Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах определения местоположения источников радиоизлучения.
Известен способ определения двухмерного пеленга, включающий прием радиосигналов с помощью центральной антенны и антенн, образующих N - элементную кольцевую решетку, синхронное измерение амплитуд принятых радиосигналов  преобразование их в узлах сетки наведения решетки в угловой спектр и определение положения максимума его реальной части, причем координаты узлов сетки наведения решетки определяют путем равномерного квантования возможных значений азимутального и угломестного пеленгов, а угловой спектр определяют по формуле
преобразование их в узлах сетки наведения решетки в угловой спектр и определение положения максимума его реальной части, причем координаты узлов сетки наведения решетки определяют путем равномерного квантования возможных значений азимутального и угломестного пеленгов, а угловой спектр определяют по формуле  где n - номер антенны, причем n=N для центральной антенны и n=0, 1, ..., N-1 для других антенн, R - радиус решетки, λ - длина волны излучения, j, k - текущие координаты узлов сетки по углу места и азимуту, βj, θk - квантованные значения угла места и азимута, i - мнимая единица. (Патент РФ №2190236, 2000 г., МПК7 G 01 S 5/04)
где n - номер антенны, причем n=N для центральной антенны и n=0, 1, ..., N-1 для других антенн, R - радиус решетки, λ - длина волны излучения, j, k - текущие координаты узлов сетки по углу места и азимуту, βj, θk - квантованные значения угла места и азимута, i - мнимая единица. (Патент РФ №2190236, 2000 г., МПК7 G 01 S 5/04)
Недостатком данного способа является большое время пеленгования, обусловленное необходимостью выполнения значительного числа операций наведения решетки, особенно когда необходимо обеспечить малый шаг дискретизации положения диаграммы направленности решетки, или низкая точность - когда шаг дискретизации увеличен. Кроме того, в способе используется не вся возможная информация, в частности не используются сочетания пар антенн, не включающие опорную, что снижает помехозащищенность пеленгования.
Известен способ пеленгации, включающий прием радиосигналов с помощью центральной антенны и антенн, образующих N элементную кольцевую решетку, синхронное измерение и перемножение комплексных амплитуд радиосигналов, принятых центральной и другими антеннами, по результатам чего формируют два значения реальной части углового спектра на границах интервала поиска по углу места, которые образуют первые два узла сетки наведения антенной решетки, затем последовательно формируют координаты следующего узла сетки наведения решетки по углу места, при этом адаптируют их значения к значениям координат всех предыдущих узлов и значениям реальной части углового спектра в этих узлах до достижения заданной точности пеленгации по углу места, причем для каждой координаты узла сетки по углу места последовательно формируют координаты узлов сетки по азимуту, при этом адаптируют их значения к значениям координат всех предшествующих узлов и значениям реальной части углового спектра в этих узлах до достижения заданной точности пеленгации (Патент РФ №2207583, 2001 г., МПК7 G 01 S 3/00, 3/14).
В данном способе за счет неравномерной сетки наведения антенной решетки сокращается относительно указанного ранее способа число операций наведения решетки. Однако существенно возрастает число подготовительных операций и усложняются операции по обработке сигналов, связанные с формированием координат узлов сетки, выполнением адаптации и хранением промежуточных данных. Сохраняется недостаток, связанный с ограничением количества пар антенн, привлекаемых к обработке.
Наиболее близким по технической сущности к предлагаемому способу является способ определения двухмерного пеленга, включающий прием радиосигналов с помощью центральной антенны и антенн, образующих N элементную кольцевую решетку, синхронное измерение комплексных амплитуд принятых радиосигналов преобразование их в узлах сетки наведения решетки в угловой спектр и определение положения максимума его модуля, причем координаты узлов сетки наведения решетки определяют путем равномерного квантования возможных значений азимутального и угломестного пеленгов, а угловой спектр определяют по формуле

где n - номер антенны, причем n=N для центральной антенны и n=0, 1, ..., N-1 для других антенн, R - радиус решетки, λ - длина волны излучения, j, k - текущие координаты узлов сетки по углу места и азимуту, βj, θk - квантованные значения угла места и азимута, i - мнимая единица. (Патент США №4641143, 1987 г., МПК7 G 01 S 5/04).
