Изобретение относится к контрольно-измерительной технике и может быть использовано для обнаружения на поверхности контролируемых объектов (например, зерна злаков) дефектов различного происхождения: механических, цветности, посторонних включений в структуру материала объекта.
Известен способ обнаружения дефектов поверхности (а.с. СССР N 1495693, кл. G 01 М 21/88, бюллетень N 27, 1989), заключающийся в том, что световой поток направляют на поверхность контролируемой детали, регистрируют и преобразуют в электрические сигналы зеркально и диффузно отраженные световые потоки, измеряют сумму предварительно усиленных сигналов и по величине этой суммы судят о дефектности поверхности. Недостатком способа является низкая надежность обнаружения дефектов при высоком уровне шумов.
Наиболее близким является способ обнаружения дефектов поверхности (з. N 94045194 от 27.12.94 RU G 01 N 21/88, бюллетень "Изобретения" N 27, 1 ч., 1997), заключающийся в том, что световое излучение направляют на поверхность контролируемого объекта, регистрируют и преобразуют в электрические сигналы зеркально и диффузно отраженные световые потоки, которые регистрируют и преобразовывают в электрические сигналы дискретно, в точках поверхности, интервал между которыми не превышает среднего расстояния между гребешками микронеровностей для данного класса объектов, измеряют оценку корреляционного момента между случайными значениями сигналов зеркальной и диффузной составляющих и по его величине судят о наличии или отсутствии дефектов на поверхности объекта.
Недостатком способа является необходимость в ориентации объекта перед контролем и вращение его при контроле с постоянной скоростью, что увеличивает время дефектоскопии.
Задачей настоящего изобретения является создание способа обнаружения дефектов поверхности контролируемого объекта в потоке, без его дополнительной ориентации, с высокой достоверностью со значительным снижением времени дефектоскопии.
Поставленная задача решается тем, что в предлагаемом способе направляют световое излучение на поверхность перемещаемого контролируемого объекта, регистрируют световые потоки фотоприемниками, преобразуют их в дискретные электрические сигналы, измеряют величины оценок корреляционных моментов между случайными значениями сигналов и по ним судят о наличии или отсутствии дефектов на поверхности контролируемого объекта. Но в отличие от прототипа зону облучения контролируемого объекта формируют путем пересечения световых потоков направленного излучения с площадью нормальной проекции каждого из них, большей площади максимальной проекции контролируемого объекта, от не менее трех идентичных источников, расположенных в пространстве равноудаленно друг от друга и от центра пересечения световых потоков. Контролируемый объект перемещают равномерно и прямолинейно через зону облучения, регистрируют рассеянные им световые потоки фотоприемниками, с площадью рабочей поверхности, равной или большей площади нормальной проекции светового потока. Каждый из фотоприемников располагают равноудаленно от соответствующего источника в ходе светового потока. После регистрации световых потоков и преобразовании их в дискретные электрические сигналы (например, квантованием по уровню), измеряют величины оценок корреляционных моментов между случайными значениями сигналов на каждой паре фотоприемников, получая, таким образом, ряд величин оценок корреляционных моментов с количеством членов ряда, определяемым числом возможных сочетаний пар фотоприемников по формуле
где В - общее число фотоприемников.
Ранжируя полученный ряд по возрастанию или по убыванию, получим непрерывно возрастающий или непрерывно убывающий ряд величин оценок корреляционных моментов.
Для группы однотипных контролируемых объектов имеет место независимо от их ориентации постоянный ряд чисел, равных величинам оценок корреляционных моментов между сигналами фотоприемников. При наличии дефектов на поверхности контролируемого объекта световые потоки, рассеянные этим контролируемым объектом, перераспределяются между фотоприемниками и по отклонению величин оценок корреляционных моментов от величин оценок корреляционных моментов, предварительно вычисленных, для бездефектной поверхности по формуле
где N - объем выборки, обеспечивающий состоятельность оценок корреляционных моментов при заданных уровне доверительной вероятности и величине доверительного предела для всех пар фотоприемников, и рассчитываемый по известным методикам (например, Збигнев Павловский. Введение в математическую статистику. - М., "Статистика", 1967);
i и j - индексы, показывающие номера фотоприемников, между которыми оценивается корреляция, причем i и j меняются в пределах i = 1...(B-1), а j = (i+1) ... B; (например, для B = 5 индексы фотоприемников будут следующие: i = 1, j = 2, 3, 4, 5; i = 2, j = 3, 4, 5; i = 3, j = 4, 5; i = 4, j = 5 и, следовательно, возможны следующие сочетания фотоприемников: 1- 2, 1-3, 1-4, 1-5, 2-3, 2-4, 2-5, 3-4, 3-5, 4-5); текущие значения сигналов, фиксируемые фотоприемниками с индексами i и j;
текущие значения сигналов, фиксируемые фотоприемниками с индексами i и j;
ν - индекс, показывающий номер сигнала в выборке на соответствующем фотоприемнике, причем ν = 1, 2,..., N, средние арифметические значения сигналов, фиксируемые фотоприемниками с индексами i и j в выборках объемом N;
средние арифметические значения сигналов, фиксируемые фотоприемниками с индексами i и j в выборках объемом N;
и затем ранжированных, судят о наличии или отсутствии дефектов на поверхности контролируемого объекта.
