Изобретение относится к медицинской лазерной технике и может использоваться в офтальмологии для коррекции кривизны поверхности роговицы глаза с целью устранения или уменьшения миопии, гиперметропии и астигматизма.
Известен способ лазерной коррекции формы роговицы глаза (патент США №5219344, кл. 606/5, от 15 июня 1993 г.), заключающийся в том, что лазерный луч пропускают через гомогенизатор, маску, проекционную линзу, получая нужное распределение интенсивности в поперечном сечении пучка на поверхности роговицы глаза, и, контролируя время экспозиции, достигают заданной глубины абляции. Недостатком данного способа является то, что размер пятна абляции имеет относительно большие размеры, что снижает точность формообразования роговицы. Луч хирургического лазера не сканируют по заданной программе, что усложняет возможность операций по устранению астигматизма, а устранение аберраций высших порядков проблематично. Кроме того, известный способ основан на использовании высокоэнергитичного хирургического лазера, что удорожает применение данного способа.
Наиболее близким к предлагаемому является способ коррекции роговицы глаза (патент США № US RE37504 Е, кл. 606/5, от 8 января 2002 г.) путем удаления ткани роговицы сканируемым по заданной программе лазерным лучом, сфокусированным на роговице глаза в пятно диаметром 0,5-2 мм с плотностью излучения на единицу поверхности выше порога абляции. Недостатком известного способа является отсутствие в ходе операции автоматического контроля точности исполнения операции.
Известна установка для коррекции роговицы глаза, реализующая указанный способ (патент США № US RE37504 Е, кл. 606/5, от 8 января 2002г.) Данная установка содержит хирургический импульсно-периодический УФ-лазер, установленные на общей с хирургическим лазером оптической оси диафрагму, двухкоординатный гальваносканер, проекционную линзу, формирующую на поверхности глаза пациента световое аблирующее пятно излучения УФ-лазера, поворотное дихроичное зеркало, центрирующий лазер видимого диапазона, компьютерную систему управления и микроскоп. Недостатком известного устройства является отсутствие автоматизированного контроля точности работы установки в течение операции.
Задачей предполагаемого изобретения является исключение неточности проведения операций по лазерной коррекции формы роговицы глаза. Для решения этой задачи в способе лазерной коррекции формы роговицы глаза путем удаления ткани роговицы сканируемым по заданным координатам лазерным лучом, сфокусированным на роговице глаза пациента в аблирующее пятно площадью, меньшей площади корректируемого участка роговицы, с плотностью мощности на единицу поверхности выше порога абляции, перед началом операции и в ходе операции контролируют отклонение координат аблирующего пятна от заданного положения хотя бы в одной точке. Отклонение координат аблирующего пятна от заданного положения контролируют, направляя лазерный луч на фоточувствительное устройство определения относительных координат аблирующего пятна, расположенное вне зоны оперативного вмешательства. Ткань роговицы удаляют послойно, а отклонение координат аблирующего пятна от заданного положения контролируют перед снятием каждого слоя. Глубина каждого слоя в данной точке поверхности роговицы определяется соотношением а=А/n, где а - толщина каждого слоя в данной точке поверхности роговицы глаза, А - толщина всего слоя в данной точке поверхности роговицы глаза, запланированного для снятия в ходе всей операции, n - количество снимаемых слоев. Каждым удаляемым слоем роговицы изменяют оптическую силу линзы глаза на величину не более 0,25 диоптрии.
