Изобретение относится к навигационной технике, а именно к оптико-электронным системам автоматического сопровождения движущихся объектов.
Известны системы автоматического наведения и сопровождения движущихся целей, основанные на частотном, фазовом, амплитудном, на времяимпульсном и на амплитудно-фазовом принципах, которые могут быть использованы для подсветки объектов [1].
Известные координаты формируют сигналы, пропорциональные составляющим угла рассогласования в двух взаимно-перпендикулярных полостях управления. Эти сигналы поступают на следящий привод системы автоматического сопровождения цели, осуществляющий перемещение оптической системы координатора так, что в любой момент времени оптическая ось направлена на цель.
К причинам, препятствующим достижению ниже указанного технического результата при использовании известного устройства, относится то, что модуляция лучистого потока осуществляется механическим путем с помощью модулирующего диска, расположенного в фокальной плоскости объектива и приводимого во вращение с постоянной скоростью электродвигателя.
Известно также двухкорданное устройство для подвески с отклоняющим зеркалом для прецизионной оптической системы слежения, которое разработано фирмой TRW и предназначено для использования в составе оптической системы слежения [2].
В состав этого устройства входит карданный шарнир на гибкой подвеске, четыре электродинамических привода, арретирующий механизм, устройство согласования уровней сигнала для сопряжения с емкостным датчиком смещения и электронный блок. Емкостный датчик служит для формирования сигналов углового рассогласования по двум осям.
По обеим сторонам наружного кольца карданного подвеса располагаются два исполнительных механизма системы арретирования.
С наличием подвижных электромагнитных узлов связаны невысокая надежность и малое быстродействие указанных координаторов. Кроме того, конструкции этих координаторов не позволяют направить вдоль их оптических осей отраженных от зеркала лучей, а также известные координаторы цели осуществляют слежение только за целями, попадающими в прямое поле зрения, при "потере" цели координатор не функционирует, т.е. в нем не предусмотрен режим поиска цели.
Наиболее близким устройством того же назначения по совокупности признаков к заявляемому изобретению является устройство для определения двухмерных координат объекта (координатор цели) [2]. Прототип содержит первый и второй линейчатые оптико-электронные преобразователи (ОЭП) с трансформирующими изображение оптикой, входы которых подключены к выходу синхрогенератора, а выходы - к входам соответствующих блоков выделения сигнала цели (пороговых элементов).
При этом линейчатые ОЭП-ы установлены взаимно перпендикулярно так, чтобы оси вращения объектов проходили через оптические центры цилиндрических линз ОБ1 и ОБ2.
По взаимному запаздыванию (рассогласованию) стробимпульса и сигнала цели ФУС1 и ФУС2 вырабатывают управляющие сигналы, знаки и величины которых пропорциональны угловым координатам цели в двух взаимно-перпендикулярных плоскостях управления.
Однако известный оптико-электронный координатор не позволяет наводить лучи на объект и осуществить поиск цели в случае выхода его из поля зрения координатора.
Задача заявляемого изобретения заключается в расширении функциональных возможностей координатора путем обеспечения поиска наземной цели и его подсвета из космоса.
Технический результат при осуществлении изобретения заключается в том, что повышается точность измерения угловых координат цели, т.к. луч наводится на центр изображения цели.
Указанный технический результат при этом заключается в том, что в устройство, содержащее первое устройство наведения на объект, введено дополнительно второе устройство наведения, оптически сопряженное с источником излучения, первый и второй вычитающие усилители, первые и вторые исполнительные органы и зеркало. При этом первые выходы первого и второго устройств наведения подключены к соответствующим входам первого вычитающего усилителя, а вторые выходы - к соответствующим входам второго вычитающего усилителя. Выходы первого и второго вычитающих усилителей подключены к входам соответствующих исполнительных органов, кинематически связанных с зеркалом.
Первое и второе устройства наведения имеют одинаковые структурные схемы и включают электрически связанные друг с другом координатор цели (КЦ), формирователь сигналов поиска (ФСП), первый и второй датчики углового положения (ДУП1, ДУП2) и коммутаторы, а также третьи и четвертые исполнительные органы (ИО3, ИО4), кинематически связанные с координатором цели и датчиками углового положения.
На фиг. 1 представлена блок-схема системы для подсвета, где:
1 - объект;
2 - источник излучения;
3, 4 - (1, 2 соответственно) устройство наведения;
5, 6 - (1, 2 соответственно) вычитающий усилитель;
7, 8 - (1, 2 соответственно) исполнительные органы;
9 - зеркало; - нормаль к поверхности зеркала 9 в начале системы координат OXYZ.
- нормаль к поверхности зеркала 9 в начале системы координат OXYZ.
На фиг. 2 представлена блок-схема устройства наведения (3, 4), где:
10 - координатор цели;
11, 12 - (3, 4 соответственно) исполнительные органы;
13, 14 - (1, 2 соответственно) датчики углового положения;
15 - формирователь сигналов поиска;
16, 17 - (1, 2 соответственно) коммутаторы.
