной управляемой ракеты выполнен в виде последовательно соединенных логического элемента ИЛИ и второго блока запоминания, последовательно соединенных второго логического элемента НЕ, логического элемента И и элемента задержки, выход которого соединен с управляющим входом второго блока запоминания, причем выход логического элемента ИЛИ соединен со входом второго логического элемента НЕ, входы логического элемента ИЛИ являются первым и третьим входами блока, второй вход логического элемента И является вторым входом блока, а его выход является первым выходом блока, выход второго блока запоминания является вторым выходом блока, отличающаяся тем, что она снабжена блоком анализа параметров движения цели, вход которого соединен с выходом прицельного элемента, а выход соединен с первым входом блока формирователя целеуказаний управляемой ракеты, при этом блок анализа параметров движения цели состоит из дифференцирующей цепи, n-первых пороговых устройств, n-триггеров, n-первых ключей, первого сумматора, первой, второй, третьей линий задержки, второго, третьего и четвертого ключей, второго, третьего и четвертого пороговых устройств, первого и второго сдвиговых регистров, первого и второго элементов И-НЕ, первого и второго элементов И, генератора импульсов, первого и второго счетчиков, вычитающего устройства, делителя, интегратора, второго сумматора, задатчика сигналов, причем выход прицельного элемента соединен с входом дифференцирующей цепи и с первыми входами n-пороговых устройств, вторые входы которых соединены с первыми выходами задатчика сигналов, а выходы соединены с первыми входами n-триггеров, вторые входы которых соединены с выходом дифференцирующей цепи, выходы триггеров соединены с первыми входами первых ключей, вторые входы которых соединены со вторыми выходами задатчика сигналов, а выходы через сумматор соединены со вторыми входами второго, третьего и четвертого ключей, первые входы которых соответственно через первую, вторую и третью линии задержки соединены с выходом дифференцирующей цепи, выходы второго, третьего и четвертого ключей соединены с первыми входами второго, третьего и четвертого пороговых устройств, вторые входы которых соединены с выходом прицельного элемента, выход второго порогового устройства через первый сдвиговый регистр соединен с первым входом первого элемента И, второй и третий входы которого соединены соответственно с выходом первого элемента И-НЕ и выходом генератора импульсов, а выход первого элемента И через первый счетчик соединен с первым входом вычитающего устройства, второй вход которого через второй счетчик соединен с выходом второго элемента И, первый, второй и третий входы которого соединены соответственно с выходом второго сдвигового регистра, генератора импульсов, второго элемента И-НЕ, выход вычитающего элемента соединен с первым входом делителя, второй вход которого соединен с выходом второго счетчика, выход делителя через интегратор соединен с первым входом второго сумматора, второй вход которого соединен с выходом прицельного элемента, а выход сумматора является выходом блока анализа.
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158407C1 |
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2542863C1 |
| Станок для изготовления иголок из пруткового материала | 1938 |
|
SU54489A1 |
| DE 3213235 А1, 13.10.1983 | |||
| US 3848509 А, 19.11.1974. | |||

