Изобретение относится к общему машиностроению и предназначено для применения на сельскохозяйственных колесных тракторах.
Для эксплуатации современных сельскохозяйственных колесных тракторов характерно широкое использование навешиваемых сзади высокопроизводительных машин или орудий, имеющих, как правило, значительную массу. Опрокидывающий момент, создаваемый тяжелой навесной машиной, уменьшает нагрузку на переднюю ось с управляемыми колесами до значений, недопустимых по условиям обеспечения необходимой траектории поворота трактора.
На известных сельскохозяйственных тракторах задача обеспечения нормативной нагрузки на переднюю ось при агрегатировании с навешиваемым сзади машинами решается установкой в передней части трактора балластных грузов, догружающих управляемые колеса. На тракторах МТ3 80А/МТ3 82А (прототип) предусмотрена установка до 18 балластных грузов общей массой 360 кг (Тракторы "Беларусь" МТЗ 100/102, МТЗ 80А/82А". Минск, "Ураджай", 1987 г.).
Недостатком балластирования тракторов является увеличение расхода топлива на перемещение дополнительных масс и перерасход металла.
Целью предлагаемого изобретения является обеспечение нормальной управляемости сельскохозяйственных колесных тракторов с навешенными сзади машинами без использования балластных грузов.
Это достигается тем, что передняя ось выполнена с возможностью ее продольного перемещения относительно остова трактора.
Кроме того, трактор содержит датчик нагруженности передней оси и гидроцилиндр ее перемещения, причем неподвижные элементы гидроцилиндра жестко связаны с остовом трактора, а подвижные элементы жестко связаны с передней осью и выполнены управляемыми от упомянутого датчика нагруженности.
Кроме того, гидроцилиндр перемещения передней оси установлен в плоскости симметрии трактора параллельно опорной поверхности и выполнен двухполостным двухштоковым, причем с остовом трактора жестко связаны штоки гидроцилиндра, а с передней осью жестко связан его корпус.
Кроме того, выходной элемент датчика нагруженности передней оси выполнен в виде двух контактов, причем при нагрузке на переднюю ось, превышающей минимально необходимое для нормальной управляемости трактора (нормативное) значение, первый, нормально замкнутый, контакт разомкнут, а второй, нормально разомкнутый, контакт замкнут, а при нагрузке на переднюю ось меньшей, чем нормативное значение, первый из упомянутых контактов замкнут, а второй разомкнут.
Кроме того, гидроцилиндр перемещения передней оси сообщен через управляемый от датчика ее нагруженности четырехлинейный трехпозиционный электроуправляемый распределитель с напорной и сливной гидролиниями, причем электромагнит включения движения передней оси назад установлен в цепи управления последовательно с нормально замкнутым контактом упомянутого датчика, а электромагнит включения движения передней оси вперед установлен в цепи управления последовательно с нормально разомкнутым контактом упомянутого датчика.
Кроме того, управляемые колеса снабжены приводными гидромоторами с параллельно установленными двухлинейными двухпозиционными нормально закрытыми распределителями, управляемыми от датчика нагруженности передней оси.
Кроме того, трактор снабжен датчиком поворота управляемых колес, выходной элемент которого выполнен в виде контакта, замкнутого в режиме прямолинейного движения трактора и разомкнутого в режиме его поворота, причем контакт установлен в цепи управления последовательно с электромагнитами распределителя перемещения передней оси.
На фиг. 1, 2 изображена конструктивная схема трактора, вид сбоку и вид сверху, на фиг. 3 а, б, в - принципиальные гидравлическая и электрическая схемы управления.