В данном способе реализуется потенциальная точность и помехозащищенность пеленгования, соответствующая методу максимального правдоподобия. Однако процесс пеленгования требует значительных затрат времени (или ресурсов вычислительных средств), что обусловлено необходимостью выполнения большого числа операций над сигналами при наведении решетки. Равномерное квантование возможных значений угла места и азимута приводит к нерациональному завышению требований к дискретности определения угла места и азимута и увеличению времени пеленгования.
Технической задачей данного изобретения является уменьшение времени пеленгования.
Поставленная задача достигается тем, что в известном способе определения двухмерного пеленга включающем прием радиосигналов с помощью центральной антенны и антенн, образующих N - элементную кольцевую решетку при общем числе антенн не менее трех, синхронное измерение комплексных амплитуд принятых радиосигналов преобразование их в узлах сетки наведения решетки с текущим номером h и координатами Yh, Хh в угловой спектр и определение координат максимума его модуля, причем угловой спектр определяют по формуле

где n - номер антенны, равный N для центральной антенны и 0, 1, ..., N-1 для других антенн; i - мнимая единица; R - радиус решетки; λ - длина волны излучения, дополнительно определяют фазу и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, при этом координаты узлов сетки наведения решетки определяют путем равномерного квантования интервала [-1,+1] и определения пар квантованных чисел, сумма квадратов которых не превышает единицы.
Сопоставительный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного наличием, во-первых, новых действий над сигналами: определяют фазу и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, а также новых условий осуществления действий: координаты узлов сетки наведения решетки определяют путем равномерного квантования интервала [-1,+1] и определения пар квантованных чисел, сумма квадратов которых не превышает единицы.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
Известно, что ошибки определения угломестного и азимутального пеленга ограничиваются инструментальными погрешностями измерений, связанными с неидентичностью антенн, шумами и помехами. Для кольцевых антенных решеток эти ошибки обратно пропорциональны соответственно косинусу и синусу угла места [Дзвонская А.Л., Дмитриенко А.Н., Кузьмин А.В. Эффективность измерения углов прихода сигнала радиопеленгатором на основе метода максимального правдоподобия. Радиотехника и электроника. 2001, т.46, №10, с.1242-1247]. Поэтому желательно обеспечить и постоянный относительный (относительно инструментальных ограничений) уровень погрешности определения угломестного и азимутального пеленга, обусловленной квантованием.
В предлагаемом способе выполнено изменение системы координат узлов сетки наведения решетки. По физическому смыслу координаты Yh, Xh представляют собой нормированные (на параметр разноса решетки  набеги фаз между диаметрально противоположными точками решетки, расположенными на линии, параллельной опорному направлению (север - юг) и перпендикулярной ему (восток - запад). При этом определение координат узлов сетки путем равномерного квантования интервала [-1,+1] и определения среди квантованных чисел таких пар, сумма квадратов которых не превышает единицы, по сути, представляет собой равномерное квантование нормированных набегов фаз (а не возможных значений угла места и азимута, как в способе - прототипе). В совокупности с последующими действиями над сигналами это позволяет обеспечить постоянный относительный уровень погрешности определения угломестного и азимутального пеленга с более рациональным распределением ресурса обработки по возможным значениям двухмерного пеленга. Именно определение условий и использование возможности равномерного квантования нормированных набегов фаз в соответствии с предложенными новыми действиями над сигналами и условиями их осуществления позволяет сократить количество узлов решетки и циклов ее наведения и тем самым уменьшить время пеленгования.