Контролировать перед началом операции и в ходе операции отклонение координат аблирующего пятна от заданного положения хотя бы в одной точке существенно, так как превышение допустимого отклонения координат аблирующего пятна от заданного программой свидетельствует о нарушении точности исполнения операции. Причиной подобных, хоть и маловероятных, но абсолютно недопустимых отклонений может быть выход из штатного режима работы аппаратных средств, обеспечивающих применение способа. Высокий уровень сложности аппаратных средств, обеспечивающих применение способа, не позволяет гарантировать полной безотказности в их работе. При контрольном импульсе лазерный луч направляется на фоточувствительное приемное устройство. Устройство управления обрабатывает приходящие от фотоприемного устройства сигналы. Если сигнал свидетельствует о превышении допустимых отклонений, производят тестирование состояния аппаратных средств для выявления и устранения неисправности. Операцию продолжают после выявления и устранения неисправности. Отклонение координат аблирующего пятна от заданного положения контролируется в точке, расположенной вне зоны оперативного вмешательства, что существенно, так как при проведении контроля пациент остается в исходном положении, при этом контроль производится на одиночных импульсах, то есть фактически без приостановки операции. Ткань роговицы удаляют послойно, а отклонение координат аблирующего пятна от заданного положения контролируют перед снятием каждого слоя, так как данные моменты оптимальны с точки зрения возможной остановки и последующего продолжения хода операции. Кроме того, это упрощает задачу по разработке алгоритма работы аппаратных средств при проведении различных видов операций, например при коррекции роговицы глаза, имеющего комбинацию миопии и астигматизма. Глубина каждого слоя в данной точке поверхности роговицы определяется соотношением а=А/n, где а - толщина каждого слоя в данной точке поверхности роговицы глаза, А - толщина всего слоя в данной точке поверхности роговицы глаза, запланированного для снятия в ходе всей операции, n - количество снимаемых слоев. При выполнении приведенного соотношения фактически каждый удаленный слой формирует поверхность роговицы, пропорционально промежуточную между исходной и требуемой. Такая поверхность является оптимальной с точки зрения возможной остановки и последующего продолжения хода операции. Каждым удаляемым слоем роговицы изменяют оптическую силу линзы глаза на величину не более 0,25 диоптрии, так как при возможной остановке операции искажение поверхности роговицы не превысит указанной относительно малой величины и поэтому пациент не ощутит дискомфорта независимо от времени вынужденного межоперационного перерыва.
Результатом предлагаемого способа лазерной коррекции формы роговицы глаза является исключение при проведении операции неточности формирования заданной поверхности. Технической задачей является создание устройства, позволяющего осуществить предлагаемый способ лазерной коррекции формы роговицы глаза.
В установке для лазерной коррекции формы роговицы глаза, содержащей корпус, закрепленные в нем хирургический импульсно-периодический лазер с энергией в импульсе, достаточной для абляции биологической ткани, установленные на общей с хирургическим лазером оптической оси: диафрагма, двухкоординатный гальваносканер, проекционная линза, формирующая на поверхности глаза пациента аблирующее пятно излучения хирургического лазера, дихроичное поворотное зеркало, микроскоп, центрирующий лазер видимого диапазона, оптическая ось которого совмещена с центром поля зрения микроскопа и оптической осью хирургического лазера в центральном положении зеркал гальваносканера, компьютерная система управления, в установку дополнительно введено фоточувствительное устройство определения относительных координат аблирующего пятна, соединенное с компьютерной системой управления. Фотоприемное устройство расположено вне зоны оперативного вмешательства. Устройство определения относительных координат аблирующего пятна установлено в зоне распространения не отраженного от дихроичного зеркала луча хирургического лазера. В качестве фотоприемного устройства определения координат используется фоточувствительная матрица. В качестве хирургического лазера используется аргонфторный эксимерный лазер с длиной волны излучения 193 нм.
