Изобретение относится к электропроводам и может быть использовано для управления моментом на валу механизмов с повышенными требованиями к уровню пульсаций вращающего момента при работе на малых частотах вращения, в частности, в качестве электроусилителя руля автомобиля для снижения усилия на руле при маневрах на малых скоростях движения, а также при повороте колес неподвижного автомобиля.
Известно техническое решение, содержащее электродвигатель постоянного тока, управляемый от блока управления по сигналу датчика момента на валу механизма, датчик момента на валу механизма, редуктор, электромагнитную муфту, разъединяющую приводимый во вращение механизм с электродвигателем, систему диагностики (Патент США N 4660671).
Недостатком данного технического решения является необходимость применения электромагнитной муфты, а также плохое охлаждение двигателя постоянного тока вследствие закрытого исполнения. Необходимость использования муфты обусловлена тем, что при больших частотах вращения механизма с выключенным электродвигателем происходит торможение якоря за счет трения щеток об коллектор.
Известно техническое решение, содержащее датчик момента, измеряющий момент на руле и обеспечивающий соответствующие выходные сигналы, средство для обеспечения сигнала требуемого компенсирующего момента, имеющего величину, функционально связанную с моментом, приложенным к рулю, электродвигатель, содержащий зубчатый статор с обмотками и зубчатый безобмоточный ротор, кинематически связанный с рулем и способный, при необходимости, создать требуемый компенсирующий момент для снижения усилия на руле, датчик скорости автомобиля, измеряющий скорость автомобиля и обеспечивающий соответствующие выходные сигналы, датчик положения ротора электродвигателя, регистрирующий угловое положение ротора относительно статора и обеспечивающий соответствующие выходные сигналы, датчик скорости вращения ротора электродвигателя, измеряющий скорость вращения и обеспечивающий соответствующие выходные сигналы, блок управления электродвигателем, вырабатывающий на основе поступающих в него сигналов от датчика скорости вращения ротора, датчика положения ротора, датчика скорости движения автомобиля и датчика момента силовых управляющих сигналов для обмоток электродвигателя. На основе сигнала датчика скорости вращения ротора реализуется управление токами электродвигателя, обеспечивающее высокий уровень выходных характеристик. В частности, таким образом решается проблема значительного снижения пульсаций момента на валу четырехфазного реактивного индукторного электродвигателя и соответствующих вибраций руля (Патент США N 5623409).
Недостатком данного технического решения является необходимость применения в данном сервоприводе датчика скорости вращения ротора электродвигателя. Датчик скорости вращения представляет собой достаточно сложный узел, к точности и качеству выходных сигналов которого предъявляются высокие требования. Его применение повышает стоимость сервопривода и увеличивает его габариты.
Предлагаемое изобретение направлено на упрощение конструкции сервопривода за счет применения трехфазного реактивного индукторного электродвигателя со специально сформированной геометрией зубцовой зоны.
Решение указанной задачи обеспечивается устройством сервопривода, содержащего датчик момента на валу механизма, электродвигатель, кинематически связанный с валом механизма и содержащий зубчатый статор с обмоткой и зубчатый безобмоточный ротор, датчик положения ротора электродвигателя, блок управления электродвигателем, задающее устройство, формирующее необходимые сигналы для блока управления электродвигателем, в котором, согласно изобретению электродвигатель выполнен трехфазным с числом зубцов на статоре - 12, на роторе - 8, магнитная система электродвигателя выполнена со взаимным скосом зубцов ротора и статора на величину (0,05...0,25)t2, при этом ширина коронки зубцов статора по воздушному зазору bz1 = (0,3...0,36)t2, а ротора - bz2 = (0,39...0,45)t2, где t2 - зубцовый шаг по ротору.