Предлагаемый трактор содержит двигатель 1, ведущие колеса 2, приводимые от двигателя через механизмы передачи мощности 3, навесную систему с механизмом навески агрегатируемых машин и орудий 4. Вышеуказанные элементы связаны с остовом трактора 5. Передняя ось 6 трактора с управляемыми колесами 7 жестко связана с корпусом 8 гидроцилиндра 9, а шток 10 гидроцилиндра 9 жестко связан с остовом 5. В штоках 10 выполнены каналы 11 для подвода рабочей жидкости (масла). В колеса 7 встроены гидромоторы 12 для привода колес 7 и, соответственно, придания оси 6 функций переднего ведущего моста. Гидроцилиндр 9 установлен в плоскости симметрии трактора параллельно опорной поверхности. В корпусе 8 установлен датчик 13 нагруженности передней оси 6. На передней оси 6 установлены гидроцилиндры 14 управления поворотом управляемых колес 7 и датчик 15, контролирующий поворот колес 7 в шарнирах 17. Для контроля крайних переднего и заднего положений передней оси 6 установлены датчики 18 и 19. Управление гидроцилиндром 9 перемещения передней оси 6 осуществляется (фиг. 2) четырехлинейным трехходовым электроуправляемым распределителем 20 с электромагнитами 21, 22 и с напорной 23 и сливной 24 гидролиниями. Управление приводом гидромоторов 12 управляемых колес 7 осуществляется блоком гидроаппаратуры 25 с напорной 26 и сливной 27 гидролиниями, а параллельно гидромоторам 12 установлены двухлинейные двухпозиционные электроуправляемые распределители 28 с электромагнитами 29. В цепи управления электромагнит 22 включения движения передней оси назад установлен последовательно с нормально замкнутым контактом 30 датчика нагруженности передней оси 13 и с нормально замкнутым контактом 31 датчика крайнего заднего положения передней оси 19, а электромагнит 21 включения движения передней оси вперед установлен последовательно с нормально разомкнутым контактом 32 датчика нагруженности передней оси 13 и с нормально замкнутым контактом 33 датчика крайнего переднего положения переденей оси 18. Кроме того, электромагниты 21 и 22 включены последовательно с контактами 34 датчика поворота управляемых колес 15, замкнутым в режиме прямолинейного движения трактора и разомкнутым в режиме его поворота. Параллельно с электромагнитами 21 и 22 распределителя 20 в цепь управления включены электромагниты 29 распределителя 28, причем их питание осуществляется от цепи управления электромагнитами 21 и 22 через диоды 35, 36. В схему электроуправления включены сопротивления 37, 38, 39, 40 и конденсатор 41, обеспечивающие фильтрацию случайных сигналов датчика нагруженности передней оси 13.
Трактор работает следующим образом.
В исходном положении передняя ось 6 трактора с управляемыми колесами 7 находится в крайнем переднем положении, соответствующем максимальной колесной базе Lmax. Управляемые колеса 7 находятся в положении параллельном неуправляемым колесам 2, что соответствует прямолинейному движению трактора.
Датчик 15 контроля поворота колес и датчик 18 крайнего переднего положения передней оси 6 нажаты, соответственно замкнут контакт 34 датчика 15 и разомкнут контакт 33 датчика 18. Датчик 19 крайнего заднего положения передней оси не нажат, и, соответственно, замкнут его контакт 31. При отсутствии или относительно небольшой величине нагрузки G на механизме навески 4 отсутствует или незначителен опрокидывающий момент, воздействующий на трактор. Соответственно не "разгружены" управляемые колеса 7 и передняя ось 6, поэтому усилие на датчике нагруженности 13 велико и нормально разомкнутый контакт 32 датчика 13 замкнут, а нормально замкнутый контакт 30 датчика 13 разомкнут. В результате разомкнуты как цепь управления, образования контактами 34, 32. 33, так и цепь управления, образованная контактами 34, 30, 31. Соответственно "Обесточены" электромагниты 21 и 22 распределителя 20 и электромагниты 20 распределителя 28. Поэтому распределитель 20 находится в позиции "нейтраль" (средняя), запирая гидроцилиндр 9, а распределители 28 находятся в позиции "заперто" (верхней), рассоединяя входные и выходные гидролинии гидромоторов 12 привода управляемых колес.
При включении двигателя 1 через механизмы передачи мощности 3 (коробка передач с первичным и вторичным валами и муфта сцепления на схеме фиг. 1 не показаны) осуществляется привод задних колес 2 и, соответственно, происходит прямолинейное движение трактора при максимальной колесной базе.
Если масса навешенной на трактор агрегатируемой машины относительно велика и создает опрокидывающий момент, вызывающий "разгрузку" передней оси и управляемых колес до значений, не обеспечивающих нормальной управляемости трактора, то соответственно уменьшается нагрузка на датчик нагруженности 13 и происходит последовательное размыкание его контакта 32 и замыкание его контакта 30. Появляется ток в электромагните 22 распределителя 20 и в электромагнитах 29 (через диод 36). Распределитель 20 занимает правую позицию, соединяя через каналы 11 в жестко связанных с остовом 5 трактора штоках гидроцилиндра 9 его правую полость с напорной гидролинией 23 и его левую полость со сливной гидролинией 24. Распределители 28, занимая нижнюю позицию, сообщают входные и выходные гидролинии гидромоторов 12 друг с другом и, соответственно, обеспечивают их "плавающую" позицию. Жестко связанный с передней осью 6 корпус 8 гидроцилиндра 9 под действием давления жидкости в правой полости гидроцилиндра вместе с передней осью 6 и управляемыми колесами 7 начинает смещаться, приближаясь к задним колесам 2. Одновременно "освобождается" датчик 18 контроля крайнего переднего положения передней оси и замыкает его контакт 33. "Плавающая" позиция гидромоторов 12 привода передних управляемых колес 7 в момент перемещения передней оси снижает требуемое усилие гидроцилиндра 9 независимо от схемы подключения к гидромоторам 12 напорной и сливной гидролинией 26 и 27, установленной в это время гидроаппаратурой 25 (в частности в случае работы гидромоторов 12 в режиме переднего ведущего моста).