На фиг. 1 приведена схема расположения источников 2, 3, 4, фотоприемников 5, 6, 7 и объекта контроля 1, перемещающегося через зону облучения (з. о. ) равномерно и прямолинейно. Каждый источник удален от центра пересечения световых потоков О на расстояние L1. Каждый фотоприемник удален от соответствующего источника на расстояние L2 и расположен в ходе светового потока. Площадь нормальной проекции светового потока Sп больше площади максимальной проекции контролируемого объекта Sко. Рабочая площадь каждого фотоприемника Sфп равна или больше площади нормальной проекции светового потока Sп.
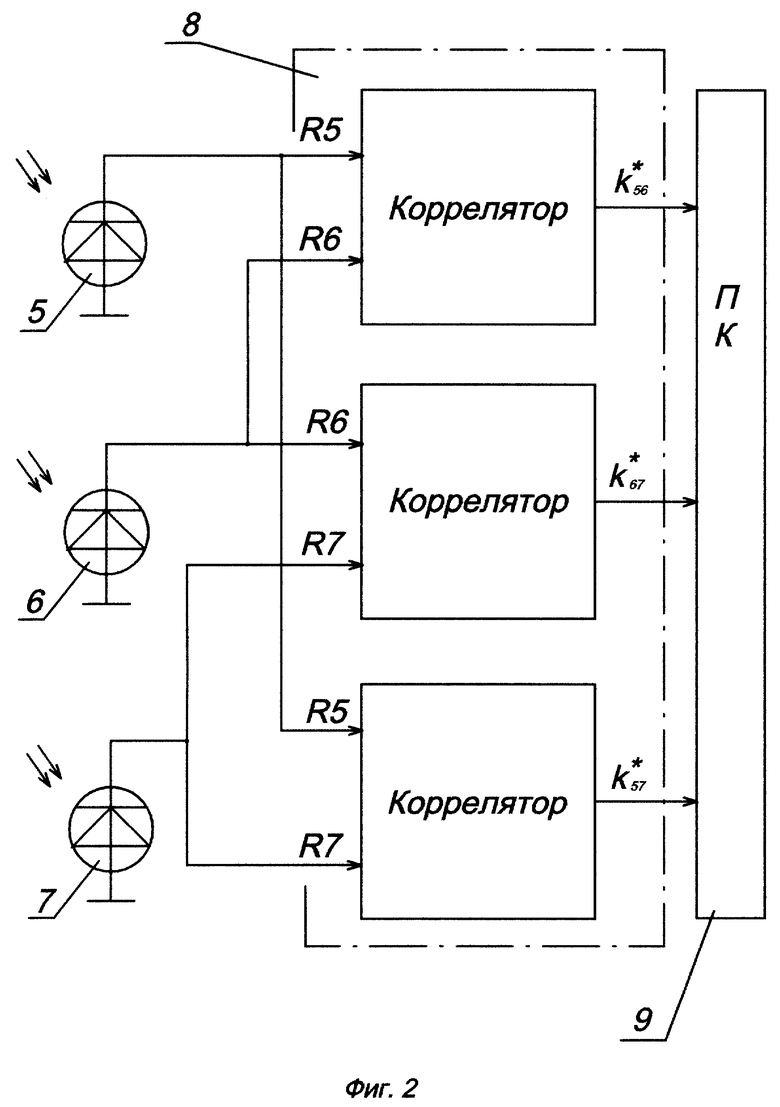
Предлагаемый способ реализован в устройстве, представленном схемой на фиг. 2. Устройство включает фотоприемники 5, 6, 7, расположенные в ходе световых потоков, коррелометра 8, входы которого соединены с выходами фотоприемников 5, 6 и 7 и персонального компьютера 9, в котором осуществляется ранжирование. Способ заключается в следующем.