Введение в установку для лазерной коррекции роговицы глаза фоточувствительного устройства определения относительных координат аблирующего пятна, соединенного в компьютерной системой, существенно, так как позволяет непосредственно перед операцией и в ходе операции в любой момент или периодически, или поэтапно, автоматически контролировать точность установки луча операционного лазера в рабочей зоне. Высокий уровень сложности аппаратных средств не позволяет гарантировать полной безотказности их работы. Возможны отклонения в режиме работы одного из исполнительных механизмов быстродействующего гальваносканера, например из-за образовавшихся в результате износа люфтов в опорах качения. Высокочастотная динамическая нагрузка может привести к микротрещинам и разрушению подвижного зеркала или узла крепления зеркала на гальваническом двигателе сканирующего устройства. Не исключено разрушение одного из зеркал, задействованных в наведении ультрафиолетового излучения хирургического лазера, например, в результате случайного попадания частиц пыли на его отражающую поверхность. Узел смены диафрагмы, как электромеханическое устройство, также может иметь погрешности в работе и некоторую вероятность отказа. В любой из отмеченных или в подобных ситуациях при контрольном импульсе на фотоприемное устройство попадает лазерный луч хирургического лазера с отклонением от заданных координат. Устройство управления обрабатывает приходящие с фоточувствительного приемника сигналы. Если сигнал свидетельствует о превышении допустимых отклонений, устройство управления приостанавливает операцию и переходит в режим тестирования работы хирургического лазера, узла сменной диафрагмы и гальваносканера. Операция будет продолжена после выявления и устранения неисправности. Фоточувствительное устройство определения относительных координат аблирующего пятна установлено вне зоны оперативного вмешательства, что существенно, так как при проведении контрольного измерения пациент остается в исходном положении, и поскольку для проведения контроля достаточно одиночных импульсов, фактически контроль производится без приостановки операции. Однозначное соответствие результатов контроля точности работы установки, производимое вне зоны оперативного вмешательства, обеспечивается тем, что и фотоприемное устройство и оперативная зона расположены в рабочем диапазоне гальваносканера. Кроме того, наличие фоточувствительного устройства определения относительных координат аблирующего пятна позволяет производить быстрое предоперационное тестирование и юстировку оптической схемы установки. Это необходимо, так как входящий в состав установки быстродействующий гальваносканер в силу конструктивных особенностей может иметь долговременный “дрейф” центрального углового положения зеркал. Поскольку время между операциями может составлять часы и сутки, то после длительного перерыва, перед операцией, с помощью устройства определения координат аблирующего пятна производится переустановка центрального положения зеркал гальваносканера. Одновременно при переустановке центрального положения зеркал гальваносканера компенсируются возможные микродеформации несущих элементов корпуса установки и входящих в него оптических узлов, которые могли возникнуть за время между операциями в результате случайных нарушений допустимых значений параметров окружающей среды (температура, вибрации, удары). Устройство определения относительных координат аблирующего пятна установлено в зоне распространения луча хирургического лазера, не отражаемого дихроичным зеркалом, что позволяет конструктивно удалить фотоприемное устройство от оперативной зоны и создать более комфортные условия для хирурга и пациента. В качестве приемной части определителя координат используется фоточувствительная матрица, что позволяет быстро и с высокой точностью регистрировать положение аблирующего пятна. В качестве хирургического лазера используется аргонфторный эксимерный лазер с длиной волны излучения 193 нм, что позволяет без дополнительных преобразований получить излучение для абляции роговицы глаза, оптимальное по длине волны и длительности импульса.
Техническим результатом предлагаемого устройства является осуществление способа лазерной коррекции роговицы глаза, исключающего погрешности в ходе операции.
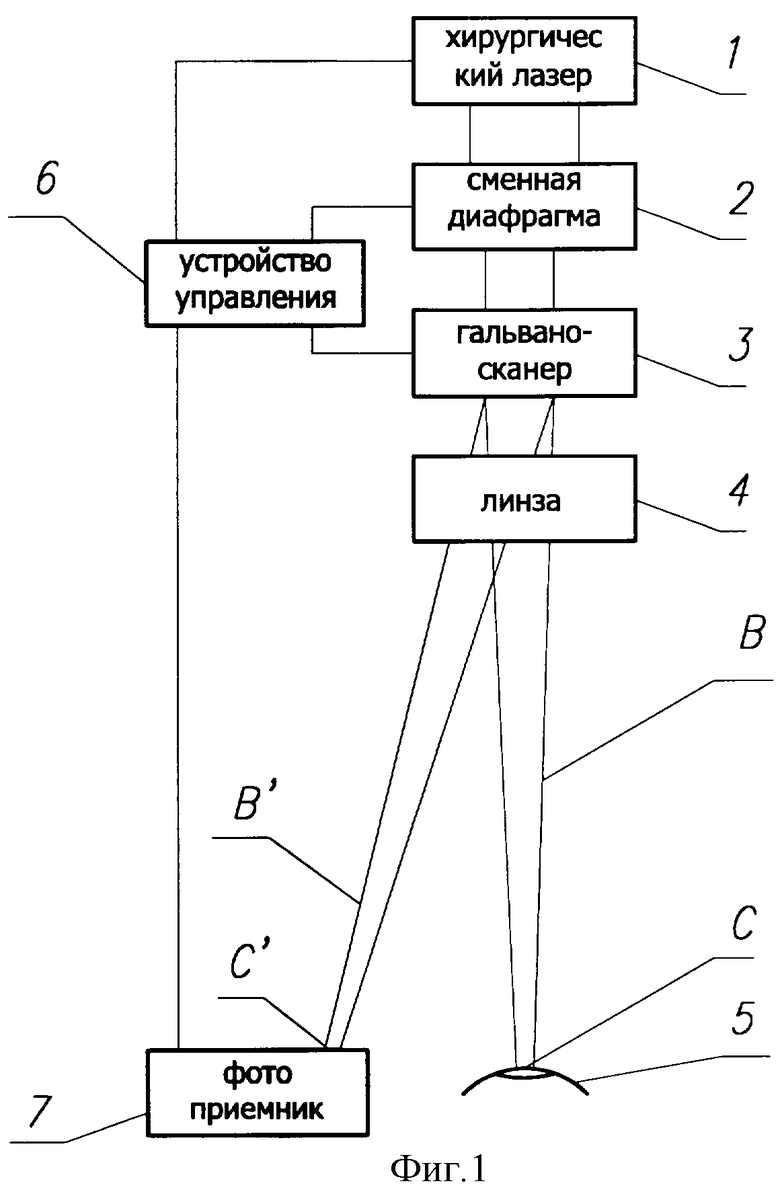
На фиг.1 изображена блок-схема предлагаемого технического решения.
