Изобретение относится к радиосвязи и может использоваться в системах передачи как дискретных, так непрерывных сообщений по каналам связи, подверженных действию аддитивных коррелированных помех.
Известно устройство [1, стр. 276, рис. 12.1], изображенное на фиг. 1 данного описания, содержащее последовательно соединенные адаптивный фильтр и сумматор, выход адаптивного фильтра соединен с первым входом сумматора, причем вход адаптивного фильтра является эталонным входом устройства, второй вход сумматора является сигнальным входом устройства, выход сумматора является выходом устройства и соединен с управляющим входом адаптивного фильтра.
Однако известное устройство имеет значительный недостаток, связанный с тем, что устройство требует для своей работы наличия дополнительного сигнала на эталонном входе устройства. Этот сигнал должен быть не коррелирован с входным сигналом, несущим информацию, и не сильно коррелирован с помехой, содержащейся вместе с входным сигналом на входе 1 устройства. Следует отметить, что на практике, чтобы найти подходящий эталонный сигнал, требуется решить ряд сложных задач и, если бы в действительности такой сигнал имелся, то адаптивная система была бы не нужна, можно было бы обойтись только вычитающим устройством. В условиях априорной неопределенности относительно свойств аддитивных помех данное устройство могло бы быть использовано совместно с идеями разнесенного приема, когда сигнальный и эталонный входы устройства являются сигналами двух ветвей разнесения.
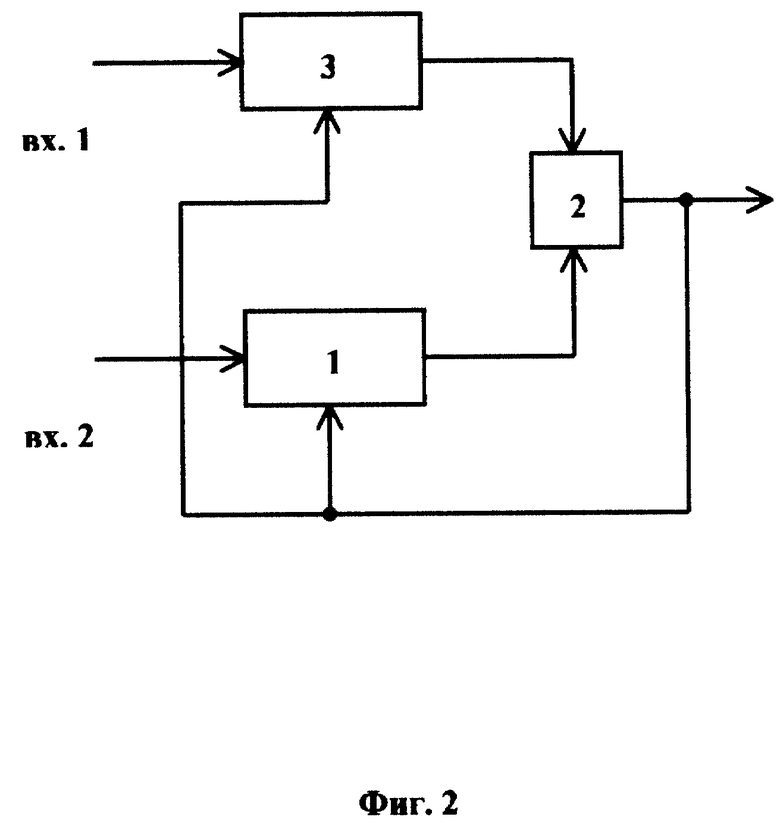
Наиболее близким по технической сущности к заявляемому устройству является устройство [1, стр. 354, рис. 13.15] для случая двух ветвей разнесения (К= 2), изображенное на фиг. 2 данного описания, содержащее первый и второй адаптивные фильтры и сумматор, выходы адаптивных фильтров соединены с первым и вторым входами сумматора, причем входы адаптивных фильтров являются сигнальными входами двух ветвей разнесения, а выход сумматора соединен с управляющими входами адаптивных фильтров.
Недостаток данного устройства проявляется в том, что данное устройство также оказывается практически неработоспособным, как и аналог в случае, когда сигналы и помехи в ветвях разнесения оказываются некоррелированными. Главным условием работоспособности устройства является наличие на его входах сильно коррелированных составляющих помехи.