При перемещении контролируемого объекта 1 мимо источников 2, 3, 4 равномерно и прямолинейно, через зону облучения (з.о.) световые потоки, падающие на фотоприемники 5, 6, 7, регистрируют и преобразуют в дискретные электрические сигналы (например, квантованием по уровню), измеряют оценки корреляционных моментов между случайными значениями сигналов каждой пары фотоприемников (k56*, k57*, k67*), получая, таким образом, ряд величин оценок корреляционных моментов. Ранжируя его по возрастанию или по убыванию в персональном компьютере 9, получаем непрерывно возрастающий или непрерывно убывающий ряд величин оценок корреляционных моментов. При отсутствии дефектов величины оценок корреляционных моментов, упорядоченные по возрастанию или убыванию, имеют практически постоянное значение. При наличии на поверхности контролируемого объекта дефектов любого происхождения (механические или дефекты цветности) при сравнении упорядоченного ряда величин оценок корреляционных моментов с упорядоченным рядом для бездефектной поверхности будут наблюдаться отклонения в величинах оценок корреляционных моментов.
Схема на фиг. 2 реализует измерение несмещенных и состоятельных статистических оценок корреляционных моментов по формуле (2) между каждой парой фотоприемников и их ранжирование.
После того, как величины оценок корреляционных моментов для бездефектной поверхности определены, в целях уменьшения количества математических операций и, следовательно, затрат времени на дефектоскопию можно провести перерасчет объема выборки, обеспечивающего состоятельность оценок корреляционных моментов для всех пар фотоприемников.
Достоверность контроля предложенным способом определяется точностью и надежностью определения оценок корреляционных моментов (k6*, k57*, k67*,... ), мерой которых является вероятность того, что величина ошибки не превосходит заданного значения доверительного предела P(|Δ| < δ) = p, где Δ =kij* - Kij - величина ошибки; ±δ - доверительные пределы оценки корреляционного момента между фотоприемниками с индексами i и j, характеризующие точность оценки; p - доверительная вероятность, характеризующая надежность оценки; Kij - корреляционный момент между фотоприемниками с индексами i и j.
Принимая гипотезу о нормальности распределения ошибки, определяем величину среднеквадратического отклонения ошибки
где Di - дисперсия сигнала на фотоприемнике с индексом i; Dj - дисперсия сигнала на фотоприемнике с индексом j; nij - объем выборки, обеспечивающий состоятельность оценки корреляционного момента для пары фотоприемников с индексами i и j.
Учитывая, что значение доверительного предела при заданной доверительной вероятности δ = σΔtP/2, где tp/2 - величина аргумента функции Лапласа при ее значении Фt=p/2, из выражения (3) следует, что минимальный объем выборки для пары фотоприемников с индексами i и j при заданных уровнях доверительной вероятности и доверительного предела, равен
При определении объема выборки необходимо значения дисперсий и корреляционного момента заменить их оценками di, dj, kij*, вычисленными для бездефектной поверхности.
Нетрудно заметить, что для каждой пары фотоприемников (5 - 6, 6-7, 5-7,. ..) объемы выборок (n56, n67, n57,...) будут варьироваться. Поэтому для определения одного общего для всех пар фотоприемников объема выборки n необходимо выбрать минимально допустимое значение nij для пары фотоприемников с индексами i и j, для которых выполняется условие:
didj+kij*2=max (5)
среди всех пар фотоприемников (5-6, 6-7, 5-7, ...). Подставляя затем это значение max в числитель формулы (4), мы получим рекомендуемый общий для всех пар фотоприемников объем выборки n, который будет меньше N, и который при расчете оценок корреляционных моментов для контролируемой поверхности по формуле (2) ставится вместо параметра N. Формула соответственно принимает следующий вид:
Пример. Для бездефектной поверхности контролируемого объекта (зерно пшеницы) значения оценок дисперсий сигналов составили d5 = 0,675; d6 = 0,621; d7 = 0,643.