В дальнейшем изобретение поясняется конкретным примером выполнения применительно к электроусилителю руля автомобиля со ссылкой на чертежи, на которых показаны:
Фиг. 1 - структурная схема электроусилителя руля автомобиля;
Фиг. 2 - сервопривод в разрезе;
Фиг. 3 - поперечное сечение трехфазного реактивного индукторного электродвигателя;
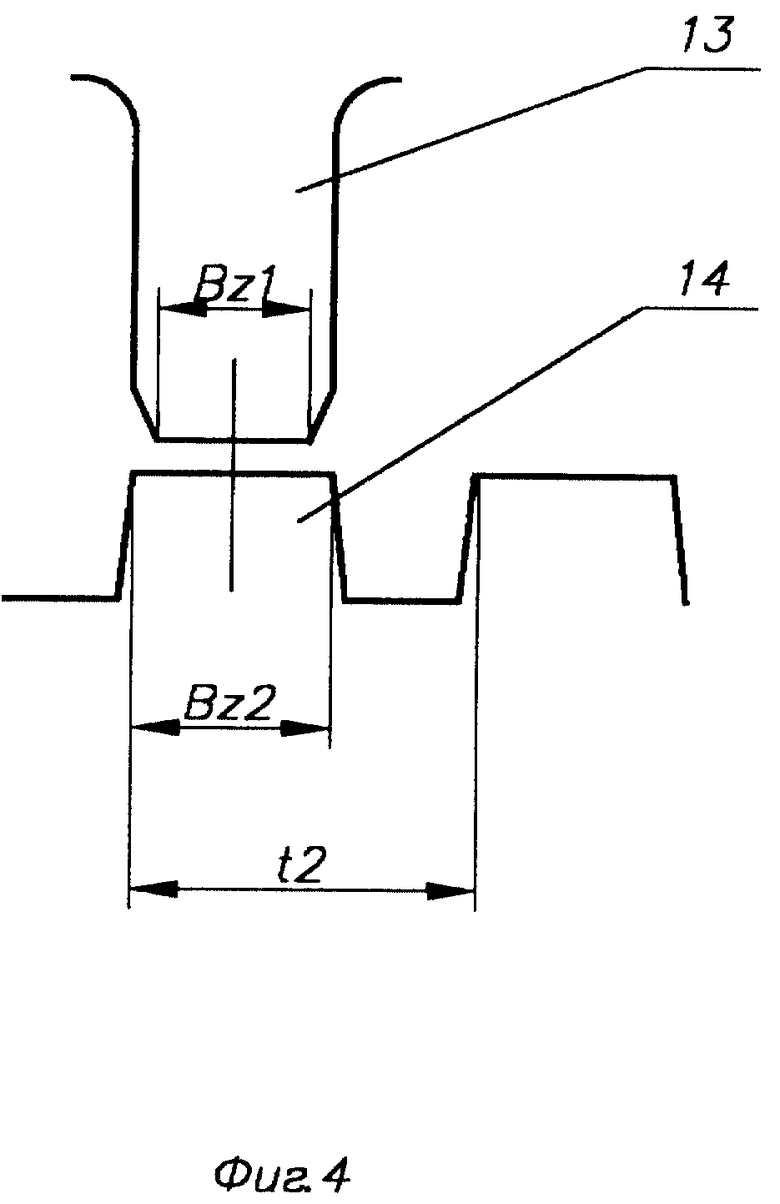
Фиг. 4 - фрагмент зубцовой зоны электродвигателя;
Фиг. 5 - продольный вид ротора со скосом зубцов;
Фиг. 6 - зависимость требуемого компенсирующего момента сервопривода от момента на руле при разных значениях скорости автомобиля;
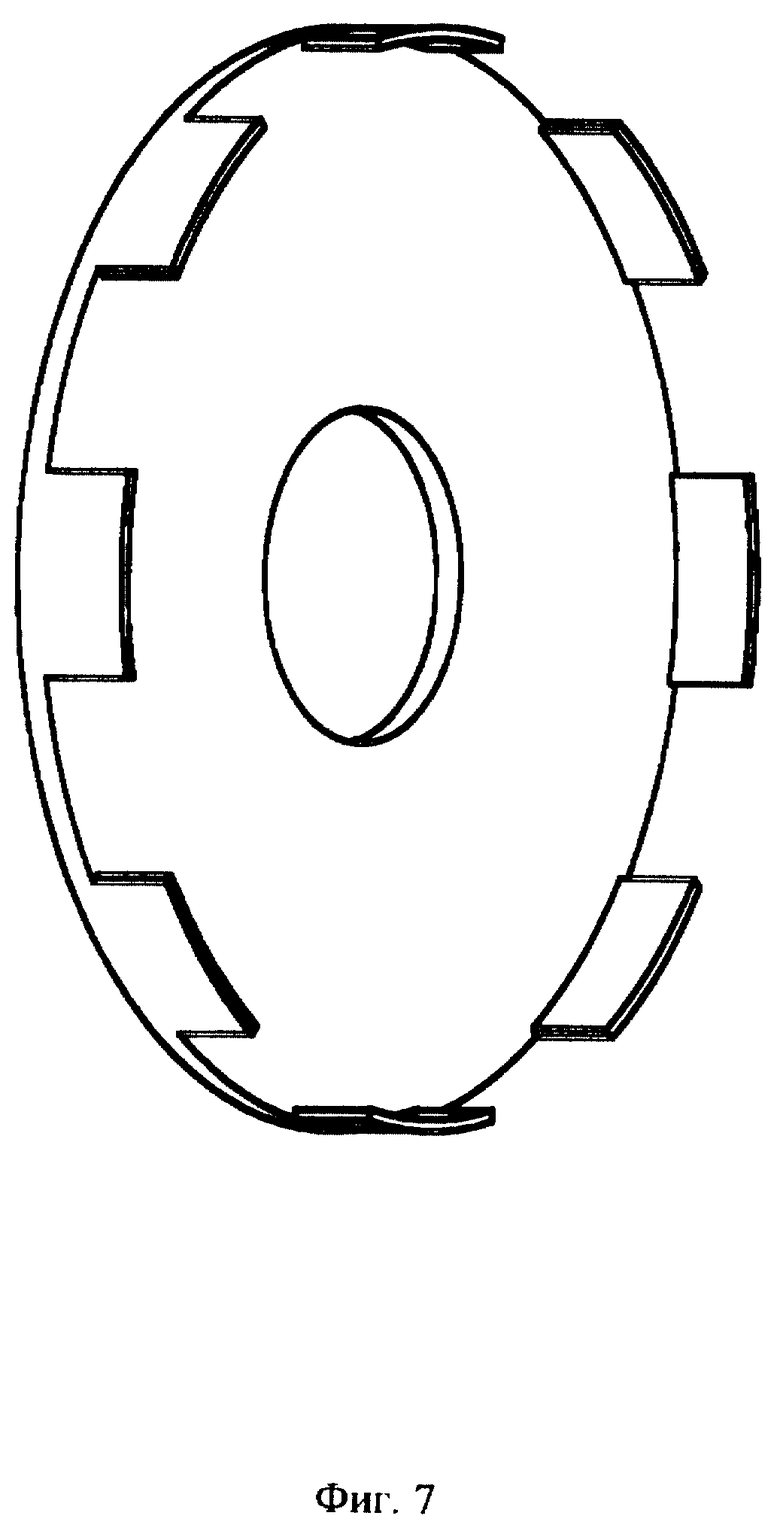
Фиг. 7 - диск датчика положения ротора;
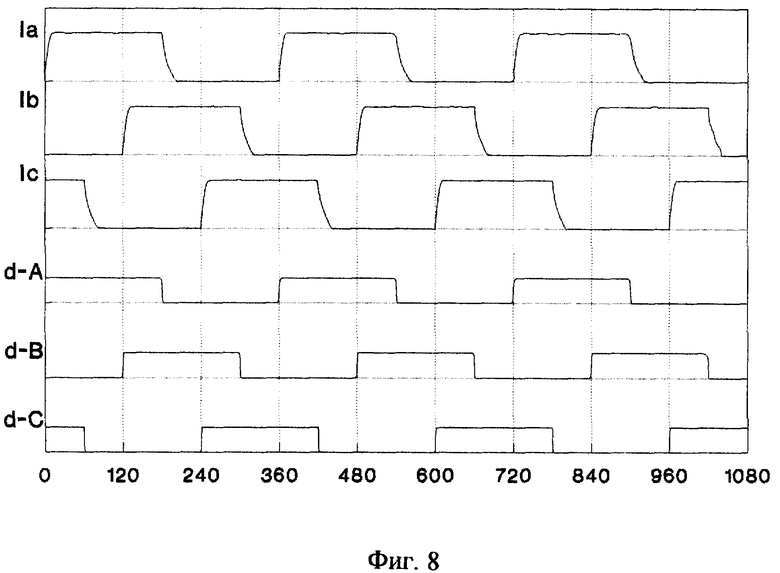
Фиг. 8 - диаграммы фазных токов и сигналов датчика положения ротора;
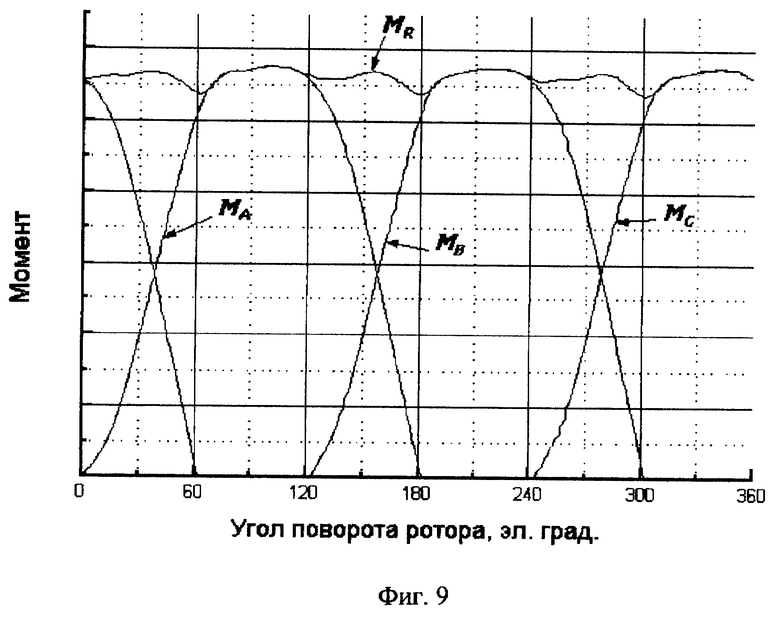