Сущность предлагаемого изобретения - улучшение качества адаптивного подавления помех, возможность работы в условиях априорной неопределенности относительно их свойств.
Эта сущность достигается тем, что в устройство адаптивного подавления помех, содержащее первый и второй адаптивные фильтры и сумматор, выходы адаптивных фильтров соединены с первым и вторым входами сумматора, введены блок вычисления отсчетов корреляционной функции, блок вычисления коэффициентов управления адаптивных фильтров, блок усреднения, масштабный блок, первый и второй сумматоры, причем входами устройства являются первый и второй входы блока вычисления отсчетов корреляционной функции, первый выход которого подключен к входу второго адаптивного фильтра и к первому входу первого сумматора, второй выход блока вычисления отсчетов корреляционной функции подключен к входу первого адаптивного фильтра и к первому входу второго сумматора, третий выход блока вычисления отсчетов корреляционной функции соединен с третьим входом масштабного блока и с первым входом блока вычисления коэффициентов управления адаптивных фильтров, второй вход которого соединен с выходом сумматора, а выход подключен к управляющим входам первого и второго адаптивных фильтров, выход сумматора соединен с первым входом масштабного блока, а через блок усреднения со вторым входом масштабного блока, выход которого подключен ко вторым входам первого и второго сумматоров, выходы которых являются выходами всего устройства.
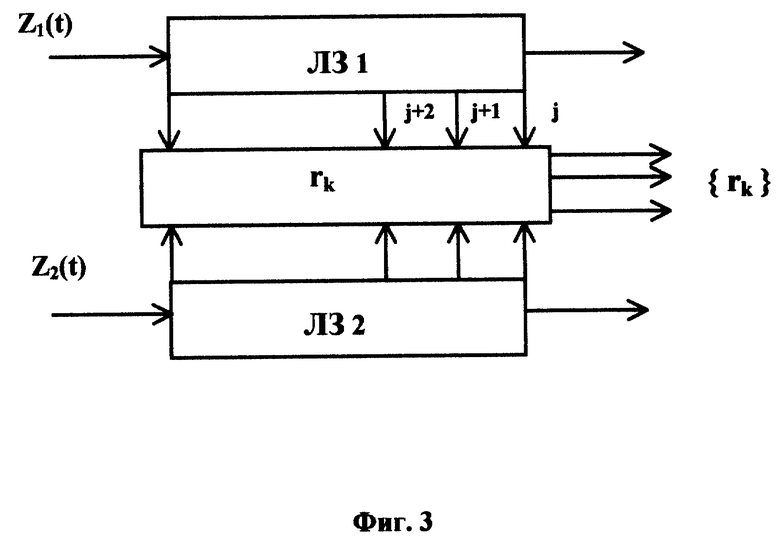
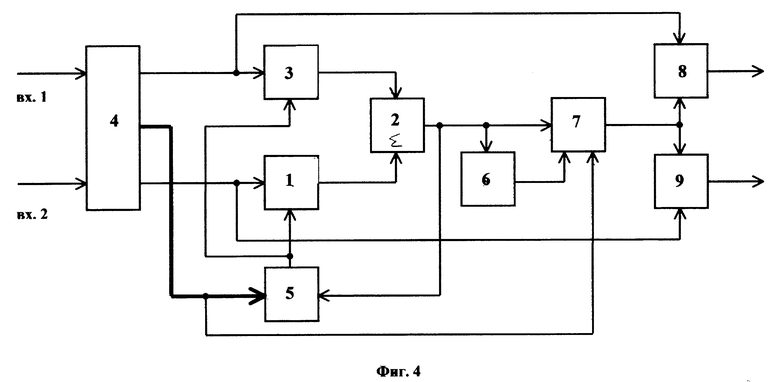
На фиг. 1 представлена функциональная схема адаптивного фильтра (аналог); на фиг. 2 представлена функциональная схема матричного адаптивного фильтра (прототип); на фиг. 3 представлена функциональная схема блока вычисления отсчетов корреляционной функции; на фиг. 4 представлена функциональная схема предлагаемого устройства.
