Изобретение относится к космической технике, конкретно к конструкциям солнечного парусного корабля (СПК), использующимся для управления движением солнечного светового давления. Кроме того, СПК может применяться в качестве отражателя для освещения наземных объектов в ночное время.
Сущность изобретения состоит в том, что СПК содержит основной и дополнительный парусы кольцевой формы. Они установлены на карданных подвесах. Дополнительный парус выполняет функцию компенсатора кинетического момента основного паруса. Управляя относительной угловой скоростью вращения дополнительного паруса, достигается ориентация относительно продольной оси корабля. Ориентация относительно поперечных осей достигается за счет процессии системы при изменении ориентации дополнительного паруса, установленного на карданном подвесе.
Изобретение относится к использованию солнечной энергии для обеспечения движения космического аппарата (КА) с помощью солнечного паруса, воспринимающего световое давление.
Известен КА с солнечным парусом, содержащий корпус, гибкую поверхность, средство ее формирования, включающее устройство закрутки и средство управления ориентацией гибкой отражающей поверхности [1]. Конструкция КА, взятого в качестве аналога, неэффективна из-за потери полезной площади паруса и увеличения удельной массы СПК на единицу площади поверхности.
Наиболее близким из известных технических решений является космический аппарат с солнечным парусом [2], который может быть указан в качестве прототипа.
Прототип содержит корпус, гибкую поверхность, средство ее формирования, включающее устройство закрутки и средство управления ориентацией гибкой отражающей поверхности. Корпус КА выполнен в виде двух шарнирно соединенных частей, с одной из которых связана гибкая отражающая поверхность. При этом средство формирования снабжено установленным на другой части корпуса трансформируемым маховиком, выполненным в виде дополнительной гибкой отражающей поверхности. Устройство закрутки выполнено в виде механизма противовращения основного и дополнительного парусов. Средство управления ориентацией основной гибкой отражающей поверхности в пространстве выполнено в виде устройства изменения угла между продольными осями частей корпуса.
К недостаткам прототипа относится сложность конструкции механизма излома продольной оси КА в двухстепенном шарнире, с помощью которого достигается ориентация системы относительно поперечных осей.
Кроме того, средство формирования гибкой поверхности, включающее устройство закрутки, также имеет сложную конструкцию и большой вес.
Указанные недостатки прототипа приводят к увеличению удельной массы СПК на единицу площади поверхности.
Технической задачей данного изобретения является уменьшение инертности управления солнечным парусом (СП), развертывание гибкой поверхности СП по заданной программе, а также увеличение тяги СПК и массы полезного груза за счет уменьшения удельной массы СП на единицу площади поверхности.
Данная техническая задача решается за счет того, что в солнечном парусном корабле, содержащем корпус, основную и дополнительную гибкие поверхности, средства формирования и управления ориентацией основной и дополнительной гибких поверхностей выполнены в виде пневмосистем, включающих в себя концентричные пневмокамеры и радиальные стойки, состоящие из отдельных пневмоячеек формы тора или шара.
Средства управления гибких отражающих поверхностей выполнены в виде карданных подвесок с электроприводами.
На внешних рамах карданных подвесок установлены соответствующие средства формирования отражающих плоских поверхностей и устройства для их раскрутки, выполненные в виде пневмосистем.
Пневмосистемы при этом содержат в себе концентричные пневмокамеры и радиальные стойки. Они выполнены в виде гибкой трубки, внутри которой эквидистантно установлены клапана с отверстиями, которые пропускают газ только в одном направлении при превышении давления выше установленного уровня. Вокруг отверстий клапана на трубке наращены пневмоячейки формы тора или шара, взаимодействующие друг с другом.
На фиг.1 приведен общий вид СПК, где:
1 - корпус;
2 - основная гибкая поверхность;
3 - дополнительная гибкая поверхность;
4, 5 - первый и второй карданные подвесы;
6, 7 - первое и второе устройства раскрутки;
8, 9 - первая и вторая пневмосистемы формирования поверхности.
xiyizi; αiβi; (i=1,2) - система координат и углы поворота карданных подвесок 4 и 5;
ωi (i=1,2) - угловые скорости вращения гибких поверхностей 2 и 3.
