Изобретение относится к области офтальмологии и может быть использовано при операции по коррекции зрения с применением эксимерного лазера.
Известен способ подачи луча эксимерного лазера на роговицу глаза (см. патент США N5108388, кл. НКИ 606/005, 1992 г.), при котором излучение направляют через маску, что позволяет образовать абляцию определенной формы и глубины. Но данная система не учитывает отклонения глаза пациента во время операции по коррекции зрения от фокальной плоскости, а это приводит к изменению площади пятна на 5-10% и, как следствие, к изменению энергии лазерного излучения, падающего на единицу поверхности.
Известен способ позиционирования точки луча эксимерного лазера, описанного в патенте США N5645550, кл. НКИ 606/108, 1997 г., выбранного в качестве прототипа. В известном способе за оптическую ось глаза принимают центр зрачка. Система содержит инфракрасную подсветку, инфракрасную видеокамеру, которая производит съемку глаза, где в качестве объекта съемки выступает зрачок. Через процессор-преобразователь инфракрасного изображения в видимое на мониторе компьютер по разнице контрастности радужной оболочки и зрачка определяет центр зрачка. Координаты центра зрачка постоянно сообщаются системе сканирования лазерным лучом, которая вносит необходимую поправку для производства следующего импульса лазера.
Недостаток известного способа малая вероятность совпадения центра зрачка с оптической осью глаза и невозможность учесть перемещение глаза вверх и вниз от фокуса луча эксимерного лазера.
В известном способе видеокамера регистрирует границы зрачка, принимая его как круг правильной геометрической формы, но такая условность не может применяться для зрачка. Зрачок это пустота, ограниченная мышцами радужки. Мышцы радужки состоят из сфинктера, инервируемого парасимпатической нервной системой.
При сокращении сфинктера зрачок сужается. Некоторым заболеваниям глаз (перенесенная глаукома, парез мышц, деиннервация и т.д.) сопутствует неравномерное сокращение мышц, что приводит к нарушению идеальной геометрии зрачка. Указанная патология состояния мышц встречается у 15% пациентов, которым показана фоторефрактивная кератотомия. Учитывая, что в ходе операции зрачок меняет свои размеры и форму, его границы могут принимать форму эллипса или другую несимметричную форму, то вычисленный от ее координат центр зрачка не обязательно будет совпадать с оптической осью глаза. А это снижает точность позиционирования. Кроме того, в известном способе применение одной видеокамеры позволяет анализировать движение глаза только в двух измерениях и не может учитывать перемещения глаза вверх и вниз от фокуса луча эксимерного лазера. В процессе операции такие перемещения составляют +1 мм, а это изменяет плотность энергии в лазерном пятне на 5-10%. Такую же величину составляет в этом случае ошибка коррекции кривизны роговицы.
Задачей создания изобретения были выбор новых реперных точек на глазе, координаты которых не изменяли бы свое положение во время операции, т.е. оставались неподвижными относительно оптической оси глаза. Кроме того, по данным координатам этих точек необходимо добиться возможности управлять системой сканирования эксимерного лазера в трехмерном пространстве.
Поставленная задача решается тем, что в способе позиционирования точки луча эксимерного лазера при операции на глазе путем определения оптической оси глаза с помощью выбранных реперных точек, координаты которых через компьютер сообщают системе сканирования с необходимыми поправками для производства следующего импульса, выбранные реперные точки координат наносят в виде меток на роговицу глаза вне зоны оперативного вмешательства, а координаты этих точек определяются в пространстве с помощью двух видеокамер и передаются в компьютер, который управляет системой сканирования в трехмерном пространстве, обеспечивая фокус луча эксимерного лазера в нужной точке по совмещенным проекциям двух диафрагм, через которые проходят лучи диодных лазеров.