Фиг. 9 - диаграммы результирующего и фазных составляющих момента двигателя.
Электроусилитель руля автомобиля, структурная схема которого показана на фиг. 1, состоит из датчика момента, измеряющего приложенный к рулю момент и формирующего соответствующие выходные сигналы, датчика скорости автомобиля, измеряющего скорость движения автомобиля и формирующего соответствующие выходные сигналы, электродвигателя M, связанного с рулем через червячный редуктор, датчика положения ротора ДПР, регистрирующего положение ротора относительно статора и формирующего соответствующие выходные сигналы, блока управления электродвигателем, формирующего силовые сигналы на обмотках электродвигателя с учетом сигналов датчиков момента, скорости автомобиля, датчика положения ротора.
Компоновка электроусилителя показана на фиг. 2. Датчик момента размещен внутри корпуса электроусилителя и состоит из индуктивной катушки 1, перфорированных электропроводящих цилиндров 2 и 3 и торсионного вала 4. Торсионный вал 4 является упругим элементом и служит для преобразования момента, приложенного к рулю, в угловое перемещение цилиндров 2 и 3 относительно друг друга. Угловое перемещение регистрируется посредством измерения параметров катушки 1. Электродвигатель состоит из зубчатого безобмоточного ротора 5 и зубчатого статора 6 с обмотками 7. Внутри электродвигателя установлен датчик положения ротора, состоящий из перфорированного цилиндра 8 и смещенных на 120 электрических градусов датчиков 9. Вал ротора соединен шлицевым соединением с червяком 10 редуктора. Вращающий момент электродвигателя передается червяком зубчатому колесу 11 редуктора и далее через торсионный вал 4 на рулевую колонку 12.
