Рентгеновское штативное устройство применяется в рентгенотехнике с прецизионным устройством сканирования пациента узкоколлимированным пучком γ- излучения.
В качестве ближайшего аналога (прототипа) предлагаемого устройства выбрано рентгеновское штативное устройство МЦРУ - "Сибирь-Н" (каталог на Web сервере РИНКЦЭ http:/ www.extech.msk.su (раздел "Наука и образование").
Прототип положил начало созданию этого типа рентгеновских аппаратов. В других типах аппаратов движение осуществляют с целью перемещения рентгеновского штатива (штатива) в зону обследования пациента. Качество движения штатива при этом не влияет на качество изображения снимка.
В прототипе сбор информации для построения изображения снимка ЭВМ выполняет во время движения штатива и потому неравномерность движения, нестабильность сканирующей скорости штатива, вибрация искажают информацию, что негативно отражается на качестве изображения снимка.
Прототип содержит стойку механизма сканирующего движения штатива вертикального исполнения. Уравновешенный противовесом штатив, поддерживая источник излучения, коллиматор и приемник излучения, осуществляет сканирующее движение по прямолинейным направляющим стойки. Движение осуществляет электропривод с редуктором по рейке стойки. Прямолинейные направляющие стойки поддерживают каретку штатива на опорах в виде шарикоподшипников. Шарикоподшипники опираются на плоскости направляющих наружным диаметром и связаны с кареткой штатива плоскими пружинами.
Штативное устройство прототипа имеет ряд существенных недостатков, главные из которых:
- низкая динамическая жесткость опоры каретки штатива при ее низкой нагрузочной способности и в результате узкая, для видов аппаратов, применимость;
- низкая плавность сканирующего движения штатива при низкой виброустойчивости;
- низкая стабильность скорости в сканирующем движении с низким эргономическим качеством в перемещении и управлении поступательным движением штатива.
Низкая динамическая жесткость устройства вследствие низкой нагрузочной способности опоры каретки штатива приводит к повышению амплитуды колебаний составных частей штативного устройства: источника излучения, коллиматора, приемника излучения, имеющих собственные частоты колебаний. Низкая нагрузка в опоре каретки штатива вследствие низкой нагрузочной способности опоры приводит при действии гравитационных сил к раскрытию стыка, недопустимой вибрации. Причина низкой нагрузочной способности опоры каретки штатива прототипа в том, что шарикоподшипник, опираясь наружным диаметром на плоскость направляющей, несет в себе циркуляционный характер нагружения обоймы, что ограничивает силу прижатия шарикоподшипника к направляющей - статическую силу реакции Fст (силу реакции Fст) в опоре каретки штатива. Вместе с тем, и циркуляционный характер практически не обеспечивается, поскольку он имеет повышенную чувствительность к неточности установки подшипникового узла, что делает касание обоймы шарикоподшипника с направляющей по линии трудно достижимым. Кроме того, ненадежность монтажа в сочетании с погрешностями форм сопрягаемых деталей приводит к изменению циркуляционного характера нагружения обоймы, что обязывает при монтаже снижать и без того низкую силу реакции Fст в опоре. В противном случае, в условиях сложного контроля целого ряда погрешностей монтаж приводит к непредсказуемому росту напряжения в обойме, что приводит к резкому падению долговечности сканирующего устройства - ресурсу до списания. С другой стороны, вынужденное снижение нагрузки в опоре приводит к резкому снижению динамической жесткости, раскрытию стыка. Поскольку прототип выполнен в вертикальном исполнении стойки, опоры каретки штатива от сил гравитации испытывают малые нагрузки. Вследствие неспособности опор каретки штатива нести повышенные нагрузки устройство поддержки штатива имеет узкую, для видов аппаратов, применимость.