Устройство адаптивного подавления помех (фиг. 4) содержит первый адаптивный фильтр 1, сумматор 2, второй адаптивный фильтр 3, блок 4 вычисления отсчетов корреляционной функции, блок 5 вычисления коэффициентов управления адаптивных фильтров, блок 6 усреднения, масштабный блок 7, первый сумматор 8, второй сумматор 9.
Устройство адаптивного подавление помех содержит первый 1 и второй 3 адаптивные фильтры и сумматор 2, блок 4 вычисления отсчетов корреляционной функции, блок 5 вычисления коэффициентов управления адаптивных фильтров, блок 6 усреднения, масштабный блок 7, первый сумматор 8, второй сумматор 9, причем выходы первого 1 и второго 3 адаптивных фильтров соединены с первым и вторым входами сумматора 2, входами устройства являются первый и второй входы блока 4 вычисления отсчетов корреляционной функции, первый выход которого подключен к входу второго адаптивного фильтра 3 и к первому входу первого сумматора 8, второй выход блока 4 вычисления отсчетов корреляционной функции подключен к входу первого адаптивного фильтра 1 и к первому входу второго сумматора 9, третий выход блока 4 вычисления отсчетов корреляционной функции соединен с третьим входом масштабного блока 7 и с первым входом блока 5 вычисления коэффициентов управления адаптивных фильтров, второй вход которого соединен с выходом сумматора 2, а выход подключен к управляющим входам первого 1 и второго 3 адаптивных фильтров, выход сумматора 2 соединен с первым входом масштабного блока 7, а через блок 6 усреднения со вторым входом масштабного блока 7, выход которого подключен ко вторым входам первого 8 и второго 9 сумматоров, выходы которых являются выходами всего устройства.
Устройство работает следующим образом.
В условиях априорной неопределенности относительно свойств сосредоточенных помех рассмотрим один из возможных способов предварительной обработки принимаемой смеси полезного сигнала S(t), сосредоточенной помехи ξ (t) и флуктуационного шума n(t), основанный на использовании адаптивной фильтрации совместно с разнесенным приемом.
При этом будем предполагать, что обработка осуществляется в низкочастотной области после преобразования частоты в полосе, определяемой шириной спектра полезного сигнала. Такие условия анализа предполагают использование рассматриваемого метода фильтрации в радиоканалах различных диапазонов волн, в которых понятие "сосредоточенная помеха" используется в том, что ширина спектра помехи ξ (t) меньше или соизмерима с шириной спектра полезного сигнала S(t) независимо от типа передаваемых сообщений и используемых видов модуляции.
Известно [1] , что в схеме, представленной на фиг. 1, адаптивный фильтр (АФ) - блок 1, изменяющий свою импульсную характеристику под воздействием выходного сигнала, например по алгоритму наименьших квадратов, отфильтровывает из сигнала на втором входе сумматора 2 все составляющие, коррелированные с сигналом на входе АФ, по критерию минимума среднеквадратической ошибки. При этом после окончания процесса адаптации в режиме слежения за медленным изменением корреляционных свойств сигнала на входе АФ, АФ идентичен фильтру Колмогорова-Винера [1].
Пусть полезный сигнал, помеха и шум являются стационарными случайными процессами, а сигналы двух ветвей разнесения z2(t) и z1(t) подаются соответственно на вх.1 и вх.2 устройства фиг. 1:
z1(t) = S1(t) + ξ1 (t) + n1(t);
z2(t) = S2(t) + ξ2 (t) + n2(t). (1)
В дальнейшем предполагаем независимость S1(t) от ξi (t), i,j = 1,2, и от "белых" шумов n1(t) и n2(t). Модуль коэффициента передачи АФ в стационарном режиме запишется в виде
где  - взаимный энергетический спектр сигналов z2(t) и z1(t),
- взаимный энергетический спектр сигналов z2(t) и z1(t), - энергетический спектр сигнала на вх.2 (эталонном входе).
- энергетический спектр сигнала на вх.2 (эталонном входе).
Строго говоря, модуль коэффициента передачи фильтра Колмогорова-Винера, дающего оценку ξi (t), определяется как
однако формула (2) учитывает особенности рассматриваемой схемы. В нашем случае взаимный энергетический спектр зависит только от коррелированных составляющих процессов на первом и втором входах, поэтому
Будем предполагать, что GS(ω) и Gξ(ω) - энергетические спектры сигнала и помехи на передаче (в месте возникновения), a Ki(j ω ) и Li(j ω ), i,j = 1,2, - коэффициенты передачи соответствующих путей распространения сигнала и помехи к месту приема. Тогда

Исходя из определения взаимного энергетического спектра как преобразования Фурье взаимной корреляционной функции, можно показать, что

где (°)* и  - символы комплексной сопряженности и усреднения.