Электродвигатель (фиг. 3) выполняется трехфазным с числом зубцов на статоре - 13, на роторе - 8. Зубцовая зона (см. фиг. 4) выполнена с разной шириной коронок зубцов статора 13 и зубцов ротора 14, на статоре - bz1 = (0,3.. . 0,36)t2, на роторе - bz2 = (0,39...0,45)t2. На роторе, показанном на фиг. 5, выполнен скос зубцов ротора относительно зубцов статора на величину β = (0,05...0,25)t2.
Основной алгоритм работы электроусилителя подчинен реализации характеристик, показанных на фиг. 6 и связывающих момент на руле Mр с требуемым моментом компенсации Mк, который должен быть обеспечен электроусилителем в зависимости от скорости движения автомобиля. По мере роста момента на руле Mр увеличивается момент компенсации Mк со стороны электроусилителя. В то же время при увеличении скорости движения автомобиля эффективность работы электроусилителя должна быть снижена в соответствии с заданной характеристикой (см. фиг. 6), то есть необходимый момент компенсации снижается. Это связано с тем, что наибольшие усилия к рулю прикладываются водителем при неподвижном автомобиле и во время движения с малой скоростью. На фиг. 6 характеристика G соответствует минимальной скорости движения автомобиля, характеристика A - максимальной скорости, при которой электроусилитель еще создает компенсирующий момент Mк.
При возникновении момента на руле Mр, превышающего заданный минимальный момент Mmin, блок управления электродвигателем вырабатывает силовой управляющий сигнал, приложенный к обмоткам электродвигателя, для создания на рулевой колонке требуемого компенсирующего момента Mк в соответствии с характеристикой, показанной на фиг. 6. При этом величина сигнала на обмотке формируется с учетом сигнала датчика скорости автомобиля (см. фиг. 6), а также сигналов датчика положения ротора и датчика момента на руле Mр. Электроусилитель выполняется реверсивным в соответствии с требуемыми характеристиками (см. фиг. 6). В качестве задающего устройства, формирующего сигналы для управления электродвигателем, в данном случае используется процессор с соответствующим программным обеспечением (см. фиг. 1).
Датчик положения имеет наиболее простое исполнение в виде сдвинутых друг относительно друга на 120 электрических градусов трех датчиков на основе эффекта Холла и показанного на фиг. 7 перфорированного цилиндра с числом перфораций, равным числу зубцов ротора, в данном случае - 8. При вращении ротора датчик положения выдает три сигнала d-A, d-B и d-C, сдвинутые также на 120 электрических градусов или 1/3 периода (см. фиг. 8).
В соответствии с сигналами ДПР блоком управления подается силовой управляющий сигнал на обмотку и по фазным катушкам протекает ток (см. фиг. 8). Причем при работе в области малых частот вращения двигателя ток в фазную катушку подается в положении для данной фазы "зубец-паз", а отключается в положении "зубец-зубец". Таким образом, длительность токового импульса составляет 180 электрических градусов или 1/2 периода, форма импульса - прямоугольная. По мере роста частоты вращения крутизна фронтов фазного тока уменьшается. Для обеспечения при указанной форме импульса тока минимального уровня пульсаций момента на валу электродвигателя и, соответственно, на руле специально сформирована геометрия зубцовой зоны. Ширина коронки зубцов статора - bz1 = (0,3...0,36)t2, ротора - bz2 = (0,39...0,45)t2. Помимо минимального уровня пульсаций выполнение зубцов с разной шириной коронок обеспечивает такую зависимость момента от угла, у которой производная момента по углу в зонах включения ("зубец-паз") и отключения тока ("зубец-зубец") наименьшая по абсолютному значению (см. фиг. 9). Это обеспечивает снижение чувствительности пульсаций момента как к неточности включения и отключения тока в указанных положениях ротора, так и к заваливанию нарастающего и спадающего фронтов тока по мере увеличения частоты вращения. Положительное влияние на снижение пульсаций имеет выполнение взаимного скоса зубцов статора и ротора на величину (0,05...0,25)t2 (см. фиг. 5).