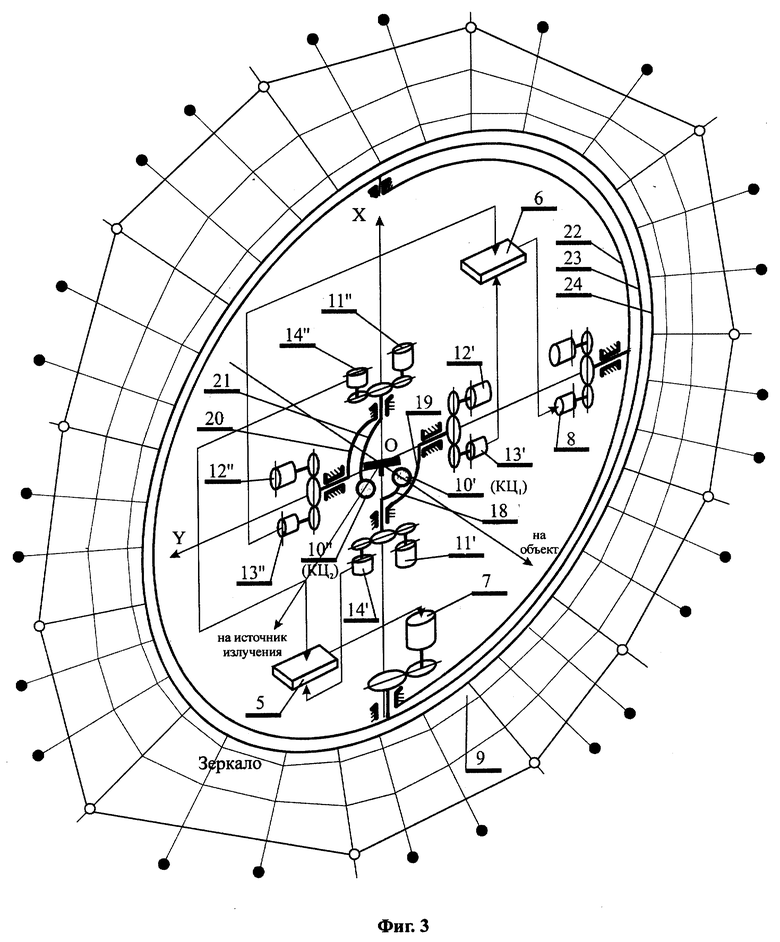
На фиг. 3 приведены совмещенные кинематические и оптические схемы системы, где наведение координатора цели (КЦ1) 101 первого устройства наведения УН13 на объект 1 осуществляется с помощью первого 18 и второго 19 кронштейнов исполнительных органов ИО3 и ИО4 серводвигателей 111, 121, угловые положения которого определяются с помощью датчиков углового положения (ДУП1 и ДУП2) (сельсинов или потенциометров) 13' и 14'. Наведение координатора цели 10'' второго устройства наведения на источник излучения (Солнце) осуществляется с помощью третьего 20 и четвертого 21 кронштейнов, механически связанных соответственно с валами исполнительных органов ИО3 и ИО4 (серводвигателей) 11'', 12'' и угловые положения которых определяются третьим ДУП3 13'' и четвертым ДУП 14'' датчиками углового положения второго устройства наведения.
Зеркало 9 установлено на карданном подвесе, состоящем из внутренней 22 и внешней 23 рам.
9 - зеркало, жестко установлено на кольце 24, шарнирно связанном с внешней рамой карданного подвеса 23, положение которого относительно внутренней рамы 22 изменяется с помощью первых исполнительных органов ИО1 (серводвигателей) 7. Положение внутренней рамы 22 относительно гидростабилизированной платформы изменяется с помощью вторых исполнительных органов ИО28.
На фиг. 4 приведена кинематическая схема устройства, которое обеспечивает вращение зеркала 9 и связанного с ним кольца 24 относительно концентричной внешней рамы 23 карданного подвеса.
С помощью кронштейна 25 концентричной внешней рамы 23 жестко устанавливается двигатель 26. На валу двигателя с помощью кронштейна 28 устанавливается вращающееся кольцо 24, на котором устанавливается двигатель 26. На валу 27 двигателя с помощью кронштейна 28 устанавливается вращающееся кольцо 24, на котором устанавливается зеркало 9. Конструкция зеркала включает стержни 29, кольца 30, сетку капроновую 31 с грузиками 32, лавсановую пленку 33 с отражающим металлическим (алюминиевым) покрытием 34, источник ЭДС.
Вращение вала 27 приводит к вращению кольца 24 и связанного с ним зеркала 9 относительно внешней рамы 23 карданного подвеса.
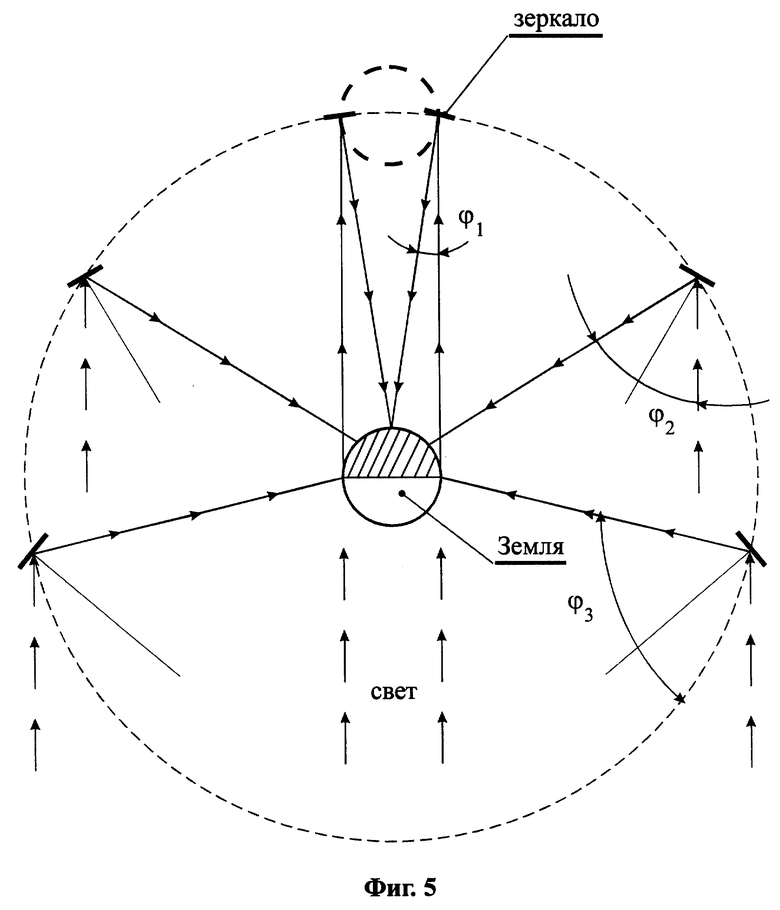
На фиг. 5 приведены различные положения зеркала (ϕ1÷ϕ6) относительно земли 35 при его вращении вокруг своей оси.