На фиг.2 приведена конструкция карданного подвеса с пневмосистемой формирования поверхности и устройством ее раскрутки, где:
10 - стойки установочные;
11, 12 - внутренняя и внешняя рамы карданного подвеса;
13, 14, 15 - первая, вторая и третья электродвигатели соответственно;
16 - обруч;
17 - колесо;
18 - внутренняя пневмокамера.
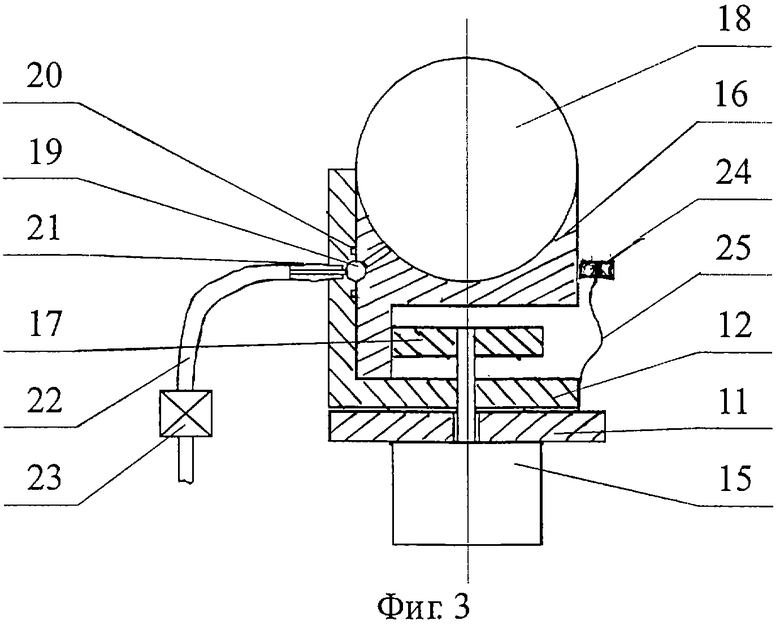
На фиг.3 представлена конструкция устройства закрутки гибких поверхностей 8 или 9 (I вариант), где позиции 11-18 те же, что на фиг.2.
19 - канавка;
20 - уплотнительные прокладки;
21 - штуцер;
22 - шланг;
23 - вентиль;
24 - подшипники;
25 - подпружинное крепление подшипников.
На фиг.4 приведена конструкция второго варианта устройства раскрутки, где позиции 11-24 те же, что на фиг.3.
26 - обмотка ротора;
27 - обмотка статора;
28 - металлические кольца;
29 - диэлектрические кольца;
30 - щетки;
31 - электропровода.
На фиг.5 приведен общий вид пневмосистемы формирования поверхности 6 и 7, где:
18 - внутренняя пневмокамера;
32 - внешняя пневмокамера;
33 - средняя пневмокамера;
34 - радиальные стойки;
35 - растяжки;
36 - гибкая отражающая планка.
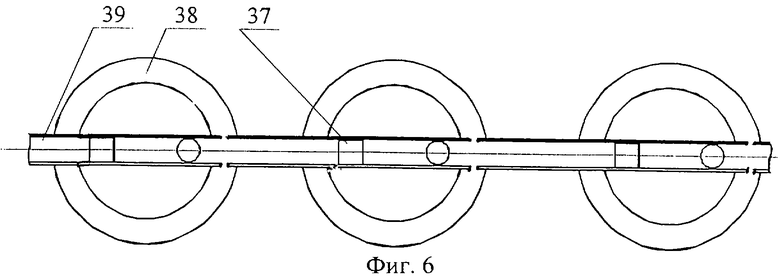
На фиг.6 показано место установки клапана 37 для пневмоячеек тороидальной формы 38, переплетенных в цепь.
39 - трубка эластичная;
На фиг.7 клапана 37 соединяют между собой последовательно пневмоячейки тороидальной формы 40, образуя «гирлянду».
