Предлагаемое изобретение относится к средствам управления автомобилем и может быть использовано для снижения усилия на руле, в частности, при маневрах на малых скоростях и повороте колес на неподвижном автомобиле.
Известен электромеханический усилитель руля автомобиля, содержащий датчик момента на руле, редуктор, электромагнитную муфту, электродвигатель постоянного тока, управляемый от блока управления по сигналу датчика момента на руле, систему диагностики (патент США 4660671, кл. В 62 D 5/04, 1987).
Недостатком данного технического решения является необходимость применения электромагнитной муфты и редуктора, а также плохое охлаждение двигателя постоянного тока вследствие закрытого исполнения.
Кроме того, известен электроусилитель руля автомобиля (патент РФ 2158692, В 62 D 5/04, БИ 31, 10.11.2000), принятый за прототип, содержащий датчик момента на руле, датчик скорости автомобиля, электродвигатель, механически связанный с рулем и содержащий зубчатый статор с обмоткой и зубчатый безобмоточный ротор, датчик положения ротора электродвигателя, блок управления электродвигателем, электродвигатель выполнен трехфазным с числом зубцов на статоре - 12, на роторе - 8, магнитная система электродвигателя выполнена со взаимным скосом зубцов ротора и статора на величину β =(0,075÷0,15)t2, при этом ширина коронки зубцов статора по воздушному зазору bzl=(0,31÷0,35)t2, а ротора bz2=(0,41÷0,44)t2, где t2 - зубцовый шаг по ротору. Кроме того, блок управления функционально связан с датчиком режима работы автомобиля, регистрирующим режим работы автомобиля и обеспечивающим соответствующий выходной сигнал.
Недостатком прототипа является применение в данном электроусилителе редуктора, установленного между электродвигателем и выходным валом, что усложняет конструкцию и увеличивает массогабаритные показатели, а также снижает безопасность управления автомобилем из-за возможности заклинивания руля при отказе электроусилителя. Кроме того, реактивный индукторный двигатель имеет пульсации электромагнитного момента на валу и обладает худшими массогабаритными показателями.
Задачей предлагаемого изобретения является упрощение конструкции электромеханического усилителя руля а также повышение безопасности управления автомобилем.
Технический результат достигается тем, что в электромеханическом усилителе руля автомобиля, содержащем корпус, расположенные в нем два соосных вала, входной и выходной, электродвигатель, состоящий из магнитопровода статора с трехфазной обмоткой и магнитопровода ротора, датчик момента, выполненный в виде торсиона и измерителя угла скручивания торсиона, датчик положения ротора электродвигателя, блок управления электродвигателем, магнитопровод ротора расположен на выходном валу усилителя руля, а магнитопровод статора встроен в корпус усилителя руля и выполнен с явновыраженными полюсами, на которых расположена обмотка, выполненная в виде катушек, расположенных в шести равных чередующихся фазных зонах по одной катушке на полюс, в каждой фазной зоне размещены несколько включенных последовательно-согласно катушек, принадлежащих одной фазе, ротор электродвигателя выполнен многополюсным с возбуждением от постоянных магнитов, а числа полюсов статора и ротора отличаются на два.
Магнитопровод статора является корпусом электромеханического усилителя руля.
Торсион датчика момента расположен внутри полого выходного вала
Торсион датчика момента расположен внутри полого входного вала.