набеги фаз между диаметрально противоположными точками решетки, расположенными на линии, параллельной опорному направлению (север - юг) и перпендикулярной ему (восток - запад). При этом определение координат узлов сетки путем равномерного квантования интервала [-1,+1] и определения среди квантованных чисел таких пар, сумма квадратов которых не превышает единицы, по сути, представляет собой равномерное квантование нормированных набегов фаз (а не возможных значений угла места и азимута, как в способе - прототипе). В совокупности с последующими действиями над сигналами это позволяет обеспечить постоянный относительный уровень погрешности определения угломестного и азимутального пеленга с более рациональным распределением ресурса обработки по возможным значениям двухмерного пеленга. Именно определение условий и использование возможности равномерного квантования нормированных набегов фаз в соответствии с предложенными новыми действиями над сигналами и условиями их осуществления позволяет сократить количество узлов решетки и циклов ее наведения и тем самым уменьшить время пеленгования.
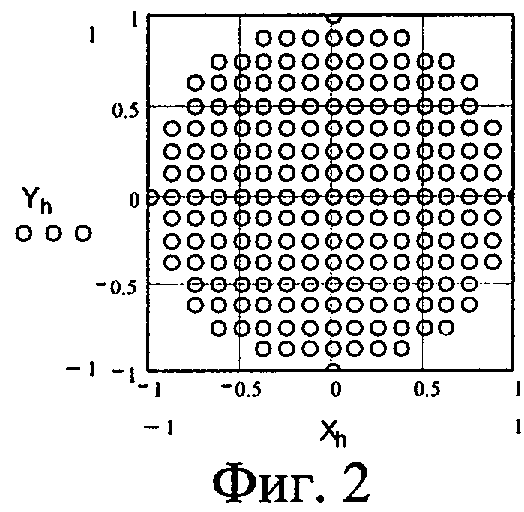
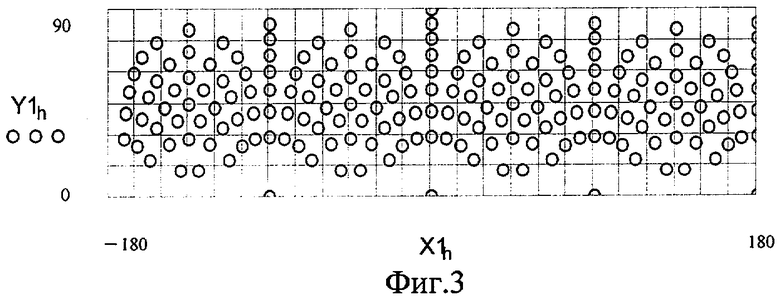
На фиг.1 приведена структурная схема устройства, реализующего предложенный способ, на фиг.2, 3 - расположение узлов сетки в координатах нормированных набегов фаз и "азимут-угол места" соответственно.
Устройство, реализующее предложенный способ, содержит последовательно соединенные антенную систему 1, включающую N+1 антенну 1.0, 1.1, ..., 1.N, радиоприемное устройство 2, измеритель комплексной амплитуды 3 и через первый вход вычислитель углового спектра 4, ко второму входу которого подключен выход формирователя поворачивающих множителей 5, вход которого соединен с первым выходом формирователя набега фаз 6, который содержит запоминающие устройства 7.1, 7.2, умножитель комплексных чисел 8, выход которого соединен с входом масштабного умножителя 9, выход которого является первым выходом формирователя набега фаз 6, устройство определения модуля 10, устройство определения максимума 11, содержащее запоминающую ячейку максимума 12 и компаратор 13, выход которого подключен к первому входу запоминающей ячейки координат 14, и последовательно соединенные блок определения модуля и фазы 15 через первый выход и блок определения арккосинуса 16. Запоминающие устройства 7.1, 7.2 выходами соединены с входами умножителя комплексных чисел 8. Выход вычислителя углового спектра 4 через устройство определения модуля 10, первый вход запоминающей ячейки максимума 12, первый вход компаратора 13 соединены последовательно. Выход устройства определения модуля 10 соединен со вторым входом компаратора 13, выход которого подключен ко второму входу запоминающей ячейки максимума 12. Выход запоминающего устройства 7.2 подключен ко второму входу запоминающей ячейки комплексных чисел 14. Второй выход блока определения модуля и фазы 15 является первым выходом устройства (азимутальный пеленг), вторым выходом которого является выход блока определения арккосинуса 16 (угломестный пеленг).
