Настоящее изобретение относится к памяти фрейма для использования в декодере подвижного изображения, в частности к памяти фрейма, которая может выполнять компенсацию движения с высокой скоростью, в котором синхронное динамическое запоминающее устройство с произвольной выборкой (СДЗУПВ) используется для хранения контрольного изображения.
В общем, такая система, как телевидение высокого разрешения или цифровой кассетный видеомагнитофон VCR, кодирует и декодирует цифровые звуковые и видеосигналы. Видеокодер выполняет ортогональное преобразование, квантование, кодирование переменной длины и оценку движения и компенсационное кодирование относительно входных видеосигналов.
Фиг. 1 изображает устройство для декодирования видеоинформации, закодированной вышеупомянутым видеокодером. На фиг. 1 представлен видеодекодер, декодер переменной длины 11 декодирует с переменной длиной полученные закодированные данные. Инверсный квантизатор 12 квантует с инверсией данные, декодированные с переменной длиной. Инверсный дискретный косинусный трансформатор (инверсный DCT) 13 трансформирует с инверсией квантованные данные в видеоданные, имеющие пространственную область. Компенсатор движения 14 считывает видеоданные макроблока, соответствующие вектору движения из памяти 15 фрейма, и выполняет компенсацию движения относительно видеоданных, полученных из инверсного DCT 13. Движение скомпенсированных видеоданных выводится в блок нижнего потока (не показано), а также сохраняется в памяти 15 фрейма, который будет использоваться для последующей компенсации движения. Здесь, используется вектор движения декодер 11 переменной длины, который поступает из кодера, вместе с закодированными видеоданными.