В дальнейшем изобретение поясняется конкретным примером выполнения со ссылкой на чертежи, на которых показаны:
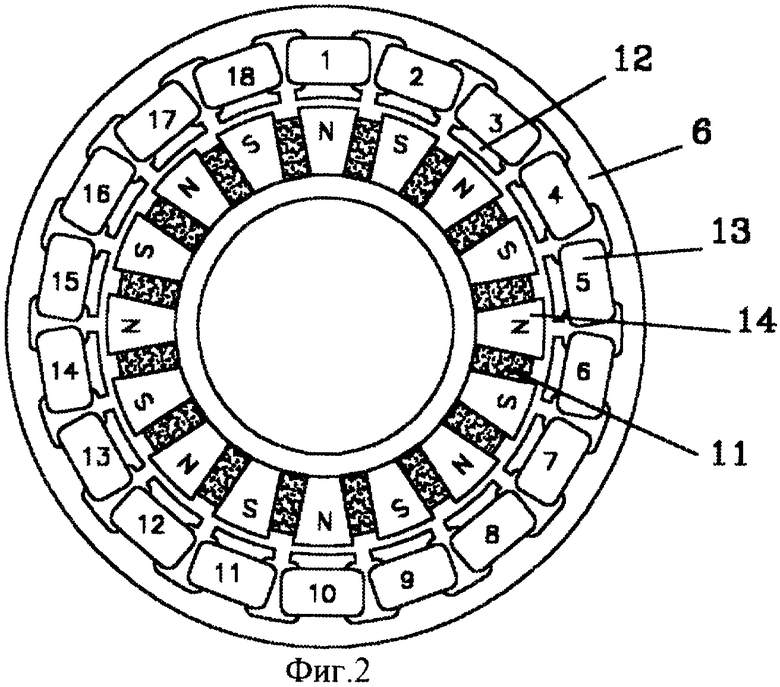
фиг.1 - электромеханический усилитель руля в разрезе;
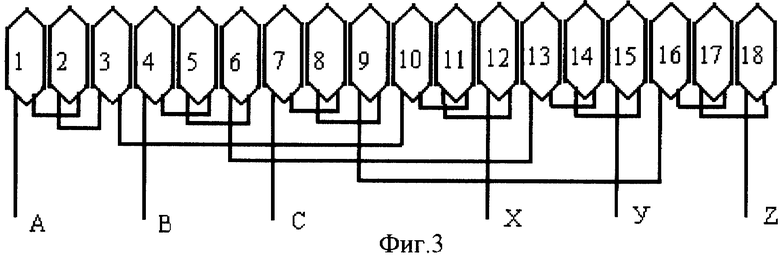
фиг. 2 - поперечное сечение трехфазного многополюсного высокомоментного двигателя с возбуждением от постоянных магнитов;
фиг.3 - схема включения катушек полюсов.
Электромеханический усилитель руля автомобиля (фиг.1) состоит из датчика момента 1, измеряющего приложенный к рулю момент и формирующий соответствующие выходные сигналы, электродвигателя, связанного входным валом 2 с рулем и выходным валом 3 с рулевым механизмом, датчика положения ротора 4, регистрирующего положение магнитопровода ротора 5 относительно статора 6 и формирующего соответствующие выходные сигналы, блока управления электродвигателем. Электродвигатель состоит из магнитопровода статора 6, который одновременно является корпусом усилителя руля, магнитопровода ротора 5, установленного на выходном валу 3 электромеханического усилителя руля, входного вала 2, соединенного с выходным валом 3 через торсион 7, являющимся упругим элементом, работающим на скручивание и служащим для преобразования момента, приложенного к рулю в угловое перемещение подвижных элементов датчика момента (экранов) 8 и 9 относительно друг друга. На подшипниковом щите 10 установлен датчик положения ротора 4, состоящий из 3-х датчиков Холла, смещенных друг относительно друга на 120 эл. градусов и фиксирующих угловое положение ротора по магнитным потокам рассеяния ротора 5, созданных постоянными магнитами 11 (фиг.2).
Электродвигатель выполняется 3-фазным и состоит из статора 6 с явновыраженными полюсами 12, на которых расположены катушки 13 по одной на полюс. Магнитопровод ротора 5 выполнен многополюсным с возбуждением от постоянных магнитов 11. Число полюсов статора 12 отличаются от числа полюсов ротора 14 на два.
Катушки статора (фиг.3) располагаются в шести фазных зонах, в каждой фазной зоне располагаются несколько включенных последовательно-согласно катушек, принадлежащих одной фазе.