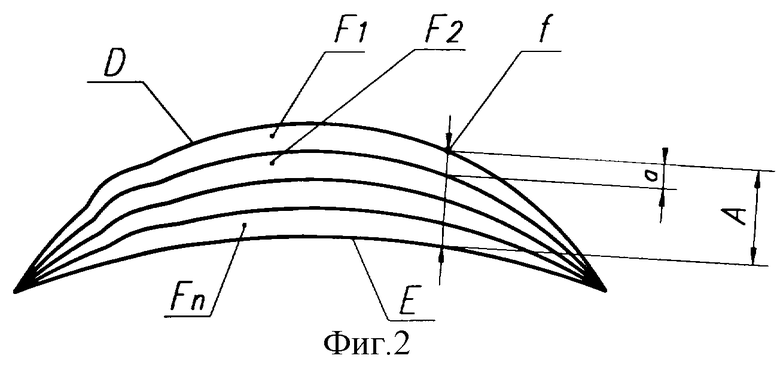
На фиг.2 схематически показаны сечения снимаемых слоев роговицы глаза.
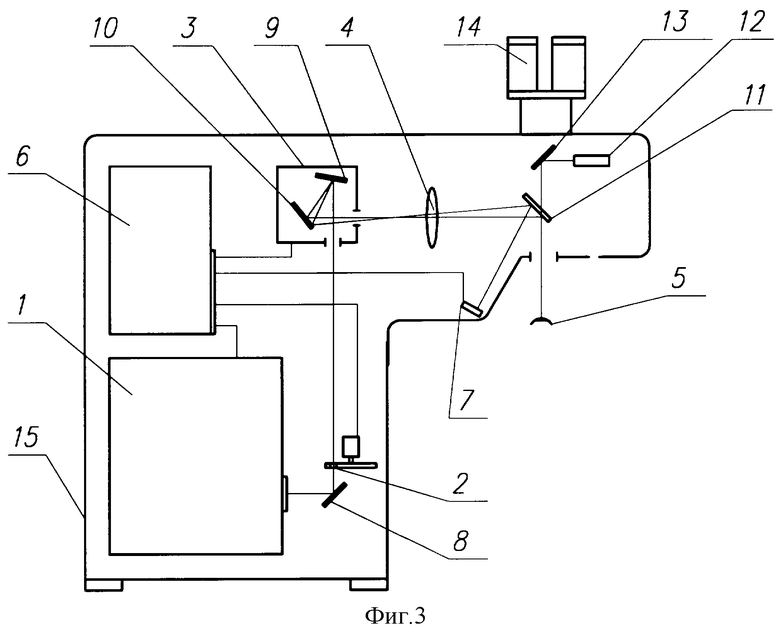
На фиг.3 показана конструктивная схема установки для лазерной коррекции формы роговицы глаза.
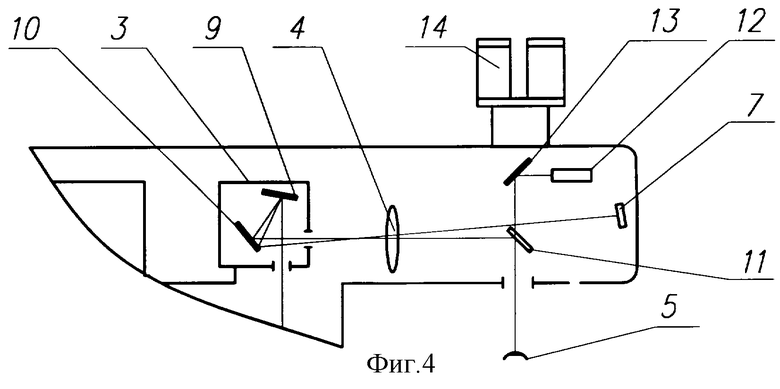
На фиг.4 показан вариант исполнения установки по фиг.3.