"Предсказание" должно считывать данные прогнозирующего макроблока, обозначенного вектором движения, из памяти фрейма 15. Существует два вида предсказания: первое - это "поле прогнозирования" относительно контрольного изображения поля, сохраненного в памяти фрейма 15; и другое - "прогнозирование фрейма" относительно контрольного изображения фрейма, сохраненного в памяти фрейма 15. Тем временем изображение классифицируется в "изображение поля", которое декодируется или кодируется в модулях поля, и "изображение фрейма", которое декодируется или кодируется в модулях фрейма. Также два изображения поля, соответствующие одному фрейму, составляются из верхнего поля и нижнего поля. Изображение поля используется только для прогнозирования поля, изображение фрейма используется как для прогнозирования поля, так и для предсказания фрейма. Чтобы обрабатывать такое предсказание без задержки, данные, сохраненные в памяти фрейма 15, должны быстро считываться. Однако, поскольку количество передвижения данных между изображениями становится больше, большее количество данных должно считываться из памяти 15 фрейма. В результате, требуется, чтобы память 15 фрейма быстро осуществляла вывод сохраненных данных.
Краткое содержание изображения
Целью настоящего изобретения является обеспечение декодера подвижного изображения, выполняющего предсказание компенсации движения с высокой скоростью, с использованием СДЗУПВ, которое функционирует даже на частоте около 100 МГц в качестве памяти фрейма.
Другая цель настоящего изобретения заключается в том, чтобы обеспечить способ записи видеосигнала с одним фреймом с целью согласования с особенностями СДЗУПВ.