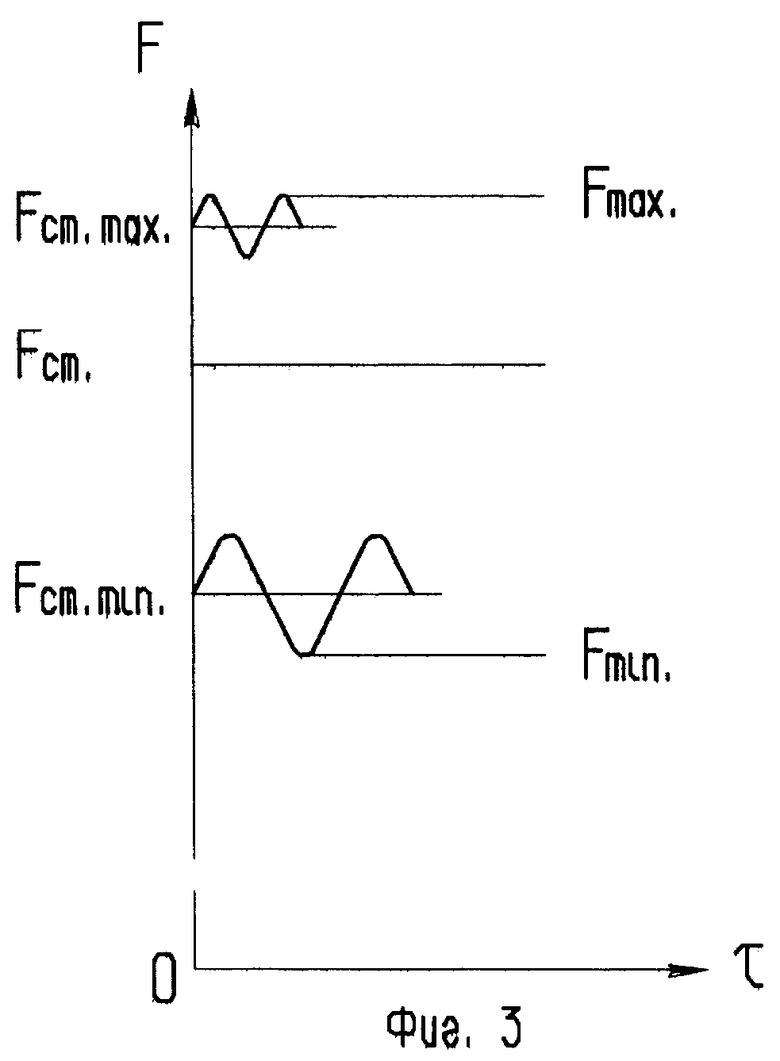
Для лучшего понимания характера действия силы реакции F в опоре прототипа рассмотрим на диаграмме, фиг. 3, изменение силы реакции F в опоре каретки поворотного рентгеновского штатива. Действие силы реакции F в опоре обусловлено действием статической силы от упругого элемента Fст, действием силы гравитации в диапазоне изменения силы Fст.min - Fст.max и действием силы от вибрации. Изменение силы F при этом находится в диапазоне изменения силы Fmin - Fmax. Из диаграммы следует: при значительном по величине диапазоне действия в опоре сил гравитации и малом усилии от упругого элемента Fст опора может потерять знакопостоянную (положительного знака) нагрузку F, что приведет к раскрытию стыка, приведет к недопустимо низкой динамической жесткости и как следствие - недопустимой вибрации.
Применение в прототипе электропривода штатива с редуктором приводит дополнительно к существенным недостаткам: снижению плавности хода, повышению шума, расширению диапазона изменения силы Fmin - Fmax из-за возрастающей амплитуды колебаний. При этом увеличиваются амплитуды колебания частей штатива: источника излучения, коллиматора и приемника излучения, имеющих собственные частоты колебаний, что приводит к увеличению отклонения этих частей от общей оптической оси и необходимости увеличения толщины рентгеновского пучка, а это, соответственно, - к увеличению дозы облучения пациента. Кроме того, электропривод с редуктором из-за жесткого зацепления его с рейкой снижает эргономическое качество устройства, поскольку при этом способе зацепления штатив не перемещается вручную.
В основу изобретения положена задача создания унифицированного устройства прецизионного линейного сканирования в поступательном движении штатива, отличающегося повышенной надежностью (безотказностью, долговечностью) с возможностью снижения дозы облучения за счет снижения вибрации и повышения виброустойчивости посредством повышения динамической жесткости и нагрузочной способности опор каретки штатива; плавностью хода и низким шумом за счет устройства движения штатива, повышенным эргономическим качеством за счет создания оптимального управления движением штатива.