При приближении передней оси 6 с управляемыми колесами 7 к задним колесам 2 происходит перераспределение нагрузки на колеса, вызываемой массой машинно-тракторного агрегата: уменьшается нагрузка на задние колеса 2 и увеличивается нагрузка на передние колеса 7. При достижении нагрузки на передних колесах 7 (и соответственно, на передней оси 6) нормативного значения, обеспечивающего нормальную управляемость трактора, происходит размыкание контакта 30 датчика нагруженности 13 и перемещение его контакта 32 в промежуточную (нейтральную) позицию "П". В результате "обесточиваются" электромагниты 21, 22, 29. Распределитель 20 занимает позицию "нейтраль", запирая гидроцилиндр 9 и фиксируя переднюю ось 6 в положении, соответствующем режиму нормальной управляемости трактора. Распределители 28 занимают позицию "заперто" (верхнюю), исключая "плавающее" положение гидромоторов 12 и делая возможной работу передних колес в тяговом режиме. Причем в связи с "догрузкой" передней оси обеспечивается повышение тяговых возможностей трактора при его работе в режиме переднего ведущего моста.
Если опрокидывающий момент, создаваемый массой G навешенной на трактор машины недопустимо велик (что вероятно при нарушении правил эксплуатации), перераспределение нагрузок по осям при уменьшении колесной базы не приводит к достижению нормативной нагрузки на переднюю ось. Размыкания контакта 30 датчика 13 не происходит, поэтому электромагнит 22 распределителя 20 остается включенным, распределитель 20 находится в правой позиции и гидроцилиндр 9 продолжает перемещать переднюю ось 6 назад (по направлению к задним колесам) до крайнего заднего положения. В результате нажимается датчик (конечный выключатель) 19, размыкается его нормально замкнутый контакт 39, "обесточивается" электромагнит 22 распределителя 20. Распределитель 20 переключается в позицию "нейтраль" и одновременно возникает сигнал о недопустимости нагрузки, создаваемой навешенной на трактор машиной (элементы формирования аварийного сигнала - лампа, звонок и т.п. на схеме фиг. 2 не показаны).
Если в крайнем заднем положении передней оси 6 на механизме навески 4 отсутствует агрегатируемая машина или опрокидывающий момент, создаваемый ее массой G относительно невелик, нагрузка на переднюю ось будет соответствовать допустимым по условиям управляемости трактора значениям при любом расположении передней оси (зона Lmax-Lmin). Под действием нагрузки на переднюю ось 6 нормально разомкнутый контакт 32 датчика нагруженности 13 замыкается, его нормально замкнутый контакт 30 размыкается. Включаются электромагнит 21 распределителя 20 и через диод 35 электромагниты 29 распределителей 28. Распределитель 20 переключается в левую позицию (движение передней оси вперед), а распределитель 28 переключается в нижнюю позицию (обеспечивая "плавающее" положение гидромоторов 12). В результате начинается движение передней оси 6 вперед, продолжающееся до ее прихода в крайнее переднее положение. Нажимается датчик (конечный выключатель) 18, размыкается его нормально замкнутый контакт 33. "обесточивается" электромагнит 21 распределителя 20 и электромагнит 29 распределителей 28. Распределитель 20 занимает позицию "нейтраль", "запирая" гидроцилиндр 9 и фиксируя положение передней оси 6. Распределитель 22 занимает верхнюю позицию (заперто), разъединяя входные и выходные гидролинии гидромоторов 12. В результате обеспечивается возможность движения трактора при максимальной колесной базе и, при необходимости, в режиме переднего ведущего моста.
Так как во время поворота нежелательно по условиям безопасности тракториста перемещение передней оси (из-за сложности в этом случае контроля траектории) в рассматриваемом тракторе предусмотрена соответствующая блокировка. При повороте управляемых колес 7, осуществляемом гидроцилиндрами 14, в шарнире 17 поворачивается копир 16, прекращающий нажатие датчика (путевого выключателя) 15 и размыкается его нормально разомкнутый контакт 34. В результате разрывается цепь питания электромагнитов 21 и 22 распределителя 20, который занимает позицию "нейтраль", "запирая" гидроцилиндр 9 и делая невозможным перемещение передней оси 6. При завершении поворота трактора управляемые колеса 7 вновь занимают положение, соответствующее прямолинейному движению (параллельно задним колесам 2), датчик 15 вновь оказывается нажатым копиром 16 и в связи с замыканием контакта 34 вновь создается возможность автоматического регулирования положения передней оси 6.