Для того, чтобы достигнуть вышеупомянутую цель настоящего изобретения, необходимо обеспечить декодер подвижного изображения, использующий СДЗУПВ в качестве памяти фрейма.
В заявленном способе записи видеосигнала с одним фреймом видеосигнал содержит множество вырезок, которые включают в себя множество макроблоков.
Согласно заявленному способу записи видеосигнала с одним фреймом дополнительно присваивают одну вырезку видеосигнала области, состоящей из 128 колонок и N рядов (N - натуральное число) в СДЗУПВ посредством присваивания следующего ряда N рядов СДЗУПВ для каждых восьми макроблоков в каждой вырезке видеосигнала из множества вырезок.
Заявленный способ записи видеосигнала с одним фреймом дополнительно предусматривает также этап присвоения идентичного адреса ряда для восьми макроблоков в каждой из четырех вырезок видеосигнала посредством присвоения банка СДЗУПВ для записи каждой второй вырезки видеосигнала.
Краткое описание чертежей
В дальнейшем изобретение поясняется конкретным вариантом его воплощения со ссылками на сопроводительные чертежи, на которых:
фиг. 1 - блок-схема основного декодера подвижного изображения;
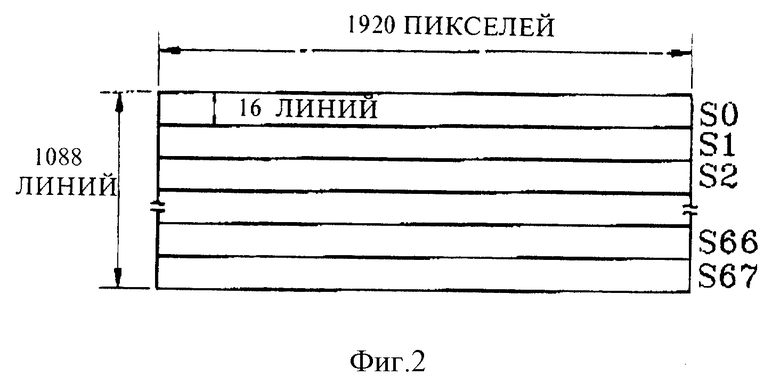
фиг. 2 - изображает видеоданные основного одного фрейма;
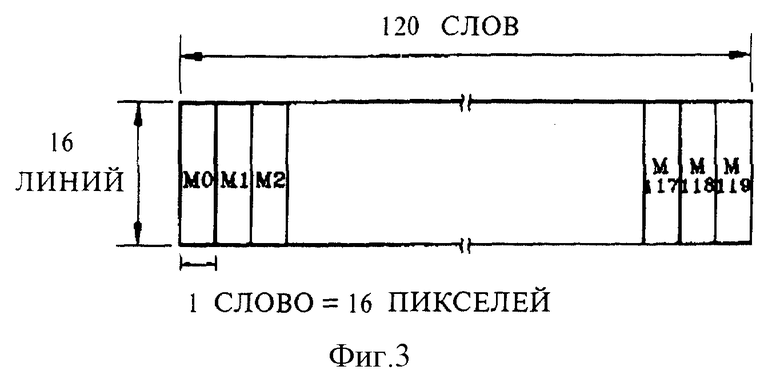
фиг. 3 - изображает видеоданные с одной пластиной, показанной на фиг. 2;
фиг. 4 - изображает структуру СДЗУПВ согласно настоящему изобретению;
фиг. 5 - изображение, объясняющее способ расположения видеоданных одного макроблока в СДЗУПВ согласно настоящему изобретению;
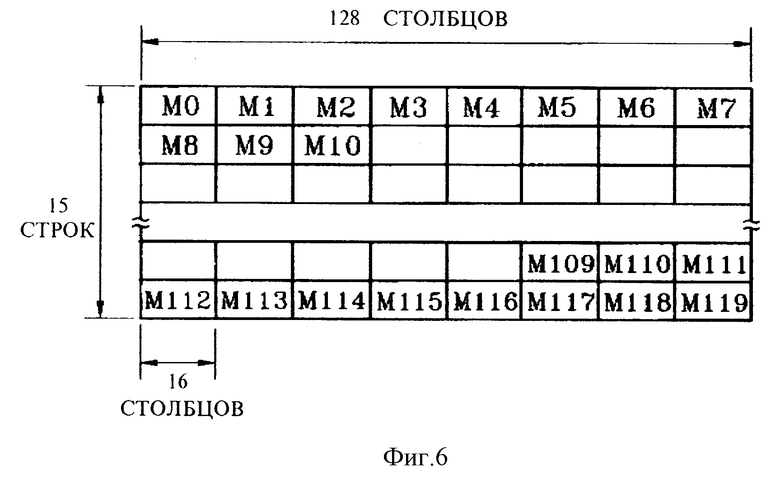
фиг. 6 - изображение, объясняющее способ расположения видеоданных с одной пластиной в СДЗУПВ согласно настоящему изобретению;
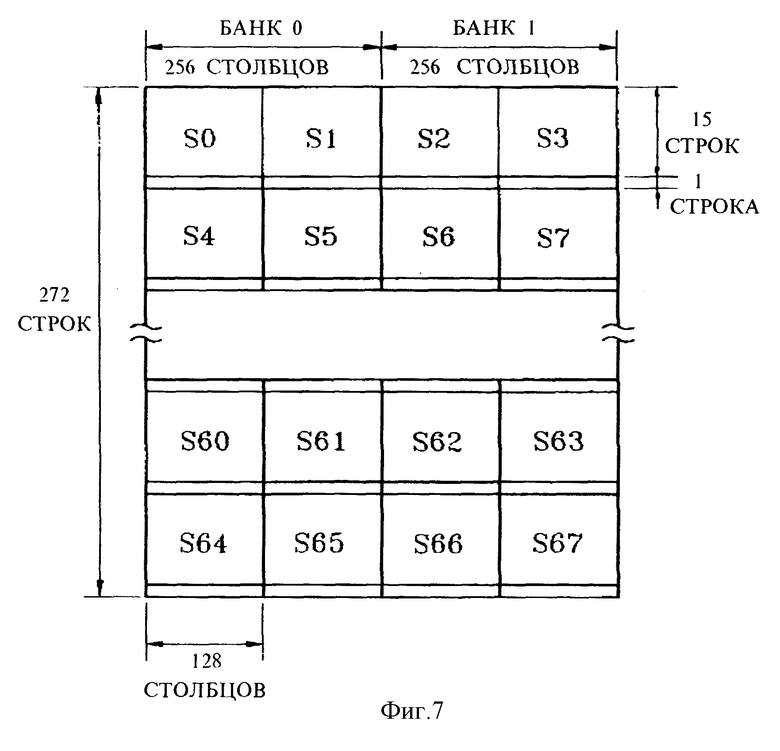