Антенная система 1 включает центральную антенну 1.N и антенны 1.0, 1.1, ..., 1.N-1, образующие N элементную кольцевую эквидистантную решетку при общем числе антенн не менее трех. Антенны идентичные всенаправленные (по крайней мере, в горизонтальной плоскости), типа вертикальный несимметричный вибратор, установлены на плоской поверхности Земли. Антенны имеют следующую нумерацию: n=N для центральной антенны (располагаемой в геометрическом центре кольца) и n=0, 1, ..., N-1 для других антенн. Одна из антенн решетки с номером n=0 ориентирована на север, нумерация других антенн решетки - по часовой стрелке в порядке возрастания номеров. Радиус решетки R.
Радиоприемное устройство 2 и измеритель комплексной амплитуды 3 многоканальные, с числом каналов N+1, равным числу антенн. Измеритель 3 обеспечивает синхронное измерение комплексных амплитуд радиосигналов на выходе антенн  и может быть выполнен с применением цифровой элементной базы, например, по схеме рис.3.14, приведенной в [Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь, 1987, с.67-69].
и может быть выполнен с применением цифровой элементной базы, например, по схеме рис.3.14, приведенной в [Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь, 1987, с.67-69].
Вычислитель углового спектра 4 реализует функцию типа сверка  здесь
здесь  - поворачивающие множители.
- поворачивающие множители.
Формирователь поворачивающих множителей 5 реализует функцию преобразования вида  =cos x+i·sin x, здесь х - сигнал на входе.
=cos x+i·sin x, здесь х - сигнал на входе.
Запоминающие устройства предназначены для хранения: 7.1 - комплексных величин вида  а 7.2 - значений координат узлов наведения решетки в комплексном виде Yh+i·Хh, где h - текущий номер узла. Информацию записывают до начала работы устройства. Объем запоминающего устройства 7.1 равен N+1, а запоминающего устройства 7.2 не превышает
а 7.2 - значений координат узлов наведения решетки в комплексном виде Yh+i·Хh, где h - текущий номер узла. Информацию записывают до начала работы устройства. Объем запоминающего устройства 7.1 равен N+1, а запоминающего устройства 7.2 не превышает  комплексных чисел, где U - число уровней квантования координат сетки наведения решетки.
комплексных чисел, где U - число уровней квантования координат сетки наведения решетки.
Запоминающие ячейки 12, 14 обеспечивают хранение и запись одного числа (в ячейке 14 - комплексного). Запись информации производится по сигналам с выхода компаратора. Исходное состояние запоминающей ячейки 12 - нулевое.
Блок определения модуля и фазы 15 и блок определения арккосинуса 16 реализуют функции преобразования вектора х (комплексного числа) соответственно A=arg(x), B= и C=arccos x. Эти блоки могут быть выполнены по способу Волдера [Бойков В.Д., Смолов В.Б. Аппаратурная реализация элементарных функций в ЦВМ. Л., ЛГУ, 1975, с.18-22].
и C=arccos x. Эти блоки могут быть выполнены по способу Волдера [Бойков В.Д., Смолов В.Б. Аппаратурная реализация элементарных функций в ЦВМ. Л., ЛГУ, 1975, с.18-22].
Принцип действия устройства состоит в следующем.
Перед началом работы в запоминающее устройство 7.2 заносят возможные значения нормированных (на параметр разноса решетки  , где R - радиус решетки, λ - длина волны излучения) набегов фаз между диаметрально противоположными точками решетки, расположенными на линии, параллельной опорному направлению (север - юг) и перпендикулярной ему (восток - запад)
, где R - радиус решетки, λ - длина волны излучения) набегов фаз между диаметрально противоположными точками решетки, расположенными на линии, параллельной опорному направлению (север - юг) и перпендикулярной ему (восток - запад)
где 0≤θ≤2π, 0≤β≤0.5π - возможные значения азимута угла места.