На фиг.8 клапана соединяют между собой пневмоячейки формы шара 41.
На фиг.9 приведена конструкция первого варианта клапана 37, где:
42 - втулка цилиндрическая;
43 - шарик;
44 - пружина;
45 - заглушка;
46 - отверстия;
47 - электропровод;
48 - спираль.
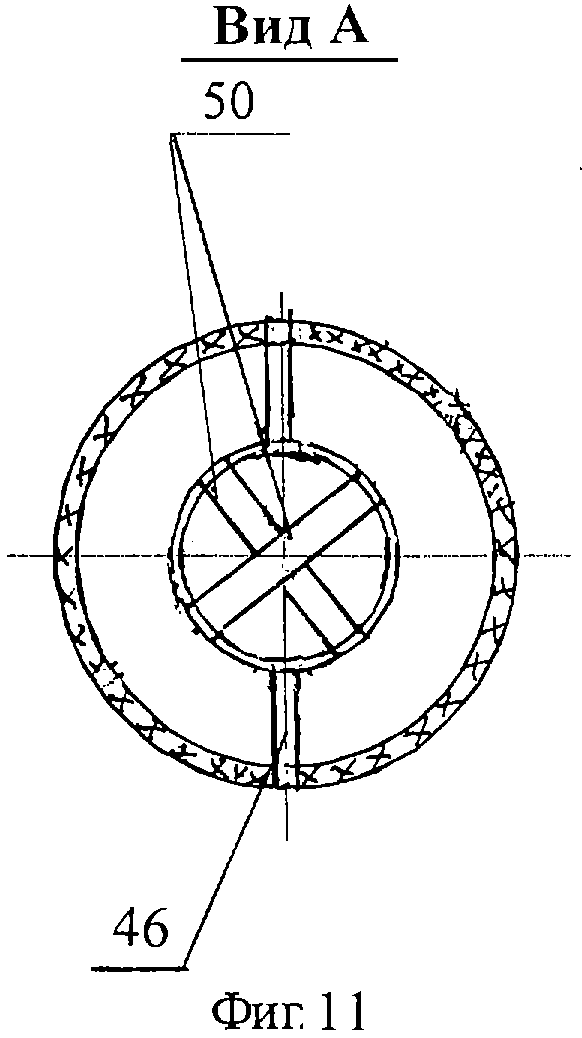
На фиг.10 приведена конструкция второго варианта клапана 37, где:
49 - позиции 45-48 те же, что на фиг.7; вторая цилиндрическая втулка;
50 - эластичные полоски;
51 - заглушка вторая;
52 - отверстие в гибкой трубке.
На фиг.11 приведен вид А по фиг.10.
Солнечный парусный корабль (СПК) функционирует следующим образом.
СПК содержит цельный корпус 1, основной 2 и дополнительный 3 паруса. В транспортном состоянии паруса уложены и занимают небольшой объем. Паруса установлены на однотипных карданных подвесах. При управлении и изменении ориентации парусов относительно поперечных осей ОХi и OYi центры их Оi не меняют свое положение, что существенно упрощают алгоритмы их управления.
Основная гибкая отражающая поверхность (парус 2) устанавливается с помощью первого карданного подвеса 4. Карданный подвес поворачивает парус 2 вокруг осей O1X1 и O1Y1 на углы ±α1 и ±β1, соответственно. При этом плоскость паруса (X1O1Y1) при любом его положении проходит через начало координат O1. Аналогично, с помощью второго карданного подвеса 5 устанавливается вторая дополнительная гибкая поверхность (парус 3). Поворачивая вокруг осей O2Х2 и O2Y2 ±α2 ±β2 обеспечивается изменение ориентации дополнительного паруса 3.
Начало координат O1 и O2, через которые проходят плоскости парусов 2 и 3, совпадает с продольной осью корпуса СПК цилиндрической формы.
На внешних рамках карданных подвесов 4 и 5 устанавливаются первое 6 и второе 7 устройства раскрутки соответственно.