фиг. 7 - изображение, объясняющее способ расположения видеоданных с одним фреймом в СДЗУПВ согласно настоящему изобретению;
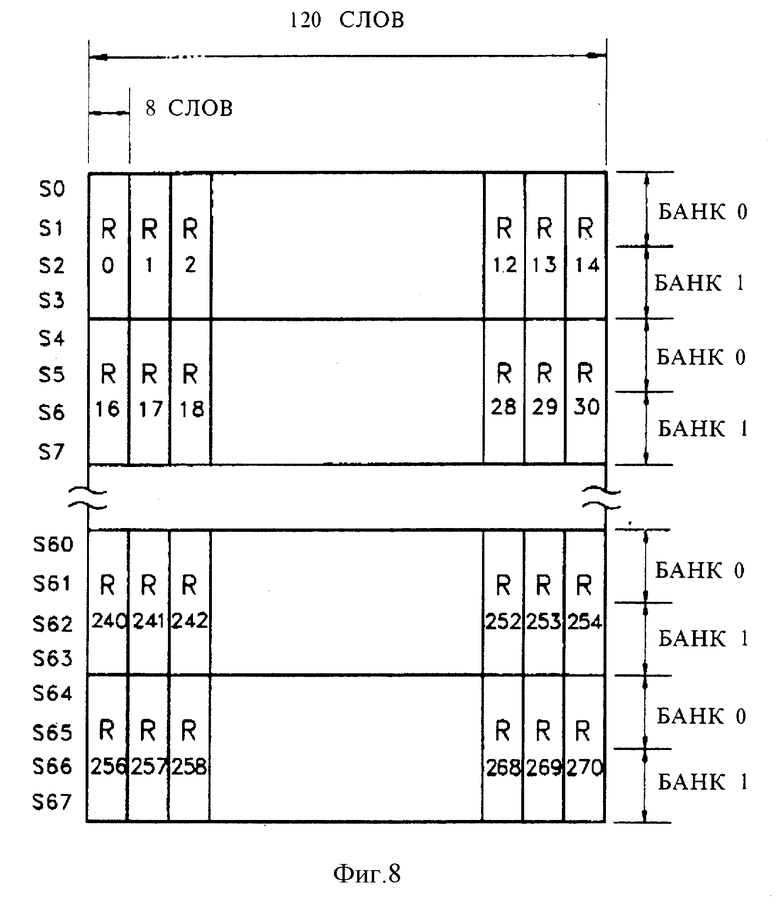
фиг. 8 - изображение, объясняющее способ расположения видеоданных с одним фреймом в СДЗУПВ, с точки зрения данных;
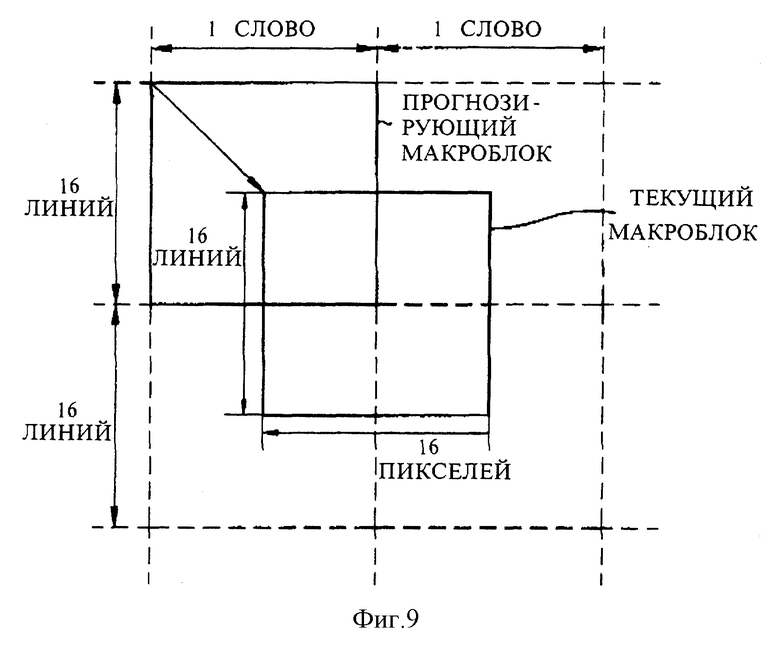
фиг. 9 - концептуальная диаграмма для объяснения прогнозирующего макроблока, обозначенного вектором движения в модулях целочисленных пикселей;
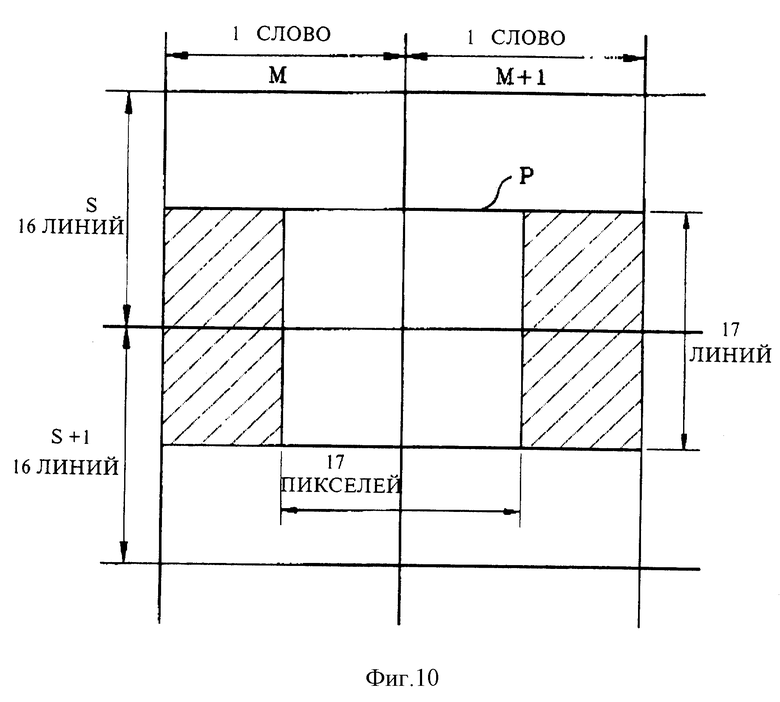
фиг. 10 - концептуальная диаграмма для объяснения прогнозирующего макроблока, обозначенного вектором движения в модулях полупикселей;
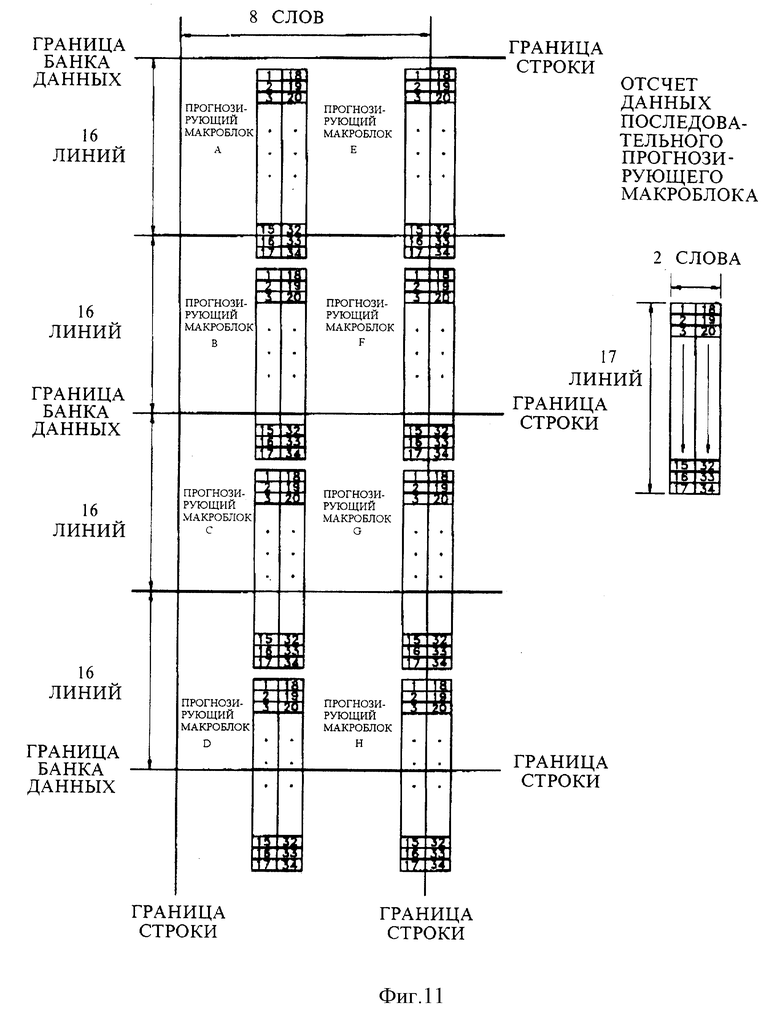
фиг. 11 - показывает вариант воплощения предсказания фрейма в изображении фрейма;
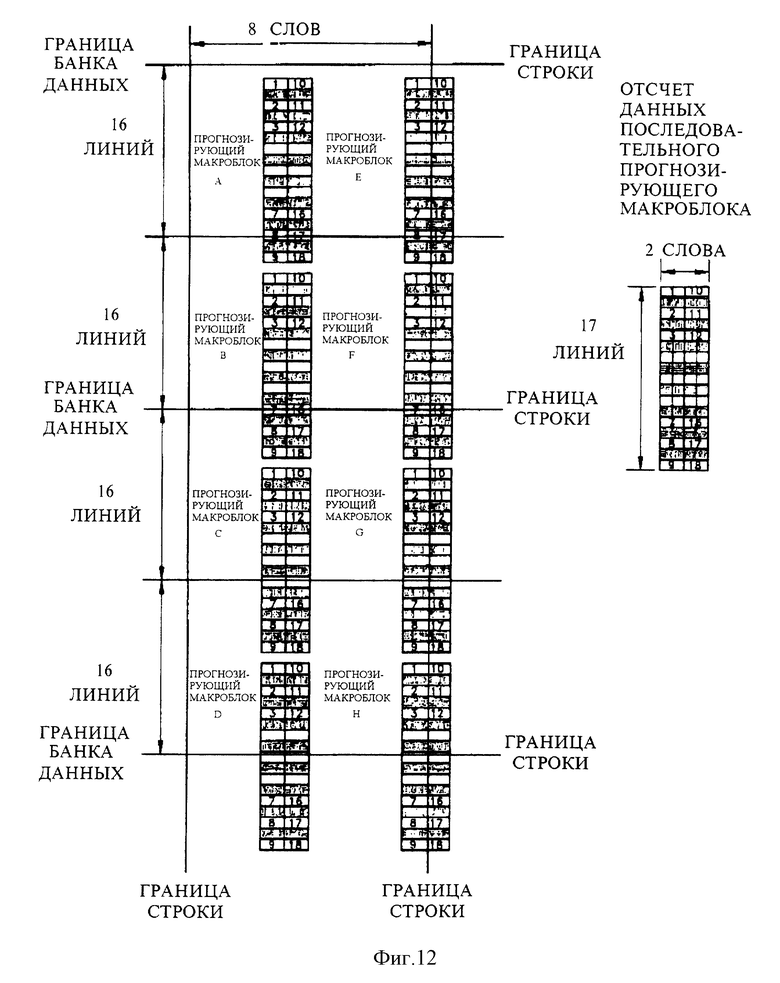
фиг. 12 - изображает вариант воплощения предсказания поля в изображении фрейма;
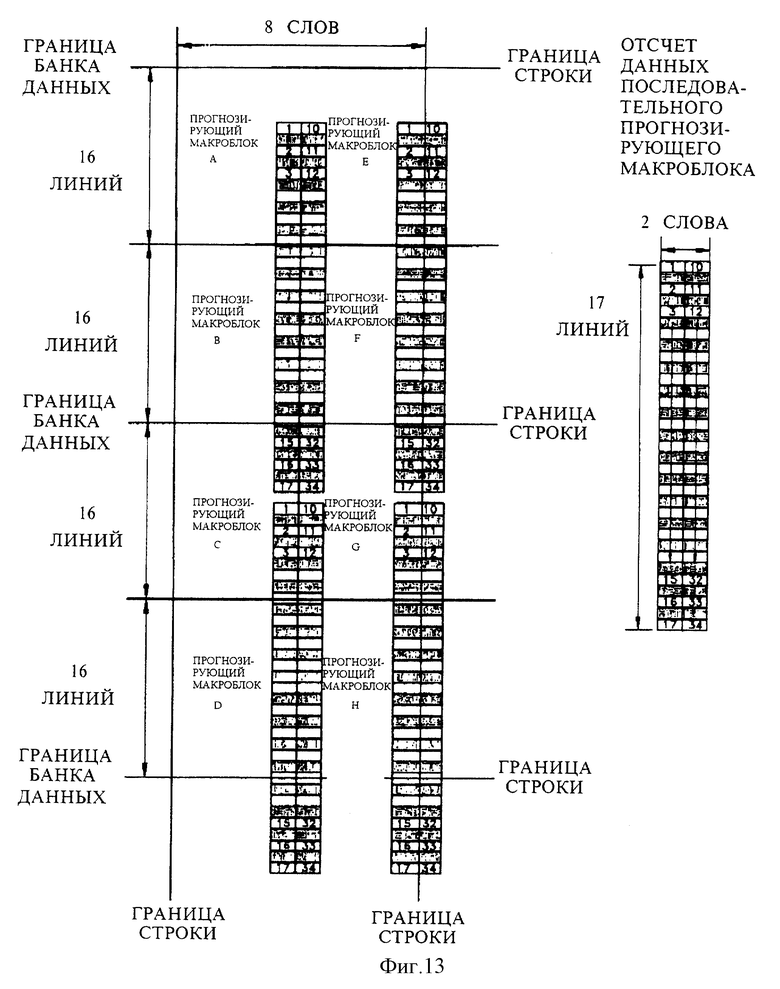
фиг. 13 - изображает вариант воплощения предсказания поля в изображении поля;
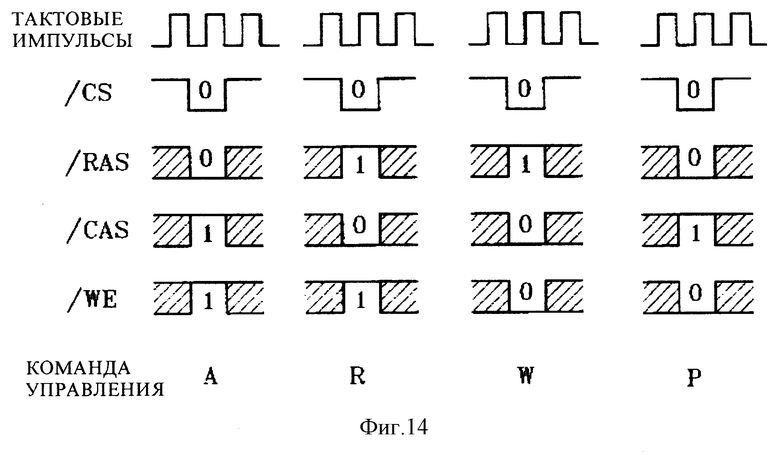
фиг. 14 - диаграмма синхронизации, показывающая команды управления, которые следуют из комбинации сигналов ввода управления в СДЗУПВ;
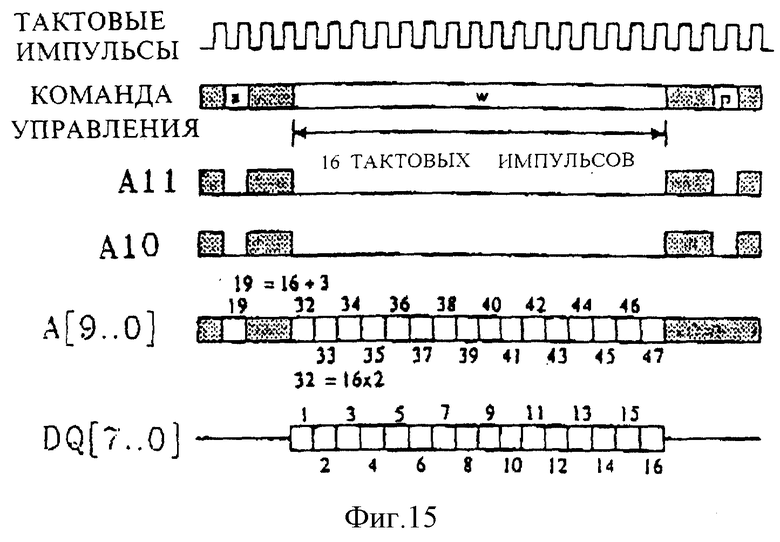
фиг. 15 - диаграмма синхронизации, объясняющая операцию записи записываемых видеоданных с одним макроблоком относительно СДЗУПВ согласно настоящему изобретению;
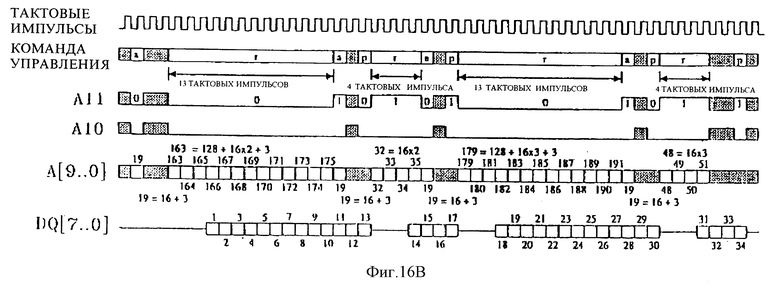
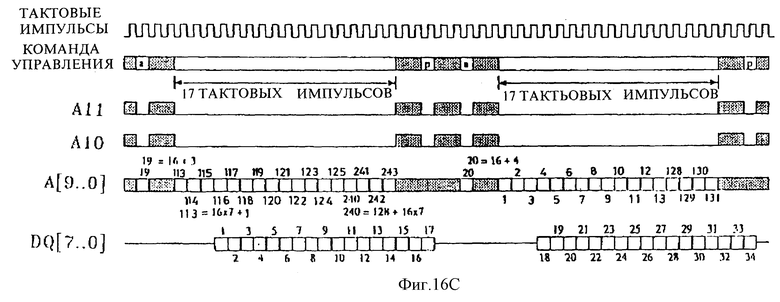
фиг. 16А-16С - диаграммы синхронизации, объясняющие операции считывания считывающей части прогнозирующих макроблоков, показанных на фиг. 11;
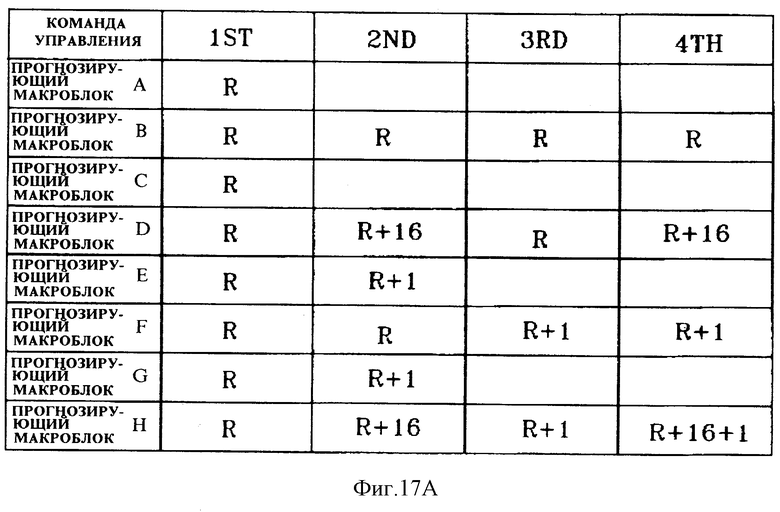
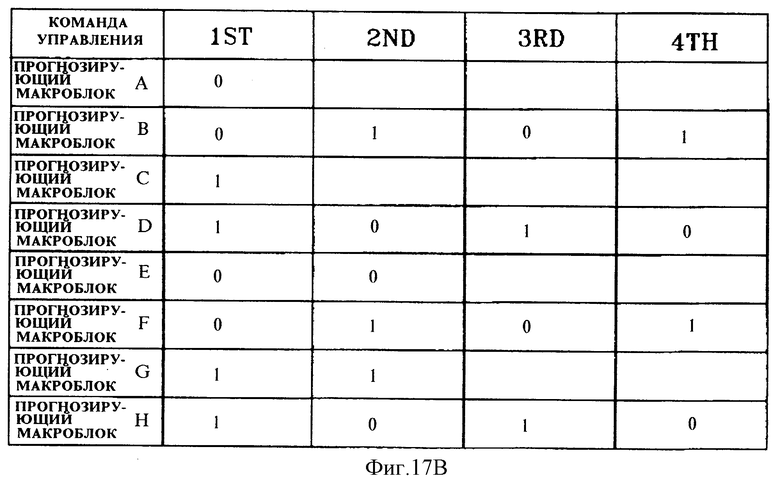
фиг. 17А и 17В - таблицы, показывающие изменение адресов строки и банка каждого блока, показанного на фиг. 11;