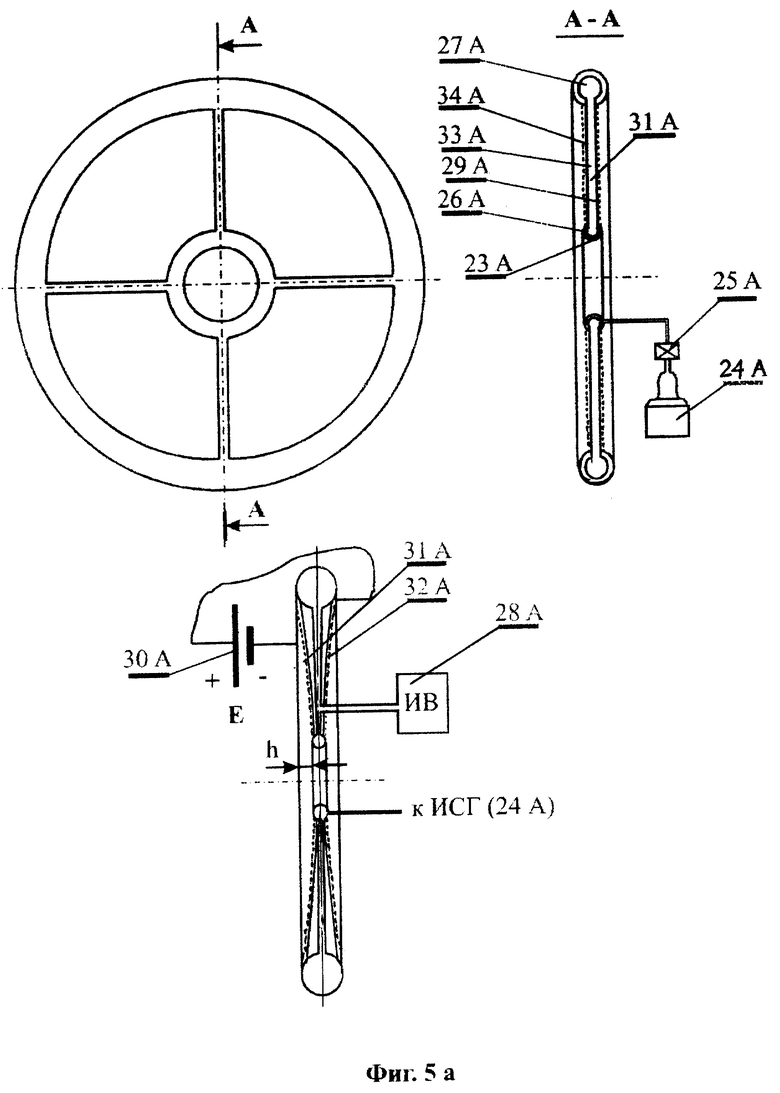
На фиг. 5А приведена конструкция второго варианта зеркала, где 23А - внешняя рама карданного подвеса; 24А - источник сжатого газа (воздуха); 25А - вентиль; 26А - внутренняя пневмокамера; 27А - внешняя пневмокамера; 28А - источник вакуума; 29А - радиальная трубка (складная); 30А - источник ЭДС; 31А, 32А - первое и второе зеркальное полотно; 33А - диэлектрическая эластичная пленка, покрытая отражающим свет металлическим слоем 34А.
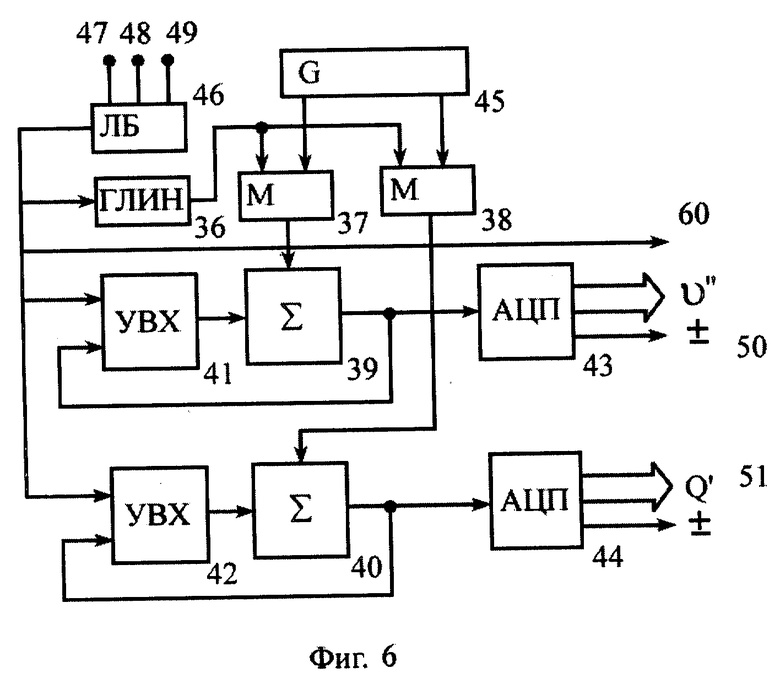
На фиг. 6 обозначены: 36 - генератор линейно изменяющегося напряжения (ГЛИН), выход которого подключен к управляющим входам первого 37 и второго 38 амплитудных модуляторов (М). Выходы модуляторов подключены к первым входам соответственно первого 39 и 40 сумматоров, вторые входы которых подключены к выходам соответственно первого 41 и второго 42 устройства выборки хранения (УВХ), а выходы - к входам соответственно первого 43 и второго 44 аналого-цифровых преобразователей (АЦП); 45 - квадратурный генератор (С); 46 - логический блок, входы которого являются соответственно первым 47, вторым 48 и синхровходом 49 формирователя сигналов поиска ФСП 15, а 50 и 51 - соответственно первый и второй его выходы.
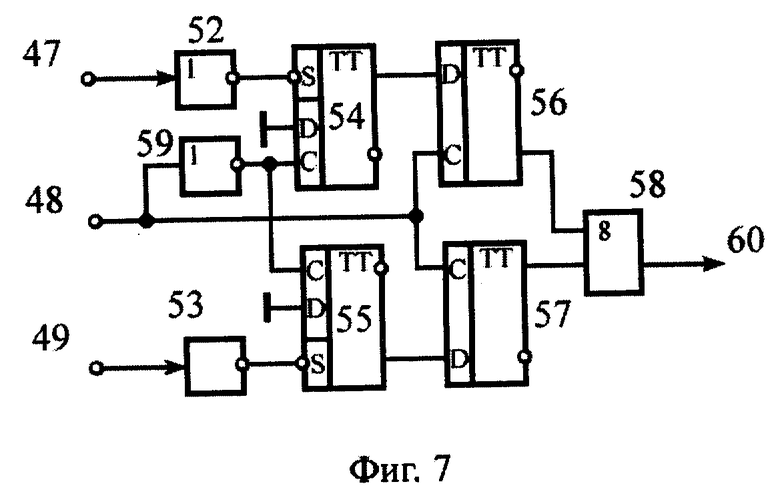
На фиг. 7 - функциональная схема логического блока 46, где 47, 48, 49 - первый, второй и синхровходы; 52 и 53 - первый и второй инверторы, выходы которых подключены к синхронным входам установки единицы соответственно первого 54 и второго 55 триггеров, выходы которых подключены к Д-входам первого 54 и второго 55 триггеров, выходы которых подключены к Д-входам соответственно третьего 56 и четвертого 57 триггеров, выходы которых в свою очередь подключены к входам элемента И 58; С-входы первых двух триггеров подключены к выходу третьего 54 инвертора. Выходы элемента И 58 являются выходом 60 логического блока 46.
