Изобретение относится к технике автономной ориентации и может быть использовано при определении ориентации стационарных объектов относительно Земли.
Наиболее известным магнитным ориентатором является магнитный компас [В. Ф. Кузнецов. Навигация. - М.: Морской транспорт, 1956. - стр. 69], недостаток которого - низкая точность определения магнитного меридиана. Наиболее близким по техническому исполнению к предложенному устройству является самоориентирующийся гиростабилизатор гирокомпасного типа [Г.А. Хлебников. Начальная выставка инерциальных навигационных систем. - М.: Военная академия им. Ф.Э. Дзержинского, 1994. - рис. 7.7., стр. 308], содержащий вращающееся основание, установленное в трехосном кардановом подвесе, три двигателя, три датчика углов и каналы ориентирования (с акселерометрами в качестве чувствительных элементов).
Недостатком данного ориентатора является невозможность обеспечения устойчивого положения осей прибора при решении задачи ориентирования, что приводит к низкой точности измерений. Заявленное изобретение направлено на решение задачи повышения точности пространственного ориентирования стационарных объектов относительно направлений горизонтальной и вертикальной составляющих вектора напряженности геомагнитного поля Земли.
Подобная задача возникает при проведении топогеодезических работ, в морской навигации, при определении ориентации космических объектов и т.д.
Сущность изобретения состоит в том, что в устройство введены источник когерентного излучения, оптический разветвитель, канал ориентирования, каждый из каналов ориентирования содержит управляемый оптический фазовый модулятор, неуправляемый оптический фазовый модулятор, оптический объединитель, дифференциатор, два компаратора, элемент ИЛИ-НЕ, ключ, выход источника излучения подключен ко входу оптического разветвителя, первое и второе оптические разветвления которого подключены ко входам канала горизонтального ориентирования, третье и четвертое оптические разветвления которого подключены ко входам первого канала вертикального ориентирования, пятое и шестое оптические разветвления которого подключены ко входам второго канала вертикального ориентирования, выходы каналов ориентирования подключены ко входам управления двигателями, в каждом канале ориентирования выходы пары оптических разветвлений оптического разветвителя подключены ко входам управляемого оптического фазового модулятора и неуправляемого оптического фазового модулятора, выходы обоих оптических фазовых модуляторов подключены ко входам оптических ответвлений оптического объединителя, выход которого подключен ко входу фотоприемника, выход которого подключен ко входу первого компаратора и входу дифференциатора, выход которого подключен ко входу второго компаратора, входы элемента ИЛИ-НЕ соединены с инверсным выходом второго компаратора и с прямым выходом первого компаратора в канале горизонтального ориентирования и первом канале вертикального ориентирования (во втором канале вертикального ориентирования - с инверсным выходом первого компаратора), выход элемента ИЛИ-НЕ подключен к управляющему входу ключа, информационный вход которого объединен со входом питания двигателя, выход ключа является выходом канала, а выходами устройства являются выходы датчиков углов, установленных по осям карданова подвеса.
Сущность изобретения поясняется фиг. 1, фиг. 2, где представлены функциональные схемы магнитооптического ориентатора (МО) и канала ориентирования.
МО содержит источник когерентного излучения 1, оптический разветвитель 2, канал горизонтального ориентирования (КГО) 31, канал вертикального ориентирования 1 (КВО1) 32, канал вертикального ориентирования 2 (КВО2) 33, вращающееся основание 4, двигатели горизонтального канала 51, вертикального канала 1 - 52, вертикального канала 2 - 53, датчики углов 61, 62, 63, трехосный карданов подвес 7. Каналы 31, 32 и 33 выполнены идентично.