Решение этой задачи позволяет повысить точность позиционирования точки луча эксимерного лазера до 50 мкм за счет нанесения на роговицу глаза неподвижных относительно оптической оси глаза меток. А поскольку координаты этих меток регистрируются не только в плоскости, но и в пространстве, то система слежения позволит вносить корректировку при смещениях глаза вдоль оси луча эксимерного лазера, т.е. при уходе поверхности роговицы из фокуса луча.
Отличительной особенностью заявленного способа от прототипа является новый выбор реперных точек, по координатам которых определяют оптическую ось глаза. За эти точки принимаются метки, которые наносятся на роговицу глаза вне зоны операционного поля. В прототипе точками координат является граница круга - зрачка. Кроме того, отличительной особенностью заявленного способа от прототипа является то, что метки на роговице с помощью двух видеокамер позволяют вычислить их координаты в трехмерном пространстве, а система сканирования может управлять лучом лазера как в фокальной плоскости, так и вдоль оптической оси глаза. При этом фокус луча эксимерного лазера в нужной точке глаза обеспечивается по совмещенным проекциям двух диафрагм, через которые проходят лучи диодных лазеров. В прототипе система слежения имеет только одну видеокамеру, поэтому позволяет учитывать перемещения глаза только поперек оси лазерного луча. При этом остаются неучтенными перемещения глаза вверх и вниз от фокуса луча эксимерного лазера.
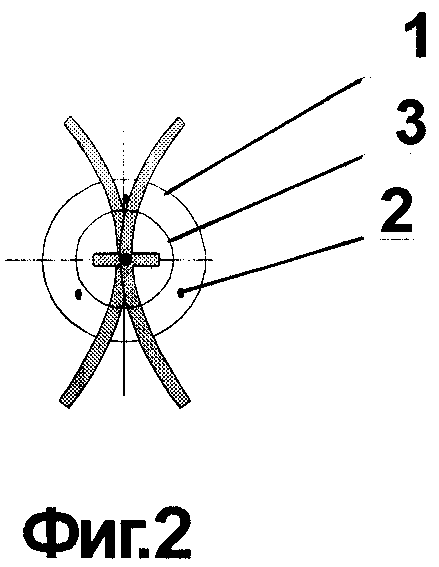
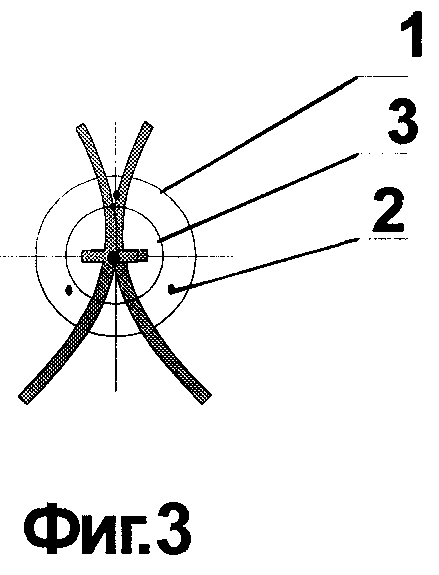
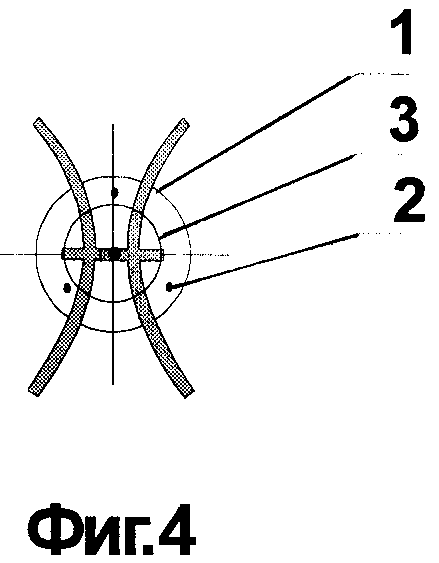
Сущность изобретения поясняется чертежом, где на фиг.1 показана схема формирующей системы эксимерной лазерной установки, на фиг.2 - проекция диафрагм на роговице глаза при правильном наведении фокуса луча эксимерного лазера, на фиг.3 - то же, при неправильном выборе угла плоскости роговицы, на фиг.4 - то же, при неправильном наведении фокуса.