Для вычисления оценок корреляционных моментов для бездефектной поверхности по формуле (2) необходимо рассчитать объем выборки N, обеспечивающий состоятельность оценок корреляционных моментов при заданных уровне доверительной вероятности и величине доверительного предела для всех пар фотоприемников. Для этого воспользуемся известной методикой (Збигнев Павловский. Введение в математическую статистику. - М., "Статистика", 1967).
Среди всех пар фотоприемников выберем пару, у которой сумма оценок дисперсий сигналов будет максимальна:
d5 + d6 = 0,675 + 0,621 = 1,296;
d6 + d7 = 0,621 + 0,643 = 1,264;
d5 + d7 = 0,675 + 0,643 = 1,318 - max.
Вычислим необходимый объем выборки, который будет обеспечивать состоятельность оценок корреляционных моментов для всех пар фотоприемников при уровне доверительной вероятности p = 0,9 и величине доверительного предела δ = 0,2 по формуле
Вычисленное таким образом значение необходимого объема выборки составило N = 55.
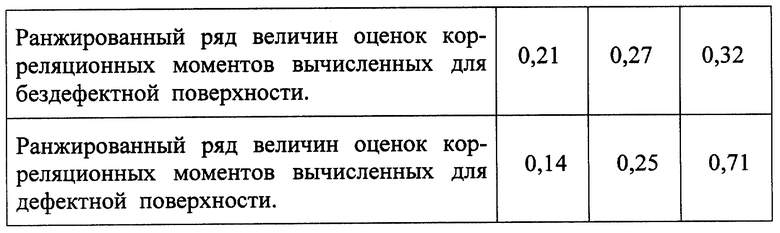
Значения величин оценок корреляционных моментов для бездефектной поверхности, вычисленные по формуле (2), составили k6* = 0,21; k67* = 0,32; k57* = 0,27.
Ранжируя их по возрастанию, получим ряд чисел: 0,21; 0,27; 0,32.
При расчете оценок корреляционных моментов для контролируемой поверхности для уменьшения количества математических операций и, следовательно, затрат времени на дефектоскопию пересчитаем необходимый объем выборки n, обеспечивающий состоятельность оценок корреляционных моментов для всех пар фотоприемников. Для этого:
вычислим числители формулы (4):
d5d6 + k56*2 = 0,675 · 0,621 + 0,272 = 0,463;
d6d7 + k67*2 = 0,621 · 0,643 + 0,322 = 0,502;
d5d7 + k57*2 = 0,675 · 0,643 + 0,272 = 0,507;
выберем из них значение, отвечающее условию (5): max=0,507.
При уровне доверительной вероятности p = 0,9 и величине доверительного предела δ = 0,2 общий для всех пар фотоприемников объем выборки, вычисленный по формуле (4), составил n = 22. Расчет оценок корреляционных моментов для контролируемой поверхности выполняем по формуле (6).
На поверхности дефектного зерна пшеницы имеется заплесневевший участок размером 1х1 мм. Для каждой выборки объемом n = 22 были измерены оценки корреляционных моментов между случайными значениями сигналов на каждой паре фотоприемников:
k56*д = 0,25; k67*д = 0,71; k57*д = 0,14.
Ранжируя их по возрастанию, получим ряд чисел: 0,14; 0,25; 0,71.
Полученные результаты сведены в таблицу.
