1
Изобретение относит.ся к рентгеновской вычислительной томографии.
Известны вычислительные томографы, в которых производится линейное сканирование исследуемого объекта узким пучком рентгеновского излучения при линейном перемещении источника и детектора и последовательный поворот сборки источник-детектор после каждого цикла сканирования на заданный угол 11.
Также известны вычислительные томографы, в котогрых используется источник с расходящимся.веерным пучком и набор детекторов, охватывающий угловой диапазон веерного пучка, причем в этих томографах также осущест,вляется сканирование узким пучком за счет введения между источником и объектом (или между объектом и детекторами) подвижных щелевых коллиматоров 2} .
Такие томографы характеризуются большим временем исследования из-за сложного характера дв 1жения.
Известны томографы, в которых производят вращение сборки, содержащие источник широкорасходящегося веерного пучка и матрицу детекторов вокруг исследуемого тела 3.
. Также известны томографы, которые содержат кольцевую матрицу детекторов и источник веерного пучка, причем матрица детекторов неподвижна, а источник вращается вокруг исследуемого тела внутри кольца детекторов .4.
Недостатком таких устройств является необходимость использования
0 :большого количества детекторов,вследствие чего повышается стоимость устройства, усложняется процесс его настройки и падает надежность работы.
5
Кроме того, в томографах с совмест ным вращением источника и детекторов необходимо использовать импульсное излучение, что усложняет систему питания источника.
0
Наиболее близким по технической сущности к предлагаемому является способ вычислительной томографии, заключающийся в том, что объект сканируют узким пучком рентгеновского из5лучения в заданном угловом диапазоне, регистрируют прошедшее через объект излучение с помсадью набора детекторов, производят поворот источника и детекторов вокруг исследуемого объекта,
0 производят преобразование зарегистрированных сигналов и их обработку в ЭВМ для восстановления изображения слоя исследуемого объекта.
Томограф для реализации указанног
способа содержит источник веерного рентгеновского пучка, поворотную опору источника, вращающийся обтюратор с равномерно распределенньйми по его окружности щелями, установленный вокруг источника, привод вращения обтюратора, держатель исследуемого объекта, набор детекторов в виде удлиненной ионизационной камерл, неподвижной относительно излучателя, кольцо с коллимационными отверстиями вращающееся вокруг объекта, средства поворота источника и набора детекторов в виде отдельного двигателя, схему регистрации и преобразования сигнлов детекторов и ЭВМ 5.
Недостаток известного техническог решения- заключается в сложности системы коллимации и детектирования излчения.
Цель изобретения - упрощение систмы детектирования излучения.
Поставленная цель достигается тем что в способе вычислительной томографии, заключающемся в том, что ис следуел«лй объект сканируют узким пучком рентгеновского излучения в заданном угловом диапазоне, регистрируют прошедшее через объект излучение с помощью набора детекторов, производят поворот источника и детекторов вокруг исследуемого объекта,прюизводят преобразование зарегистрированных сигналов и их обработку в ЭВМ для восстановления изображения слоя исследуемого объекта, регистрацию излучения производят с помощью дискретного набора детекторов, равномерно распределенных по окружности вокруг исследуемого объекта; осуществляют независимое от поворота источника вращение набора детекторов вокруг исследуемого объекта, причем отношение угловой скорости вращения набора детекторов и скорости углового сканирования выбирают равным SeoJ/o -n-) ,, где oi - угловой диапазон сканирования, am- количество да- . тектор.ов в наборе.
При этом в томографе для реешизации способа вычислительной томографии , содержащем источник веерного рентгеновского пучка, поворотную опору источника, вращающийся обтюратор с равномерно распределенными по его окружности щелям}5, установленный вокруг источника, привод вращения обтюратора, держатель исследуемого объекта, набор детекторов, средства поворота источника к детекторов вокруг исследуемого объекта, схему регистрации и преобразования сигна лов детекторов и ЭВМ,детекторы установлены дискретно на кольцевой опоре Средства поворота источника и детекторов выполнены в виде независимых
приводов поворота источника и вращения кольцевой опоры с детекторами, причем в томограф введены средства согласования угловых скоростей вршдения и угловых положений обтюратора и кольцевой опоры с детекторами.