Способ позиционирования точки луча эксимерного лазера при операции на глазе осуществляется следующим образом. Пациент укладывается на подвижный операционный стол (на чертеже не показан). На роговицу глаза 1 метчиком наносят три метки 2 вне зоны 3 операционного вмешательства. Для меток 2 используется флюоресцентный краситель, видимый в инфракрасном излучении. Включается нацеливающий диодный лазер 4, луч 5 которого совпадает с оптической осью эксимерного лазера 6. На глазе 1 пациента точечное пятно нацеливающего лазера 4 показывает место прохождения луча 7 эксимерного лазера 6. С помощью видеокамер 8 на монитор компьютера (на чертеже не показан) передаются пространственные координаты меток 2, по которым определяется оптическая ось глаза 1, а сканирующая система 9 совмещает луч 5 с оптической осью глаза 1. Одновременно включаются расположенные под углом к оптической оси глаза два диодных лазера 10, лучи 11 которых, проходя через крестообразные диафрагмы 12, будут видимы в виде проекций крестов на роговице глаза 1. Хирург, наблюдая в микроскоп 13 роговицу пациента (см. ориг. 2, 3, 4,), устанавливает глаз 1 пациента таким образом, чтобы проекции крестов от диафрагм 12 совместились, а ярко красное пятно от луча 5 нацеливающего лазера 4 находилось в центре креста. Эту реперную точку, являющуюся фокусом луча 7 эксимерного лазера 6, хирург фиксирует нажатием кнопки для системы 9 сканирования и включает эксимерный лазер 6. Начинается эмиссия и испарение ткани роговицы в зоне 3 оперативного пространства глаза 1. Время процедуры, диаметр зоны 3, а также толщина испаряемой роговицы в районе оптической оси выбирается индивидуально по плану операции. В процессе процедуры осуществляется компьютерный протокол поправок координат системы слежения за реперной точкой. По анализу поправок координат, сообщаемых через компьютер системе 9 сканирования, корректируется отклонение оптической оси глаза 1 от реперной точки и отклонение плоскости роговицы от фокальной плоскости.
Пример выполнения способа:
Пациенту с миопией - 6D, возраст 42 года, производилась коррекция зрения. По желанию пациента в результате операции по коррекции зрения остаточная миопия должна составить - 1D. Перед проведением операции установлено: толщина роговицы 510 мкм, планируемая зона оперативного вмешательства диаметром 7,5 мм, а программируемая толщина испаренной роговицы в районе оптической оси глаза - 85 мкм. Пациент укладывается на подвижном столе. На роговице глаза 1 по диаметру 10 мм наносятся три метки 2 флюоресцентным красителем, видимым в инфракрасном излучении. Глаз 1 пациента устанавливается по оси луча 7 эксимерного лазера 6 для чего используется нацеливающий диодный лазер 4, точечное пятно от которого показывает место прохождения луча 7 эксимерного лазера 6. С помощью видеокамер 8 на монитор компьютера передаются пространственные координаты меток 2, по которым с помощью программного