Анализ поверхности, проведенный корреляционным способом, без дополнительной ориентации контролируемого объекта, надежно установил наличие дефекта поверхности, при минимальных затратах времени на дефектоскопию. Предложенный способ найдет широкое применение при дефектоскопии малогабаритных объектов в потоке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ПОВЕРХНОСТИ | 1998 |
|
RU2142622C1 |
| СПОСОБ ДИАГНОСТИКИ ДЕФЕКТОВ НА МЕТАЛЛИЧЕСКИХ ПОВЕРХНОСТЯХ | 2012 |
|
RU2522709C2 |
| СПОСОБ ДИАГНОСТИКИ ДЕФЕКТОВ НА МЕТАЛЛИЧЕСКИХ ПОВЕРХНОСТЯХ | 2014 |
|
RU2581441C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ ТЕЛ ВРАЩЕНИЯ | 2000 |
|
RU2164664C1 |
| Способ обнаружения дефектов поверхности | 1986 |
|
SU1388725A1 |
| Способ обнаружения дефектов поверхности | 1984 |
|
SU1239568A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 2007 |
|
RU2361199C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ РАДУЖНОЙ ОБОЛОЧКИ ГЛАЗА | 1993 |
|
RU2065723C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВЫЧИСЛИТЕЛЬНЫХ ТОМОГРАММ | 1999 |
|
RU2176479C2 |
| Способ автоматического контроля дефектов поверхности деталей и изделий | 1990 |
|
SU1782314A3 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для обнаружения на поверхности контролируемых объектов (КО) дефектов различного происхождения. Сущность: световое излучение направляют на поверхность перемещаемого КО. Зону облучения КО формируют путем пересечения световых потоков направленного излучения с площадью нормальной проекции каждого из них, большей площади максимальной проекции КО, от не менее трех идентичных источников, расположенных в пространстве равноудаленно друг от друга и от центра пересечения световых потоков. КО перемещают равномерно и прямолинейно через зону облучения, регистрируют рассеянные КО световые потоки фотоприемниками с площадью рабочей поверхности, равной или большей площади нормальной проекции светового потока. Каждый из фотоприемников расположен равноудаленно от соответствующего источника в ходе светового потока. Зарегистрированные световые потоки преобразуют в дискретные электрические сигналы (например, квантованием по уровню), измеряют величины оценок корреляционных моментов (ВОКМ) между случайными значениями сигналов на каждой паре фотоприемников, получая, таким образом, ряд ВОКМ с количеством членов ряда, определяемым числом возможных сочетаний пар фотоприемников. Ранжируя его по возрастанию или по убыванию, получают непрерывно возрастающий или непрерывно убывающий ряд ВОКМ. Технический результат: создание способа обнаружения дефектов поверхности КО в потоке без их дополнительной ориентации, с высокой достоверностью со значительным снижением времени дефектоскопии. 2 ил., 1 табл.
Способ обнаружения дефектов поверхности, заключающийся в направлении светового излучения на поверхность перемещаемого контролируемого объекта, регистрации световых потоков фотоприемниками и преобразовании их в дискретные электрические сигналы, измерении величин оценок корреляционных моментов между случайными значениями сигналов и сравнении величин оценок корреляционных моментов, по величине которых судят о наличии или отсутствии дефектов на поверхности контролируемого объекта, отличающийся тем, что зону облучения контролируемого объекта формируют путем пересечения световых потоков направленного излучения с площадью нормальной проекции каждого из них, большей площади максимальной проекции контролируемого объекта, от не менее трех идентичных источников, расположенных в пространстве равноудаленно друг от друга и от центра пересечения световых потоков, контролируемый объект перемещают равномерно и прямолинейно через зону облучения, регистрируют рассеянные контролируемым объектом световые потоки фотоприемниками с площадью рабочей поверхности, равной или большей площади нормальной проекции светового потока, каждый из которых расположен равноудаленно от соответствующего источника в ходе светового потока, ранжируют по возрастанию или убыванию ряд, состоящий из величин оценок корреляционных моментов между случайными значениями сигналов на каждой паре фотоприемников, с количеством членов ряда, определяемым числом возможных сочетаний пар фотоприемников по формуле
где B - общее число фотоприемников,
и по отклонению величин оценок корреляционных моментов от величин оценок корреляционных моментов, предварительно вычисленных для бездефектной поверхности по формуле
где N - объем выборки, обеспечивающий состоятельность оценок корреляционных моментов при заданных уровне доверительной вероятности и величине доверительного предела для всех пар фотоприемников;
i и j - индексы, показывающие номера фотоприемников, между которыми оценивается корреляция, причем i и j меняются в пределах i = 1 ... (B - 1), а j = (i + 1) ... B; текущие значения сигналов, фиксируемые фотоприемниками с индексами i и j;
текущие значения сигналов, фиксируемые фотоприемниками с индексами i и j;
v - индекс, показывающий номер сигнала в выборке на соответствующем фотоприемнике, причем v = 1, 2, ..., N;
 средние арифметические значения сигналов, фиксируемые фотоприемниками с индексами i и j в выборках объемом N,
средние арифметические значения сигналов, фиксируемые фотоприемниками с индексами i и j в выборках объемом N,
и затем ранжированных судят о наличии или отсутствии дефектов на поверхности контролируемого объекта.
| RU 94045194, 27.09.1997 | |||
| Способ дефектоскопии поверхности | 1989 |
|
SU1702262A1 |
| Способ обнаружения дефектов поверхности | 1987 |
|
SU1495693A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ПОВЕРХНОСТИ | 1998 |
|
RU2142622C1 |
| US 5404023 A, 04.04.1994. | |||