Кроме того, количество детекторов в наборе равно шести.
Кроме того, радиус кольцевой опоры с детекторами меньше радиуса окружности поворота источника.
Кроме того, радиус кольцевой опоры с детекторами, а также средства согласования установлены на поворотной опоре источника.
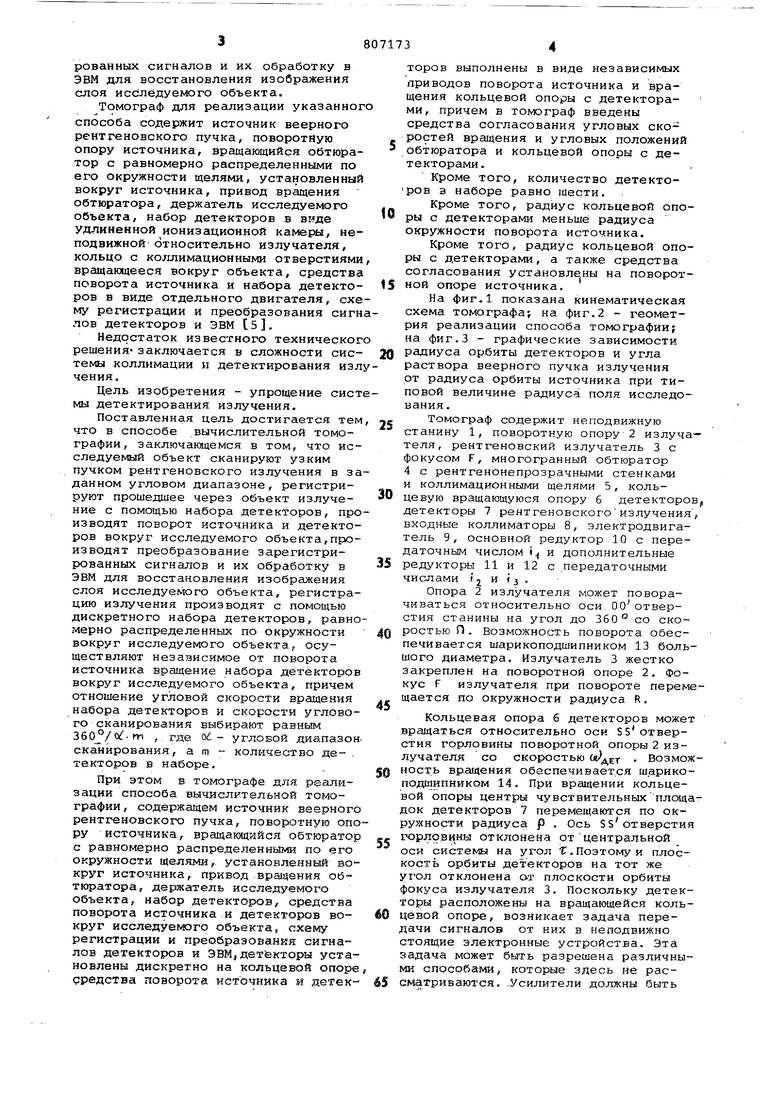
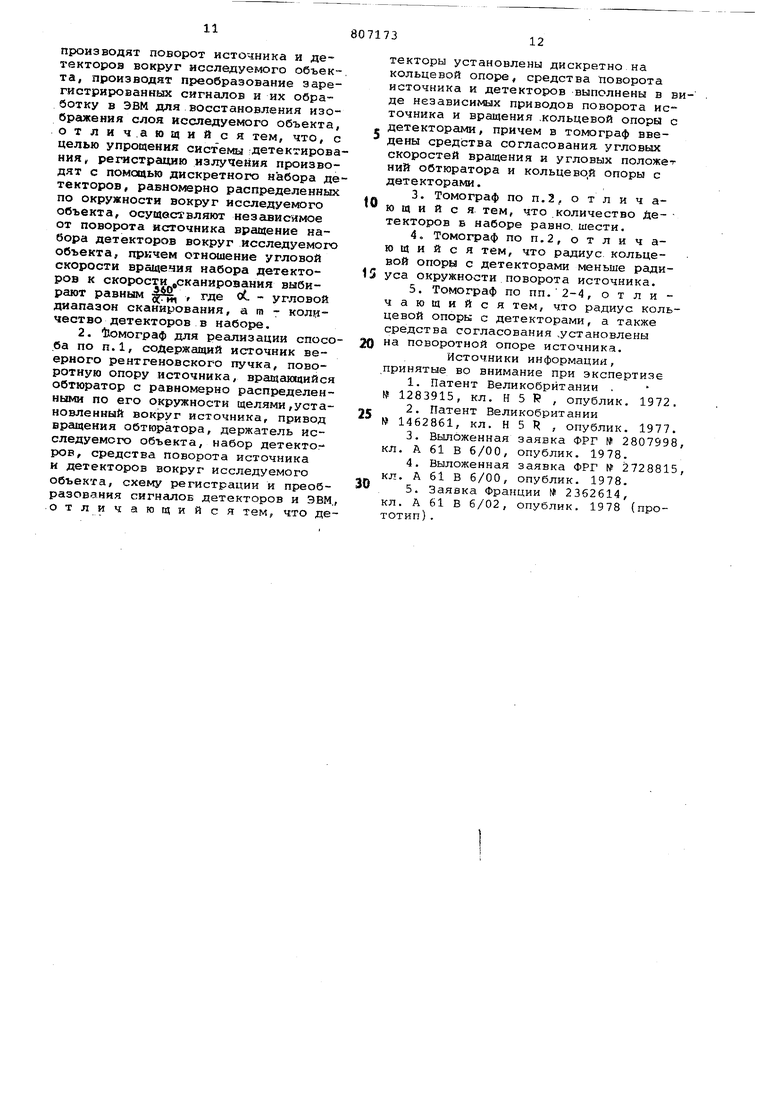
На фиг.1 показана кинематическая схема томографа; на фиг.2 - геометрия реализации способа томографии; на фиг.З - графические зависимости радиуса орбиты детекторов и угла раствора веерного пучка излучения от радиуса орбиты источника при типовой величине радиуса поля исследования.
Томограф содержит неподвижную станину 1, поворотную опору 2 излуча теля, рентгеновский излучатель 3 с фокусом F, многогранный обтюратор 4 с рентгенонепрозрачными стенками и коллимационными щелями 5, кольцевую вращающуюся опору 6 детекторо детекторы 7 рентгеновскогоизлучения входные коллиматоры 8, электродвигатель 9, основной редуктор 10 с передаточным числом i и дополнительные редукторы 11 и 12 с передаточными числами -1 2 и « 3
Опора 2 излучателя может поворачиваться относительно оси. ООотверстия станины на угол до 360° со скоростью П. Возможность поворота обеспечивается шарикоподшипником 13 большого диаметра. Излучатель 3 жестко закреплен на поворотной опоре 2. Фокус F излучателя при повороте перемщается по окружности радиуса R,
Кольцевая опора б детекторов може вращаться относительно оси SS отверстия горловины поворотной опоры 2 излучателя со скоростью Возмоность вращения обеспечивается шарикоподйшпником 14. При вращении кольцевой опоры центры чувствительных площдок детекторов 7 перемещаются по окружности радиуса р . Ось Ssотверсти 1Ч)рлови ны отклонена отцентральной оси систегиы на угол Т. Поэтому и плоскость орбиты детекторов на тот же угол отклонена от плоскости орбиты фокуса излучателя 3. Поскольку детекторы расположены на вращающейся кольцевой опоре, возникает задача передачи сигналов от них в неподвижно стоящие электронные устройства. Эта задача может быть разрешена различными способами, которые здесь не рассматриваются, .Усилители должны быть
расположены рядо,-л с детекторами так чтобы далее передавались усиленные сигналы.