обеспечения определяется оптическая ось глаза 1. Сканирующая система 9 совмещает луч 5 с оптической осью глаза 1. Включают два диодных лазера 10, лучи 11 которых, проходя через крестообразные диафрагмы 12, оставляют проекции крестов на роговице глаза 1. Под наблюдением через микроскоп 13 осуществляется перемещение глаза 1 вдоль его оптической оси, добиваясь совмещения проекций крестов в одну проекцию и чтобы красное пятно луча 5 от нацеливающего лазера 4 находилось в центре креста. Полученная точка является реперной точкой для системы 9 сканирования, после фиксации которой включается эксимерный лазер 6. Начинается эмиссия и испарение ткани роговицы в зоне 3 операции. Весь процесс проходит автоматически под наблюдением компьютерной системы слежения, которая управляет системой 9 сканирования. В данном примере время процедуры составляло 120 с, а зона 3 операции равнялась диаметру - 7,5 мм. В процессе процедуры осуществлялся компьютерный протокол поправок координат системы слежения за реперной точкой. По анализу поправок координат, сообщаемых системой слежения сканирующему устройству, обнаружено четыре отклонения оптической оси глаза 1 вверх (закатывание) на 43, 55, 83 и 90 секундах операции. Длительность каждого отклонения 0,8-1,5 с. Среднее отклонение оптической оси от реперной точки составляло 1,5 мм. Кроме того, по тем же компьютерным протоколам зафиксировано отклонение плоскости роговицы от фокальной плоскости вниз (вдавливание головы) на 20-ой секунде на 1 мм. При выполнении предложенного способа хирург визуально не наблюдал зафиксированных по протоколу перемещений глаза пациента, т.к. система слежения успевает скорректировать координаты и передать сканирующему устройству и механизму перемещения фокальной плоскости поправки к координатам последующих импульсов. Результаты операции по данному пациенту спустя месяц после вмешательства оказались следующими: миопия - 0,75D, толщина роговицы в зоне оптической оси 420 мкм.
Способ апробирован в межрегиональной клинике центра лазерной коррекции города Ярославля.
Полезные свойства заявленного способа очевидны при сравнительном анализе. Например, при отсутствии системы слежения и коррекции координат перемещений глаза пациента во время операции, зафиксированные компьютерным протоколом в примере, привели бы к ошибке в коррекции до - 2D, т.е. пациент имел бы после операции - 3D. Кроме того, во время операции за счет того, что луч лазера имеет пятно 1-2 мм, нескомпенсированные отклонения глаза могут привести к появлению "островков" на поверхности роговицы. Конфигурация "островков" будет соответствовать форме колебаний глаза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Офтальмохирургическая рефракционная твердотельная лазерная система | 2018 |
|
RU2749346C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОФИЛЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2000 |
|