Эти значения, лежащие в пределах диапазона [-1,+1], предварительно равномерно квантуют и определяют пары квантованных чисел, сумма квадратов которых не превышает единицы. Результаты квантования используют как координаты узлов сетки наведения решетки Yh, Хh. Общее число узлов Н зависит от количества уровней квантования координат сетки наведения решетки U и стремится, но не превышает значения
Расположение узлов сетки наведения решетки в координатах Yh, Хh показано для U=17 на фиг.2. Узлы располагаются равномерно в пределах окружности единичного радиуса. Соответствующее этим условиям расположение узлов в координатах "азимут-угол места" (Х1h,Y1h) показано на фиг.3. Линии пересечения координатной сетки соответствуют варианту размещения узлов способа - прототипа. Видно, что предлагаемый вариант характеризуется существенной неравномерностью размещения узлов в координатах "азимут-угол места", плотность размещения которых падает в области углов места 0 и 0.5π, где и резко возрастают инструментальные погрешности пеленгования.
Квантование приводит к шумам, среднее квадратичное значение которых равно
При этом средняя квадратичная ошибка определения азимутального и угломестного пеленгов, обусловленная шумами квантования, в линейном приближении равна
Согласно формуле (4), зависимость ошибок, обусловленных квантованием, соответствует характеру указанной ранее зависимости инструментальных погрешностей пеленгования. Количество уровней квантования U определяют исходя из заданной ошибки пеленгования в точке наивысшей точности (β=0), выбирая ближайшее целое согласно выражению
Последующее функционирование устройства состоит в следующем. Радиосигналы источников излучения принимают с помощью антенн антенной системы 1 и радиоприемного устройства 2, на выходе которого с помощью измерителя 3 синхронно измеряют комплексные амплитуды принятых радиосигналов  В вычислителе углового спектра 4 совокупность комплексных амплитуд в узлах сетки наведения решетки преобразуют в угловой спектр
В вычислителе углового спектра 4 совокупность комплексных амплитуд в узлах сетки наведения решетки преобразуют в угловой спектр
Необходимые при этом поворачивающие множители  формируют в формирователе 5, используя набеги фаз ϕh(n), поступающие с первого выхода формирователя набега фаз 6. Для определения набегов фаз из запоминающего устройства 7.2 считывают значения координат узлов наведения решетки (нормированных набегов фаз) Хh, Yh, а из запоминающего устройств 7.1 - значения величин
формируют в формирователе 5, используя набеги фаз ϕh(n), поступающие с первого выхода формирователя набега фаз 6. Для определения набегов фаз из запоминающего устройства 7.2 считывают значения координат узлов наведения решетки (нормированных набегов фаз) Хh, Yh, а из запоминающего устройств 7.1 - значения величин  . Эти значения перемножают в умножителе комплексных чисел 8, выделяют реальную часть и умножают в масштабном умножителе 10 на параметр разноса . При этом получают набеги фаз в антеннах для возможных направлений на источник излучения
. Эти значения перемножают в умножителе комплексных чисел 8, выделяют реальную часть и умножают в масштабном умножителе 10 на параметр разноса . При этом получают набеги фаз в антеннах для возможных направлений на источник излучения

В устройстве 10 определяют модуль углового спектра (6), текущие значения которого (для очередного h) сравнивают в компараторе 13 устройства определения максимума 11 с запомненными в запоминающей ячейке 12. При текущем значении, превышающем запомненные, сигналом с выхода компаратора выполняют по управляющим входам перезапись текущего значения в запоминающую ячейку 12 и одновременно соответствующие значения координат узла наведения решетки регистрируют в запоминающей ячейке 14. Таким образом, после перебора всех узлов наведения решетки одновременно с определением максимума модуля углового спектра в запоминающей ячейке 14 регистрируют в точке максимума  координаты максимума модуля углового спектра
координаты максимума модуля углового спектра  ,
,  . Координаты однозначно определяются положением источника излучения.
. Координаты однозначно определяются положением источника излучения.