- символы комплексной сопряженности и усреднения.
Подставляя (3), (4) и (5) в (2) получим:
где N2 - энергетический спектр n2(t).
Для энергетического спектра шума и сигнала на выходе схемы фиг.1 при действии на вх. 1 и вх. 2 сигналов z2(t) и z1(t) можно получить

Из (8) следует, что возможные искажения полезного сигнала являются линейными, т.к. не появляется новых спектральных составляющих.
Эффективность подавления сосредоточенных помех оценим энергетическим выигрышем:
а также отношением:
где Pс и Pш - мощности сигнала и шума соответственно.
Для удобства анализа введем параметры


В выражении (11) RK и RL определяют корреляцию замираний сигнала и сосредоточенной помехи в ветвях разнесения.
Считая, что после завершения процесса адаптации в стационарном режиме 
 i,j = 1,2, и учитывая, что
i,j = 1,2, и учитывая, что
для (7) и (8) можно получить
где B(ω) = 1+a2(ω)+h
M(ω) = RKF(ω)+RL. (15)
При этом 
a η может быть рассчитано после интегрирования полученных энергетических спектров в заданном диапазоне частот.
Для фиксированного значения ω наибольшее значение ρ принимает при K2(j ω ) = 0 и N2 = 0. Это соответствует случаю идеального "обучения" адаптивного фильтра, когда на его эталонный вход подается помеха, коррелированная с помехой в основной ветви разнесения. При этом ρ = 1/(1-R
Анализ выражения для ρ(ω) при фиксированном значении ω , когда a2, b2, h1 2, h2 2 являются постоянными параметрами, показывает, что при произвольном выборе значений этих параметров максимальное значение ρ достигается при RK = 0 и RL = 1. Это соответствует некоррелированности замираний сигнала в ветвях разнесения и полной коррелированности помехи. При RK = 0 искажения сигнала на выходе, как следует из (12), отсутствуют, и обеспечивается наибольшее значение энергетического выигрыша η.
Рассмотрим пример. Пусть на выходе модулятора энергетический спектр полезного сигнала имеет вид
где T - длительность тактового интервала, а энергетический спектр помехи в месте возникновения:
На входах 1 и 2 схемы фиг. 1 действует аддитивная смесь полезного сигнала, помехи и "белого" шума в соответствии с (1), причем статистическая связь сигналов S1(t) и S2(t) определяется коэффициентом корреляции RK путей распространения сигнала к входам 1 и 2. Корреляция путей распространения помехи к входам 1 и 2 определяется коэффициентом RL. Полоса анализируемых частот, [ω1,ω2] , где 

Из проведенных расчетов следует, что искажения сигнала на выходе практически отсутствуют при малых RK. Энергетический спектр шума на выходе существенно отличается от спектра "белого" шума и при малом отношении Pсвх./Pn1 на входе 1 практически повторяет форму спектра помехи на входе 1.
В случае, когда "белым" шумом на входе можно практически пренебречь (отношение Pсвх./Pn1 велико), энергетический спектр шума на выходе определяется в основном сигналом и, если сосредоточенная помеха имеет большую мощность (отношение  на входе 1 мало), то ее подавление весьма эффективно и дает приемлемое значение энергетического выигрыша. Увеличение Pсвх./Pn1 c 1,19 до 23,7 приводит к изменению выигрыша от η = 1,89 до η = 8,49. Следует заметить, что для практики разнесенного приема в декаметровом канале ситуация с большим отношением Pсвх./Pn1 весьма характерна.
на входе 1 мало), то ее подавление весьма эффективно и дает приемлемое значение энергетического выигрыша. Увеличение Pсвх./Pn1 c 1,19 до 23,7 приводит к изменению выигрыша от η = 1,89 до η = 8,49. Следует заметить, что для практики разнесенного приема в декаметровом канале ситуация с большим отношением Pсвх./Pn1 весьма характерна.