Предлагаемый способ лазерной коррекции роговицы глаза мы иллюстрируем по фиг.1, 2 и 3. На фиг.1 и 3 генерируемое хирургическим лазером поз.1 излучение пропускают через сменную диафрагму поз.2 и направляют гальваносканером поз.3 по заданному алгоритму через проекционную линзу поз.4 на мишень поз.5 (мишенью может являться роговица глаза пациента), создавая на ней при каждом импульсе излучения хирургического лазера поз.1 аблирующее пятно С. Управление лазером, сменной диафрагмой и гальваносканером производят от компьютерного устройства управления поз.6, а контроль точности исполнения команд - с помощью фоточувствительного устройства поз.7. В ходе операции периодически луч хирургического лазера отклоняют гальваносканером поз.3 в направлении В', создавая на устройстве определения координат пятно С'. Видимое излучение центрирующего лазера поз. 12 служит для совмещения перед операцией центральной оси глаза поз.5 с осью луча хирургического лазера поз.1 в центральном положении зеркал гальваносканера поз.3 (до включения хирургического лазера).
На фиг.2 кривые D и Е условно показывают форму роговицы глаза соответственно до и после проведения операции. Слои F1, F2,..., Fn занимают промежуточное положение между исходной (до операции) и окончательной (после операции) формой роговицы.
Предлагаемый способ реализуется следующим образом. Перед операцией, по результатам анализа топограммы реальной формы роговицы D и/или по результатам анализа искажений волнового фронта оптическим трактом глаза намечают контур формы роговицы Е, обеспечивающий желаемую оптическую коррекцию. Пациента размещают на трехкоординатном столе (на фиг.1-4 не изображен) и, управляя подвижной частью стола, выставляют пространственное положение пациента относительно установки таким образом, чтобы ось видимого излучения центрирующего лазера поз. 12 совпадала с центральной осью оперируемого глаза поз.5. Это свидетельствует о точном совпадении оси хирургического лазера поз.1 с центральной осью глаза поз.5 в исходном положении гальваносканера поз.3. Первый импульс излучения хирургического лазера поз.1 является тестирующим и направляется гальваносканером поз.3 на фоточувствительное устройство поз.7 для измерения его отклонения от заданного положения. В зависимости от величины отклонения возможен один из двух вариантов продолжения работы установки. Если при контроле возникает отклонение аблирующего пятна на величину, большую Н=0,05 мм (Н - допустимая погрешность децентрации при коррекции роговицы глаза), устройство управления поз.6 переходит в режим тестирования работы хирургического лазера поз.1, узла сменной диафрагмы поз.2 и гальваносканера поз.3. Если при контроле отклонение аблирующего пятна лежит в пределах Н, установка начнет выполнение операции. По заранее выбранному алгоритму и установленным под данную операцию параметрам устройство управления поз.6, синхронизируя работу хирургического лазера поз.1 и гальваносканера поз.3, обеспечивает в ходе операции заданное распределение аблирующих пятен на роговице глаза поз.5, причем каждый сто первый импульс направляется на фоточувствительное устройство поз.7 для контроля точности выполнения операции.