Электродвигатель 9 установлен на поворотной опоре 2 излучателя. Благодаря этому схема привода вращаю1аихся частей томографа значительно упрощена, а масса излучателя и обтюратора частично уравновешена массой двигателя. Подача напряжения питания на электродвигатель осуществляется гибким кабелем, который- образует один виток, поскольку опора.2 совершает только один оборот. Вращающий момент от двигателя передается через -понижающий основной червячный редуктор 10 к зубчатому колесу станины 1 и через редуктор 10 и дополнительный понижагаций редуктор 11 к зубчатому колесу кольцевой опоры 6 детекторов.
Стенкимногогранного обтюратора 4 изготовлены из свинца и имеют узкие калиброванные щели, с помощью которых из веерообразного пучка с углом раствора ( формируются колимированные лучи. Обтюратор приводится во вращение со скоростью Л)ПБТ повышающим редуктором 12 с передатоным числом i ,j, который получает вращающий момент от зубчатого колеса горловины станины 1 при повороте опоры 2 излучателя относительно станины.
Передаточные числа всех редукторов определяются следующими соотношениями:
от двигателя к излучателю
ii-Чв/иэА 0/( от двигателя к детекторам
Ч ЧВ/ДЕТ от двигателя к обтюратору
-з АВ /ОБТ ,ъ; от детекторов к обтюратору
т
aSL :li.
Ч- АЕТ/05Т AET i г
где m - число детекторов,-п - число щелей в обтюраторе, которое равно 36oVoc, где oL - раствор -веерного пучка, который определяет угловой интервал сканирования.
В состав томографа входят также серийные аналого-цифровой преобразователь, ЭВМ и устройства представления синтезированного при помощи ЭВМ изображения. Все перечисленные средства являются типовыми и далее не рассматриваются.
Для обеспечения непрерывности съема измерительных данных сканирование осуществляется не одним, а несколькими детекторами , расставленньпчи по окружности с равномерным шагом так, что при уходе одного детектора из зоны измерения в нее поступает
следующий. Оптимальное число детекторов равно шести. При меньшем их числе и реальных соотношениях между диаметрами поля Исслер/вапия орбиты вращения излучателя и орбиты вращения детекторов остаются зоны холостого пробега, а большее число нежелательно.
Радиус Р орбиты детекторов берется меньшим, чем радиус R орбиты излучателя потому, что упрощается кинемати0
ческая схема привода детекторов, по сравнению со случаем, когда р R/ и уменьшается момент инерции детекторов, что важно, поскольку их приходится вращать в несколько раз быстрее
5 излучателя. Кроме того, так как детекторы оказываются ближе к объекту, чем излучатель, то уменьшаются геометрические полутени в направлении, перпендикулярном плоскости вращения
0 детекторов, и сокращаются габаритные размеры устройства.