На завершающей стадии вектор (комплексное число) с ортогональными составляющими, равными координатам максимума модуля углового спектра, образующийся по выходу запоминающей ячейки 14, преобразуют способом обратным выражению (1) и получают искомые значения азимутального и угломестного пеленга

Функциональное преобразование (8) выполняют с применением блока определения модуля и фазы 15, на первый выход которого (фаза вектора) поступает значение азимутального пеленга, а на второй - значение модуля вектора, и блока определения арккосинуса 16, на выходе которого получают угломестный пеленг.
В вариантном исполнении с наивысшей скоростью пеленгования возможные значения азимута и угла места, соответствующие узлам наведения решетки, рассчитывают заранее с применением формулы (8) и заносят в дополнительное запоминающее устройство. Считывание информации из этого запоминающего устройства выполняют синхронно со считыванием координат узлов сетки наведения решетки из запоминающего устройства 7.2. Запоминающую ячейку координат 14 при этом подключают к выходу дополнительного запоминающего устройства и регистрируют в ней непосредственно азимутальный и угломестный пеленги. Блоки (15), (16) в этом варианте из состава устройства исключаются.
При необходимости пеленгования радиосигнала на новой частоте (длине волны) в устройстве достаточно изменить только параметр разноса умножителя 9, не изменяя содержимого запоминающих устройств, что дополнительно сокращает время пеленгования.
Предложенный способ применим при ограниченном составе антенной системы с числом антенн не менее трех, например в отсутствии центральной или других антенн. В этом случае соответствующие значения комплексных амплитуд равны нулю. Указанное обстоятельство повышает надежность реализующих способ устройств, в частности, при выходе из строя части элементов (антенн, каналов радиоприемного устройства, измерителя комплексных амплитуд).
Для оценки технического результата, достигаемого предлагаемым способом (уменьшение времени пеленгования), определим прямо пропорциональное времени пеленгования потребное количество циклов наведения антенной решетки при обеспечении средней квадратичной ошибки определения пеленга, обусловленной шумами квантования не хуже заданной. Завершающие операции над сигналом: определение фазы и арккосинуса модуля вектора, выполняются однократно и мало влияют на время пеленгования.
В предлагаемом способе количество циклов наведения решетки с учетом формулы (5) определяется соотношением
Для способа-прототипа, с учетом равномерного квантования возможных значений угла места и азимута, количество циклов наведения следующее
Сравнение соотношений (9) и (10) показывает, что предлагаемое решение обеспечивает сокращение в π раз числа необходимых операций наведения антенной решетки и соответственно уменьшение в 3.14 раз времени пеленгования.
Работоспособность способа и корректность основных расчетных соотношений подтверждена на модели устройства, реализующего предложенный способ в системе Mathcad-2001. Моделирование выполнено при регулируемых параметрах антенной системы, отношении сигнал - шум, количестве уровней квантования координат сетки наведения решетки, значениях углов прихода и длины волны радиоизлучений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО СПЕКТРА | 2011 |
|
RU2452974C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| РАДИОПЕЛЕНГАТОР ДЛЯ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2004 |
|
RU2276381C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2251707C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| Способ моноимпульсного пеленгования источников поляризованных радиосигналов | 2024 |
|
RU2834965C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах определения местоположения источников радиоизлучения. Технический результат: уменьшение времени пеленгования. В способе определения двухмерного пеленга, включающем прием радиосигналов с помощью центральной антенны и антенн, образующих N элементную кольцевую решетку, при общем числе антенн не менее трех, синхронное измерение комплексных амплитуд принятых радиосигналов  преобразование их в узлах сетки наведения решетки с текущим номером h и координатами Yh, Хh в угловой спектр и определение координат максимума его модуля, причем угловой спектр определяют по формуле
преобразование их в узлах сетки наведения решетки с текущим номером h и координатами Yh, Хh в угловой спектр и определение координат максимума его модуля, причем угловой спектр определяют по формуле  где n - номер антенны, равный N - для центральной антенны и 0, 1, ..., N-1 - для других антенн; i - мнимая единица; R - радиус решетки; λ - длина волны излучения, согласно изобретению дополнительно определяют фазу и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, при этом координаты узлов сетки наведения решетки определяют путем равномерного квантования и определения пар квантованных чисел, сумма квадратов которых не превышает единицы. 3 ил.