Система для подсвета объекта работает следующим образом.
Для освещения городов, расположенных в области низких широт и экватора, систему для подсветки необходимо установить на гиростабилизированной платформе, расположенной на стационарной орбите с высотой около 36000 км. К числу преимуществ следует отнести неподвижность спутника с системой наведения зеркала относительно наземного объекта.
Вследствие большой высоты стационарной орбиты одной системой возможно подсветить по выбору большое количество наземных объектов.
Со спутника на стационарной орбите видна область Земли, простирающаяся на ±60o с запада на восток и на ±70o с севера на юг.
Экспрессная подсветка объектов в случае стихийных бедствий и аварий обеспечивается тремя системами, разнесенными на 120o вдоль экватора, охватывающими полностью земную поверхность, за исключением полярных областей.
На стационарной орбите спутник почти все время освещен Солнцем. Длительность пребывания его в тени Земли составляет лишь 1% периода вращения Земли, что приводит к высокой эффективности системы.
Зеркало поворачивается при слежении на 45o за 6 часов, т.е. вращается с угловой скоростью ϕ° = 7,5o/мин (угловых минут за минуту).
Вся система может быть обеспечена питанием солнечными батареями, которые постоянно направляются на Солнце устройством наведения 4.
Датчики наведения на Солнце обычно состоят из двух чувствительных элементов, электрически соединенных в мостовую схему. Одновременно в систему солнечной ориентации обычно входит датчик с круговым полем зрения, вырабатывающий информацию о направлении на Солнце с небольшой точностью, достаточной для ориентации на него поля зрения более точных датчиков устройства наведения 4.
Система для подсвета объекта устанавливается на гиростабилизированной платформе космического аппарата (КА). Все задачи управления полетом КА решаются системой управления. В число этих задач входят как ориентация и стабилизация положения КА в пространстве, так и направление КА при его перемещении в космическом пространстве и наведение по командам с Земли на те или иные объекты.
Сигналы, характеризующие физические параметры полета, получаются от системы датчиков.
Для ориентации используются датчики направления. Стабилизация КА осуществляется также по сигналам направления и по сигналам гироскопических датчиков, фиксирующих положение осей в пространстве.
Опорные параметры полета КА закладываются в память бортового ЭВМ, вводятся на борт КА по командной радиолинии от наземных станций или снимаются с гиростабилизированной платформы.
Сравнение фактических параметров полета с опорными, выделение сигнала ошибки и выработка на его основании управляющих сигналов осуществляются бортовым ЭВМ.
Вращение зеркала 9 вокруг двух взаимно перпендикулярных осей OX и OY осуществляется с помощью исполнительных органов ИО17 и ИО28. При наведении небольших зеркал нет необходимости в признаках 23 - 24. На фиг. 4 приведена конструкция зеркала, которая содержит вращающееся кольцо 24, к которому с помощью радиальных стержней 29 и вторичных капроновых ниток 31 прикреплены грузики (массивные предметы). Вращение внешнего кольца 24 обеспечивается с помощью электродвигателя 26 и кронштейна 45. При вращении кольца 24 за счет центробежных сил нитки 31 стягиваются и одновременно с ними стягивается лавсановая (фторопластовая) пленка 32, на которую нанесено отражающее свет покрытие 33. Пленка с покрытием может быть изготовлена аналогично той, что используется промышленностью для производства электролитических конденсаторов. Пленка из лавсана (фторопласта) толщиной 10-15 мкм, имеет однородную толщину и покрывается слоем алюминия толщиной 100  Такая пленка обеспечивает отражение ~94% падающего на него света.
Такая пленка обеспечивает отражение ~94% падающего на него света.
Под действием центробежных сил пленка и связанные с ней капроновые нитки стягиваются и пленка принимает форму плоскости. Для прижатия пленок друг к другу при создании зеркал сверхбольших размеров (десяток-сотен километров в диаметре) могут быть использованы электростатические силы. Для этого достаточно приложить к проводящим металлическим слоям небольшое напряжение. Меняя величину напряжения, возможно менять силу прижатия пленок друг к другу.
Используя такой метод, возможно создание зеркал любых размеров. Для этого необходимо сперва натянуть сетку, например, из капроновых ниток. Натяжение его обеспечивается за счет центробежных сил. Затем с двух сторон к сетке прикладывается пленка с металлическим (алюминия или серебра) отражающим покрытием, а затем к отражающему покрытию прикладывается напряжение. Под действием электростатических сил напряжения пленки прижимаются к сетке и принимают форму плоскости.
Изменение ориентации кольца 24 приводит к изменению ориентации всего зеркала.
Под действием солнечных лучей при больших размерах зеркала возможно под давлением солнечных лучей пленка примет сферическую форму. Это приведет к тому, что зеркало может подсветить участки Земли больших размеров, чем зеркало. Регулируя скорость вращения зеркала, массу грузиков, стягивающих пленку, возможно изменение радиуса кривизны сферического зеркала 9.
На фиг. 5А приведена конструкция второго варианта выполнения зеркала 9.
Зеркало устанавливается неподвижно на внешней раме 23А карданного подвеса. Зеркальное полотно 31А состоит из эластичной диэлектрической пленки 33А однородной толщины, покрытой отражающим светом металлическим слоем 34А. Зеркальное полотно может быть упрочнено мелкой капроновой сеткой.
Зеркальное полотно связано с внутренней 26А и внешней 27А концентричными пневмокамерами. Эти камеры соединены друг с другом радиальными складными гибкими трубками типа пожарных шлангов. Пневмокамеры тоже имеют гибкую конструкцию круглой формы типа велосипедных камер. Пневмокамеры с радиальными трубками образуют герметичную пневмосистему, которая через вентиль 25А связана с источником сжатого воздуха (ИСГ) 24А. После подачи газа (воздуха) пневмокамеры 26А и 27А принимают форму круга, а радиальные стержни - форму прямых, а вся пневмосистема принимает форму колеса. При этом зеркальное полотно растягивается и образуется плоское зеркало. Металлическое отражающее покрытие, например, из Al отражает 94% падающего на него света.
Преимущество этого вида конструкции зеркала заключается в том, что оно не вращается вокруг внешней рамы 23 карданного подвеса, а установлен на ней неподвижно. В этом случае отпадает необходимость в признаках 24 - 32 на фиг. 4, упрощается конструкция зеркала, оно становится более технологичным по своему выполнению и развертыванию в космосе.