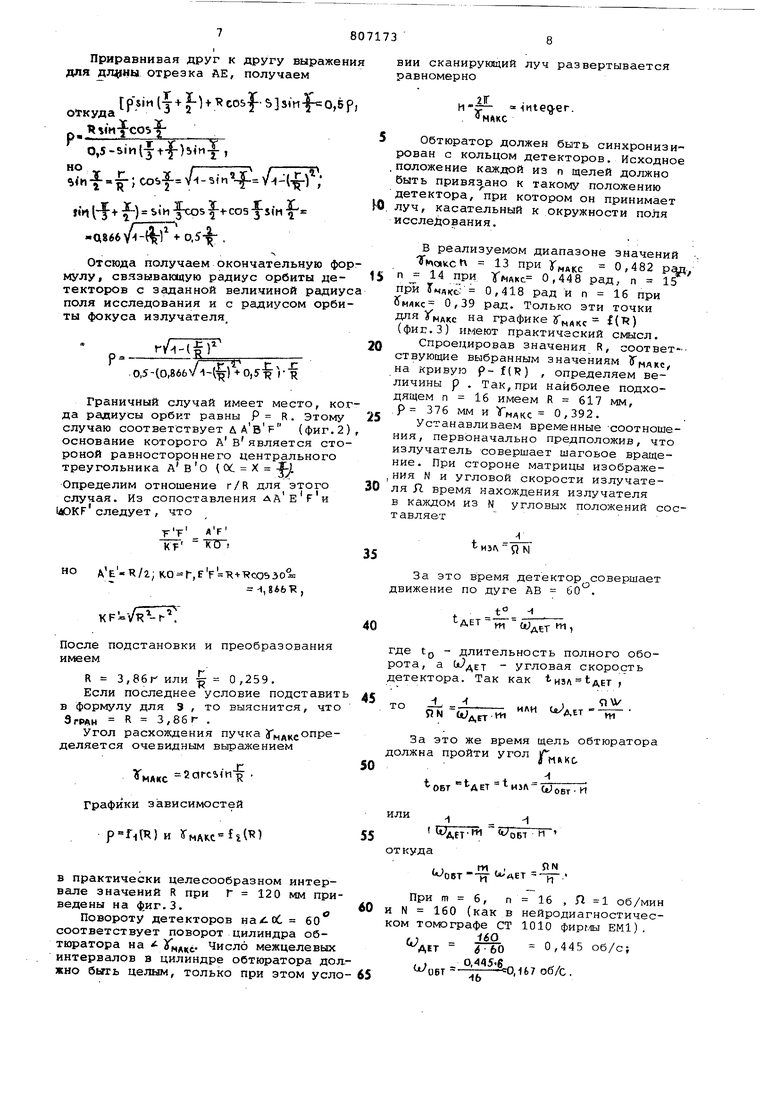
Так как радиус поля исследования для томографа является величиной заданной, необходимо знать зависимость между радиусами орбит излучателя (R) и детекторов ( р) при числе детекторов m б. Излучатель с фокусом в точке F формирует веерообразn ный рентгеновский пучок с углом расхождения (дцс охватывающим круглое поле исследования радиусом г (фиг.2). Граничные лучи пучка CF и DF пересекаются с орбитой детекторов в точках
А и в. Через эти же точки проходят отрезки АО и ВО, являющиеся сторонами угла оС бО. Отрезок АЕ одновременно входит в ДАЕО идАЕР.
Из треугольника ЛЕО имеем АЕ О.й; АО О,5 f.
Из треугольника AEF имеем АЕ AF , но AF АК KF, где ДК .р . sin п -ty - f), кг тгсоь.
Рассмотрим соотношения между углами:
1. Из треугольника КОС
-bf.
откуда
2. Из треугольников FOK, КОС И
СОН
1-- Г,
27
5
поставив f из предыдущего уравнения в последнее, получаем lf -
3. Аргумент синуса в формуле для АК равен
,0 X. S Y«JC- i-.
n-iT-T T i 3 2
Учитывая последний результат, мы записываем
(|).
5 Приравнивая друг к другу выраж для отрезка АЕ, получаем Psin(T+J-) + co5f-5J3m-f 0 откуда J ,5-siM(3-t-f ), и1-: ;соф7.-..-. ini-f -f) siHfcosf -co5 j( «авббу - т о- Отсюда получаем окончательную мулу, связывающую радиус орбиты д текторов с заданной величиной рад поля исследования и с радиусом ор ты фокуса излучателя. (|) ,,о,у)-0,5-(0,866 Граничный случай имеет место, да радиусы орбит равны Р R. Это случаю соответствует ддвр (фиг основание которого А вявляется с роной равностороннего центральног треугольника А в о ( ОС X -J Определим отношение г/К для этого случая. Из сопоставления AAEF и I4DKFследует , что Г т л р K-F ТТГг но At-R/a; K,o-r,fV -R-vT co5.30 ,%tbR , ВИИ сканирующий луч развертывается равномерно iHteg.er. Обтюратор должен быть синхронизирован с кольцом детекторов. Исходное положение каждой из п щелей должно быть привя: ано к такому положению детектора, при котором он принимает луч, касательный к окружности поля исследования. В реализуемом диапазоне значений Умсхкс 13 при Умдкс 0,482 р, п 14 при ((НАкс 0,448 рад, п 15 при Умдкс- 0,418 рад и п 16 при 0,39 рад. Только эти точки для /МАКС на графике гГнлкс fC) (фис.З) имеют практический смысл. Спроецировав значения R, соответ ствующие выбранным значениям на кривую Р- f(R) , определяем величины р . Так,при наиболее подходящем п 16 имеем R 617 мм, Р 376 мм и Гмлкс 0,392. Устанавливаем временные соотношения, первоначально предположив, что излучатель совершает шаговое вращение. При стороне матрицы изображеНИЛ N и угловой скорости излучателя Я время нахождения излучателя в каждом из N угловых положений сосавляетиэл-Q м За это время детектор совершает вижение по дуге АВ 60 .