Для снижения акустического шума, вызванного деформациями статора электродвигателя от действия магнитных сжимающих сил, предлагается применить конструкцию статора повышенной жесткости за счет увеличения порядка деформаций: с числом зубцов на статоре - 12, на роторе - 8 (см. фиг. 3).
Таким образом, выполнение электродвигателя в трехфазном варианте с предложенными размерами коронок зубцов статора и ротора, а также применение скоса зубцов позволяет обеспечить низкий уровень пульсаций момента электродвигателя и тем самым высокое качество работы сервопривода в целом. При этом следует отметить, что для обеспечения низкого уровня пульсаций момента в предлагаемом техническом решении достаточно применения датчика положения ротора простейшей конструкции. Кроме того, не требуется использования датчика скорости вращения электродвигателя для построения системы управления, демпфирующей пульсации момента на валу механизма с помощью соответствующей обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| ТРЕХФАЗНЫЙ РЕАКТИВНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2153218C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2001 |
|
RU2181091C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СТАРТОВЫМИ ПОЛЮСАМИ | 1996 |
|
RU2103786C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2040101C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2017 |
|
RU2658636C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ИНДУКТОРНОГО ТИПА | 1993 |
|
RU2079950C1 |




Изобретение относится к электрическим сервоприводам и предназначено для использования при управлении вращающим моментом на валу механизмов с повышенными требованиями к уровню пульсаций момента на малых частотах вращения. Сервопривод содержит датчик момента на валу, электродвигатель, связанный с валом механизма и состоящий из зубчатого статора с обмоткой и зубчатого безобмоточного ротора, датчик положения ротора электродвигателя, блок управления, задающее устройство, формирующее необходимые сигналы для блока управления. Для снижения пульсаций на валу электродвигатель выполнен трехфазным с числом зубцов на статоре 12, а на роторе 8. Его магнитная система выполнена со взаимным скосом зубцов ротора и статора на величину (0,05 - 0,25)t2, при этом ширина коронки зубцов статора по воздушному зазору bz1=(0,3-0,36)t2, а ротора bz2=(0.39-0.45)t2, где t2 - зубцовый шаг по ротору. Устройство характеризуется упрощенной конструкцией за счет применения трехфазного реактивного индукторного электродвигателя со специально сформированной геометрией зубцовой зоны. 2 з.п.ф-лы, 9 ил.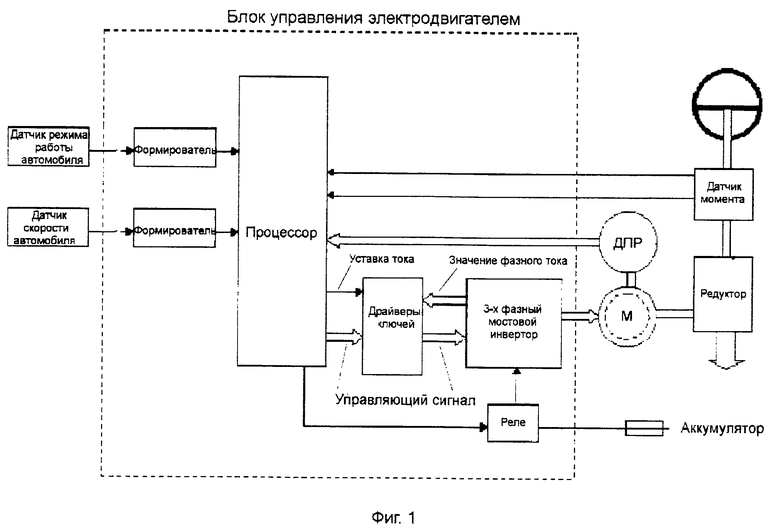
| US 5623409 А, 22.04.1997 | |||
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2009930C1 |
| RU 94019975 А, 10.07.1996. | |||