Устройства раскрутки обеспечивают вращение основного и дополнительного парусов с угловыми скоростями вращения +ω1, и -ω2 в противоположных направлениях.
На вращающихся обручах 17 устройств раскрутки 6 и 7 устанавливают первую 8 и вторую 9 пневмосистемы формирования поверхности соответственно.
Основной парус 2 выполнен кольцевой формы. Внутренний диаметр кольца равен внешнему диаметру дополнительного паруса 3. Дополнительный парус выполняет функцию компенсатора кинетического момента основного паруса. Одновременно дополнительный парус увеличивает эффективную площадь СП на  аналогично прототипу [2].
аналогично прототипу [2].
В отличие от прототипа для раскрытия основного и дополнительного парусов используются пневмосистемы формирования плоских поверхностей 8 и 9 [3].
Кроме этого, взамен двухстепенного шарнира приводом, используемом в управлении углом излома продольной оси корпуса СП в прототипе [2], в предлагаемом техническом решении используется карданный подвес 5.
Если для изменения трехосной ориентации СПК с основным парусом 2 используются гироскопические эффекты, то необходимость в первом карданном подвесе 4 отпадает.
Управлением относительной угловой скоростью ω2 вращения дополнительного паруса достигается ориентация относительно продольной оси корабля.
Ориентация относительно поперечных осей OX1 и OY1 достигается за счет процессии системы при изменении углового положения между осями O1Z1 и О2Z2 карданных подвесов в двух плоскостях управления ZO1X1 и ZO1Y1.
При вращении парусов в разные стороны система сохраняет нулевой кинетический момент при эксплуатации и удерживается конфигурация гибких поверхностей.
На фиг.2 приведена кинетическая схема размещения карданного подвеса (4 или 5) и устройства закрутки (6 или 7) пневмосистемы формирования гибких плоских поверхностей (8 или 9).
Карданные подвесы устанавливаются на цилиндрическом корпусе СПК концентрично его внешней поверхности с помощью двух стоек совмещенными с вертикальной осью его вращения (O1Y1).
Внутренняя 11 и внешняя 12 рамы карданного подвеса поворачиваются соответственно вокруг взаимоперпендикулярных осей OiYi и OiXi на углы ±αi и ±βi (i=1,2). Начало координат (O1 и O2) совмещено с продольной осью конуса СПК. Кроме того, плоскость X1O1Z1 совмещена с плоскостью X2O2Z2, a плоскость Y1O1Z1 - с Y2X2Z2.
Такое совмещение систем управления карданными подвесами и размещение их относительно корпуса 1 цилиндрической формы существенно упрощает алгоритмы управления и ориентации СПК.
На конце верхней стойки 10 неподвижно установлен первый электродвигатель (ЭД1) 13. Ось вращения ротора этого двигателя совпадает с осью OiYi и связана неподвижно с внутренней рамой карданного подвеса (11 или 12). Статор второго электродвигателя (ЭД2) 14 неподвижно соединен с внутренней рамой 11 соответствующего карданного подвеса.
Ось вращения ротора этого двигателя совпадает с осью вращения OiXi внешней рамы карданного подвеса 12.
На внешней раме 12 установлен обруч 16 с возможностью свободного вращение вокруг нее. Для этой цели используется третий электродвигатель ЭД3 15. Статор этого двигателя неподвижно соединен с внутренней рамой карданного подвеса 11. При этом на валу двигателя шарнирно установлена внешняя рама карданного подвеса 12, которая свободно вращается вокруг него. На валу двигателя ЭД установлено колесо 17, которое взаимодействует с обручем и приводит его во вращение.
установлено колесо 17, которое взаимодействует с обручем и приводит его во вращение.
На обруче 16 установлена внутренняя пневмокамера 18 соответствующей пневмосистемы формирования поверхности 8 или 9. Элементы конструкции 15-17 входят в устройство для закрутки гибких поверхностей 6 или 7 (см. фиг.2 и 3).
Устройства закрутки обеспечивают вращение основной 2 и дополнительной 3 гибких поверхностей (парусов) в противоположных направлениях, компенсируя тем самым кинетические моменты друг друга.
Кроме того, вращение обруча 16 с пневмосистемой 8 или 9 за счет центробежных сил облегчает процессе раскрытия уложенных до этого гибких поверхностей и выдерживает их плоскую форму.
Конструкция устройства закрутки на фиг.3 содержит обруч 16 с концентричной круговой канавкой 19, которая пневматически соединена с внутренней полостью пневмокамеры 18. Такую же концентричную канавку имеет внешняя рама 12 карданного подвеса.
Уплотнительные прокладки 20 кольцевой формы, уложенные в двух концентричных канавках во внешней раме, обеспечивают герметичность пневмосоединения между источником сжатого газа, установленным в корпусе СПК, и пневмосистемой формирования поверхности 8 или 9. Сжатый газ поступает в канавку 19 через штуцер 21, шланг 22 и вентиль 23.
Для обеспечения герметичности уплотнения между внешней рамой карданного подвеса 12 и обручем 16 используются подшипники 24, установленные с помощью перпендикулярных креплений по периметру рамы 12 через равные дистанции.
Для закрутки обруча 16 с установленной на нем пневмосистемой формирования поверхности может быть использован второй вариант конструкции устройства закрутки, представленный на фиг.4.
Обмотка ротора 26 установлена на внешней раме карданного подвеса 12. Обмотка статора 27 размещена с внутренней стороны обруча 16. Взаимодействие электромагнитных полей этих обмоток приводит к вращению обруча и установленной на ней пневмосистемы формирования поверхности в ту или другую стороны в зависимости от полярности приложенного напряжения.
Для подачи напряжения на вращающийся обруч используются металлические диэлектрические кольца 29. Последние, в свою очередь, установлены концентрично на боковую поверхность обруча. Для подачи напряжения на обмотку статора 27 используются щетки 30 и электропровода 31.
Гибкая поверхность представляет собой диэлектрическую пленку толщиной 4÷10 мкм с алюминиевым покрытием. Такая пленка отражает до 94% падающего солнечного излучения. При отражении излучения оно оказывает на пленку давление. Сила давления солнечного излучения постоянна во времени и используется в качестве двигателя СПК.
Один гектор солнечного паруса достаточен для перемещения в космическом пространстве спутника с весом 160 кг [1].
Основные проблемы создания космического паруса: первая как сделать его легким; вторая - как управлять им в пространстве.
Предлагаемое техническое решение позволяет решить обе эти проблемы. Для раскрытия гибкой отражающей поверхности (паруса) используется пневмосистема формирования поверхности 8, 9 на фиг.5 [3].
Пневмосистема состоит из внутренней 18 и внешней 33 пневмокамер, соединенных друг с другом пневматически с помощью радиальных стоек 33.
Внутренняя пневмокамера 18 имеет форму тора - велосипедной камеры и установлена на вращающемся обруче 16.
Внешняя пневмокамера 32 и радиальные стойки 33 формируются из отдельных пневмоячеек формы тора (бублика) или шара, соединенных между собой трубкой из гибкого материала [3].
В предлагаемом техническом решении используются еще два варианта конструкции пневмосистемы (см. фиг.5-7).
Аналогично известному отражателю [3] пневмосистема при ее заполнении газом принимает форму велосипедного колеса.
С помощью растяжек 34, прикрепленных к ушкам, наращенным по бокам внутренней пневмокамеры 18, и пневмоячеек внешней камеры 32 осуществляется раскрытие гибкой поверхности (отражающей пленки).
В отличие от известного отражателя излучения [3] в данном варианте пневмосистемы пневмоячейки, формирующие радиальные стержни и внешнюю пневмокамеру, соединены друг с другом через клапана 37.
Клапана обеспечивают определенную заранее заданную последовательность заполнения пневмоячеек газом и повышают надежность работы пневмосистемы. Это связано с тем, что потеря герметичности отдельных пневмоячеек не влияет на работоспособность всей системы в целом.
Пневмосистемы формирования поверхности 8 и 9 основной 2 и дополнительной 3 гибких поверхностей имеют небольшое отличие в своей конструкции. Первая пневмосистема формирования поверхности 8 содержит в себе дополнительно среднюю пневмокамеру 33 диаметром, равным диаметру внешней пневмокамеры 32 второй пневмосистемы 9. Кроме того, во второй пневмосистеме гибкая поверхность (отражающая пленка) 2 растягивается между внутренней 18 и внешней 32 пневмокамерами.
В первой пневмосистеме отражающая пленка растягивается между средней 33 и внешней 32 пневмокамерами. При растяжении гибкая поверхность (основной парус) 2 принимает форму кольца с внутренним диаметром, равным внешнему диаметру дополнительного паруса 3.
Таким образом, суммарная площадь основного и дополнительного парусов равна  где
где
Rвн.осн. - радиус внешней пневмокамеры основного паруса.
При открытии вентиля 23 сжатый газ через шланг 22 и штуцер 21 поступает во внутреннюю пневмокамеру 18.
После его заполнения и достижения давления уровня срабатывания клапана 37 начинается процесс заполнения и раскрытия радиальных стержней 34. Процесс идет по эстафетному принципу. От первой пневмоячейки подпитывается вторая, а затем третья и т.д. После заполнения всех ячеек радиальной стойки 32 начинается процесс заполнения пневмоячеек 38 (40, 41) внешней пневмокамеры 32 дополнительного паруса 3 или средней пневмокамеры основного паруса 2. Может быть и другой вариант - одновременное заполнение средней и внешней пневмокамер. Это обеспечивается конструкцией пневмопровода, состоящей из трубок 39, ячеек 38, 40, 41 и клапанов 37.
Процесс раскрытия гибких поверхностей (парусов) может быть ускорен путем использования центробежных сил. Для этого на определенных этапах раскрытия гибких поверхностей необходимо привести в действие устройства раскрутки 6 и 7.
Центробежные силы повысят также надежность конструкций пневмосистем формирования поверхностей и улучшат коэффициент качества натяжения отражающих пленок основного и дополнительного парусов.
На фиг.6 показан участок цепи, сплетенный из пневмоячеек тороидальной формы 38. При заполнении тора и трубки 39 газом тор принимает круглую форму, а трубка - прямолинейную. Так как 1/3 часть трубки проходит по диаметру соседних пневмоячеек, торы становятся в один ряд, а трубка 39 выпрямляется. Так формируются радиальные стойки 34.
Если концы трубки соединить, как это сделано во внешней 32 и средней 33 пневмокамерах, то выпрямляющее усилие, создаваемое пневмоячейками (торами) 38, придаст пневмокамерам 32 и 33 круглую форму. Вся пневмосистема при этом примет форму велосипедного колеса.
С помощью ушек, наращенных на пневмоячейках, и растяжек раскрывают гибкую отражающую поверхность (парус) [3].
Для повышения прочности отражающая пленка может быть «армирована» радиальными и концентрированными нитками из высокопрочных материалов.
На фиг.7 представлен участок «гирлянды», состоящий из контактируемых друг другом тороидальных пневмоячеек 40, по диаметру которых проходит трубка 39. На границе раздела пневмоячеек установлены клапана 37, которые пропускают газ в одном направлении при превышении давления выше порогового уровня P1. В этом случае для выпрямления трубки 39 используется сила взаимодействия между пневмоячейками (торами) круглой формы, имеющими одну точку касания.
На фиг.8 для формирования «гирлянды» использованы пневмоячейки формы шара 41, которые через клапана 37 пневмоячейки соединены друг с другом.
Выпрямление трубки 39 происходит в результате взаимодействия шаровых пневмоячеек, имеющих одну точку касания [3].
На фиг.9 представлена конструкция первого варианта клапана 37. Клапан состоит из цилиндрической втулки 42, внутри которой установлены шарик 43 и пружина 44. Одним концом пружина опирается в шарик, другим - в заглушу 45. Отверстие в трубке с другого конца имеет меньшее сечение. Подпружинный шарик герметично закрывает отверстие в трубке. Шарик пропускает газ в соседнюю пневмоячейку только тогда, когда давление в предыдущей ячейке становится выше уровня P1. При превышении этого уровня пружина 44 сжимается и шарик пропускает газ в следующую пневмоячейку через отверстие 46 во втулке 42 и трубке 39.
Таким образом, последовательно одна за другой заполняются все пневмоячейки, формируя радиальные стойки 34, а также среднюю 33 и внешнюю 32 пневмокамеры.
На фиг.10 приведена конструкция второго варианта клапана 37. Клапан состоит также из цилиндрической (второй) втулки 49, шарика 43 и двух эластичных полосок 50, закрепленных взаимно перпендикулярно, и второй заглушки 51. Отверстие 52 в гибкой трубке совпадает с отверстием 46 клапана.
В отличие от первого варианта (фиг.9) шарик закрывает отверстие во втулке 49 за счет сил растяжения эластичных полосок 50. При повышении давления выше установленного уровня P1 эластичные полоски растягиваются, шарик отжимается и газ через отверстия 46 поступает в следующую пневмоячейку.
Таким образом, заполняется вся пневмосистема в целом.
В случае повреждения отдельных пневмоячеек система сохраняет свою форму, т.к. клапана не пропускают газ в сторону поврежденной пневмоячейки. Таким образом, повышается надежность и долговечность работы всей системы в целом.
При необходимости свертывания (сборки) пневмосистемы в конструкции клапанов могут быть внесены следующие конструктивные изменения.
По всей трубке 39, проходящей через радиальные стойки 34 и пневмокамеры 32 и 33, необходимо пропустить электрический проводник 47, соединяющий друг с другом спиральки 48. Спиральки изготавливаются из материала с высоким удельным электрическим сопротивлением (например, нихрома). Спиральки устанавливаются внутри шариков 43 (50). Шарики, в свою очередь, изготавливаются из материала, который легко расплавляется при его нагреве (например, из оргстекла). Когда система отработает свой срок, концы электропровода 47 подключаются к источнику ЭДС. Проходящий через спирали ток нагревает их. Это приводит к расплавлению шариков. При этом клапана 37 теряют свои свойства, трубка 39 становится сквозной. Отключив шланг 22 от вентиля 23 и источника сжатого газа, выпускают содержимый в пневмосистеме газ в окружающее космическое пространство. Затем, подтягивая трубку 39 с электропроводом 47, можно свернуть всю пневмосистему вместе с гибкой отражающей пленкой.
Данная конструкция СПК обладает большей надежностью, эффективностью (определяется отношением площади паруса к суммарной массе конструкции), меньшей удельной массой, что приводит к увеличению тяги СП и ускорения КА.
Источники информации
1. Полякова Е.Н. Космический полет с солнечным парусом. Наука, 1986 г., с.138-441.
2. Сыромятников B.C., Брянец В.П., Коверина И.П. Космический аппарат с солнечным парусом. RU, патент №2053940; 6 B 64 G 1/40, 10.02.96 г., Бюл. №4 (прототип).
3. Алиев А.С. Отражатель излучения. RU, патент №2185695, 20.07.2002 г., Бюл. №20.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСКРЫВАЕМЫЙ ПЛЕНОЧНЫЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2325740C2 |
| ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2185695C1 |
| ПЛЁНОЧНЫЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2002 |
|
RU2207675C1 |
| РЕГУЛИРУЕМЫЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2183890C2 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2007 |
|
RU2392487C2 |
| ВЕТРОДВИГАТЕЛЬ АЛИЕВА | 2002 |
|
RU2224135C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2004 |
|
RU2280782C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ | 2006 |
|
RU2325550C2 |







Изобретение относится к двигательным системам космических кораблей и, в частности, к конструкции солнечного паруса (СП). Предлагаемый корабль с СП содержит корпус, основную и дополнительную кольцевые отражающие поверхности, средства их формирования с устройствами закрутки и средства управления ориентацией этих поверхностей. Данные средства управления ориентацией выполнены на основе карданных подвесов, вынесенных за пределы корпуса корабля. Каждое устройство закрутки выполнено в виде обруча, установленного на внешней раме карданного подвеса с возможностью свободного вращения и взаимодействующего с электродвигателем. Средства формирования отражающих поверхностей выполнены в виде пневмосистем с концентричными пневмокамерами и радиальными стойками. Стойки содержат гибкие трубки, внутри которых эквидистантно установлены клапаны с отверстиями. На трубках наращены пневмоячейки в форме тора или шара. Каждая пневмосистема установлена на соответствующем обруче. Она сообщена через концентричную герметичную канавку, выполненную в обруче и во внешней раме карданного подвеса, с источником сжатого газа, установленным в корпусе корабля. Технический результат изобретения направлен на уменьшение инерционности управления СП, возможность развертывания СП по заданной программе, а также на снижение массы СП на единицу его поверхности. 3 з.п. ф-лы, 11 ил.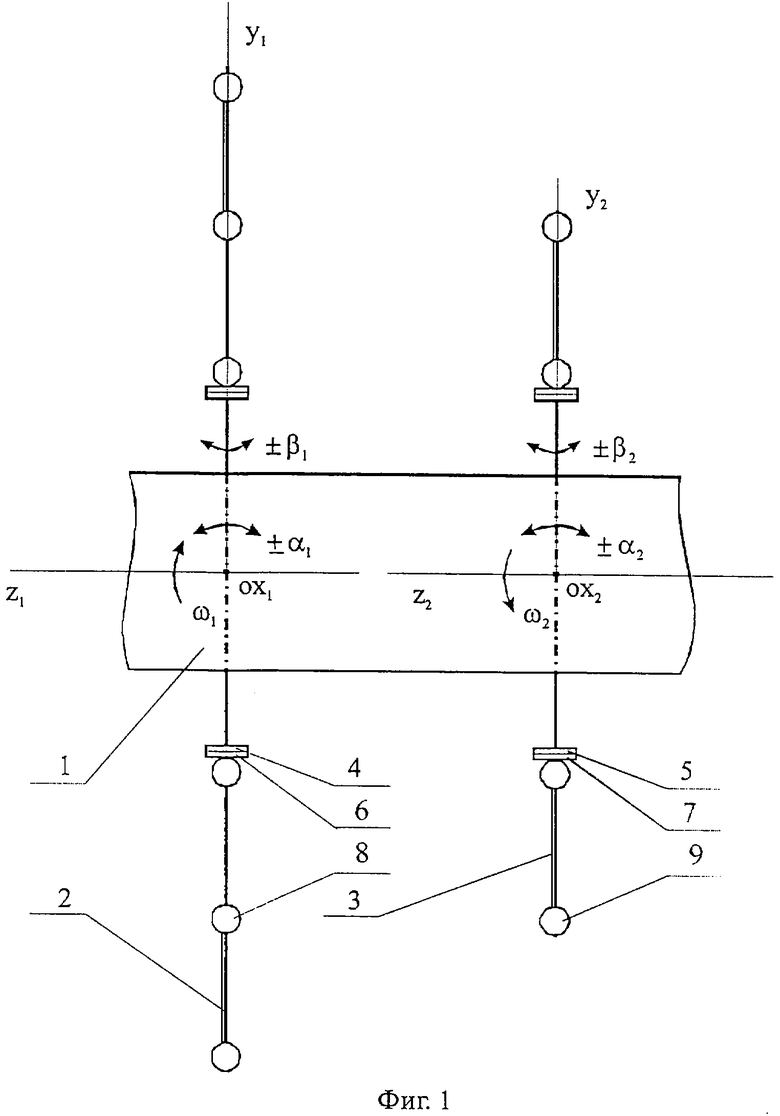
| RU 2053940 С1, 10.02.1996 | |||
| ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2185695C1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| US 6194790 А, 27.02.2001. | |||