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 1998 |
|
RU2172137C2 |
| Способ вычислительной радиационной томографии | 1978 |
|
SU766264A1 |
| РАДИАЦИОННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ ИНТРОВИБРОВИЗОР | 1992 |
|
RU2146814C1 |
| ПОЛУЧЕНИЕ КОМПЬЮТЕРНО-ТОМОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2007 |
|
RU2452385C2 |
| Устройство для осевой томографии | 1977 |
|
SU650521A3 |
| Способ вычислительной рентгеновской томографии и рентгеновский томограф для осуществления способа | 1979 |
|
SU857815A1 |
| Эмиссионно-трансмиссионный вычислительный томограф | 1983 |
|
SU1153885A1 |
| УЛЬТРАМАЛОУГЛОВАЯ РЕНТГЕНОВСКАЯ ТОМОГРАФИЯ | 1998 |
|
RU2145485C1 |
| СКАНИРОВАНИЕ В СКВОЗНОМ РЕЖИМЕ | 2007 |
|
RU2452384C2 |
| ПРОМЫШЛЕННЫЙ ТОМОГРАФ | 2010 |
|
RU2431825C1 |



После подстановки и преобразования имеем
R 3,861- или 0,259.
Если последнее условие подставит в формулу для 3 , то выяснится, что 9 ГРАН - 3,86 г .
Угол расхождения пучка Уц д -определяется очевидным выражением
YMAKC -sarcn-nf . Графики зависимостей )и JfMAKC-fni)
в практически целесообразном интервале значений R при Г 120 мм приведены на ф,иг.З.
Повороту детекторов 60 соответствует поворот цилиндра обтюратора на Гщлке. Число межцелевых интервалов в цилиндре обтюратора дол-жно быть целым, только при этом услогде tp - длительность полного оборота, а - угловая скорость детектора. Так как ti
ИЗЛ tдET ,
° (;5;;;гй IXV/
ж
За это же время должна пройти угол
ОБТ
ИЛИ
/ , m , , ON
-05Тpf --pp.
м. , П 16 , Д 1 Об/мин
И N 160 (как в нейродиагностическом толюграфе СТ 1010 фирмы ЕМ1) i6O
а
ДЕТ 4-60 0,445 об/с;
, 167 об/с, to Скорости oъ вполне допустимую величину. За время прохождения детектором дуги АВ (угла ОС) с детектора снимаю ся N показаний. Поэтому на каждый отдельный замер излучения детекторо приходится время (С) При 0,445 об/с и N. 160 По полученным выше формулам опре деляем передаточные числа редукторов для выбранных конструктивных па раметров, полагая а)дв 25 об/с: Ч 1: i 1 : 1500; 150; , Ш..|.„о,. Чтобы детектор, попадающий на не рабочем участке орбиты (дуга WW } в угол раствора излучения затенял излучение, орбита детекторов должна быть отклонена от орбиты изл чателя на угол i таким образом, что конец луча FV в любом положении в пределах гГидкс попадална чувствительную площадку детектора (фиг.26 Если вертикальный луч FE попадает в центр этой площадки, то луч FB при повороте детектора относительно центрального положения на 30 попадает в точку В. Смещение конца луча по приемной плоскости детектора рав но отрезку РВ EZsmt .Величина уг T выбирается такой, чтобы пассивны детекторы, движущиеся в пределах у раствора пучка, не затеняли излучен Если полутолщина пучка равна Cf/2, полуширина детектора с арматурой b/2 и интервал надежности - С , т . . Из л Г15 Z смещение луч определится как .,т, h ,, -Ь (2+тг-- -с), 2р ip f,pH-C0530)-OH34p. тогда РВ 0,067lf- t). Если а/2 7 ММ-, в/2 12 мм и мм, то РВ «1/.6 мм, т.е. детектор с чувствительной площадкой шириной 14 мм смещения луча не почувствует.