фиг. 18А и 18В - вид, изображающий связь между адресами столбца прогнозирующего макроблока и связь между адресами столбца фактической памяти.
Подробное описание предпочтительного варианта воплощения изобретения
Фиг. 2 и 3 - изображения, объясняющие структуру одного фрейма закодированных в цифровой форме видеоданных. На фиг. 2, один фрейм составлен из горизонтальных 1920 пикселей и вертикальной 1088 линий, и одна вырезка фрейма составлена из горизонтальных 1920 пикселей и вертикальных 16 линий внутри одного фрейма. То есть, один фрейм составлен из 68 вырезок SO-S67. Предполагая, что 16 горизонтальных пикселей - это одно слово, один макроблок, состоящий из (16х16) пикселей в горизонтальных и вертикальных направлениях, можно изображать в качестве горизонтального одного слова, умноженного на 16 вертикальных линий. Таким образом, одна вырезка видеосигнала состоит из 120 макроблоков МО-М119, как показано на фиг. 3.
Фиг. 4 изображает структуру СДЗУПВ, которая используется в настоящем изобретении. Основная особенность СДЗУПВ заключается в том, что все сигналы работают с синхронизацией тактовым импульсом. Таким образом, в отличие от других запоминающих устройств с произвольной выборкой (ЗУПВ), которые работают в течение интервала времени, определяемого посредством длительности импульса сигнала управления, СДЗУПВ вырабатывает сигнал управления для выполнения соответствующей операции синхронной с тактовым импульсом. Память фрейма обрабатывает данные модуля слова, например, 16 бит в этом варианте воплощения. Соответственно можно сконструировать память фрейма посредством 8 СДЗУПВ, каждая из которых имеет 16-битовую шину данных параллельных друг другу.