Кроме того, вторая конструкция зеркала, основанная на пневмокамерах, позволяет получить сферические вогнутые зеркала больших размеров. Для этой цели вводится второе зеркальное полотно 32А. Первое 31А и второе 32А зеркальные полотна (см. фиг. 5А) совместно с внутренним 26А и внешним 27А пневмокамерами образуют герметичную полость, которая подключается к источнику вакуума 28А. В полости создается вакуум, более глубокий, чем с внешней стороны. За счет избыточного давления газа с внешней стороны первое 31А и второе 32А зеркальные полотна притягиваются друг к другу и принимают сферическую форму.
Для этой же цели, т.е. для притягивания зеркальных полотен 31А и 32А друг к другу, могут быть использованы электростатические силы притяжения. Для этой цели зеркальные отражающие металлические слои 34А обоих полотен устанавливаются с внешней стороны, источник вакуума отключается, т.е. внутри камеры такое же давление, какое снаружи. Металлические слои полотен подключаются к источнику ЭДС 30А (см. фиг. 5А). Под действием электростатических сил пленки принимают сферическую форму поверхности. В качестве рабочих поверхностей могут быть использованы обе поверхности зеркальных полотен 31А и 32А. Таким образом, в случае необходимости можно менять зеркало, повернув его на 180o относительно вертикали (см. фиг. 5А).
Стрела прогиба сферической поверхности (h) заранее рассчитывается и на эту величину (2h) внутренние кромки зеркальных полотен 31А и 32А сближаются друг с другом. Подбирая эластичность зеркальных полотен, величину ЭДС 30А или перепад давлений с двух сторон зеркальных полотен, можно добиться необходимого радиуса кривизны сферической поверхности и стрелки прогиба h зеркальной поверхности. Такая конструкция позволяет дистанционно, по командам с Земли, менять напряжение или глубину вакуума и формировать световые пучки необходимой конфигурации, например, сфокусировать пучок в одну точку.
В поле зрения первого устройства наведения УН1 3 попадает объект 1. В случае, когда объект не совпадает с оптической осью координатора УН1, сигналы управления на выходе КЦ не равны нулю.
Разностные сигналы координатора КЦ3 10 подаются на третьи ИО3 11 и четвертые ИО4 12 исполнительные органы (серводвигатели) для отработки. С помощью первого 18 и второго 19 кронштейнов и соответствующих серводвигателей 11 и 12 производится поворот координатора КЦ1 вокруг осей OX и OY. Оптическая ось КЦ1 всегда направлена в точку О, т.е. в центр сферы, по поверхности которого перемещается координатор КЦ1 10. После отработки сигналов рассогласования КЦ1 координатор КЦ1 10 становится в положение, когда его оптическая ось совпадает с направлением на объект (радиомаяк) 1. В случае, когда система для подсвета объекта устанавливается на подвижном объекте, например на борту летательного аппарата, она для "развязки" должна быть установлена на гиростабилизированной платформе. Угловое положение первого координатора цели КЦ1 10 относительно платформы в двух плоскостях управления может быть измерено с помощью первого ДУП1 13 и второго ДУП2 14 датчиков углового положения (сельсинов или потенциометров).
Для наведения остронаправленной антенны системы автоматического сопровождения по направлению (АСН) используется радиопеленгационный метод [4].
В радиодиапазоне вместо координатора цели КЦ1 и КЦ2 используются АСН1 и АСН2.
Передающая антенна радиолокационной станции РЛС устанавливается в центре подсвечиваемого объекта на земной поверхности (например, город) и излучает электромагнитные волны в окружающее пространство. Для уменьшения мощности радиолокационного устройства автоматического сопровождения объекта по направлению (АСН) на КЦ1 10 может быть установлен уголковый отражатель.
Уголковый отражатель состоит из трех отражающих пластин, скрепленных между собой так, чтобы плоскости были взаимно перпендикулярными. В уголковом отражателе падающая энергия от РЛС после двух- или трехкатного отражения от плоскостей трех пластин направляется в ту же сторону, откуда пришло излучение. Поэтому уголковый отражатель малых размеров может создать интенсивное отражение [4].
Передающая антенна РЛС с помощью устройства автоматического сопровождения объекта по направлению (АСН) наводится на уголковый отражатель и направляет на нее электромагнитные волны. Первое устройство автоматического сопровождения объекта по направлению (АСН1), в свою очередь, направляет ось первого координатора цели КЦ1 10 (совпадающую с равносигнальным направлением АСН1) на источник излучения - РЛС 1.
Устройство автоматического сопровождения объекта по направлению АСН и АСН1 3 могут быть выполнены по методу конического сканирования луча антенны или по моноимпульсному методу измерения угловых координат, обеспечивающим более высокую точность и позволяющим использовать как импульсное, так и непрерывное излучение энергии [4].
При использовании первого метода, как известно, при отклонении объекта от равносигнального направления максимум диаграммы направленности антенны, то приближается к объекту, то удаляется от него, вследствие чего импульсы отраженных сигналов модулируются по амплитуде с частотой конического сканирования луча, а глубина модуляции зависит от величины рассогласования. Кривая, огибающая вершины отраженных импульсов, является сигналом ошибки. Начальная фаза огибающей импульсов зависит от того, насколько отклоняется объект от равносигнального места по азимуту и углу места. Автоматическое сопровождение объекта сводится к тому, что ось антенны автоматически поворачивается до тех пор, пока сигнал ошибки не станет равным нулю. Когда сигналы ошибок обоих устройств АСН станут равными нулю, равносигнальные линии передающей и приемной антенн совпадают и ось первого координатора КЦ1 будет направлена на излучающую антенны РЛС1.
Второй координатор цели КЦ2 10'' наводят на Солнце с помощью третьего 20 и четвертого 21 кронштейн и кинематически связанных с ним третьим ИО3 11'' и четвертым ИО4 12'' исполнительными органами (серводвигателями) второго устройства наведения УН2 4 соответственно. Угловое положение координатора КЦ2 относительно гиростабилизированной платформы измеряется с помощью датчиков углового положения 13'' и 14''. При повороте КЦ2 вокруг осей OX и OY его оптическая ось всегда проходит через начало системы координат OXYZ.
ПЗС-линейки, используемые в координаторе для наведения на Солнце, не боятся локальных пересветок и не выходят из строя даже при тысячекратном превышении светового потока по сравнению с потоком насыщения. Для повышения помехоустойчивости координатора Солнца перед объективами ПЗС-линеек устанавливаются оптические фильтры, пропускающие излучение только в ближней ИК-области спектра, например, типа ИКС-7, и нейтральные светофильтры, которые уменьшают яркость изображения солнечного диска до необходимости величин.