Наличие в системе управления конденсатора 41 в сочетании с сопротивлениями 37, 38, 39, 40 реализует один из возможных вариантов исключения воздействия случайных динамических сигналов датчика нагрузки 13, возникающих при движении трактора по неровной поверхности; кратковременные токи не вызывают срабатывания электромагнитов 21, 22, 29, поглощаясь конденсатором 41.
Силоизмерительные элементы датчика нагруженности 13 выполняются известными способами (пружинный, тензометрический и др.), исходя из конкретных условий применения.
Установка гидроцилиндра 9 в плоскости симметрии трактора параллельно опорной поверхности позволяет одновременно использовать его как шарнир, допускающий при наезде одного из управляемых колес 7 на неровности почвы поворот передней оси 6 в вертикальной плоскости за счет поворота корпуса 8 относительно штоков 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСИСТЕМА ПРОМЫШЛЕННОГО ТРАКТОРА | 1995 |
|
RU2084357C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАКТОРА | 1999 |
|
RU2162629C2 |
| ТРАНСМИССИЯ ВНЕДОРОЖНЫХ МАШИН, ПРЕИМУЩЕСТВЕННО ТРАКТОРОВ | 1999 |
|
RU2162799C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЯГОВЫМИ РЕЖИМАМИ ПЕРЕДНЕГО И ЗАДНЕГО МОСТОВ КОЛЕСНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1993 |
|
RU2038986C1 |
| ГИДРОПРИВОД ТРАНСПОРТНОЙ МАШИНЫ-САМОСВАЛА | 1994 |
|
RU2079734C1 |
| ГИДРОСИСТЕМА УБОРОЧНОГО КОМБАЙНА | 1991 |
|
RU2015646C1 |
| ГИДРОПРИВОД | 1991 |
|
RU2028522C1 |
| КОЛЕСНЫЙ ТРАКТОР | 1991 |
|
RU2034718C1 |
| ТРЕЛЕВОЧНЫЙ ТРАКТОР | 1994 |
|
RU2083392C1 |
| ГИДРОСИСТЕМА СЕЛЬСКОХОЗЯЙСТВЕННОГО УБОРОЧНОГО КОМБАЙНА | 1991 |
|
RU2015645C1 |


Изобретение может быть использовано в сельскохозяйственном машиностроении и предназначено для применения на сельскохозяйственных колесных тракторах. Изобретение заключается в том, что передняя ось трактора выполнена с возможностью ее перемещения относительно остова. Перемещение передней оси осуществляется гидроцилиндром, управляемым от датчика нагруженности с помощью электрогидравлического распределителя. Гидроцилиндр перемещения передней оси установлен в плоскости симметрии трактора параллельно опорной поверхности. Трактор снабжен датчиком положения управляемых колес, блокирующим возможность перемещения передней оси во время поворота. Кроме того, параллельно гидромоторам привода управляемых колес установлены двухлинейные двухпозиционные нормально закрытые распределители, управляемые от датчика нагруженности передней оси. Изобретение позволит обеспечить нормальную управляемость колесного трактора с навешенными сзади сельскохозяйственными машинами без использования балластных грузов. 6 з.п.ф-лы, 3 ил.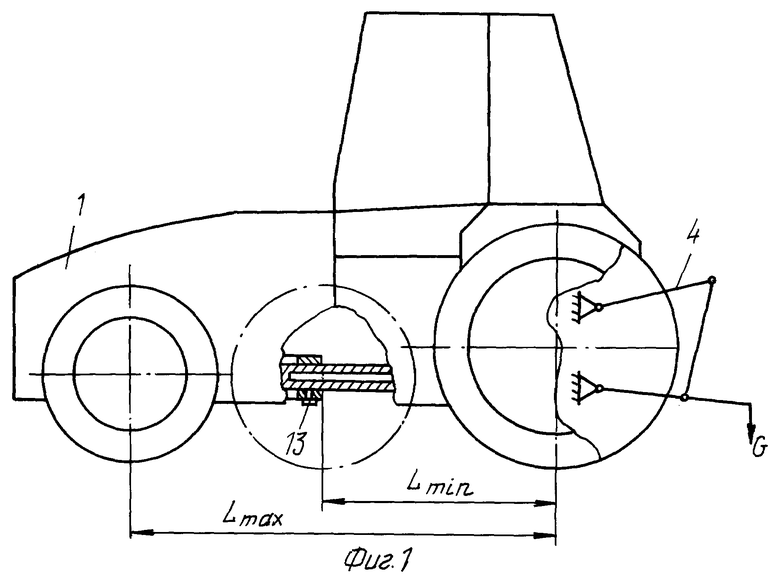
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Техническое описание и инструкция по эксплуатации | |||
| - Минск: Урожай, 1987, с.17 | |||
| Навесной тракторный агрегат | 1974 |
|
SU511891A1 |
| Сельскохозяйственный трактор | 1962 |
|
SU528051A1 |