Расчеты показывают, что при малых (Pс/Pш)вх. выигрыш может быть весьма значительным, так, например, при (Pс/Pш)вх. = 0,258 (RK = 1, RL = 0) η = 29,3. Однако отклонение условий приема от "идеальных", когда RK = 1, RL = 0, существенно снижает выигрыш. При RK = 0,8 и RL = 0,2 для (Pс/Pш)вх. = 0,258 выигрыш составляет 2,76.
Проведенный анализ позволяет сделать вывод, что применение адаптивной фильтрации при малом уровне "белых" шумов на основном и эталонном входе весьма эффективно для ситуации разнесенного приема, когда RK = 0 и RL = 1. Отклонение от этих условий существенно снижает эффективность подавления сосредоточенных помех, что требует разработки других схем адаптивной обработки сигналов.
Следует отметить, что "корреляционный" принцип выделения сосредоточенной помехи, используемый в адаптивном фильтре, является достаточно универсальным и позволяет отфильтровывать любую аддитивную помеху независимо от формы и ширины ее спектра, расположения спектра на оси частот и т.д. Главным условием работоспособности схемы является наличие на эталонном входе составляющих помехи, коррелированных с помехой на основном входе.
Практическое использование АФ при обработке принимаемых сигналов на низкой частоте предполагает его реализацию в виде трансверсального фильтра с линейной фазовой характеристикой [4] с числом отводов линии задержки 2N-1, где N - число параметров модели сигнала и помехи как случайных процессов, позволяющих воспроизводить спектры сигнала и помехи с за данной точностью [5]. Такой выбор приводит на практике к значению N, равному 3...5.
Моделирование на ЭВМ данной схемы адаптивной фильтрации с применением алгоритма наименьших квадратов для изменения коэффициента передачи АФ, проведенное для различных спектров полезного сигнала и помех (в том числе и для полностью совпадающих), подтвердило сделанные выше выводы.
Наличие некоторой априорной информации о свойствах фильтруемого процесса ξ1 (t) и возможности разнесенного приема позволяют улучшить качество оценки, формируемой адаптивным фильтром в схеме фиг. 1.
Рассмотрим схему, представленную на фиг. 2.
Если известна автокорреляционная функция стационарного случайного процесса ξ (t), а в z1(t) и z2(t) содержатся процессы, коррелированные c ξ (t), то алгоритм наименьших квадратов, управляющий изменением коэффициентов передачи АФ1 (блок 1) и АФ2 (блок 3), приводит к формированию на выходе схемы оценки  по критерию минимума среднеквадратической ошибки [1]. При разнесенном приеме в предположении RK=0, RL=1 оценка отсчетов корреляционной функции ξ (t) может быть получена согласно схеме фиг. 3. Оценка отсчетов функции корреляции (выход блока 4 вычисления отсчетов корреляционной функции) при этом может быть определена, например, в виде
по критерию минимума среднеквадратической ошибки [1]. При разнесенном приеме в предположении RK=0, RL=1 оценка отсчетов корреляционной функции ξ (t) может быть получена согласно схеме фиг. 3. Оценка отсчетов функции корреляции (выход блока 4 вычисления отсчетов корреляционной функции) при этом может быть определена, например, в виде
где z (tj) - значение сигнала на j-ом отводе линии задержки ЛЗ, а К определяется полосой частот ожидаемой сосредоточенной помехи ξ (t).
Строго говоря, формула (17) дает оценку отсчетов взаимно корреляционной функции z1(t) и z2(t). При RK= 0, RL = 1 эти оценки совпадают с оценками отсчетов автокорреляционной функции ξ (t).
Обозначим
- вектор коэффициентов передачи АФ1 и АФ2 в установившемся режиме. Вектор W(ω) может быть найден из матричного выражения
W(ω) = G
соответствующего уравнению Винера-Хопфа. В выражении (19) Gzz(ω) - матрица энергетических спектров входных сигналов, Gξz(ω) - вектор взаимных
энергетических спектров выделяемой оценки и входных сигналов. Выражения для Gzz(ω) и Gξz(ω) имеют вид
Подставляя (20) в (19), с учетом обозначений (11) для W1( ω ) и W2 ( ω ) в установившемся режиме можно получить
где A(ω) = 1+a2(ω)+h ,
, .