При любых положениях координаторов цели КЦ1 и КЦ2 перемещаются по поверхности сферы, их оптические оси пересекаются в центре сферы О. Зеркало 9 установлено на корданном подвесе. Корданный подвес, состоящий из первой (внутренней) 22 и второй (внешней) 23 рам, кинематически связанных с первым ИО1 7 и вторым ИО2 8 исполнительными органами (серводвигателями 7 и 8) соответственно, обеспечивает поворот зеркала вокруг осей OX и OY.
Для направления падающих на зеркало солнечных лучей (совпадающей с оптической осью КЦ2) вдоль линии "О - цель" (совпадающей с оптической осью КЦ1) используются вычитающие усилители (блоки сравнения) ВУ1 5 и ВУ2 6.
Входы первого вычитающего усилителя ВУ1 5 подключены к выходам первого УН3 и второго УН2 4 устройства наведения. Выходы первого вычитающего усилителя ВУ1 подключены к входам первых исполнительных органов ИО1 7. ИО1 обеспечивает поворот зеркала вокруг оси OX. Первый и второй входы второго вычитающего усилителя ВУ2 6 подключены к вторым выходам первого УН1 и второго УН2 устройств наведения соответственно. Выход ВУ1 подключен к входу вторых исполнительных органов ИО2. ИО2 обеспечивают поворот зеркала вокруг оси OY.
Вычитающие усилители (блоки сравнения) 5 и 6 формируют разностные сигналы ΔU = U1 - U2, где U1 и U2 - напряжения, снимаемые с двух датчиков углового положения ΔU = U1 - U2 и УН1 и УН2, например, с потенциометров. Подвижные контакты потенциометров кинематически связаны с кронштейнами, с помощью которых координаторы цели КЦ1 и КЦ2 направляются на объект 1 и на источник излучения 2. Вычитающий усилитель выполнен на операционном усилителе. Разностный сигнал ΔU на выходе вычитающего усилителя пропорционален разности углов Δα (или Δβ) в двух плоскостях управления (XOZ и YOZ). Разностный сигнал ± ΔU поступает для обработки на соответствующие исполнительные органы ИО1 7 и ИО2 8. Исполнительные органы вращают зеркало вокруг осей OX и OY, сводя сигналы рассогласования к нулю.
При выходе из поля зрения хотя бы одного из оптико-электронных преобразователей, входящего в состав первого или второго координаторов цели КЦ1 и КЦ2, система переходит в режим "поиск". При этом входы третьих и четвертых исполнительных органов через первый 16 и второй 17 коммутаторы подключаются к выходам формирователя сигналов поиска ФСП 15.
Формирователи сигналов поиска ФСР 15 устройств наведения УН1 и УН2 формируют два сигнала, сдвинутые по фазе на 90o (sin ϕ , cos ϕ с линейно нарастающей амплитудой. При подаче таких сигналов исполнительные органы ИО3 11' и ИО4 12 (11'' и 12'') вращают КЦ1 и КЦ2 вокруг осей OX и OY так, что оптическая ось координатора сканируется по спиральной развертке.
После попадания Солнца в поле зрения второго координатора цели его излучение регистрируется с помощью оптико-электронных преобразователей КЦ2 10''. С его выходов на синхровходы 49 ФСП поступают синхроимпульсы с выходов синхрорегенератора, а на первый 47 и 48 входы ФСП - формированные сигналы с выходов блоков выделения сигналов цели. При наличии обоих сигналов с выходов блоков выделения сигналов цели. При наличии обоих сигналов система переходит в режим слежения. Коммутаторы 16 - 17 подключают ИО3 и ИО4 к выходам координатора цели КЦ1 10' (КЦ2 10'') УН1 и УН2.
Формирователи сигналов поиска (ФСП) 15 работают следующим образом (см. фиг. 6).
Если в промежутке между двумя соседними синхроимпульсами не появится импульс цели (хотя бы на одном из информационных входов ФСП), то на выходе логического блока 60 появится уровень логической единицы (работа логического блока будет рассмотрена ниже), который блокирует запись новой информации в УВХ 41 и 42. В момент переключения на выходе ЛБ 60 нуля в единицу, т.е. по переднему фронту, напряжение на выходе ГЛИН 36 обнуляется и начинает линейно нарастать (с нуля).
Выходное напряжение ГЛИН модулирует посредством модуляторов 37 и 38 гармонические сигналы с выходов квадратурного генератора 45. Причем сигналы на выходах генератора 45 сдвинуты по фазе на 90o. Это позволяет получить на выходах амплитудных модуляторов 37 и 38 гармонические сигналы, сдвинутые по фазе на 90o (синус и косинус), с линейно нарастающей амплитудой.
На выходах сумматоров 39 и 40 появляются напряжения, равные сумме напряжений на выходах модуляторов соответственно 37 и 38 и УВХ соответственно 41 и 42, т.е. UУВХ + UМ = UΣ ; здесь UУВХ, UМ, UΣ - напряжения на выходах соответственно УВХ, модулятора и сумматора.
АЦП 43 и 44 преобразуют напряжения на выходах сумматоров соответственно 39 и 40 в цифровой сигнал. Если от ФПС требуется управляющий сигнал в аналоговой форме, то необходимость в АЦП 43 и 44 отпадает.
Подавая сигнал с выходов сумматоров 39 и 40 (посредством АЦП 43 и 44) на третьи и четвертые исполнительные органы устройств наведения УН1 и УН2, обеспечивающие поворот КЦ1 10 (10'') в двух взаимно перпендикулярных плоскостях вокруг осей OX и OY системы координат OXYZ, связанной с гиростабилизированной платформой, добиваются сканирования пространства. Положение начала спирали зависит от напряжения на выходах УВХ 41 и 42, т.е. эти напряжения пропорциональны тангенсам угловых координат.
Если в поле зрения координатора КЦ10 появляется радиомаяк или солнце, то излучение регистрируется с помощью ОЭП-ов, и на выходах блоков выделения цели БВП появляются импульсы выделения цели [5], которые обеспечат уровень логического нуля на выходе ЛБ 60. В этот момент (по заднему фронту импульса на выходе ЛБ 46) в УВХ 41 и 42 записываются мгновенные (текущие) значения напряжений на выходах сумматоров соответственно 39 и 40, а также обеспечивается нулевое напряжение на выходе ГЛИН. И пока цель будет находиться на пути луча, логический блок будет формировать "1", что обеспечивает нулевое напряжение на выходе ГЛИН 36, а на выходе сумматоров 39 и 40 напряжение не будет меняться, т.к. в УВХ 41 и 42 хранятся величины напряжений, сформированные на выходах сумматоров 39 и 40 в момент прихода "0" на выходе ЛБ 46 (т.е. UУВХ = UΣ , а на выходе ГЛИН - "0" (т.е. UМ = 0).