Как показано на фиг. 4, СДЗУПВ состоит из двух банков, каждый из которых имеет 256 столбцов на 2048 строк. В таком СДЗУПВ адрес строки определяется 11-битовыми выводами А10-АО, и адрес столбца определяется 8-битовыми входными выводами А[7...0]. Адрес банка также определяется входным выводом A11. В следующем описании, адрес строки представляется как R[], и адреса столбцом представляется как С[].
Фиг. 5-8 - виды, объясняющие изображения расположения видеоданных одного фрейма в СДЗУПВ согласно настоящему изобретению. Как показано на фиг. 5, один макроблок видеоданных, представленный как одно слово на 16 линий, устанавливается в горизонтальных 16 столбцах на вертикальной одиночной строке SDRAM. Так как последовательные восемь макроблоков расположены на той же самой строке, видеоданные с одной пластиной располагается в 128 столбцах на 15 строках в СДЗУПВ, как показано в фиг. 6. Последовательные две вырезки устанавливаются в тот же самый банк СДЗУПВ. Последовательные четыре вырезки расположены в 512 столбцах на 15 строках в СДЗУПВ. Затем, следующие последовательные четыре вырезки располагаются с пробелом с одной строкой из предыдущих последовательных четырех вырезок. Другими словами, одна строка располагается для каждой другой последовательной структуры с четырьмя вырезками. Соответственно, 255 адресов строки фактически предназначены видеоданным с одним фреймом среди 272 адресов строки, представляемых уравнением в виде
R=16i=j
где i - натуральное число от 0 до 16 и j - натуральное число от 0 до 14.
Таким образом, видеоданные, имеющие 68 вырезок SO-S67, т.е., видеоданные с одним фреймом, располагаются для согласования размера СДЗУПВ, как показано на фиг. 7. Если видеоданные расположены в СДЗУПВ, как показано на фиг. 7, восемь макроблоков, содержащиеся в четырех вырезках имеют тот же самый адрес строки в СДЗУПВ. Фиг. 7 изображает расположение вырезок видеоданных в СДЗУПВ, и фиг. 8 изображает соотношение между адресом строки и словом СДЗУПВ относительно видеоданных с одним фреймом. Восемь макроблоков, имеющих такие же адреса, которые показаны на фиг. 7, изображены в качестве восьми слов, имеющих такие же адреса строк, которые показаны на фиг. 8.
Фиг. 9 представляет собой концептуальную диаграмму для объяснения прогнозирующего макроблока, обозначенного вектором движения в целочисленных модулях. В случае, когда вектор движения изображает даже модули с половинными пикселями, необходимо, чтобы прогнозирующий макроблок имел видеоданные с одним горизонтальным пикселем и с одной вертикальной линией по сравнению с макроблоком, имеющим размер 16 на 16 пикселей при выполнении компенсации движения. В этом случае, прогнозирующий макроблок имеет размер, равный двум горизонтальным словам и 17 вертикальным линиям, как показано на фиг. 10. Когда вертикальные составляющие вектора движения постоянны, и горизонтальные составляющие поэтому изменяются в диапазоне 0-15, прогнозирующий макроблок, имеющий размеры (17х17), изменяется внутри области прогнозирующего макроблока, обозначенного в виде "р" и соседними заштрихованными областями, показанными на фиг. 10. В этом случае, используемые для считывания видеоданных из памяти макроблоки не изменяются. Так как, методика компенсации движения, использующая вектор движения даже с модулем половинного пикселя хорошо известна, подробное описание этого будет опущено.
Фиг. 11-13 представляет собой виды для объяснения последовательности считывания видеоданных, хранящихся в СДЗУПВ вместе с различными видами прогнозирования. Видеоданные, имеющие 8 слов на 64 линии, которые показаны на фиг. 11-13, имеют какой-либо один адрес строки, который показан на фиг. 8. Фиг. 11 изображает возможное устройство прогнозирующего макроблока относительно изображения фрейма, которое используется для прогнозирования фрейма. Фиг. 12 изображает возможное устройство прогнозирующего макроблока относительно изображения фрейма, используемого для прогнозирования поля. Например, фиг.12 использует то же самое изображение фрейма, как на фиг. 11, поэтому считывание макроблоков для предсказания аналогично фиг. 11. Однако, так как предсказание выполняется в модулях поля, данные считывают одну линию на две линии. Фиг. 13 изображает вариант воплощения предсказания поля в изображении поля. Одна пластина изображения поля занимает то же самое пространство памяти, как и две вырезки изображения фрейма. Таким образом, изображение поля располагается в одной вырезке (не в двух вырезках) внутри того же самого адреса строки и адреса банка, как на фиг. 7. Таким образом, видеоданные двух линий относительно одиночного слова читаются 17 раз выше 34 линий, как показано на фиг. 13.
Фиг. 14 - диаграмма синхронизации, показывающая команды управления, следующие из комбинации входных сигналов управления СДЗУПВ. Входные сигналы управления представляют собой сигнал выборки чипа /CS для предоставления СДЗУПВ, сигнал строба адреса строки /RAS и сигнал строба адреса столбца /CAS, соответственно представляющие, что входной адрес - это эффективный адрес строки и адрес столбца, и сигнал предоставления записи /WE для записи данных в соответствующем адресе. Команды управления, показанные на фиг. 14, такие как сигнал низкого действия (а), сигнал чтения (r), сигнал записи (w) и сигнал предразряда (р), составляются согласно комбинации входных сигналов управления. Ряд сигналов команд управления, составленный из этих команд управления, используется для контроля СДЗУПВ.
Операции записи и считывания видеоданных в и из СДЗУПВ, использующие этот сигнал команды управления, будут описаны ниже. Что касается адресов строки, представленных в виде уравнения
R=16i=j
и адресов столбца, представленных в виде уравнения
С = 128k + 161,
где k - натуральное число от 0 до 3 и
1 - натуральное число от 0 до 7.
Фиг. 15 представляет собой временную диаграмму, операции записи видеоданных макроблока с компенсацией движения в СДЗУПВ. На фиг. 15, данные двадцать седьмого макроблока М26 в пятой пластине S4 записываются в позицию памяти, имеющую адрес строки от
19 (= 16 • 1+ 3)
и адрес столбца от
32 (= 16 • 2),
видеоданные с одним макроблоком синхронизированы с 16 тактовыми импульсами и записаны на соответствующие позиции в SDRAM.
Операция чтения прогнозирующих макроблоков видеоданных из СДЗУПВ будет описана соответственно на фиг. 16А-16С.