Поставленная задача решается тем, что рентгеновское штативное устройство прецизионного линейного сканирования узкоколлимированным пучком γ-излучения в медицинской диагностике, включающее электропривод штатива, стойку, поддерживающую, по меньшей мере, одну направляющую с опирающейся на нее, по меньшей мере, одной опорой, при этом, по меньшей мере, одна опора поддерживает уравновешенный штатив на каретке штатива, поддерживающий рентгеновский излучатель, коллиматор и приемник излучения, при этом опора каретки штатива содержит нагрузку от устройства в виде упругого элемента, связывающего каретку штатива со стойкой, предлагается, кроме того, выполнить так, что стойка поддерживает, по меньшей мере, одну направляющую в виде шариковой направляющей с, по меньшей мере, одной опирающейся на нее линейной шариковой опорой, а упругий элемент, содержащий, по меньшей мере, одну деталь из стального профиля различной модификации, создает ею в опоре каретки штатива нагрузку в виде силы реакции Fст, которая снижает вибрацию штатива при его сканирующем движении от электропривода в виде бесконтактного электропривода созданием в опоре динамической жесткости с учетом, по меньшей мере, действия в опоре гравитационных сил от конкретного штатива в диапазоне изменения силы Fст.min - Fст.max и действия в опоре минимального значения знакопостоянной силы реакции Fmin в диапазоне изменения силы Fmin - Fmax, характеризующего нераскрытие стыка, при этом бесконтактный электропривод выполнен в виде комбинированного линейного двигателя, неподвижную часть которого, содержащую магнитопровод в виде статора, содержит стойка, подвижную часть, содержащую электромагнитное устройство в виде индуктора, содержит каретка штатива.
В решении задачи создания унифицированного устройства применяются взаимообусловленные в совместном использовании элементы сканирования и их синтез:
- шариковая направляющая с линейной шариковой опорой, воспринимающая без ограничения, по меньшей мере, гравитационную нагрузку при плавности хода и низком коэффициенте трения;
- устройство с упругим элементом, создающее в опоре каретки штатива силу реакции Fст с возможностью устанавливать, в условиях применения линейной шариковой опоры, без ограничения любое по величине требуемое значение;
- получение сканирующего движения штатива от бесконтактного электропривода, в том числе от электропривода в виде комбинированного линейного двигателя с использованием стойки и каретки штатива по новому назначению.
Это решение обеспечивает создание рентгеновского штативного устройства с унифицированным устройством линейного сканирования и приводит к осуществлению метода сканирования в отношении его применения к рентгеновским штативным устройствам: с поворотным рентгеновским стол-штативом, который предназначен для исследования пациента в различных положениях; со штативом с вертикальным положением стойки, который предназначен для исследования пациента в вертикальном положении стойки; со штативом с горизонтальным положением стойки, который предназначен для исследования пациента в горизонтальном положении стойки и для исследования молочной железы.
Управление бесконтактным электроприводом с применением микропроцессора также отвечает решению задачи в создании унифицированной системы управления, поскольку управление с параметрами электропривода осуществляется в шаговом режиме работы и отвечает требованиям прецизионной точности линейного сканирования с возможностью применения фарсировки в начале движения, торможения и реверса в устройстве с цифровым программным управлением.
Создание унифицированного прецизионного устройства линейного сканирования с применением бесконтактного привода с числовым программным управлением отвечает требованию системного подхода, управление при этом соответствует управлению в системе, составляющий элемент которого - человек-оператор. Такое решение соответствует требованиям к рентгеновскому штативному устройству с прецизионным линейным сканированием при оптимальном эргономическом качестве.
В рентгеновском штативном устройстве может использоваться бесконтактный привод в виде бесконтактного моментного привода, что расширяет применяемость в использовании бесконтактного привода при достижении одного и того же технического результата.
Стойка в рентгеновском штативном устройстве может поддерживать, по меньшей мере, одну шариковую направляющую с, по меньшей мере, одной опирающейся на нее линейной шариковой опорой, используемые для установки на опоре противовеса подвижной части рентгеновского штативного устройства. Такое уравновешивание штатива повышает плавность сканирующего движения.
Стойка рентгеновского штативного устройства может поддерживать, по меньшей мере, одну шариковую направляющую с, по меньшей мере, одной опирающейся на нее линейной шариковой опорой, используемые для перемещения каретки-стойки на каретке штатива в зону обследования пациента, при этом каретка-стойка в сканирующем движении штатива выполняет функцию стойки. Введение каретки-стойки позволяет снизить экономические затраты за счет уменьшения длины шариковых направляющих и уменьшения длины магнитопровода комбинированного линейного двигателя.