Т.о. обеспечивается неподвижное положение зеркала 9. Если цель уходит из поля зрения КЦ 10 или (10''), то на выходе ЛБ 46 появится уровень логической единицы, ГЛИН начинает вырабатывать линейно-нарастающее напряжение, блокируется запись в УВХ 41 и 42 и процесс (спиральная развертка) начинается, причем центр спирали находится на прямой, которая перекала цель в момент ее "ухода" из поля зрения координатора цели.
Если в поле зрения координатора цели не появилась цель и напряжение на выходе ГЛИН выросло до какого-либо наперед заданного значения (которое определяется полем зрения системы), то ГЛИН сбрасывает выходное напряжение и весь описанный процесс начинается заново.
Квадратурный генератор 45 может быть реализован так, как указано на рис. 5.12, стр. 137 [7]. УВХ - так, как указано на рис, 3.1, стр. 77 в [7], при этом, чтобы УВХ и сумматоры были бы неинвертирующими, необходимо последовательно с ними включать инверторы с единичным коэффициентом передачи - 1 (см. рис. 1.8 "в", стр. 18 в [7]).
АЦП может быть реализован по схемам, приведенным в [6] (см. рис. 24, 23, стр. 458).
В качестве амплитудных модуляторов могут быть использованы типовые амплитудные модуляторы, причем управляющие входы которых подключены к выходу ЛБ, а входы для несущей частоты - к соответствующим выходам квадратурного генератора.
ГЛИН может быть реализован на основе типового генератора нарастающей "пилы".
В описываемом формирователе могут быть использованы микросхемы типа К153УД2, К140УД7, К140УД8, К154УД2, полевые транзисторы с изолированным затвором, конденсаторы с малым значением тангенса угла потерь и т.д.
Логический блок 46 можно реализовать так, как указано на фиг. 7. ЛБ функционирует следующим образом.
Синхроимпульс, пришедший на вход 48 посредством инвертора 59, обнуляет первый 54 и второй 55 триггеры, причем это происходит по заднему фронту синхроимпульса, т.к. применяются триггеры на микросхемах типа К155ТМ2, которые переключаются при переключении "0" в "1".
По переднему фронту синхроимпульса информация из указанных триггеров переписывается в третий 56 и четвертый 57 триггеры (эти триггеры также реализованы на микросхемах типа К155ТМ2). Такая работа четырех триггеров обеспечивается тем, что импульсы на их синхровходы поступают в противофазах.
Первый 54 (или второй 55) триггер будет в единичном состоянии, если в текущий период между двумя соседними синхроимпульсами с соответствующего блока выделения цели (БВЦ) на вход 47 (49) придет импульс цепи, иначе - в нулевом состоянии. Эта информация после прихода синхроимпульса переписывается в третий 56 (четвертый 57) триггер.
Т. о. , на прямом выходе третьего 56 (четвертого 57) триггера появляется логическая единица, если в прошедшем промежутке между двумя соседними синхроимпульсами появится импульс объекта с выхода соответствующего БВЦ, иначе - нулевое значение сигнала.
Нулевое состояние хотя бы одного из двух 56 и 57 триггеров обеспечивает уровень логического нуля на выходе ЛБ. Это обеспечивает элемент И58, который может быть реализован на микросхеме типа К155ЛИ1.
Инверторы могут быть реализованы на микросхеме типа К155ЛН1.
Исполнительные органы в системах для подсвета могут быть использованы гироскопические, электромеханические и электрогидравлические. Первые предпочтительнее, так как являются безинерционными [1]. В этом случае при отклонении оси координатора от направления коррекционные датчики, на которые посылаются сигналы перекрестным образом и связанные с осями рам, создают вращающие моменты, под действием которых гироскоп прецессирует в направлении совмещения подсвета объекта.
Измеряя силу тока в обмотках корреляционных датчиков (величина моментов), можно определить проекции вектора угловой скорости линии визирования на два взаимно перпендикулярные направления [1]. Установив на осях вращения рамок координатного узла движки потенциометрических датчиков, можно определить угловые координаты относительно платформы, на которой закреплен гироскоп. В этом случае корпуса датчиков должны быть жестко связаны с платформой [1].
В качестве серводвигателей в электромеханических установках автоматического сопровождения можно использовать двигатели постоянного тока [1]. С учетом величины и знаков выходных сигналов серводвигатели устраняют рассогласования между осью координаторов и направлением на цель. На осях вращения рамок координатного узла останавливают движки потенциометров или сельсины, в которых снимаются сигналы, опережающие угловое положение координаторов цели относительно оси управляемого объекта.
Для получения сигнала пропорционально угловой скорости линии визирования используются тахогенераторы, кинематически связанные с валами серводвигателей. Эти же тахогенераторы могут быть использованы как элементы гибкой обратной связи. Для управления объектом используется информация об угловом положении и угловой скорости линии визирования следящего привода. Сигналы, пропорциональные угловому положению координаторов, снимаются с потенциометров или сельсинов-датчиков, установленных на осях вращения рамок корданного подвеса. А сигналы, пропорциональные угловой скорости визирования, снимаются с сопротивлений, включенных в цепи обмоток коррекционных датчиков моментов гироскопического привода или с тахогенераторов, кинематически связанных с серводвигателями электромеханического привода.
Кроме автоматического подсвета наземных объектов, устройство обеспечивает выдачу информации об угловом положении цели относительно оси OZ. Для этой цели используется информация об угловом положении наземного объекта, снимаемая с выходов ДУП1 13 и ДУП2 14. Разработанная система по сравнению с прототипом обеспечивает автоматическую подсветку наземных объектов с космоса. При этом повышается точность измерения угловых координат цели, т.к. луч наводится на центр изображения цели.
Источники информации
1. Криксунов Л.З., Усольцев И.Ф. Инфракрасные системы. М., "Сов. Радио", 1968, стр. 157 - 239.
2. Шумейко И. И. (редактор). Астронавтика и ракетодинамика. Экспресс-информация, Т 43, М., 1989, стр. 27 - 34.
3. Заявка ФРГ N 3412076, G 01 B 11/03. Устройство для определения двумерных координат световой точки.