Фиг. 16А - это временная диаграмма для чтения прогнозирующего макроблока А, показанного на фиг. 11. Прогнозирующий макроблок фиг. 11 принадлежит соответствующим макроблокам, имеющим те же самые адреса банка и строки. Соответственно, 34 сигнала данных DQ[7.0] (=17 линий, на 2 слова) считываются в течение генерации 34 тактовых импульсов, использующих такие команды, как сигнал низкого действия (а), сигнал записи (r) и сигнал предразряда (р), показанный совместно с прогнозирующим макроблоком А на фиг. 17А и 17В. Здесь первый адрес столбца в первую очередь считываемого соответствующего макроблока становится
33 (=16 x 2 + 1)
Данные шестнадцатой линии в прогнозирующем макроблоке А принадлежат пластине, отличной от пластины пятнадцатой линии. Таким образом, адрес столбца шестнадцатых данных становится
160 (= 128 +16•2),
но не 46. Если шестнадцатые и седьмые данные линии полностью считываются, то считывается следующее слово, принадлежащее к прогнозирующему макроблоку А, в котором адрес столбца становится
49 (= 16•3+1).
Фиг. 16В - это временная диаграмма для считывания прогнозирующего макроблока В фиг. 11. Прогнозирующий макроблок В (фиг. 11) имеет один адрес строки и два адреса банка, как показано на фиг. 17А и 17В, чей стартовый адрес столбца становится
163 (= 128 + 16 • 2• 3).
Затем, когда вторые данные слова, принадлежащие к прогнозирующему макроблоку В считываются, адрес банка изменяется, чтобы таким образом начать считывать данные, которые стартуют из данных, имеющих адрес столбца
179 (= 12 + 16•3 + 3).
Когда данные линии, чей адрес банка изменяется внутри того же самого прогнозирующего макроблока, считываются как в данных четырнадцатой линии в прогнозирующем макроблоке В, память, имеющая структуру одиночного банка, считывает 13 сигналов данных и затем запрашивает команды сигнала низкого действия (а) для чтения данных, начинающихся из данных четырнадцатой линии после получения команды сигнала предразряда (р). Однако настоящее изобретение использует СДЗУПВ, имеющую два банка, чтобы таким образом посылать команду сигнала низкого действия (а) для чтения данных, записанных во втором банке в течение продолжительности пустого тактового импульса между сигналом считывания (r) и сигналом предразряда (р). Таким образом, если используется такая структура банка при чередовании банка, то можно сохранить использованное время, когда данные считываются и записываются.
Фиг. 16С - это временная диаграмма для считывания прогнозирующего макроблока Е, изображенного на фиг. 11.
Прогнозирующий макроблок Е фиг. 11 имеет различные адреса строки в двух словах, как показано на фиг. 17А и 17В. Следовательно, команды типа низкого активного сигнала (а), сигнала чтения (r) и сигнала предразряда (р) требуются при считывании каждого слова. Так как операция считывания данных, принадлежащих к прогнозирующему макроблоку Е понятна человеку, квалифицированному в технике из вышеупомянутых примеров, то подробное описание этого будет опущено. Описанные выше примеры фиг. 16А-16С используют СДЗУПВ, которое спроектировано таким способом, что сигнал строба с адресом столбца /CAS отключается тремя тактовыми импульсами, прежде чем обработка данных становится эффективной.
Фиг. 17А и 17B - это таблицы, показывающие изменения адресов строки и банка каждого прогнозирующего макроблока, показанного на фиг. 11.
Фиг. 17А изображает изменение адресов строки относительно команд управления (а).
Фиг. 17В показывает изменение адресов банка относительно команд управления (a), (r) и (p). Здесь R представляет адрес строки, где операция считывания начинается в прогнозирующем макроблоке. Прогнозирующий макроблок Н (фиг. 11) имеет два слова с различными адресами строки, в которых адрес банка изменяется в середине прогнозирующего макроблока. Если адрес строки, начинающий считывать прогнозирующий макроблок Н, равен R при изменении адреса банка от "1" до "0", вырабатываются вторые команды (a), (r) и (p). В этом случае, адрес строки станет равным "R+ 16". Если адрес банка изменяется снова до "1", то вырабатываются третьи команды (a), (r) и (p), когда адрес строки становится равным "R + 1", который больше на единицу адреса первой строки "R". Затем, если адрес банка изменяется до "0", вырабатываются четвертые команды управления (a), (r) и (p), когда адрес строки становится равным
R+16+1.
Если адрес строки равен R [10...0], то адрес строки в прогнозировании фрейма представляется в виде:
R[10...0] = Fp[10...0] + Sp [6...2] x 16+ Мр[6...3],
где Ep - прогнозирующий адрес фрейма, Sp - адрес пластины
Мр - прогнозирующий адрес макроблока, которые выражаются следующими уравнениями:
Sp [] = Sc [1+ Vy[7...4], и Мр []= Me []+ Vx[7...4],
где Sc [] и Me [] - текущий адрес пластины и текущий адрес макроблока, соответственно.
Vx [] и Vy [] - векторы движения горизонтальных и вертикальных составляющих, соответственно.
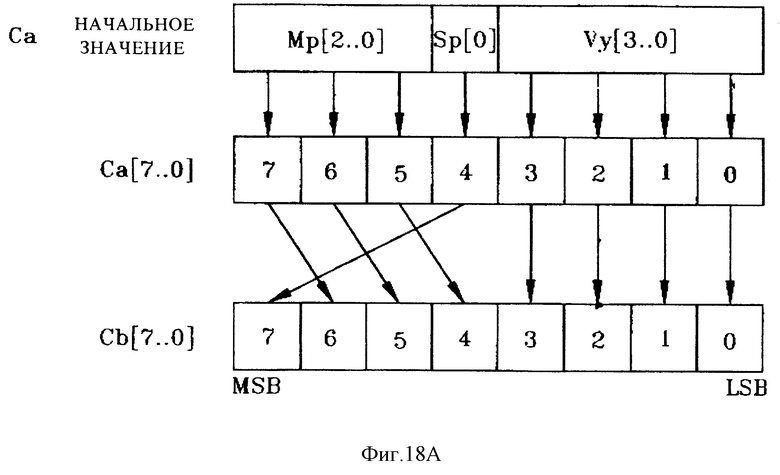
Строка изменяется в модулях из восьми макроблоков. Таким образом, адрес строки не оказывает влияния при числе блоков меньше восьми. Строка также изменяется в модулях из четырех пластин в случае, при котором адрес строки не оказывает влияния при числе пластин меньше четырех, Sp[l] среди бит, которые не используются в адресе пластины, включается с адресом банка. Sp [0] и Мр [2. . .0], которые не использованы в вышеописанных примерах, используются как адреса столбцов, которые будут описаны со ссылкой на фиг. 18А и 18В. В случае занесенного в файл прогнозирования, адрес строки представляется в виде
R[10...0] = Fp(10...0] + Sp [5...1] (16+ Mp [6...3].