Снятие роговой оболочки производится послойно. Работа устройства управления поз.6 программируется исходя из условия абляции ткани роговицы слоями F, фиг.2, причем толщина каждого слоя F1…Fn в данной точке поверхности роговицы f устанавливается из соотношения а=А/n, где а - толщина каждого слоя в данной точке поверхности роговицы глаза, А - толщина всех слоев в данной точке поверхности роговицы глаза, запланированных для снятия в ходе всей операции, n - количество снимаемых слоев. При этом фактически каждым удаляемым слоем формируют поверхность корректируемой роговицы, пропорционально промежуточной между исходной поверхностью и поверхностью, требуемой для полной коррекции. Таким образом, оптическая сила роговицы меняется плавно, так что роговица в любой момент операции имеет форму, близкую к форме правильной линзы, способной формировать изображение на сетчатке глаза. Благодаря этому в случае необходимости прервать операцию пациент в период до ее возобновления не ощутит дискомфорта. Кроме того, не потребуются специальные меры для исправления роговицы, имеющей неправильную форму. Перед снятием каждого слоя роговицы гальваносканер поз.3 по команде устройства управления поз.6 направляет луч хирургического лазера на фоточувствительное устройство поз.7. При этом если отклонение луча В' от заданных координат превышает величину Н, то устройство управления поз.6 приостанавливает операцию и переходит в режим тестирования параметров хирургического лазера поз.1, устройства сменной диафрагмы поз.2 и гальваносканера поз.3. После устранения неисправности операцию продолжают с момента остановки заданной программы до полного завершения. Количество слоев n выбирается из условия допустимой ошибки формообразования роговицы в случае остановки операции. Приемлемой можно считать толщину слоя, изменяющую оптическую силу линзы глаза на величину не более 0,25 диоптрии.
Установка для лазерной коррекции формы роговицы глаза, фиг.3, содержит корпус поз. 15, закрепленные в нем хирургический импульсно-периодический лазер поз.1, установленные на общей с хирургическим лазером оптической оси: диафрагма поз.2, двухкоординатный гальваносканер поз.3, проекционная линза поз.4, дихраичное поворотное зеркало поз.11, микроскоп поз.14, центрирующий лазер поз. 12, компьютерная система управления поз.6, фоточувствительное устройство определения относительных координат аблирующего пятна поз.7, соединенное с компьютерной системой управления поз.6. В качестве хирургического лазера поз. 1 используется импульсно-периодический эксимерный аргонфторный лазер Модель CL-5000 производства ЦФП ИОФРАН с энергией в импульсе до 12 мДж и частотой следования импульсов 200 Гц. Использование в качестве хирургического лазера аргонфторного эксимерного лазера позволяет без дополнительных преобразований получать лазерные импульсы излучения с длиной волны 193 нм и длительностью менее 10 нс, что оптимально для абляции роговицы глаза. Кроме того, данный лазер обеспечивает высокочастотный режим работы при высокой воспроизводимости энергии от импульса к импульсу. Диаметр сменной диафрагмы поз.2 может устанавливаться в диапазоне от 1,4 до 3,2, и меняться в ходе операции в зависимости от особенностей конкретной операции. В качестве устройства сканирования лучом хирургического лазера поз.3 используется двухкоординатный гальваносканер Модель SCANgine 10 производства фирмы SCANLAB AG с подвижными зеркалами поз.9 и поз. 10, установленными на управляемых гальванических двигателях. Проекционная линза поз.4 имеет фокусное расстояние 456 мм, на рабочих поверхностях линзы нанесены просветляющие покрытия на длину волны 193 нм. Поворотное дихроичное зеркало поз.11 имеет высокий коэффициент отражения на длине волны 193 нм и пропускает излучение центрирующего лазера поз.12. В качестве центрирующего лазера поз.12 используется диодный лазер с длиной волны излучения 635 нм и мощностью не более 10-6ВА. В качестве фотоприемного устройства определения координат аблирующего пятна поз.7 используется фоточувствительная матрица на основе четырехсегментного датчика Quadrant, производство Centronic. Для точной установки мишени поз.5 используется микроскоп поз. 14 Модель OPMI с визирной сеткой, производства фирмы Zeiss. Система управления поз.6 выполнена на базе промышленного компьютера и соединена кабелями с хирургическим лазером поз.1, устройством смены диафрагмы поз.2, гальваносканером поз.3, а также устройством определения координат поз.7.
Установка на фиг.3 работает следующим образом. Излучение хирургического импульсно-периодического эксимерного лазера поз.1 с длиной волны 193 нм и энергией в импульсе до 10 мДж, отражаясь от поворотного зеркала поз.8, направляется через сменную диафрагму поз.2 в двухкоординатное гальванометрическое сканирующее устройство поз.3. Компьютерное устройство управления поз.6 по заданному алгоритму управляет зеркалами поз.9 и поз. 10, в результате отражения от которых луч отклоняется по двум координатам. Проекционная линза поз.4 отображает отверстие диафрагмы поз.2 на обрабатываемый объект поз.5, в качестве которого может быть роговица глаза пациента. Первый импульс излучения хирургического лазера поз.1 является тестирующим и направляется гальваносканером поз.3 на фоточувствительную матрицу поз.7 для измерения его отклонения от заданного положения. В зависимости от величины отклонения возможны варианты продолжения работы установки, указанные выше, в описании реализации способа лазерной коррекции роговицы глаза.