У гол 1 arcs Поскольку центры орбит излучателя и детекторов не совпадают, длина луча до встречи с детектором при движении луча по дуге АВ изменяется. Рассмотрим А OVF, в котором заданы стороны OF R , OV Р и угол -f- , рас- 65
изобретения
Формула 60 оложенный против стороны ov . спользуя теорему синусов, можно на-, исать L Fv liillH2r psm(ir-|-ctrcsm «.т Pcos(,-f-|-Qf-csiH) Угол- представляет собой текущий гол между осью вырезанного обтюраора луча и осью симметрии системы Фиг. 2 ),Полный угол Т изменяется в ределах угла расхождения исходного учка ТМАКС При - О, т.е. при совпадении луча с осью симметрии L Р + R или при Р . 376 и мм L 993 мм, при-f f 0,195 рад, р 376 мм и R 617 мм L,j 960 .мм. Изменение длины луча не превышает, таким образом, 3,5%. При необходимости это изменение может быть скомпенсировано в процессе машинного синтеза изображения. Фактически его роль незначительна, такч. как изменение происходит главным образом в воздухе, а не в плотных тканях. Предлагаемый томограф обладает следующими достоинствами; а) в нем используются только вращательные движения, вследствие чего кинематическая схема упрощена; - б) с относительно большой скоростью (0,4 - 0,5 об/с) вращается только кольцо с детекторами, масса и радиус этого устройства относительно невелики; в)томограф содержит милимальное число детекторов рентгеновского излучения и электронных трактов, определяемое только условием непрерывности сканирования; г)излучатель томографа может работать на непрерывном излучении от более дешевого питающего устройства, чем импульсное. В случае необходимости для повышения точности томографа можно осуществлять электронное стробирование сигналов с детекторов. 1. Способ вычислительной томографии,заключа1ацийся в том, что исследуемый объект сканируют узким пучком рентгеновского излучения в заданном угловом диапазоне, регистрируют прошедшее через объект излучение с помощью набора детекторов,
производят поворот источника и де тектороа вокруг исследуемого объекта, производят преобразование эарегистрированньах сигналов и их обработку в ЭВМ для восстановления изображения слоя исследуемого объекта, отличающийся тем, что, с целью упрощения системы детектирования , регистрацию излучения производят с пометь дискретного набора детекторов, равномерно распределенных по окружности вокруг исследуемого объекта, осуществляют независимое от поворота источника вращение набора детекторов вокруг исследуемого объекта, причем отношение угловой скорости вращения набора детекторов к скорости .сканирования выбирают равным , где оС - угловой диапазон сканирования, am- количество детекторов в наборе.
текторы установлены дискретно.на кольцевой опоре, средства поворота источника и детекторов выполнены в вде независимых приводов поворота источника и вращения .кольцевой опоры с детекторами, причем в томограф введены средства согласования угловых скоростей вращения и угловых положат НИИ обтюратора и кольцевой опоры с детекторами.
4« Томограф поп.2,отличаю щ и и с я тем, что радиус кольцевой опоры с детекторами меньше радиуса окружности поворота источника.
Источники информации, принятые во внимание при экспертизе
№ 1283915, кл. HSR, опублик. 1972
1462861, кл. Н 5 R ., опубяик. 1977
кл.
тотип) .
ь § § §
5{ 5 5 5 3 « 5 «S Sf