где n - номер антенны, равный N - для центральной антенны и 0, 1, ..., N-1 - для других антенн; i - мнимая единица; R - радиус решетки; λ - длина волны излучения, согласно изобретению дополнительно определяют фазу и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, при этом координаты узлов сетки наведения решетки определяют путем равномерного квантования и определения пар квантованных чисел, сумма квадратов которых не превышает единицы. 3 ил.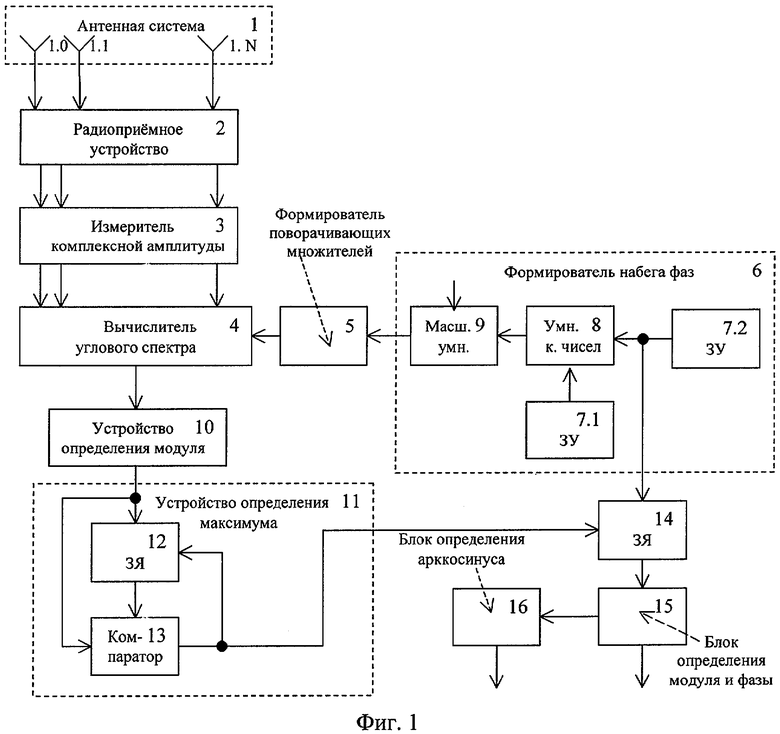
Способ определения двухмерного пеленга, включающий прием радиосигналов с помощью центральной антенны и антенн, образующих N элементную кольцевую решетку при общем числе антенн не менее трех, синхронное измерение комплексных амплитуд принятых радиосигналов, преобразование их в узлах сетки наведения решетки в угловой спектр и определение координат максимума его модуля, отличающийся тем, что значение азимута и угла места двухмерного пеленга определяют как фазу вектора и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, а узлы сетки наведения решетки определяют в системе координат нормированных набегов фаз радиосигналов между диаметрально противоположными точками решетки на линии, параллельной опорному направлению и перпендикулярной ему, путем равномерного квантования нормированных набегов фаз и определения всех пар их значений, сумма квадратов которых не превышает единицы, причем преобразование комплексных амплитуд принятых радиосигналов в угловой спектр определяют по формуле

где Yh, Xh - координаты h-го узла сетки наведения решетки с текущим номером h;
n - номер антенны, равный N - для центральной антенны и 0, 1, ..., (N-1) - для других антенн;
 - комплексная амплитуда радиосигнала, принятого n-й антенной;
- комплексная амплитуда радиосигнала, принятого n-й антенной;
i - мнимая единица;
π=3,14...;
R - радиус решетки;
λ - длина волны радиоизлучения.
| US 4641143 А, 03.02.1987 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| СПОСОБ РАДИОКОНТРОЛЯ | 1999 |
|
RU2158002C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2150122C1 |
| US 3887923 А, 03.06.1975 | |||
| US 4626859 A, 02.12.1986. | |||