.
Теперь согласно схеме фиг. 2 в установившемся режиме энергетический спектр оценки помехи  на выходе сумматора 2 имеет вид
на выходе сумматора 2 имеет вид
где
 (23)
(23)
Для выше рассмотренного примера результаты вычисления нормированного энергетического спектра оценки для относительно тяжелых условий работы матричного фильтра, представленного на фиг. 2,  ;
;  дают довольно хорошее совпадение энергетических спектров сосредоточенной помехи и ее оценки. Подчеркнем, что данные результаты относятся к устройству фиг. 1, получены в предположении известности корреляционной функции процесса ξ (t).
дают довольно хорошее совпадение энергетических спектров сосредоточенной помехи и ее оценки. Подчеркнем, что данные результаты относятся к устройству фиг. 1, получены в предположении известности корреляционной функции процесса ξ (t).
Будем использовать оценку, полученную матричным фильтром (фиг. 2), в схеме фильтрации, представленной на фиг. 4. Утолщенная стрелка характеризует передачу совокупности отсчетов {rk}, вычисляемую выражением (17), блоку 5 вычисления коэффициентов управления адаптивных фильтров. Блок 5 вычисления коэффициентов управления адаптивных фильтров функционирует по алгоритму наименьших квадратов при известной корреляционной функции помехи [1]. Коэффициент умножения K0 масштабного блока 7 определяет необходимый масштаб представления оценки  и зависит от r0 и дисперсии
и зависит от r0 и дисперсии  оценки
оценки  , формируемой на выходе блока 6 усреднения. Выберем K0 в виде
, формируемой на выходе блока 6 усреднения. Выберем K0 в виде ,
,
где  .
.
Оценим качество фильтрации в верхнем канале предлагаемого устройства, выходным сигналом которого является
Аналогично формулам (7) и (8) можно записать

При использовании ранее введенных обозначений выражения Gшвых. ( ω ) и GSвых. ( ω ) можно привести к виду
В формулах (26) и (27) введены обозначения
P1(ω) = W1(ω)K0;
P2(ω) = W2(ω)K0; ;
;
Сравним эффективность подавления сосредоточенной помехи в схеме фиг. 1 (или схеме фиг. 2 без знания корреляционной функции помехи) и предлагаемом устройстве (схема фиг. 4.).
Как показывает анализ формулы (27) для выше приведенного примера, энергетический спектр сигнала на выходе предлагаемого устройства практически не искажается по сравнению со спектром на входе при малых значениях RK (RK ≤ 0,3). Расчеты показывают, что шум на выходе при этом определяется слабо коррелированными спектральными составляющими сигнала, а наибольшее значение принимает на частотах вблизи максимума спектра сосредоточенной помехи. Отличие RL от 1 и RK от 0 приводит к небольшому снижению энергетического выигрыша η .
Сравнение зависимости η от отношения сигнал/шум на входе в предположении его одинаковости для обеих ветвей разнесения показывает, что в случае, когда при разнесенном приеме не выполняется строго условие RL = 1 и RK = 0, предлагаемое устройство в 2 раза эффективнее прототипа (фиг. 2.). При пренебрежении "белым" шумом и (Pс/Pш)вх. = 1, RL = 0,8; RK = 0,2 предлагаемое устройство обеспечивает η = 5, в то время как прототип имеет η = 2,5.
Моделирование на ЭВМ подтвердило сделанные выводы относительно эффективности подавления коррелированных помех предлагаемым устройством при любой форме энергетического спектра помехи.
Все введенные блоки (5-9) могут быть выполнены на той же элементной базе, что и блоки прототипа. Кроме того, современный уровень развития цифровых процессоров обработки сигналов (ЦПОС) в сочетании с быстро действующими АЦП и ЦАП позволяют сравнительно просто реализовать все операции над аналоговыми сигналами и дискретными последовательностями, описанные в представленных материалах.
ЛИТЕРАТУРА
1. Уидроу Б., Стирнз С. Адаптивная обработка сигналов: Пер. с англ. - М. : Радио и связь, 1989. - 440 с.
2. Сосулин Ю.Г. Теория обнаружения и оценивания стохастических сигналов. - М.: Сов. Радио, 1978. - 320 с.