Предлагаемый электромеханический усилитель руля работает следующим образом. При возникновении момента на входном валу 2 (фиг.1) торсион 7 скручивается на угол, пропорциональный величине момента. Величина этого угла определяется с помощью подвижных экранов 8 и 9. Этот угол является заданием на систему управления двигателем. При превышении момента на входном валу 2 заданного минимального момента блок управления электродвигателем вырабатывает силовой управляющий сигнал, приложенный к обмоткам электродвигателя 13, для создания на рулевом механизме требуемого компенсирующего момента. При этом величина сигнала на обмотке формируется с учетом сигналов датчика положения ротора 4 и датчика момента l на руле. В блоке управления электродвигателем в соответствии с сигналом задания формируется ток синусоидальной формы, который, протекая по обмоткам статора 13, создает электромагнитный момент, приложенный непосредственно к выходному валу 3 усилителя руля.
Применение зубцовой обмотки с включением катушек в фазной зоне последовательно-согласно, а также выбор определенного соотношения между числами полюсов статора и ротора позволило повысить электромагнитный момент двигателя в два-три раза по сравнению с двигателями классической конструкции. А это, в свою очередь, дало возможность исключить из кинематической схемы усилителя руля механический редуктор, служащий для повышения момента на выходном валу, т.е. упростить конструкцию электромеханического усилителя руля.
Кроме того, выбор определенного соотношения между числами полюсов статора и ротора привело к значительному снижению момента "залипания" от постоянных магнитов и тем самым обеспечить высокое качество работы электромеханического усилителя руля в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ И ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ УСИЛИТЕЛЯ РУЛЯ | 2005 |
|
RU2278797C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2381940C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1998 |
|
RU2152600C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1999 |
|
RU2165076C2 |
| СЕРВОПРИВОД С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2162041C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 2003 |
|
RU2244274C1 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ, ВСТРАИВАЕМЫЙ В РУЛЕВУЮ КОЛОНКУ АВТОМОБИЛЯ | 2002 |
|
RU2216473C2 |
Изобретение относится к автомобилестроению. Электромеханический усилитель руля автомобиля содержит корпус, расположенные в нем два соосных вала, входной 2 и выходной 3, электродвигатель, состоящий из магнитопровода статора 6 с трехфазной обмоткой и магнитопровода ротора 5, датчик момента, выполненный в виде торсиона 7 и измерителя угла скручивания торсиона, датчик положения ротора электродвигателя 4, блок управления электродвигателем. Магнитопровод ротора 5 расположен на выходном валу усилителя руля, магнитопровод статора 6 встроен в корпус усилителя руля и выполнен с явновыраженными полюсами, на которых расположена обмотка, выполненная в виде катушек, расположенных в шести равных чередующихся фазных зонах по одной катушке на полюс, в каждой фазной зоне размещены несколько включенных последовательно-согласно катушек, принадлежащих одной фазе, ротор электродвигателя выполнен многополюсным с возбуждением от постоянных магнитов, а числа полюсов статора и ротора отличаются на два. Магнитопровод статора является корпусом электромеханического усилителя руля, а торсион датчика момента может располагаться либо внутри полого выходного вала, либо внутри полого входного вала. Предложенный электромеханический усилитель руля имеет более простую конструкцию и обеспечивает высокое качество работы в целом. 3 з.п. ф-лы, 3 ил.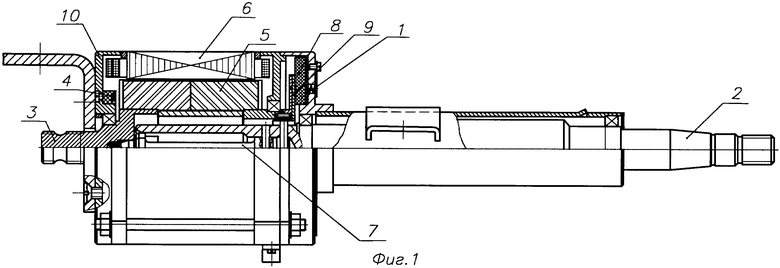
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| ДЕ 3534334 A1, 03.04.1986 | |||
| ФЛОТАЦИОННЫЙ КЛАССИФИКАТОР | 2015 |
|
RU2608120C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |

