Изобретение относится к области навигационных приборов, позволяющих осуществлять пространственную ориентацию оператора либо иного подвижного объекта при его перемещении по Земной либо иной поверхности, характеризующейся наличием горизонтального магнитного поля.
Известно "Устройство для записи конфигурации земельных участков" (1), содержащее гироскоп, датчик пути, синусно-косинусное устройство, два арифметических устройства, блок выделения дискрет угла и перфоратор. В силу своего назначения и схемы построения это устройство имеет ограниченные функциональные возможности.
За прототип изобретения принято "Навигационное устройство" (2), основными составными частями которого являются датчик угловой ориентации, датчик перемещения, блок ввода начальных данных, вычислитель текущих координат, вычислитель азимут-дальность, устройство управления, коммутатор и блок индикации.
Сущность устройства-прототипа состоит в следующем. Имея в качестве исходных данных координаты начальной и заданной (конечной) точек, вычисляются значения "азимут-дальность" в направлении на заданную точку, после чего следует прямолинейное движение оператора из начальной точки в этом направлении. Навигационное устройство, находясь при движущемся операторе, фиксирует действительный магнитный азимут движения и время его движения до остановки. На остановке, в предположении, что скорость движения была строго определенной и постоянной, автоматически вычисляются величина пройденного расстояния и координаты точки остановки, а также откорректированные азимут на заданную точку и расстояние до нее. Затем выполняется следующий этап движения, по окончании которого вновь уточняются азимут и расстояние до заданной точки, и т. д. , пока оператор не достигнет ее. Таким образом, осуществляя корректировку азимута на конечную точку при периодических остановках в процессе прямолинейного движения, устройство-прототип обеспечивает выход оператора в заданную точку по наиболее прямому пути.
Из изложенного описания виден основной недостаток устройства-прототипа - ограниченность его функциональных возможностей, поскольку оно осуществляет только корректировку азимута и расстояния до заданной точки при движении оператора к цели строгонаправленными прямолинейными отрезками с постоянной скоростью.
В то же время на практике часто возникает необходимость:
отслеживания, запоминания и индикации изображения как угодно сложной трассы перемещения оператора на местности как с постоянной, так и с переменной скоростью движения;
определения в любой точке пути величины угла магнитного азимута и расстояния как до конечной, так и до начальной точек;
фиксирования для последующей индикации на изображении трассы пройденного пути контрольных точек, прохождение которых совпало с определенными моментами времени, либо обозначаемых во время движения оператором;
"подкраски" для последующей индикации отличительных особенностей различных отрезков пути, таких, например, как спуск, подъем, классификации покрытия - бетонное либо асфальтированное шоссе, каменная мостовая, грунтовая дорога, тропинка и т.п.;
индикации наложения изображения трассы совершаемого перемещения на изображение трассы ранее пройденного соответствующего пути;
выдачи информации о пройденном пути и расчетных данных на различные внешние устройства - всевозможные устройства отображения, документирования, радиопередающие устройства и т.п.
Целью данного изобретения является увеличение функциональных возможностей навигационного устройства, заключающееся в обеспечении: определения и индикации текущих координат точки нахождения оператора в процессе его перемещения на местности; определения и индикации в любой точке пути угла магнитного азимута (направления) и расстояния как до конечной, так и до начальной точек; индикации трассы пройденного пути с указанием на ней контрольных точек прохождения, определяемых как определенными моментами времени их прохождения, так и задаваемых оператором; "подкраски" для последующей индикации отличительных особенностей различных отрезков пути; индикации наложения изображения трассы совершаемого перемещения на изображение трассы ранее пройденного соответствующего пути; выдачи информации о пройденном пути и расчетных данных на различные внешние устройства.
Указанная цель в заявляемом устройстве достигается благодаря дополнительному введению в его состав по сравнению с прототипом блока выявления изменений угловой ориентации, вычислителя параметров прямолинейных отрезков пути, вычислителя цикловых изменений координат, вычислителя изменения текущих координат, блока памяти циклов перемещения, датчика меток времени, датчика контрольных точек и элемента ИЛИ, при соответствующих схемах их внутреннего построения, схеме соединения их между собой и с другими составными частями устройства.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием дополнительных элементов при соответствующем схемном решении. Таким образом, заявляемое устройство соответствует критерию изобретению "новизна".
Сравнение заявляемого устройства с другими аналогичными техническими решениями показывает, что наличие в подобных устройствах датчика угловой ориентации, датчика перемещений, блока ввода исходных данных, вычислителя текущих координат, вычислителя азимут-дальность, блока управления, коммутатора и блока индикации известно. Однако благодаря дополнительному введению в состав навигационного устройства блока выявления изменений угловой ориентации, вычислителя параметров прямолинейных отрезков пути, вычислителя цикловых изменений координат, вычислителя изменения текущих координат, блока памяти циклов перемещения, датчика меток времени, датчика контрольных точек и элемента ИЛИ появляются новые свойства заявляемого устройства, проявляющиеся в существенном увеличении его функциональных возможностей, а следовательно, и в значительном расширении области его применения. Это позволяет сделать вывод о соответствии заявляемого технического решения критерию "существенные отличия".
На чертеже представлена структурная схема предлагаемого навигационного устройства, на которой обозначены:
1 - датчик угловой ориентации;
2 - датчик перемещений;
3 - блок выявления изменений угловой ориентации;
4 - вычислитель параметров прямолинейных отрезков пути;
5 - вычислитель цикловых изменений координат;
6 - вычислитель изменения текущих координат;
7 - вычислитель текущих координат;
8 - вычислитель азимут-дальность;
9 - блок ввода исходных данных;
10 - блок памяти циклов перемещения;
11 - датчик меток времени;
12 - датчик контрольных точек;
13 - коммутатор;
14 - блок управления;
15 - блок индикации;
16 - элемент ИЛИ.
Составные части навигационного устройства содержат в своем составе следующие элементы:
17 - первый ключ;
18 - первый элемент памяти;
19 - первый вычитатель;
20 - формирователь одиночных импульсов;
21 - второй ключ;
22 - второй элемент памяти;
23 - счетчик единичных импульсов;
24 - синус-косинусный датчик;
25 - первый умножитель;
26 - второй умножитель;
27 - первый накопитель;
28 - второй накопитель;
29 - первый сумматор;
30 - второй сумматор;
31 - первый определитель угла магнитного азимута;
32 - первый определитель удаленности;
33 - второй вычитатель;
34 - третий вычитатель;
35 - второй определитель угла магнитного азимута;
36 - второй определитель удаленности.
Используемые элементы и составные части характеризуются следующими структурными особенностями и функциональными возможностями.
Датчик 1 угловой ориентации имеет один выход. Его назначением являются постоянное отслеживание величины угла магнитного азимута расположения корпуса навигационного устройства на Земной поверхности и выдача на выход сигнала, содержащего информацию о величине этого угла.
Датчик 2 перемещений имеет один выход. Его назначением является выдача на выход электрических импульсов, появляющихся по мере перемещения навигационного устройства в прямом направлении на единицу длины, например, на один шаг, на один метр, и т.п.
Блок 3 выявления изменений угловой ориентации имеет один вход и один выход и содержит в своем составе первый ключ 17, первый элемент 18 памяти, первый вычитатель 19 и формирователь 20 одиночных импульсов.
Первый ключ 17 имеет два входа и один выход. Постоянно поступающий на его первый вход электрический сигнал кратковременно появляется на выходе только в момент поступления на второй вход управляющего импульса.
Первый элемент 18 памяти имеет один вход и один выход. Информация, поступающая на его вход в виде кратковременного электрического сигнала, запоминается в нем и выдается на выход все время, пока на его вход не поступит следующий сигнал, заменяющий собой предыдущий.
Первый вычитатель 19 имеет два входа и один выход. Он осуществляет вычитание друг из друга сигналов, поступающих на его входы, и выдачу их разницы на выход.
Формирователь 20 одиночных импульсов имеет один вход и один выход. При превышении величины входного сигнала определенного значения на его выходе появляется одиночный импульс.
Элементы, образующие блок 3 выявления изменений угловой ориентации, соединены между собой следующим образом. Первый вход первого ключа 17, являясь входом блока 3 выявления изменений угловой ориентации, соединен со вторым входом первого вычитателя 19. Выход первого ключа 17 соединен со входом первого элемента 18 памяти, выход которого соединен с первым входом первого вычитателя 19, выход которого соединен со входом формирователя 20 одиночных импульсов, выход которого, являясь выходом блока 3 выявления изменений угловой ориентации, соединен со вторым входом первого ключа 17.
Вычислитель 4 параметров прямолинейных отрезков пути, имея три входа и два выхода, содержит в своем составе второй ключ 21, второй элемент 22 памяти и счетчик 23 единичных импульсов.
Второй ключ 21 имеет два входа и один выход. Поступающая на его первый вход информация в виде определенного электрического сигнала кратковременно появляется на его выходе только в момент поступления на его второй вход управляющего импульса.
Второй элемент 22 памяти имеет два входа и один выход. Информация, поступающая на него по первому входу в виде кратковременного электрического сигнала, запоминается и хранится до момента поступления управляющего импульса по второму входу, в этот момент хранимая информация считывается и поступает на выход, а информация, поступающая по первому входу, запоминается.
Счетчик 23 единичных импульсов имеет два входа и один выход. В промежутках между моментами поступления на его второй вход управляющих импульсов он осуществляет подсчет количества импульсов, поступающих по первому входу. При каждом очередном поступлении на его второй вход управляющего импульса происходят выдача на выход сигнала, содержащего информацию о количестве поступивших в течение последнего цикла импульсов, обнуление счетчика и начало подсчета количества импульсов очередного цикла.
Элементы, образующие вычислитель 4 параметров прямолинейных отрезков пути, соединены между собой следующим образом. Первый вход вычислителя 4 параметров прямолинейных отрезков пути является первым входом второго ключа 21, второй вход - первым входом счетчика 23 единичных импульсов, а третий вход - соединенными между собой вторыми входами второго ключа 21, второго элемента 22 памяти и счетчика 23 единичных импульсов. Выход второго ключа 21 соединен с первым входом второго элемента 22 памяти. Выходы второго элемента 22 памяти и счетчика 23 единичных импульсов являются соответственно первым и вторым выходами вычислителя 4 параметров прямолинейных отрезков пути.
Вычислитель 5 цикловых изменений координат имеет два входа и один выход и содержит в своем составе синус-косинусный датчик 24, первый умножитель 25 и второй умножитель 26.
Синус-косинусный датчик 24 имеет один вход и два выхода. На основании информации о величине угла, поступающей на его вход в виде определенного кратковременного электрического сигнала, синус-косинусный датчик 24 выдает по первому выходу величину косинуса, а по второму выходу - величину синуса этого угла.
Первый 25 и второй 26 умножители имеют по два входа и одному выходу. Каждый из умножителей (25 и 26) осуществляет перемножение величин, выражаемых сигналами, поступающими по их двум входам, и выдачу полученного произведения на выход.
Элементы, образующие вычислитель 5 цикловых изменений координат, соединены между собой следующим образом. Первый вход вычислителя 5 цикловых изменений координат является входом синус-косинусного датчик 24, а второй вход - соединенными между собой вторыми входами первого 25 и второго 26 умножителей. Первый выход синус-косинусного датчика 24 соединен с первым входом первого умножителя 25, а второй выход - с первым входом второго умножителя 26. Объединенные между собой выходы первого 25 и второго 26 умножителей являются выходом вычислителя 5 цикловых изменений координат.
Вычислитель 6 изменения текущих координат имеет один вход и один выход и содержит в своем составе первый накопитель 27 и второй накопитель 28. Каждый из накопителей 27 и 28 имеет по одному входу и одному выходу, и функциональной задачей каждого из них является, начиная с момента обнуления (обнуляющие входы на фиг. 1 не показаны), суммирование величин, выражаемых поступающими на их входы в произвольные моменты времени сигналами, и выдача полученной величины суммы на выход.
Вход вычислителя 6 изменения текущих координат представляет собой объединение двух сигналов, первый из которых поступает на вход первого накопителя 27, а второй - на вход второго накопителя 28. Объединение выходов первого 27 и второго 28 накопителей представляет собой выход вычислителя 6 изменения текущих координат.
Вычислитель 7 текущих координат имеет два входа и один выход и содержит в своем составе первый сумматор 29 и второй сумматор 30. Каждый из сумматоров 29 и 30 имеет по два входа и одному выходу. Функциональной задачей каждого сумматора является суммирование величин, выражаемых сигналами, поступившими в начальный момент времени на их первые входы, с сигналами, поступающими в производные моменты времени на их вторые входы, и выдача полученной величины суммы на выход.
Первый вход вычислителя 7 текущих координат представляет собой объединение двух сигналов, первый из которых поступает на первый вход первого сумматора 29, а второй - на первый вход второго сумматора 30.
Второй вход вычислителя 7 текущих координат представляет собой также объединение двух сигналов, первый из которых поступает на второй вход первого сумматора 29, а второй - на второй вход второго сумматора 30.
Объединенные выходы первого 29 и второго 30 сумматоров представляют собой выход вычислителя 7 текущих координат.
Вычислитель 8 азимут-дальность имеет три входа и два выхода и содержит в своем составе первый определитель 31 угла магнитного азимута, первый определитель 32 удаленности, второй вычитатель 33, третий вычитатель 34, второй определитель 35 угла магнитного азимута и второй определитель 33 удаленности.
Каждый из вычитателей 33 и 34 имеет по два входа и одному выходу. Их задачей является вычитание из величины сигнала, поступающего по первому входу, величины сигнала, поступающего по второму входу, и выдача их разницы на выход.
Каждый из определителей 31 и 35 угла магнитного азимута имеет по два входа и одному выходу. Их функциональной задачей является вычисление величины угла α магнитного азимута согласно выражению
где x - значение сигнала, поступившего по первому входу;
y - значение сигнала, поступившего по второму входу;
φ - слагаемое, учитывающее направленность вычисляемого угла магнитного азимута и составляющее для первого определителя 31 магнитного азимута величину φ1 = -180o, а для второго определителя 35 магнитного азимута φ2 = 0o,
и выдача полученного значения α на выход.
Каждый из определителей удаленности 32 и 36 имеет по два входа и одному выходу. Их задачей является вычисление расстояния L между двумя точками на плоскости согласно выражению:
где x - значение сигнала, поступившего по первому входу;
y - значение сигнала, поступившего по второму входу,
и выдача полученного значения L на выход.
Элементы, образующие вычислитель 8 азимут-дальность, соединены между собой следующим образом.
Первый вход вычислителя 8 азимут-дальность представляет собой объединение двух сигналов, первый из которых поступает на первый вход второго вычитателя 33, а второй - на первый вход третьего вычитателя 34.
Второй вход вычислителя 8 азимут-дальность представляет собой объединение двух сигналов, первый из которых поступает на соединенные между собой первые входы первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности, а второй - на соединенные между собой вторые входы первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности. Объединение выходов первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности является первым выходом вычислителя 8 азимут-дальность.
Третий вход вычислителя 8 азимут-дальность представляет собой объединение двух сигналов, первый из которых поступает на второй вход второго вычитателя 33, а второй - на второй вход третьего вычитателя 34.
Выход второго вычитателя 33 соединен с соединенными между собой первыми входами второго определителя 35 угла магнитного азимута и второго определителя 36 удаленности.
Выход третьего вычитателя 34 соединен с соединенными между собой вторыми входами второго определителя 35 угла магнитного азимута и второго определителя 36 удаленности.
Объединение между собой выходов второго определителя 35 угла магнитного азимута и второго определителя 36 удаленности является вторым выходом вычислителя 8 азимут-дальность.
Блок 9 ввода исходных данных имеет два выхода, первый из которых предназначен для выдачи координат начальной точки, а второй - координат конечной точки движения.
Блок памяти 10 имеет четыре входа и один выход. Первый вход предназначен для приема значений циклового изменения координат, второй - меток времени, третий - указаний на прохождение контрольных точек по маршруту движения, а четвертый - указаний о начале и окончании отрезков пути, характеризующихся определенными отличительными особенностями.
Датчик 11 меток времени имеет один выход. Его назначением является выдача на выход электрических сигналов через определенные промежутки времени, устанавливаемые оператором.
Датчик 12 контрольных точек имеет один выход. Его назначением является выдача на выход электрических сигналов по командам оператора, например, при нажатии им определенной кнопки.
Коммутатор 13 имеет четыре информационных входа, один управляющий вход и два выхода. Его задачей является соединение согласно командам управления, поступающим по управляющему входу, указанного информационного входа с указанным выходом.
Блок 14 управления имеет два выхода. Его назначением является формирование и выдача по первому выходу задаваемых оператором сигналов управления коммутатором на выполнение той или иной коммутации, а по второму выходу - сигналов о начале и окончании отрезков пути, характеризующихся определенными особенностями, и классификация этих особенностей.
Блок 15 индикации имеет один вход. Он предназначен для осуществления наглядного отображения информации, поступающей на его вход в виде определенных электрических сигналов.
Составные части, образующие предлагаемое навигационное устройство, соединены между собой следующим образом.
Выход датчика 1 угловой ориентации соединен со входом блока 3 выявления изменений угловой ориентации и с первым входом вычислителя 4 параметров прямолинейных отрезков пути, второй вход которого соединен с выходом датчика 2 перемещений.
Выход блока 3 выявления изменений угловой ориентации соединен с первым входом элемента ИЛИ 16, выход которого соединен с третьим входом вычислителя 4 параметров прямолинейных отрезков пути.
Первый и второй выходы вычислителя 4 параметров прямолинейных отрезков пути соединены соответственно с первым и вторым входами вычислителя 5 цикловых изменений координат.
Вход вычислителя 5 цикловых изменений координат соединен со входом вычислителя 6 изменения текущих координат и с первым входом блока памяти 10 циклов перемещения.
Выход вычислителя 6 изменения текущих координат соединен со вторым входом вычислителя 7 текущих координат и со вторым входом вычислителя 8 азимут-дальность.
Выход вычислителя 7 текущих координат соединен с третьим входом вычислителя 8 азимут-дальность и с третьим входом коммутатора 13.
Первый и второй выходы вычислителя 8 азимут-дальность соединены соответственно с первым и вторым входами коммутатора 13.
Первый и второй выходы 9 ввода исходных данных соединены соответственно с первым входом вычислителя 7 текущих координат и с первым входом вычислителя 8 азимут-дальность.
Выход блока 10 памяти циклов перемещения соединен с четвертым входом коммутатора 13.
Выход датчика 11 меток времени, выход датчика 12 контрольных точек и второй выход блока 14 управления соединены соответственно со вторыми, третьими и четвертыми входами блока 10 памяти циклов перемещения и элемента ИЛИ 16.
Первый выход блока управления 14 соединен с управляющим входом коммутатора 13.
Первый выход коммутатора 13 соединен со входом блока индикации 15.
Второй выход 37 коммутатора 13 предназначен для подключения к нему внешних устройств.
Работает навигационное устройство следующим образом.
Перед началом его использования по команде, вводимой оператором, обнуляются счетчик 23 единичных импульсов, все накопители 27 и 28, сумматоры 29 и 30 и элементы памяти 18 и 22 устройства (цепи передачи сигналов обнуления на чертеже не показаны). При этом автоматически происходит следующее.
В момент времени, непосредственно следующий за обнулением наряду с другими и первого элемента 18 памяти блока 3 выявления изменений угловой ориентации, сигнал с выхода датчика 1 угловой ориентации, содержащий информацию о величине угла магнитного азимута направления расположения корпуса навигационного устройства, поступая на второй вход первого вычитателя 19, проходит через него без изменений и поступает на вход формирователя 20 одиночных импульсов, вызывая тем самым его срабатывание. Импульсный сигнал, сформированный формирователем 20 одиночных импульсов, поступает на второй вход первого ключа 17, а с выхода блока 3 выявления изменения угловой ориентации, пройдя через элемент ИЛИ 16, поступает через третий вход вычислителя 4 параметров прямолинейных отрезков пути на вторые входы его второго ключа 21, второго элемента 22 памяти и счетчика 23 единичных импульсов.
В результате происходит следующее.
Первый ключ 17 кратковременно открывается и пропускает постоянно поступающий на его первый вход сигнал с выхода датчика 1 угловой ориентации на вход первого элемента 18 памяти, где этот сигнал запоминается и начинает постоянно поступать на первый вход первого вычитателя 19. Сигналы, поступающие на оба входа первого вычитателя 19, оказываются одинаковыми, и выходной сигнал на его выходе, а следовательно, и сигналы на входе и выходе формирователя 20 одиночных импульсов, становятся равными нулю.
Импульсным сигналом, поступившим на второй вход второго ключа 21, осуществляется его кратковременное открытие и пропускание сигнала с выхода датчика 1 угловой ориентации на первый вход второго элемента 22 памяти.
Импульсным сигналом, поступившим на второй вход второго элемента 22 памяти, осуществляется подтверждение его обнуления и запись с последующим хранением сигнала, поступившего в этот момент времени по первому входу см выхода второго ключа 21.
Импульсным сигналом, поступившим на второй вход счетчика 23 одиночных импульсов, осуществляется подтверждение его обнуления и перевод в положение готовности к приему поступления импульсных посылок с подсчетом их количества.
Поскольку на обоих выходах вычислителя 4 параметров прямолинейных отрезков пути появились нулевые сигналы, никаких изменений в состоянии последующих составных частей устройства не произошло.
Затем по команде оператора с помощью блока 9 ввода исходных данных посредством его первого выхода записываются в первый 29 и второй 30 сумматоры через их первые входы значения координат начальной точки движения соответственно X0 и Y0, а посредством второго выхода через первые входы второго 33 и третьего 34 вычитателей - соответственно координаты Xк и Yк конечной точки.
В случае, если оператор, а вместе с ним и навигационное устройство, совершит поворот в какую-либо сторону, не сходя с места, то изменившийся сигнал с выхода датчика 1 угловой ориентации, поступив через вход блока 3 выявления изменения угловой ориентации на второй вход первого вычитателя 19, в сочетании с поступлением на первый вход первого вычитателя 19 с выхода первого элемента 18 памяти сигнала, содержащего информацию о величине прежнего угла магнитного азимута, а следовательно, и отличающегося от сигнала, поступающего по второму входу, обусловит появление выходного сигнала на выходе первого вычитателя 19, который, поступая на вход формирователя 20 одиночных импульсов, вызовет его срабатывание.
Выходной импульс с выхода формирователя 20 одиночных импульсов, аналогично описанному выше, поступает на второй вход первого ключа 17, благодаря чему в первый элемент памяти 18 запишется сигнал с информацией о новой величине угла магнитного азимута и сигнал на выходе первого вычитателя 19 вновь станет нулевым, а также на вторые входы второго ключа 21, второго элемента 22 памяти и счетчика 23 одиночных импульсов вычислителя 4 параметров прямолинейных отрезов пути, в результате чего во втором элементе 22 памяти запишется величина нового угла магнитного азимута.
Сигнал, содержащий информацию о величине старого угла магнитного азимута, поступивший при этом с выхода второго элемента 22 памяти на первый вход вычислителя 5 цикловых изменений координат, также не вызовет никаких изменений в состоянии последующих составных частей устройства, поскольку сигнал со второго выхода вычислителя 4 параметров прямолинейных отрезков, а именно с выхода счетчика 23 одиночных импульсов, при этом будет нулевым.
В случае, если оператор начнет движение, с выхода датчика 2 перемещений начнут поступать импульсы, частота появления которых прямо пропорциональна скорости перемещения. Эти импульсы поступают на первый вход счетчика 23 единичных импульсов, где будет осуществляться подсчет их количества, представляющего собой величину протяженности пройденного пути.
Такое состояние будет сохраняться до первого (очередного) изменения направления движения.
В точке изменения направления движения согласно описанному выше алгоритму работы блока 3 выявления изменений угловой ориентации его выходной сигнал, поступив по третьему входу на вычислитель 4 параметров прямолинейных отрезков пути, осуществит считывание со второго элемента 22 памяти значения величины угла магнитного азимута пройденного прямолинейного отрезка пути, а с выхода счетчика 23 единичных импульсов - величину его протяженности и поступление этих величин соответственно по первому и второму входам на вычислитель 5 цикловых изменений координат. Блок 3 выявления изменений угловой ориентации и вычислитель 4 параметров прямолинейных отрезков пути продолжают свою работу при новом значении угла магнитного азимута, т.е. в блоке 3 будет отслеживаться последующее изменение угла магнитного азимута направления движения, а в вычислителе 4 параметров прямолинейных отрезков пути будет вестись подсчет количества импульсов, соответствующего протяженности прямолинейного движения при хранимой во втором элементе 22 памяти величине текущего угла магнитного азимута.
Сигналы с первого и второго выходов вычислителя 4 параметров прямолинейных отрезков пути поступают соответственно по первому входу вычислителя 5 цикловых изменений координат на вход его синус-косинусного датчика 24, а по второму входу - на вторые входы первого 25 и второго 26 умножителей.
В результате поступления входного сигнала на синус-косинусный датчик 24 на его первом выходе появится сигнал, представляющий собой величину косинуса угла магнитного азимута (cos α), - этот сигнал поступает на первый вход первого умножителя 25; на втором выходе синус-косинусного датчика 24 появится сигнал, представляющий собой величину синуса угла магнитного азимута (sin α), - этот сигнал поступает на первый вход второго умножителя 26.
В результате перемножения сигналов, поступающих по первым и вторым входам первого 25 и второго 26 умножителей, на выходе первого умножителя 25 появится сигнал, представляющий собой величину перемещения оператора на данном прямолинейном отрезке по оси X, т.е. Δxi, а на выходе второго умножителя 26 - величину перемещения оператора по оси Y, т.е. Δyi прямоугольной системы координат Гаусса-Крюгера на плоскости, где i - порядковый номер прямолинейного отрезка пути.
С выхода вычислителя 5 циклового изменения координат, представляющего собой объединение выходов первого 25 и второго 26 умножителей, значения изменения координат в i-м цикле, т.е. Δxi и Δyi, поступают по первому входу на блок 10 памяти циклов перемещения, где запоминаются для последующего использования, и по входу вычислителя 6 изменения текущих координат соответственно на входы первого 27 и второго 28 накопителей.
В каждом из накопителей 27 и 28 происходит суммирование поступающих значений цикловых приращений Δxi и Δyi соответственно с суммой соответствующих приращений предыдущих циклов, результатом чего является получение значений изменения координат по осям X и Y нахождения оператора по окончании очередного цикла прямолинейного отрезка пути в процессе его перемещения, т. е.
Под циклами прямолинейного движения здесь понимаются прямолинейные отрезки пути в общем случае криволинейного движения оператора, начало и конец которых определяются следующими друг за другом соседними выходными импульсами блока 3 выявления изменений угловой ориентации.
Поскольку перемещение оператора относительно начальной точки возможно в любом направлении и на любое расстояние, то как цикловые изменения координат, так и результирующие значения координат точки его нахождения могут принимать как положительные, так и отрицательные значения.
Результирующие значения изменений координат (ΔX и ΔY) точки нахождения оператора относительно начальной точки движения по окончании каждого очередного цикла прямолинейного движения с выходов обоих накопителей 27 и 28, объединившись, они представляют собой выход вычислителя 6 изменения текущих координат, поступают на вторые входы вычислителя 7 текущих координат и вычислителя 8 азимут-дальность; при этом значение величины ΔX с выхода первого накопителя 27 поступает на второй вход первого сумматора 29 и на соединенные между собой первые входы первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности, а значение величины ΔY с выхода второго накопителя 28 поступает на второй вход второго сумматора 30 и на соединенные между собой вторые входы первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности соответственно вычислителя 7 текущих координат и вычислителя 8 азимут-дальность.
В первом 29 и втором 30 сумматорах вычислителя 7 текущих координат происходит суммирование значений изменения текущих координат (соответственно ΔX и ΔY) со значениями координат начальной точки (X0 и Y0), введенных в них из блока 9 ввода исходных данных на подготовительном этапе.
Результирующие значения координат (X и Y) точки нахождения оператора на момент окончания прохождения очередного прямолинейного отрезка пути с выхода вычислителя 7 текущих координат, представляющего собой объединение выходов первого 29 и второго 30 сумматоров, поступают на третий вход коммутатора 13 и на третий вход вычислителя 8 азимут-дальность, где значение величины X с выхода первого сумматора 29 поступает на второй вход второго вычитателя 33, а значение величины Y с выхода второго сумматора 30 поступает на второй вход третьего вычитателя 34.
В результате поступления с выхода первого накопителя 27 на первые входы первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности величины изменения текущего значения ΔX, а с выхода второго накопителя 28 на вторые их входы величины изменения текущего значения ΔY, и выполнения в них действий согласно выражениям (1) и (2) на выходе первого определителя 31 угла магнитного азимута появляется сигнал, представляющий собой значение угла магнитного азимута на начальную точку движения, а на выходе первого определителя 32 удаленности - сигнал, представляющий собой величину расстояния по прямой линии до начальной точки. Объединенные между собой выходы первого определителя 31 угла магнитного азимута и первого определителя 32 удаленности представляют собой первый выход вычислителя 8 азимут-дальность. По этому выходу значение угла магнитного азимута направления на начальную точку и значение кратчайшего расстояния до начальной точки поступают на коммутатор 13 по его первому входу.
Во втором 33 и третьем 34 вычитателях вычислителя 8 азимут-дальность в результате вычитания друг из друга значений координат X и Y точки нахождения оператора, поступивших из вычислителя 7 текущих координат, и координат конечной точки (Xк и Yк), введенных на подготовительном этапе из блока 9 ввода исходных данных, определяются расстояния соответственно по осям X и Y между точкой нахождения оператора и конечной точкой. Значение расстояния Lx по оси X с выхода второго вычитателя 33 поступает на первые входы второго определителя 35 угла магнитного азимута и второго определителя 36 удаленности, а значение расстояния Ly по оси Y с выхода третьего вычитателя 34 поступает на вторые входы второго определителя 35 угла магнитного азимута и второго определителя 36 удаленности.
В результате выполнения действий согласно выражениям (1) и (2) на выходах второго определителя 35 угла магнитного азимута и второго определителя 36 удаленности появляются сигналы, представляющие собой соответственно значение угла магнитного азимута на конечную точку и величину расстояния до нее по прямой линии. Эти значения, объединившись друг с другом во втором выходе вычислителя 8 азимут-дальность, поступают на коммутатор 13 по его второму входу.
Как было отмечено выше, значения изменения координат точки нахождения оператора по окончании прохождения каждого прямолинейного отрезка пути, поступающие с выхода вычислителя 5 циклового изменения координат на блок 10 памяти циклов перемещения по его первому входу, запоминаются в нем и находятся в постоянной готовности для передачи через его выход на четвертый вход коммутатора 13.
В случае, если оператором была установлена периодичность выдачи выходных импульсов датчиком 11 меток времени, то эти импульсы, поступая по второму входу на элемент ИЛИ 16 и далее на третий вход вычислителя 4 параметров прямолинейных отрезков пути, будут вызывать выполнение описанных выше действий, как и при срабатывании блока 3 выявления изменений угловой ориентации, а также поступать по второму входу в блок 10 памяти циклов перемещения и запоминаться там, накладываясь на запись информации, поступающей из вычислителя 5 циклового изменения координат.
Аналогичные действия будут происходить и при поступлении сигналов из датчика 12 контрольных точек и второго выхода блока 14 управления, инициируемых оператором в процессе его перемещения.
Вместе с тем, оператор, находясь в любой точке своего маршрута, с помощью блока 14 управления может послать в коммутатор 13 соответствующую команду на соединение с любым из его выходов, т.е. со входом блока 15 индикации либо со входом внешнего устройства, первого, второго, третьего или четвертого входа коммутатора 13.
В случае подключения ко входу блока индикации 15 первого выхода вычислителя 8 азимут-дальность на экране блока 15 индикации будет высвечена информация о нахождении оператора относительно начальной точки движения - величина угла магнитного азимута - либо указано направление на нее, и протяженность кратчайшего пути до нее по прямой линии.
В случае подключения ко входу блока индикации 15 второго выхода вычислителя 8 азимут-дальность на экране блока 15 индикации будет высвечена информация о нахождении оператора относительно конечной точки движения - величина угла магнитного азимута - либо указано направление на нее, и протяженность кратчайшего пути до нее по прямой линии.
В случае подключения ко входу блока индикации 15 выхода вычислителя 7 текущих координат на экране блока 15 индикации будут высвечены координаты точки нахождения оператора в используемой системе координат.
В случае подключения ко входу блока индикации 15 выхода блока 10 памяти циклов перемещения на экране блока 15 индикации будет высвечена трасса пройденного пути с указанием на ней меток времени и точек маршрута, в которых навигационное устройство находилось в те моменты времени, а также контрольных точек и особенностей отдельных участков пути, обозначенных оператором в процессе перемещения по маршруту. Если же предварительно вывести из блока памяти 10 циклов перемещения на экран блока индикации 15 изображение трассы ранее пройденного соответствующего пути, то изображение трассы совершаемого перемещения окажется наложенным на него.
При подключении ко второму выходу 37 коммутатора 13 соответствующего внешнего устройства, каковым может быть документирующее, запоминающее либо радиопередающее устройство, все перечисленные сведения могут быть переданы на него.
Из изложенного алгоритма работы видно, что заявленное навигационное устройство обеспечивает:
отслеживание, запоминание и индикацию изображения как угодно сложной трассы перемещения оператора на местности с различной скоростью на различных участках пути;
определение с возможностью индикации в любой точке пути величины угла магнитного азимута и расстояния как до конечной, так и до начальной точек;
фиксирование с последующей индикацией на изображении трассы пройденного пути контрольных точек, прохождение которых совпало с определенными моментами времени, либо обозначаемых во время движения оператором, а также особенностей различных участков пути;
индикации наложения изображения трассы совершаемого перемещения на изображение трассы ранее пройденного соответствующего пути;
выдачу информации о пройденном пути и расчетных данных на различные внешние устройства.
Следовательно, можно сделать вывод, что цель, поставленная перед предлагаемым изобретением, - увеличение функциональных возможностей навигационного устройства, заключающееся в обеспечении определения и индикации текущих координат точки нахождения оператора в процессе его перемещения на местности, определения и индикации в любой точке пути угла магнитного азимута (направления) и расстояния как до конечной, так и до начальной точек, индикации трассы пройденного пути с указанием на ней контрольных точек прохождения и особенностей различных участков пути, определяемых как определенными моментами времени их прохождения, так и задаваемых оператором, индикации наложения изображения трассы совершаемого перемещения на изобретение трассы ранее пройденного соответствующего пути, выдачи информации о пройденном пути и расчетных данных на различные внешние устройства - достигнута.
Предложенное устройство может найти применение во многих областях жизни и деятельности человека, связанных с перемещением его либо подвижных объектов на местности - в силовых министерствах и ведомствах, в милиции, в спецслужбах, у геологов, туристов и т.п., т.е. везде, где возникает задача оперативного определения точки нахождения перемещающегося объекта на местности относительно начальной или конечной точек маршрута, а также фиксирования с последующим отображением маршрута его перемещения. Данное устройство может быть выполнено в виде нескольких вариантов, носимым - в этом случае в качестве основы датчика перемещений может использоваться шагометр, возимым - в этом случае датчик перемещений будет получать первичную информацию от ходового механизма соответствующего подвижного объекта, и т.п.
Технико-экономический эффект, обусловленный применением предложенного устройства, заключается в повышении оперативности получения информации о координатах точки нахождения подвижного объекта (оператора) на местности либо о трассе его перемещения при сравнительно небольших материальных затратах разработки и серийного производства навигационного устройства.
Количественная величина ожидаемого технико-экономического эффекта от использования предложенного устройства зависит в первую очередь от варианта его конкретного исполнения и области применения; ее определение возможно только после создания и применения предложенного устройства на конкретных объектах.
Источники информации:
1. А.с. СССР N 708148, МКИ G 01 C 21/00, 1980, БИ N 3.
2. Патент РФ N 2058532, МКИ G 01 C 21/00, 1996, БИ N 11 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2208765C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ | 1999 |
|
RU2158001C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ | 1999 |
|
RU2150743C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ | 1999 |
|
RU2155985C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ МЕТОДОМ МАКСИМАЛЬНЫХ РАССТОЯНИЙ | 1999 |
|
RU2158957C1 |
| УСТРОЙСТВО БЕСШНУРОВОЙ КРОССОВОЙ КОММУТАЦИИ КАНАЛОВ | 2001 |
|
RU2214067C2 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ МЕТОДОМ НАИМЕНЬШИХ РАССТОЯНИЙ | 2002 |
|
RU2234732C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ | 1998 |
|
RU2150145C1 |
| СПОСОБ САМОКОНТРОЛЯ ВИЗУАЛЬНОЙ ЗАМЕТНОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2221209C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
Устройство предназначено для использования в области навигационных приборов, позволяющих осуществлять пространственную ориентацию оператора либо иного подвижного объекта при его перемещении по земной либо иной поверхности, характеризующейся наличием горизонтального магнитного поля. Устройство содержит датчик угловой ориентации, датчик перемещений, блок ввода исходных данных, вычислитель текущих координат, вычислитель азимут-дальность, блок управления, коммутатор и блок индикации. Целью изобретения является увеличение функциональных возможностей навигационного устройства, заключающееся в обеспечении: определения и индикации текущих координат точки нахождения оператора в процессе его перемещения на местности; определения и индикации в любой точке пути угла магнитного азимута (направления) и расстояния как до конечной, так и до начальной точек; индикации трассы пройденного пути с указанием на ней контрольных точек прохождения, определяемых как определенными моментами времени их прохождения, так и задаваемых оператором; "подкраски" для последующей индикации отличительных особенностей различных отрезков пути; индикации наложения изображения трассы совершаемого перемещения на изображение трассы ранее пройденного пути; выдачи информации о пройденном пути и расчетных данных на различные внешние устройства. Поставленная цель в заявляемом устройстве достигается благодаря дополнительному введению в его состав по сравнению с прототипом блока выявления изменений угловой ориентации, вычислителя параметров прямолинейных отрезков пути, вычислителя цикловых изменений координат, вычислителя изменения текущих координат, блока памяти циклов перемещения, датчика меток времени, датчика контрольных точек и элемента ИЛИ при соответствующих схемах их внутреннего построения, схеме соединения их между собой и с другими составными частями устройства. 4 з.п. ф-лы, 1 ил.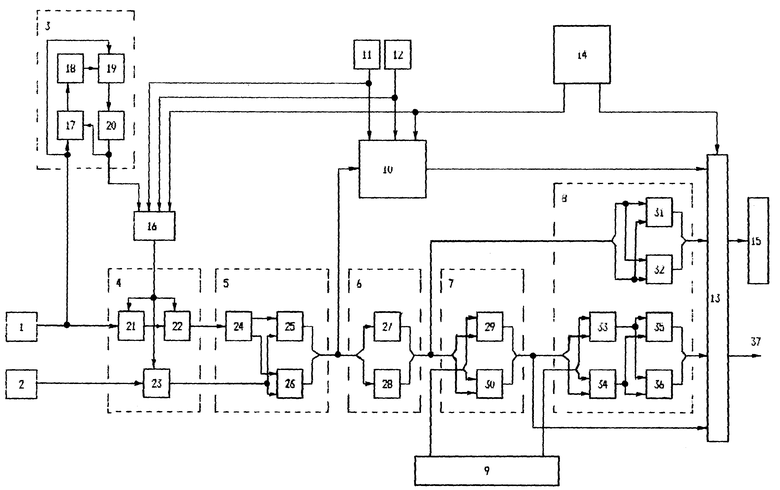
| RU 2058532 C1, 20.04.1996 | |||
| RU 2000544 C, 07.09.1993 | |||
| US 4132113, 02.01.1979 | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