Вращающееся основание 4 установлено в трехосном кардановом подвесе 7, который обеспечивает возможность его пространственного вращения с помощью двигателей 51, 52, 53. На основании 4 размещены источник когерентного излучения 1, оптический разветвитель 2, КГО 31, KBО1 32 и КВО2 33. Выход источника излучения 1 подключен ко входу оптического разветвителя 2, оптические разветвления 21 и 22 которого подключены ко входам КГО 31, оптические разветвления 23 и 24 - ко входам KBО1 32, a оптические разветвления 25 и 26 - ко входам КВО2 33. Выходы каналов ориентирования 31, 32, 33 подключены ко входам управления двигателями 51, 52, 53 соответственно. Выходами МО являются выходы датчиков углов 61, 62, 63, установленных по осям карданова подвеса 7.
На фиг. 2 приведена функциональная схема канала ориентирования 3i, i = 1, 2, 3. Канал ориентирования 3i, i = 1, 2, 3 содержит управляемый оптический фазовый модулятор (ОФМ) 81, неуправляемый ОФМ 82, оптический объединитель 9, фотоприемник (ФП) 10, дифференциатор 11, компараторы 121 и 122, логический элемент ИЛИ-НЕ 13, ключ 14.
В качестве управляемого ОФМ 81 могут быть использованы различные магниточувствительные оптические элементы, например: невзаимные элементы [Бычков С. И. и др. Лазерный гироскоп. - М.: Советское радио, 1975. - стр. 207] , чувствительные к магнитному полю; оптические элементы, построенные на основе использования магнитооптических эффектов Керра, Фарадея [Гонда С., Сэко Д. Оптоэлектроника в вопросах и ответах: Пер. с япон.- Л.: Энергоатомиздат, 1989. - стр. 28] (показатель преломления которых изменяется в зависимости от проекции вектора магнитного поля на оси чувствительности этих элементов (на фиг. 1 показано расположение каналов 31, 32 и 33, направления осей чувствительности которых взаимоперпендикулярны и указаны стрелкой )) и т. д. ОФМ 82 может быть выполнен в виде оптически прозрачной пластины постоянной толщины, осуществляющей сдвиг фазы оптического потока на π.
Выход оптического разветвления 21 подключен ко входу управляемого ОФМ 81, а выход оптического разветвления 22 подключен ко входу неуправляемого ОФМ 82. Выходы ОФМ 81, 82 подключены к входам оптических ответвлений оптического объединителя 9, выход которого подключен ко входу фотоприемника 10. Выход ФП 10 подключен ко входу дифференциатора 11 и входу компаратора 121. Выход дифференциатора 11 подключен ко входу компаратора 122, инверсный выход которого подключен к первому входу логического элемента ИЛИ-НЕ 13, второй вход которого соединен с выходом компаратора 121 (единственной отличительной особенностью канала 33, в сравнении с каналами 31 и 32, является соединение второго входа логического элемента ИЛИ-НЕ 13 не с прямым, а с инверсным выходом компаратора 121). Выход логического элемента ИЛИ-НЕ 13 подключен к управляющему входу ключа 14, на информационный вход которого подается напряжение питания двигателя 51; выход ключа 14 является выходом канала 3i, i = 1, 2, 3.
Устройство работает следующим образом. Основание 4 в начальный момент времени ориентировано произвольно. Когерентный оптический поток с выхода источника излучения 1 поступает на вход оптического разветвителя 1, где разветвляется на оптические потоки с равными единичными интенсивностями, поступающие соответственно на входы каналов 31, 32 и 33. Работа каналов 31, 32 идентична, работа канала 33 отличается незначительно, поэтому сначала рассмотрим работу КГО 31, с последующим выделением особенности работы канала 33. В канале 31 когерентные оптические потоки поступают на входы ОФМ 81 и 82. В управляемом ОФМ 81 происходит сдвиг фазы Φг оптического потока, пропорциональный проекции вектора напряженности магнитного поля Земли  (горизонтальной составляющей HГ) на ось чувствительности данного ОФМ 81, в неуправляемом ОФМ 82 - сдвиг фазы на π. В оптическом объединителе 9 эти потоки суммируются, формируя на входе фотоприемника 10 интерференционную картину с интенсивностью светового потока
(горизонтальной составляющей HГ) на ось чувствительности данного ОФМ 81, в неуправляемом ОФМ 82 - сдвиг фазы на π. В оптическом объединителе 9 эти потоки суммируются, формируя на входе фотоприемника 10 интерференционную картину с интенсивностью светового потока
IΣ = 2+2•cosΔΦ, (1)
где ΔΦ = Φг(t)-π.