При длительном перерыве в работе установки (более 24 часов) первый импульс излучения хирургического лазера поз.1 также является тестирующим. Если в результате измерения отклонение центра аблирующего пятна от заданного положения составляет величину не большую G=0,20 мм (G – максимально возможная величина отклонения аблирующего пятна С хирургического лазера поз.1 от заданного положения, которая может возникать при длительном перерыве в работе установки или при воздействии на установку случайных внешних факторов, превышающих допустимые), то устройство управления вводит соответствующую поправку в центральное положение гальваносканера поз.3, то есть производится перекалибровка установки. При этом оптические оси хирургического и центрирующего лазеров совпадут. Устройство определения относительных координат аблирующего пятна поз.7 установлено вне зоны оперативного вмешательства, что позволяет, не усложняя существенно конструкцию, производить тестирование установки без остановки операции.
Устройство на фиг.4 работает аналогично. Конструктивное отличие от описанного примера состоит в размещении устройства определения координат поз.7 в зоне распространения неотраженного поворотным зеркалом поз. 11 луча хирургического лазера поз.1, то есть на большем удалении от оперативной зоны. Этим достигается более высокая эргономичность установки, так как обеспечиваются более комфортные условия как для хирурга, так и для пациента.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ХИРУРГИЧЕСКОЙ КОРРЕКЦИИ АНОМАЛИЙ РЕФРАКЦИИ ГЛАЗА | 2009 |
|
RU2405514C1 |
| Офтальмохирургическая рефракционная твердотельная лазерная система | 2018 |
|
RU2749346C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОФИЛЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2000 |
|
RU2183107C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОФИЛЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2001 |
|
RU2215501C2 |
| ОФТАЛЬМОХИРУРГИЧЕСКАЯ ЭКСИМЕРНАЯ ЛАЗЕРНАЯ СИСТЕМА | 2005 |
|
RU2301650C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОФИЛЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2000 |
|
RU2196558C2 |
| ОФТАЛЬМОХИРУРГИЧЕСКАЯ ЛАЗЕРНАЯ СИСТЕМА НА ОСНОВЕ ФЕМТОСЕКУНДНОГО ЛАЗЕРА | 2010 |
|
RU2423959C1 |
| СИСТЕМА ДЛЯ ПРОВЕДЕНИЯ ОФТАЛЬМОЛОГИЧЕСКОЙ РЕФРАКЦИОННОЙ ОПЕРАЦИИ | 2009 |
|
RU2500374C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ТОЧКИ ЛУЧА ЭКСИМЕРНОГО ЛАЗЕРА | 1999 |
|
RU2162675C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ОФТАЛЬМОЛОГИЧЕСКОЙ, В ЧАСТНОСТИ РЕФРАКЦИОННОЙ, ЛАЗЕРНОЙ ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2008 |
|
RU2480190C2 |
Изобретение относится к медицинской технике. Лазерную коррекцию формы роговицы глаза осуществляют путем удаления ткани роговицы сканируемым по заданным координатам лазерным лучом, сфокусированным на роговице глаза пациента в аблирующее пятно площадью, меньшей площади корректируемого участка роговицы. Перед началом операции и в ходе операции контролируют отклонение аблирующего пятна от заданного положения хотя бы в одной точке. Ткань роговицы удаляют послойно, а контроль отклонения аблирующего пятна производят перед снятием каждого слоя вне зоны оперативного вмешательства. Лазерная установка содержит хирургический импульсно-периодический лазер, расположенные на общей с хирургическим лазером оптической оси: сменную диафрагму, двухкоординатный гальваносканер, проекционную линзу, поворотное дихраичное зеркало, микроскоп, центрирующий лазер видимого диапазона, компьютерную систему управления и фоточувствительное устройство определения относительных координат аблирующего пятна, соединенное с системой управления. Технический результат - повышение точности формирования заданной поверхности. 2 с. и 6 з.п. ф-лы, 4 ил.
| Устройство для дозированного разлива жидкостей | 1933 |
|
SU37504A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