В штативном устройстве упругий элемент может создавать в опоре каретки штатива силу реакции Fст внутренней силой - натягом тел качения, что расширяет технологические возможности в получении силы реакции Fст.
На фиг. 1 показаны элементы кинематической и оптической схемы штативного устройства; на фиг. 2 показана схема использования упругого элемента и комбинированного линейного двигателя; на фиг. 3 показана диаграмма действия силы реакции F в опоре каретки штатива во временит τ сканирующего движения штатива; на фиг. 4 показана схема изменения направления внешней нагрузки от упругого элемента; на фиг. 5 показана схема установки каретки - стойки и противовеса; на фиг. 6 показана схема установки бесконтактного моментного привода.
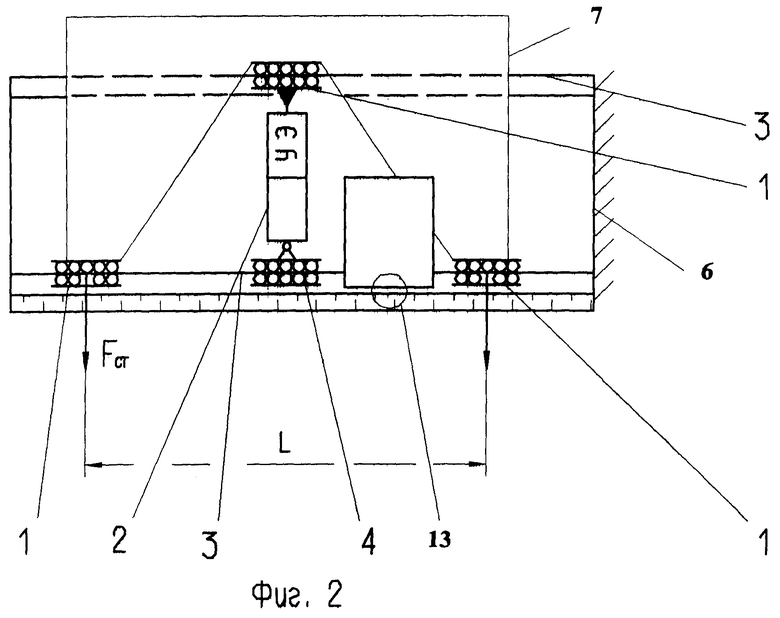
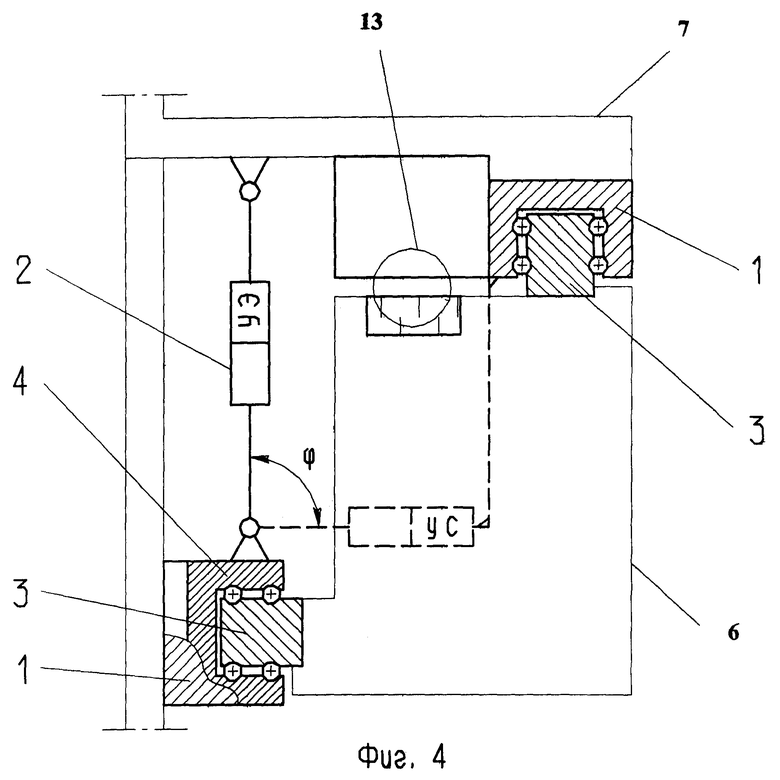
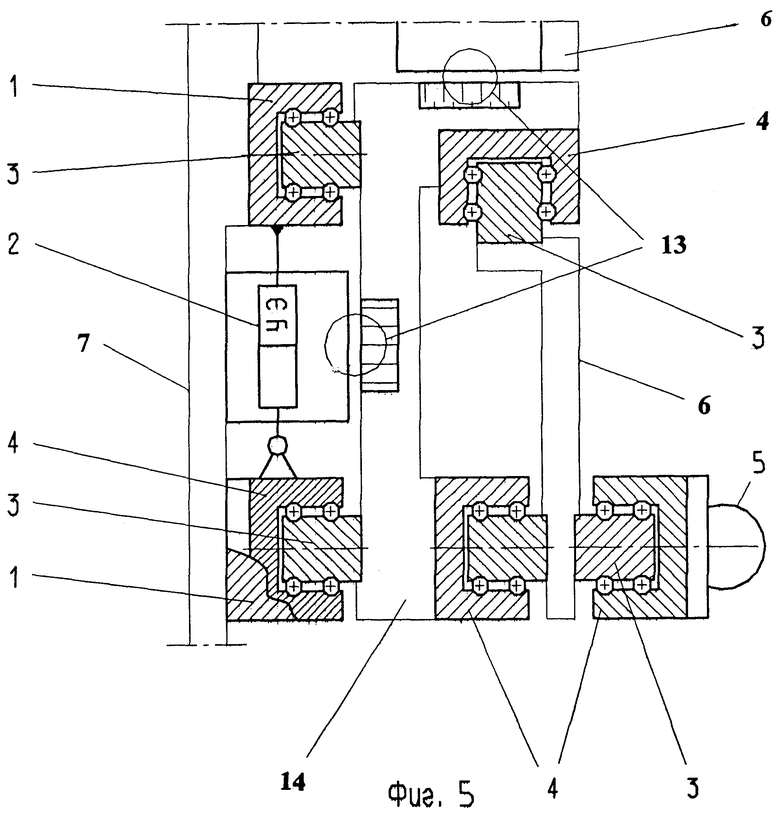
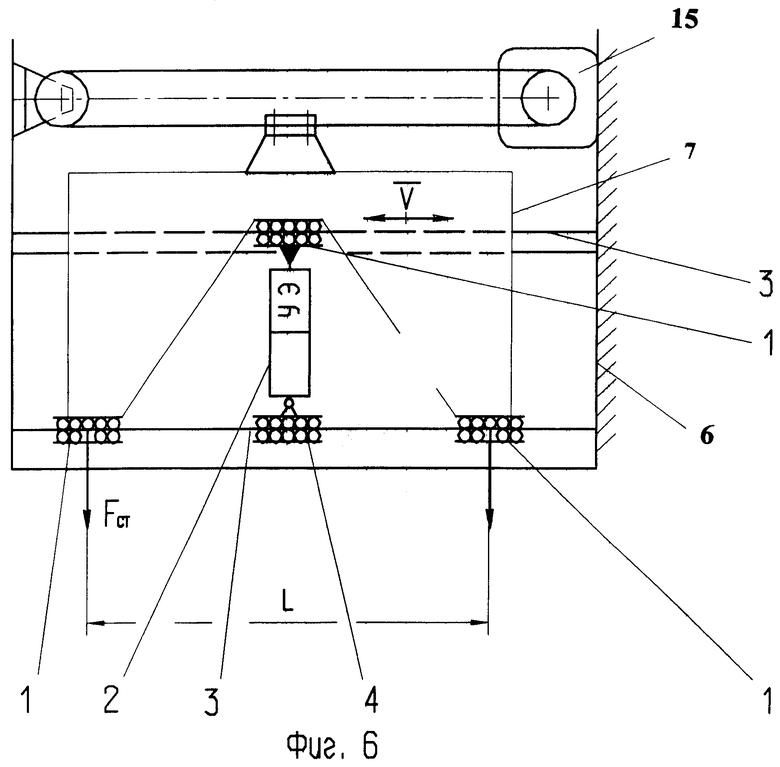
Устройство (фиг. 2, 4, 5, 6) содержит линейные шариковые опоры каретки штатива 1, упругий элемент 2, шариковые направляющие 3, линейную шариковую опору 4, противовес 5, стойку 6, каретку штатива 7, коллиматор 8, входную диафрагму 9, приемник излучения 10, рентгеновский излучатель 11, зону 12 для размещения пациента, привод 13 в виде комбинированного линейного двигателя. Устройство (фиг. 5) в частном случае выполнения может содержать каретку-стойку 14, двигатель (фиг. 6) в виде бесконтактного моментного привода 15.