Выражение (1) можно представить как
IΣ = 2•(1-cosΦг(t)), (2)
где Φг(t) = k•cos(ωt+Φ0),
k - коэффициент, характеризующий магнитооптические свойства ОФМ;
Φ0- величина сдвига по фазе при произвольном начальном положении основания 4;
ω- угловая скорость поворота основания 4 в горизонтальной плоскости.
Рассмотрим выражение (2). При вращении основания 4 сдвиг по фазе оптического потока Φг(t)- аргумент функции косинуса, меняется в зависимости от положения основания относительно направления горизонтальной составляющей HГ. Так как функция cos(ωt+Φ0) на интервале [0,2π] изменяется от -1 до +1, то сдвиг по фазе оптического потока Φг(t) изменяется от -k до +k. Значение сигнала IΣ при этом будет изменяться в пределах от 2•(1-cos(0))=0 до 2•(1-cos(k)). (Необходимо отметить, что в этом случае минимальное значение IΣ равно нулю за счет использования неуправляемого ОФМ 82, сдвигающего фазу оптического потока на π, что облегчает техническую реализацию процедуры сравнения и выбор опорного сигнала для анализа положения магнитного меридиана. При этом уровень максимального значения сигнала IΣ зависит от выбора значения k. Целесообразен выбор значения k = π, так как в этом случае амплитуда максимального сигнала IΣmax будет наибольшей.)
Направление плоскости магнитного меридиана определяется в процессе равномерного поворота основания 4 с угловой скоростью ω. В момент времени tГ когда за счет разворота оси чувствительности ОФМ 81 произойдет совпадение ее с плоскостью магнитного меридиана, сигнал IΣ принимает максимальное значение. Для определения данного момента времени tГ в устройстве используется известное условие экстремума функции:
Однако, в этом случае возникает неопределенность, так как при IΣ = 0 (ось чувствительности ориентирована в направлении "запад-восток") условие существования экстремума (здесь - минимума) также выполняется. Во избежание этой неопределенности в устройстве производится проверка двух условий:
IΣ ≠ 0, (3)
Для этого в канале ориентирования с ФП 10 сигнал, пропорциональный IΣ, поступает на компаратор 121, где сравнивается с нулевым (опорным) значением сигнала, и дифференциатор 11, с выхода которого сигнал, пропорциональный сигналу  поступает на компаратор 122, где также сравнивается с нулевым сигналом.
поступает на компаратор 122, где также сравнивается с нулевым сигналом.
При этом возможны следующие сочетания входных и выходных сигналов для компараторов 121, 122:
1) на входе компаратора 121 нулевой сигнал, на его выходе - "1";
на входе компаратора 122 - "0", на его инверсном выходе - "0";
2) на входе компаратора 121 ненулевой сигнал, на его выходе - "0";
на входе компаратора 122 ненулевой сигнал, на его инверсном выходе - "1";
3) на входе компаратора 121 ненулевой сигнал, на его выходе - "0";
на входе компаратора 122 нулевой сигнал, на его инверсном выходе - "0".
Только в случае 3, когда направление проекции HГ совпадает с направлением оси чувствительности управляемого ОФМ 81, с выходов компараторов 121, 122 на входы элемента ИЛИ-НЕ 13 поступают сигналы, формирующие на его выходе единичный сигнал, запирающий ключ 14. Так как на информационный вход ключа 14 подается сигнал питания Uпит, который далее поступает на двигатель 5i, i = 1, 2, 3, то при формировании единичного сигнала на управляющем входе ключа 14 основание 4 прекращает движение в соответствующей плоскости.