3. Сухопутная подвижная радиосвязь: В 2 кн. Кн. 1. Основы теории / И.М. Пышкин, И.И. Дежурный, Р.Т. Пантикян и др.: Под ред. В.С. Семенихина и И.М. Пышкина. - М.: Радио и связь, 1990. - 340 с.
4. Туркин А.И. Рекуррентный прием сложных сигналов. - М.: Радио и связь, 1988. - 248 с.
5. Быков В.В. Цифровое моделирование в статистической радиотехнике. - М. : Сов. радио, 1971. - 328 с.
В адаптивном компенсаторе помех, предназначенном для использования в системах передачи сообщений по каналам связи, подверженных действию аддитивных коррелированных помех, для реализации корреляционного принципа выделения сосредоточенной помехи наряду с включением в канал выделения помехи первого и второго адаптивных фильтров предусмотрено использование блока формирования отсчетов корреляционной функции, первый и второй входы которого являются входами устройства, первый и второй выходы соединены с входами соответственно первого и второго адаптивных фильтрова, а третий выход соединен с первым входом блока вычисления коэффициентов управления адаптивных фильтров. Технический результат - улучшение качества адаптивного подавления помех, возможность работы в условиях априорной неопределенности относительно их свойств. 4 ил.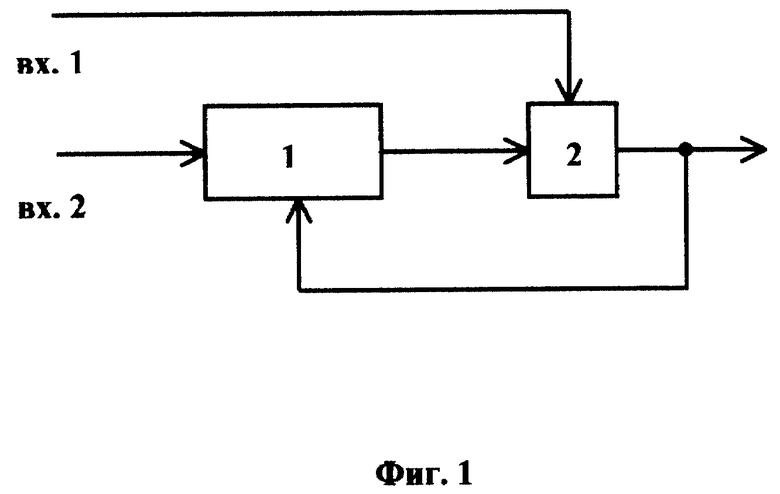
Устройство адаптивного подавления помех, содержащее первый и второй адаптивные фильтры и сумматор, выходы адаптивных фильтров соединены с первым и вторым входами сумматора, отличающееся тем, что введены блок вычисления отсчетов корреляционной функции, блок вычисления коэффициентов управления адаптивных фильтров, блок усреднения, масштабный блок, первый и второй сумматоры, причем входами устройства являются первый и второй входы блока вычисления отсчетов корреляционной функции, первый выход которого подключен к входу второго адаптивного фильтра и к первому входу первого сумматора, второй выход блока вычисления отсчетов корреляционной функции подключен к входу первого адаптивного фильтра и первому входу второго сумматора, третий выход блока вычисления отсчетов корреляционной функции соединен с третьим входом масштабного блока и первым входом блока вычисления коэффициентов управления адаптивных фильтров, второй вход которого соединен с выходом сумматора, а выход подключен к управляющим входам первого и второго адаптивных фильтров, выход сумматора соединен с первым входом масштабного блока, а через блок усреднения - со вторым входом масштабного блока, выход которого подключен ко вторым входам первого и второго сумматоров, выходы которых являются выходами всего устройства.
| УИДРОУ В | |||
| и др | |||
| Адаптивная обработка сигналов | |||
| - М.: Радио и связь, 1989, с.354, рис.13.15 | |||
| МИРСКИЙ Г.Я | |||
| Характеристики стохастической взаимосвязи и их измерения | |||
| - М.: Энергоиздат, 1987, с.120 - 123, рис | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Построение судового радиооборудования | |||
| /Под ред.Винокурова В.И | |||
| Л.: Судостроение, 1982, с.106, рис.5.2 | |||
| US 4105977, 08.08.1978. | |||