На фиг. 1 показана стойка 6, поддерживающая каретку штатива 7 с расположенными на штативе источником γ-излучения, коллиматором 8, отстоящим от рентгеновского излучателя на L1, со щелью Н2 коллиматора 8, расходящимся пучком γ-излучения ϕ, приемником излучения 10 со щелью H1 входной диафрагмы 9, отстоящей от рентгеновского излучателя на L2, установочным углом θ приемника излучения относительно оптической оси.
Привод (на фигуре не показан) приводит штатив 7 в поступательное сканирующее движение - движение со скоростью V относительно пациента, размещенного в зоне 12.
На фиг. 2, 4, 5 показан комбинированный линейный двигатель 13, составляющими частями которого являются стойка 6, поддерживаемая шариковой направляющей 3, каретка штатива 7 на линейной шариковой опоре 1, содержащая ответную часть двигателя 13. Стойка 6 и каретка штатива 7 используются по новому назначению.
На фиг. 3 сила реакции в опоре каретки штатива F во время движения рентгеновского штатива τ находится во взаимосвязи с действием силы реакции Fст от упругого элемента, действием силы гравитации от конкретного рентгеновского штатива в диапазоне изменения силы Fmin - Fmax с обеспечением условия, при котором минимальное значение знакопостоянной силы Fmin в диапазоне изменения силы Fmin - Fmax характеризует условие Fmin >> 0.
На фиг. 4 показано изменение направления внешней нагрузки от упругого элемента 2.
На фиг. 5 показана стойка 6 с непоказанным на чертеже креплением к стойке шариковых направляющих 3 с опирающимися на них линейными шариковыми опорами 4, используемыми для перемещения каретки-стойки 14 и противовеса подвижной части штатива 5. Каретка-стойка 14 на шариковых направляющих поддерживает линейные шариковые опоры 1 каретки штатива 7.
На фиг. 6 деталь 16 в виде стального троса или ленты охватывает ведомый и ведущий шкивы, поддерживаемые стойкой 6, и закреплена с кареткой штатива 7.
Применение в опоре каретки внешней силы реакции Fст от упругого элемента УЭ по отношению к применению внутренней силы - от натяга тел качения более предпочтительно, поскольку сила реакции Fст от упругого элемента УЭ практически не зависит от износа шариковой опоры, что повышает безотказность устройства при увеличении срока службы. Кроме того, с износом опоры, изменением направления действия упругого элемента изменяют рабочую нагрузочную поверхность опоры, чем повышают технический ресурс.
В обеспечение точности сканирующего движения штатива, использование линейного двигателя предпочтительно по отношению к применению бесконтактного моментного привода, поскольку точность взаимного расположения стойки и каретки линейного двигателя гарантирована точностью исполнения направляющих и точностью их расположения, что резко упрощает монтаж устройства движения. Кроме того, использование линейного двигателя упрощает решения по дизайну, поскольку устройство движения не занимает дополнительного объема. Благодаря этому повышается надежность сканирующего движения. В штативном устройстве с малыми массогабаритными показателями, к примеру - штативном устройстве для маммографического рентгеновского аппарата, использование бесконтактного моментного привода более предпочтительно, поскольку в этом аппарате резко уменьшена масса штатива и длина гибкой связи; а простое устройство движения при простом монтаже не снижает требований к сканирующему движению.
На фиг. 2, 4, 5 и 6 показан упругий элемент 2 (УЭ), связывающий каретку штатива 7 со стойкой 6 (кареткой - стойкой 14) через линейную шариковую опору 4. Упругий элемент представляет собой устройство, не показанное на фигурах, содержащее множество стальных проволочек, стальных лент, других профилей и конфигураций деталей из стали, которые при деформации создают в опоре каретки штатива силу реакции Fст. Примером возможности осуществления такого устройства может служить устройство с винтовым механизмом точного движения гайки, в котором винт закреплен от осевого смещения на опоре 4. Вращаясь, винт перемещает в поступательном движении гайку в зацепе с пружинами растяжения, имеющими с противоположной стороны зацеп с кареткой штатива и воспринимающими продольно-осевую нагрузку от каретки штатива к опоре с возможностью перемещения по линейной направляющей вдоль стойки. Благодаря большому масштабу соотношения поворота винта к поступательному перемещению гайки и возможности получения высокой точности при простой конструкции настраивают в опоре силу реакции Fст.