Работа канала 33 осуществляется аналогично работе канала 31 до момента обработки сигналов в логическом элементе ИЛИ-НЕ 13 - в КВО2 33, так как на его входы поступают сигналы уже с инверсных выходов компараторов 121, 122. Это обусловлено особенностью работы канала 33, состоящей в следующем. Конечное (требуемое) положение оси чувствительности его ОФМ 81, когда основание 4 сориентируется так, что ось чувствительности канала 31 установится в направлении магнитного меридиана, а ось чувствительности канала 32 установится в направлении магнитной вертикали, будет соответствовать направлению "запад-восток", при этом интерференционный сигнал на входе ФП 10 становится равным нулю (IΣ = 0). Таким образом, для канала 33 условие (3) преобразуется к виду
IΣ = 0, (4)
Для анализа выполнения этого условия в канале 33 используется инверсный выход компаратора 121 и инверсный выход компаратора 122, которые обеспечивают требуемое сочетание сигналов (0,0) для выходов логического элемента ИЛИ-НЕ 13 лишь в случае выполнения условия (4).
С датчиков углов 6i, i = 1, 2, 3, снимаются значения углов, соответствующих магнитному азимуту объекта и углам отклонения объекта, на котором установлено устройство, от оси магнитной вертикали.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЗИМУТАЛЬНЫЙ МАГНИТООПТИЧЕСКИЙ ОРИЕНТАТОР | 1999 |
|
RU2156439C1 |
| ПРОСТРАНСТВЕННЫЙ МАГНИТООПТИЧЕСКИЙ ОРИЕНТАТОР | 2001 |
|
RU2191349C1 |
| ОПТИЧЕСКИЙ ДИФФЕРЕНЦИАТОР | 1999 |
|
RU2159461C1 |
| ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ КОДОВ | 2000 |
|
RU2177164C1 |
| ОПТИЧЕСКИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2000 |
|
RU2177165C1 |
| ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ КОДОВ | 1999 |
|
RU2163725C1 |
| ОПТИЧЕСКИЙ ГЕНЕРАТОР ХАОТИЧЕСКИХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 1999 |
|
RU2150734C1 |
| ОПТОЭЛЕКТРОННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1999 |
|
RU2152070C1 |
| ОПТИЧЕСКИЙ ГЕНЕРАТОР ХАОТИЧЕСКИХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2001 |
|
RU2190872C1 |
| ОПТИЧЕСКИЙ ГЕНЕРАТОР РАВНОМЕРНО РАСПРЕДЕЛЕННЫХ ХАОТИЧЕСКИХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 1999 |
|
RU2150140C1 |

Изобретение относится к технике автономной ориентации и может быть использовано при определении ориентации стационарных объектов относительно Земли. Сущность изобретения состоит в том, что в устройство введены источник когерентного излучения, оптический разветвитель, канал ориентирования. Каждый из каналов ориентирования содержит управляемый оптический фазовый модулятор, неуправляемый оптический фазовый модулятор, оптический объединитель, дифференциатор, два компаратора, элемент ИЛИ-НЕ, ключ. Выход источника излучения подключен ко входу оптического разветвителя, первое и второе оптические разветвления которого подключены ко входам канала горизонтального ориентирования, третье и четвертое оптические разветвления которого подключены ко входам первого канала вертикального ориентирования, пятое и шестое оптические разветвления которого подключены ко входам второго канала вертикального ориентирования. Выходы каналов ориентирования подключены ко входам управления двигателями, в каждом канале ориентирования выходы пары оптических разветвлений оптического разветвителя подключены ко входам управляемого оптического фазового модулятора и неуправляемого оптического