4. Патент США N 3946233. Система оружия для обнаружения и использования против неподвижных и движущихся целей.
5. Сонин Е.К. Радиоэлектронное оборудование космических аппаратов. М., "Энергия", 1972 г., стр. 6 - 17, 24 - 33, 72 - 92.
6. Шило В.Л. Линейные интегральные схемы. М., "Сов. Радио", 1979, стр. 158.
7. Алексенко А.Г., Коломбет К.А., Старобуд Г.И. Применение прецизионных аналоговых ИС. М., "Сов. радио", 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2185695C1 |
| ПЛЁНОЧНЫЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2002 |
|
RU2207675C1 |
| РЕГУЛИРУЕМЫЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2183890C2 |
| РАСКРЫВАЕМЫЙ ПЛЕНОЧНЫЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2325740C2 |
| СОЛНЕЧНЫЙ ПАРУСНЫЙ КОРАБЛЬ | 2003 |
|
RU2269460C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2005 |
|
RU2300663C1 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2004 |
|
RU2280782C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |


Система для подсвета объекта относится к навигационной технике, а именно к оптико-электронным системам автоматического сопровождения движущихся объектов. Технический результат заявляемого изобретения заключается в расширении функциональных возможностей координатора путем обеспечения поиска наземной цели и его подсвета из космоса, а также заключается в том, что повышается точность измерения угловых координат цели, т.к. луч наводится на центр изображения цели. Этот технический результат достигается тем, что в устройство, содержащее первое устройство наведения на объект, введено дополнительно второе устройство наведения, оптически сопряженное с источником излучения, первый и второй вычитающие усилители, первые и вторые исполнительные органы и зеркало. При этом первые выходы первого и второго устройств наведения подключены к соответствующим входам первого вычитающего усилителя, а вторые выходы - к соответствующим входам второго вычитающего усилителя. Выходы первого и второго вычитающих усилителей подключены к входам соответствующих исполнительных органов, кинематически связанных с зеркалом. 8 з.п. ф-лы, 7 ил.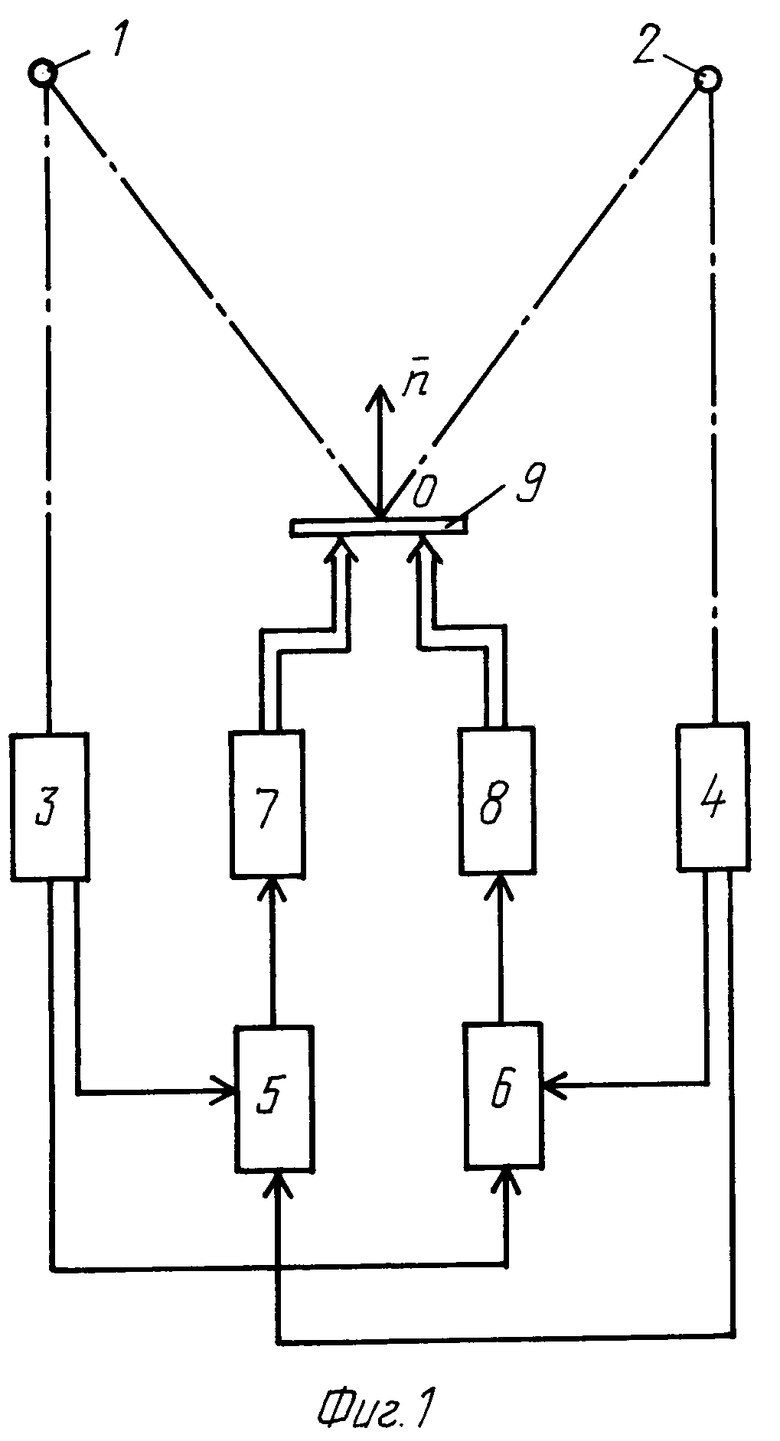
| DE 3412076 A1, 03.10.1985 | |||
| US 3946233 A, 23.03.1976 | |||
| ПОВТОРНО ГЕРМЕТИЗИРУЕМЫЙ МНОГОСЛОЙНЫЙ МАТЕРИАЛ ДЛЯ ТЕРМОГЕРМЕТИЗИРУЕМОЙ УПАКОВКИ | 2011 |
|
RU2608284C2 |
| 0 |
|
SU155494A1 | |
| РЕГУЛЯТОР ОТНОШЕНИЯ ДАВЛЕНИЙBCf^cofosHAa ?|МГ1г1Пш-;(АШ';Е-нд||. | 0 |
|
SU310235A1 |
| КРИКСУНОВ Л.З | |||
| и др | |||
| Инфракрасные системы | |||
| - М.: Советское Радио, 1968, с.157-239. | |||