Рентгеновское штативное устройство с унифицированным решением прецизионного сканирования пациента пучком γ-излучения имеет применение в рентгенотехнике в производстве цифровых рентгенографических установок с широким спектром штативных устройств и с широким спектром методов регистрации γ-квантов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕНТГЕНОВСКИЙ СТОЛ-ШТАТИВ ПОВОРОТНЫЙ | 2000 |
|
RU2202953C2 |
| ЦИФРОВОЙ СКАНИРУЮЩИЙ РЕНТГЕНОДИАГНОСТИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2217055C1 |
| СПОСОБ ДОСМОТРА И ДОСМОТРОВЫЙ КОМПЛЕКС | 2012 |
|
RU2512679C1 |
| СТОЙКА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕНТГЕНОВСКОГО АППАРАТА | 2014 |
|
RU2567276C1 |
| РЕНТГЕНОГРАФИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 2009 |
|
RU2407439C1 |
| РЕНТГЕНОГРАФИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 2003 |
|
RU2233117C1 |
| ОДНОПРОЕКЦИОННЫЙ СКАНИРУЮЩИЙ РЕНТГЕНОВСКИЙ АППАРАТ С ОСЦИЛЛИРУЮЩИМ ПО ЭНЕРГИИ ПУЧКОМ ПИРАМИДАЛЬНОЙ ФОРМЫ (ВАРИАНТЫ) | 2010 |
|
RU2452141C2 |
| ДИАГНОСТИЧЕСКИЙ РЕНТГЕНОГРАФИЧЕСКИЙ СКАНИРУЮЩИЙ ЦИФРОВОЙ АППАРАТ | 2006 |
|
RU2328217C2 |
| СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 1998 |
|
RU2172137C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СКАНИРУЮЩЕГО РЕНТГЕНОВСКОГО ПУЧКА ПИРАМИДАЛЬНОЙ ФОРМЫ (ВАРИАНТЫ) | 2009 |
|
RU2393653C1 |
Изобретение относится к области медицины и может быть использовано в рентгенотехнике. Техническим результатом является повышение надежности. Изобретение содержит привод, стойку с опорой, на опоре расположен штатив, поддерживающий рентгеновский излучатель, коллиматор, приемник излучения, линейная шариковая опора каретки штатива содержит нагрузку, привод выполнен бесконтактным моментным или содержит комбинированный бесконтактный линейный двигатель, подвижную часть которого содержит каретка штатива, а стойка содержит его неподвижную часть. 2 з.п.ф-лы, 6 ил.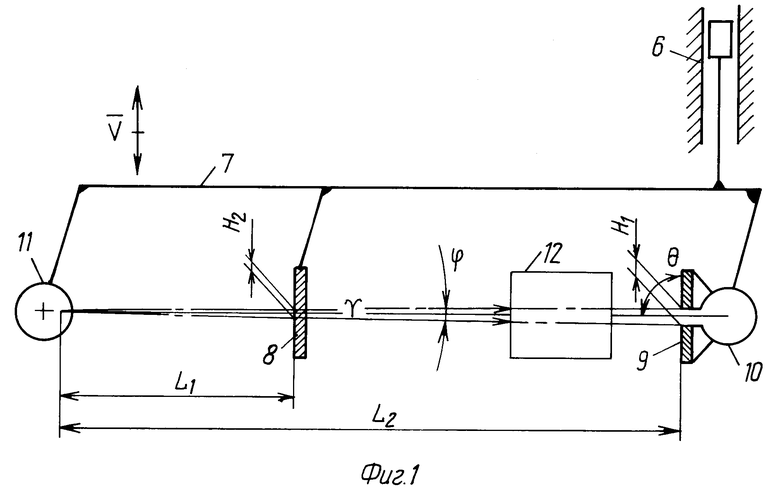
| US 4208586 A, 17.06.1980 | |||
| Способ вычислительной томогра-фии и ТОМОгРАф для ЕгО РЕАлизА-ции | 1979 |
|
SU807173A1 |
| Рентгеновский штатив | 1977 |
|
SU655387A1 |
| Рентгенодиагностическая установка | 1976 |
|
SU692603A1 |
| US 4481656 A, 06.11.1984 | |||
| US 4387468 A, 07.06.1983. | |||