Фиг. 18A и 18В - вид, показывающий, как адреса столбца прогнозирующего макроблока соответствуют адресам фактической памяти. Фиг. 18А представляет случай предсказания фрейма. Адрес столбца прогнозирующего макроблока составляется из восьми битов, в которых четыре более низких бита используются как более низкие биты Vy[3. ..0] вертикального вектора движения. Пятый бит из самого младшего бита 9(LSB) используется как LSB Sp[0] прогнозирующего адреса пластины, и три более высоких бита используются как три более младших бита Мр [2..] прогнозирующего адреса макроблока. Са - это значение счетчика, в котором принимается начальный адрес столбца прогнозирующего макроблока и увеличивается значение счетчика на один для каждого тактового импульса на интервале команды управления (r). Сb также представляет адрес столбца фактической памяти, соответствующей значению счетчика Сa. Тот факт, что адрес столбца фактической памяти не равен значению счетчика, которое увеличивается на один, объясняется вышеописанным способом обработки видеосигнала согласно настоящему изобретению. То есть, если вертикальный вектор движения становится больше 16 линий, то следующие из приращения значения счетчика на единицу изменяют адрес вырезки. Затем, после считывания одного слова, адрес макроблока увеличивается на восемь. Однако адрес столбца, присвоенный фактической памяти, заменяет адрес вырезки после восьми макроблоков, каждый из которых имеет 16 переходов линий. Выбирая прогнозирующий макроблок А (фиг. 11) в качестве примера, шестнадцатые данные считываются синхронно с шестнадцатым тактовым импульсом. То есть, данные 16 линий одного слова считываются, когда значение счетчика Сa равно 16. Однако фактический адрес столбца шестнадцатой линии становится равным единице после перехода восьмого макроблока из адреса столбца пятнадцатой линии. Таким образом, требуется счетчик для создания начального значения адреса столбца, соответствующего адресу фактической памяти.
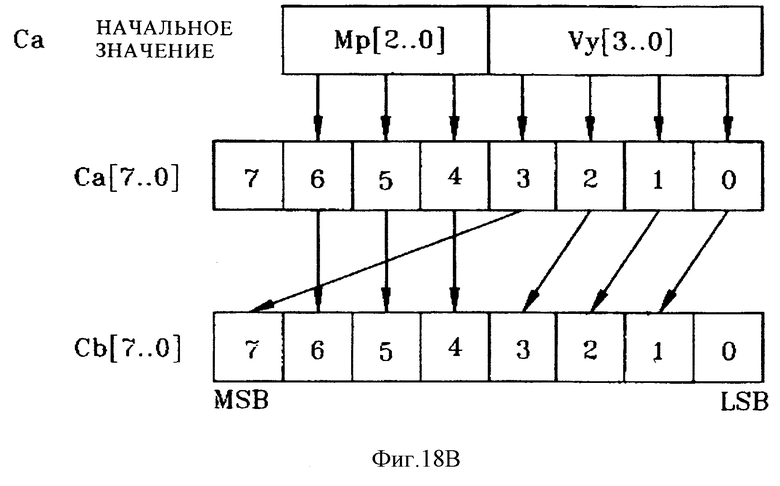
Фиг. 18B изображает, как адрес столбца прогнозирующего макроблока в течение предсказания поля соответствует адресу фактической памяти. Как представлено на фиг. 11 и 13, одна вырезка изображения поля присвоена той же самой области памяти, как области двух вырезок в изображении фрейма. Таким образом, в случае изображения поля, граница вырезки - это та же самая граница банка, которая не требует прогнозирующего адреса пластины Sp [], показанного на фиг. 18А. Таким образом, если вертикальный вектор движения становится больше 16 линий, изменяется адрес банка. Затем, наименее значительный бит Сb (0] в адресе столбца памяти используется для различения верхнего поля и нижнего поля.
В вышеописанном варианте воплощения настоящего изобретения, одно слово определяется как горизонтальные 16 пикселей одного фрейма. Однако можно составить одно слово с двумя, четырьмя или восемью пикселями.
Как описано выше, память фрейма в декодере подвижного изображения согласно настоящему изобретению воплощает использование СДЗУПР, которое может функционировать с высокой скоростью, в котором данные подвижного изображения с одним фреймом расположены соответственно СДЗУПВ, позволяя, таким образом, проводить обработку сложных предсказаний компенсации движения, использующей память фрейма.



Изобретение относится к технике декодеров подвижного изображения. Декодер содержит запоминающее устройство группы данных для запоминания эталонного изображения, используемого для компенсации движения, синхронное динамическое запоминающее устройство с произвольной выборкой, компенсатор движения, в котором синхронное динамическое запоминающее устройство с произвольной выборкой выполнено с возможностью считывать и записывать данные группы данных. Техническим результатом изобретения является создание декодера, выполняющего предсказание компенсации движения с высокой скоростью, и создание способа записи видеосигнала с одним фреймом в синхронное динамическое запоминающее устройство с произвольной выборкой. 2 с. и 7 з.п. ф-лы, 18 ил.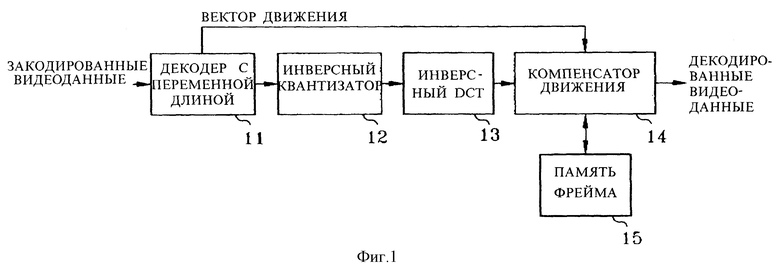
R = 16i + j,
где 0 ≤ i ≤ 16 и
где 0 ≤ i ≤ 14
9. Способ записи группы данных видеосигнала в синхронном динамическом запоминающем устройстве с произвольной выборкой (СДЗУПВ) по п.8, отличающийся тем, что адреса колонок для записи макроблоков определяют по следующему уравнению:
C = 128k + 161,
где 0 ≤ k ≤ 3 и 0 ≤ 1 ≤ 7.
| SU 1192167 A, 15.11.1985 | |||
| Способ передачи и приема неподвижных изображений по узкополосным каналам связи | 1980 |
|
SU1121787A1 |
| US 5168356 A, 19.05.1991 | |||
| Способ н.а.алпатьева рулонной реверсивной прокатки ленты | 1972 |
|
SU458344A2 |
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| Устройство для приема телевизионного сигнала в сокращенной полосе частот | 1981 |
|
SU1125777A1 |