RU2183107C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ГЛАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2257136C2 |
| СПОСОБ И УСТАНОВКА ЛАЗЕРНОЙ КОРРЕКЦИИ РОГОВИЦЫ ГЛАЗА | 2002 |
|
RU2230538C1 |
| УСТРОЙСТВО, СПОСОБ И ПРОГРАММА УПРАВЛЕНИЯ ДЛЯ ПРОВЕДЕНИЯ ОФТАЛЬМОЛОГИЧЕСКОЙ, В ЧАСТНОСТИ РЕФРАКЦИОННОЙ, ЛАЗЕРНОЙ ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2008 |
|
RU2481810C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ОФТАЛЬМОЛОГИЧЕСКОЙ, В ЧАСТНОСТИ РЕФРАКЦИОННОЙ, ЛАЗЕРНОЙ ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2008 |
|
RU2480190C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ОФТАЛЬМОЛОГИЧЕСКОЙ, В ЧАСТНОСТИ РЕФРАКЦИОННОЙ, ЛАЗЕРНОЙ ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2008 |
|
RU2474405C2 |
| ОФТАЛЬМОХИРУРГИЧЕСКАЯ ЛАЗЕРНАЯ СИСТЕМА НА ОСНОВЕ ФЕМТОСЕКУНДНОГО ЛАЗЕРА | 2010 |
|
RU2423959C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ ОФТАЛЬМОЛОГИЧЕСКОГО ХИРУРГИЧЕСКОГО ЛАЗЕРА | 2010 |
|
RU2540909C2 |
| Способ протонной лучевой терапии внутриглазных злокачественных новообразований | 2015 |
|
RU2680208C2 |
Способ относится к офтальмологии и может быть использован при операции по коррекции зрения с применением эксимерного лазера. Способ позиционирования точки луча эксимерного лазера при операции на глазе осуществляется определением оптической оси глаза с помощью выбранных реперных точек, координаты которых через компьютер сообщают системе сканирования с необходимыми поправками для производства следующего импульса лазера. Для определения оптической оси глаза новые реперные точки предлагается наносить на роговицу глаза в виде меток, видимых в инфракрасном и ультрафиолетовом спектрах излучения, по периметру за зоной оперативного вмешательства, а координаты этих точек в пространстве с помощью двух видеокамер передавать в компьютер. Компьютер управляет системой сканирования в трехмерном пространстве, обеспечения фокус луча эксимерного лазера в нужной точке по совмещенным проекциям двух диафрагм, через которые проходят лучи диодных лазеров. Техническим результатом является повышение точности позиционирования точки луча. 4 ил.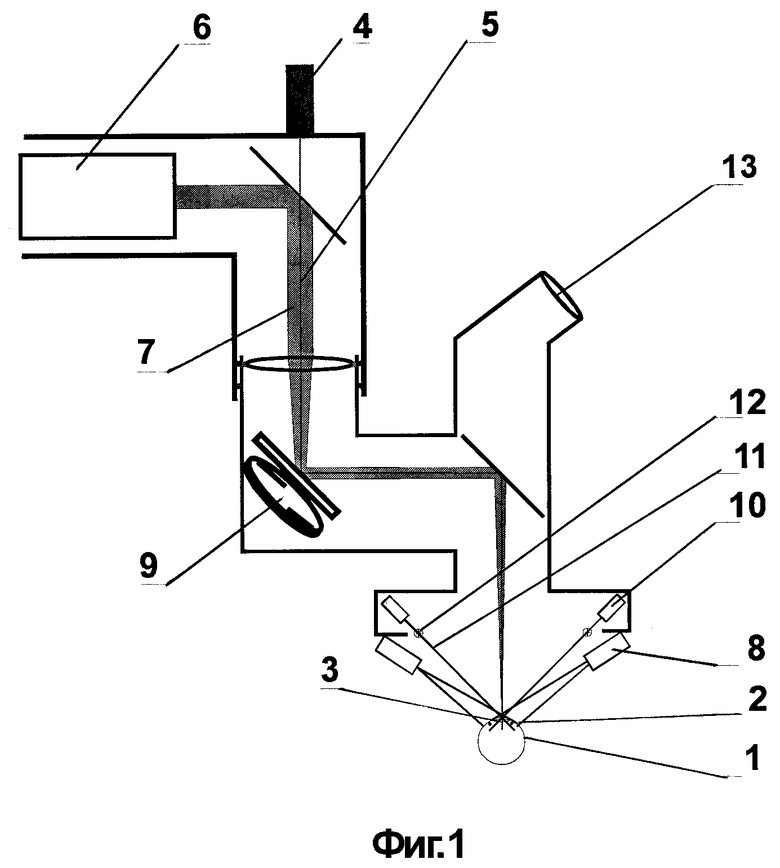
Способ позиционирования точки луча эксимерного лазера при операции на глазе путем определения оптической оси глаза с помощью выбранных реперных точек, координаты которых через компьютер сообщают системе сканирования с необходимыми поправками для производства следующего импульса лазера, отличающийся тем, что для определения оптической оси глаза выбранные реперные точки в виде меток наносят на роговицу глаза вне зоны оперативного вмешательства, а координаты этих точек в пространстве с помощью двух видеокамер передаются в компьютер, который управляет системой сканирования в трехмерном пространстве, обеспечивая фокус луча эксимерного лазера в нужной точке по совмещенным проекциям двух диафрагм, через которые проходят лучи диодных лазеров.
| US 5645550 A, 08.07.1997. |