фазового модулятора. Выходы обоих оптических фазовых модуляторов подключены ко входам оптических ответвлений оптического объединителя, выход которого подключен ко входу фотоприемника, выход которого подключен ко входу первого компаратора и входу дифференциатора, выход которого подключен ко входу второго компаратора. Входы элемента ИЛИ-НЕ соединены с инверсным выходом второго компаратора и с прямым выходом первого компаратора в канале горизонтального ориентирования и первом канале вертикального ориентирования (во втором канале вертикального ориентирования - с инверсным выходом первого компаратора), выход элемента ИЛИ-НЕ подключен к управляющему входу ключа, информационный вход которого объединен со входом питания двигателя, выход ключа является выходом канала, а выходами устройства являются выходы датчиков углов, установленных по осям карданова подвеса. Технический результат: повышение точности пространственного ориентирования стационарных объектов относительно направлений составляющих вектора напряженности геомагнитного поля Земли. 2 ил.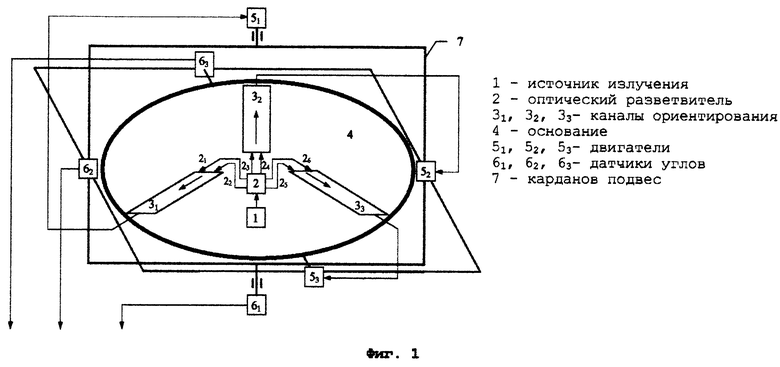
Магнитооптический ориентатор, содержащий вращающееся основание в трехосном кардановом подвесе, три двигателя, три датчика углов, каналы ориентирования, отличающийся тем, что в него введены источник когерентного излучения, оптический разветвитель, канал ориентирования, каждый из каналов ориентирования содержит управляемый оптический фазовый модулятор, неуправляемый оптический фазовый модулятор, оптический объединитель, дифференциатор, два компаратора, элемент ИЛИ-НЕ, ключ, выход источника излучения подключен ко входу оптического разветвителя, первое и второе оптические разветвления которого подключены ко входам канала горизонтального ориентирования, третье и четвертое оптические разветвления которого подключены ко входам первого канала вертикального ориентирования, пятое и шестое оптические разветвления которого подключены ко входам второго канала вертикального ориентирования, выходы каналов ориентирования подключены ко входам управления двигателями, в каждом канале ориентирования выходы пары оптических разветвлений оптического разветвителя подключены ко входам управляемого оптического фазового модулятора и неуправляемого оптического фазового модулятора, выходы обоих оптических фазовых модуляторов подключены ко входам оптических ответвлений оптического объединителя, выход которого подключен ко входу фотоприемника, выход которого подключен ко входу первого компаратора и входу дифференциатора, выход которого подключен ко входу второго компаратора, входы элемента ИЛИ-НЕ соединены с инверсным выходом второго компаратора и с прямым выходом первого компаратора в канале горизонтального ориентирования и первом канале вертикального ориентирования (во втором канале вертикального ориентирования - с инверсным выходом первого компаратора), выход элемента ИЛИ-НЕ подключен к управляющему входу ключа, информационный вход которого объединен со входом питания двигателя, выход ключа является выходом канала, а выходами устройства являются выходы датчиков углов, установленных по осям карданова подвеса.
| ХЛЕБНИКОВ Г.А | |||
| Начальная выставка инерциальных навигационных систем | |||
| - М.: Военная академия им.Ф.Э.Дзержинского, 1994, стр.308 | |||
| КУЗНЕЦОВ В.Ф | |||
| Навигация | |||
| - М.: Морской транспорт, 1956, стр.69. |
