Настоящее изобретение касается способа и системы контроля дистанционного процессора в условиях операционной системы параллельного действия в реальном времени (ОСПДРВ), приводимого в действие в процессоре контроля по вызову (ПКВ) систем связи многостанционного доступа с кодовым разделением каналов (МДКРК) и обслуживания личной связи (ОЛС). Более конкретно, настоящее изобретение обеспечивает удобство обслуживания и управления системы посредством дистанционного управления на базовых приемопередающих станциях в условиях ОСПДРВ.
Поскольку операционная система (ОС) систем многостанционного доступа с кодовым разделением каналов (МДКРК) и обслуживания личной связи (ОЛС) представляет собой многозадачную операционную систему, работающую в реальном времени (МОСРРВ), не имеющую блока для сопряжения операционной системы (ОС) с блоком прикладных задач пользователя, обычную функцию вывода дистанционных базовых приемопередающих станций можно выполнять в периферийном процессоре в МОСРРВ.
Когда пользователь захочет увидеть выходные сообщения дистанционной базовой приемопередающей станции (БППС) в качестве дистанционного контроля, он должен подать команду операционной системы (ОС) для передачи сообщений в буфер печати по последовательному каналу.
Независимая от команд операционная система параллельного действия в реальном времени (ОСПДРВ) имеет командный процессор для сопряжения ядра ОСПДРВ с блоком прикладных задач пользователя, но командный процессор не способен обрабатывать выходные сообщения дистанционных контроллеров базовых станций (КБС) и базовых приемопередающих станций (БППС) без специальной команды на командный процессор. В условиях ОСПДРВ, поскольку командный процессор не имеет программы для манипулирования выходными сообщениями дистанционных базовых приемопередающих станций (БППС), другие процессоры кроме периферийного процессора, не способны увидеть выходные сообщения.
В соответствии с этим, командному процессору необходима регистрация специальной обработки для контроля дистанционных базовых приемопередающих станций (БППС) в условиях ОСПДРВ. В патенте США N 5696901 раскрыта система для обеспечения различных функций, включающих дистанционный контроль. Система включает в себя девять логических компонент и три физических компоненты (локальная основная вычислительная система, дистанционная основная вычислительная система и разделительная сеть), и мониторы локальной основной и дистанционной основной вычислительных систем, соединенных сетью.
Эта система выполняет различные функции посредством сопровождения программного обеспечения, но не обеспечивает способ для прямого приема выходных сообщений от процессора дистанционной базовой приемопередающей станции (БППС) через буфер сообщений центра обработки информации между различными типами процессоров, соединенных сетью.
Настоящее изобретение касается способа и системы контроля дистанционных базовых приемопередающих станций (БППС) в условиях операционной системы параллельного действия в реальном времени (ОСПДРВ), приводимых в действие в процессоре контроля по вызову (ПКВ) систем связи МДКРК и ОЛС.
Более конкретно, это изобретение обеспечивает способ и систему для регистрации в командном процессоре программы, которая способствует дистанционному контролю и выполняет неограниченные задания с помощью диспетчера.
Дистанционный контроль, который выполняется в многозадачной операционной системе, работающей в реальном времени (МОСРРВ), может выполняться в операционной системе параллельного действия в реальном времени (ОСПДРВ) посредством регистрации специальной программы для обработки сигналов, передаваемых от дистанционных базовых приемопередающих станций (БППС) и контроллеров базовых станций (КБС) и принимаемых на них.
В результате пользователь может везде видеть выходные сообщения, вырабатываемые в дистанционных базовых приемопередающих станциях (БППС) и контроллерах базовых станций (КБС) путем регистрации такой же команды в операционной системе параллельного действия в реальном времени (ОСПДРВ), процессора контроля по вызову (ПКВ) как команда в многозадачной операционной системе, работающей в реальном времени (МОСРРВ).
Способ контроля дистанционных базовых приемопередающих станций (БППС) в условиях ОСПДРВ, приводимых в действие в системах связи МДКРК и ОЛС, содержит этапы: передачи информации дистанционного управления в целевой процессор контроля по вызову (ПКВ) от исходного процессора контроля по вызову; проверки, согласуется ли обозначенный идентификатор (ИД) дистанционного управления с управляющей информацией целевого процессора контроля по вызову (ПКВ), и посылки подтверждающего сообщения в соответствии с результатом проверки; передачи команды дистанционного управления на целевой процессор контроля по вызову (ПКВ) в соответствии с подтверждающим сообщением; подготовки ответной информации в целевом процессоре контроля по вызову (ПКВ) в ответ на команду дистанционного управления (ДУ); назначения буфера сообщений передачи данных обработки в качестве буфера печати посредством управления контрольным процессором операционной системы параллельного действия в реальном времени (ОСПДРВ), для последовательной передачи ответной информации и выведения последовательной ответной информации на экран исходного процессора контроля по вызову (ПКВ).
Система для дистанционного контроля дистанционных базовых приемопередающих станций (БППС) в системах связи многостанционного доступа с кодовым разделением каналов (МДКРК) и обслуживания личной связи (ОЛС), имеющая сеть контроллеров базовых станций, которая включает в себя базовые приемопередающие станции и контроллеры базовых станций в условиях ОСПДРВ, включает в себя операционную систему параллельного действия в реальном времени (ОСПДРВ) исходного процессора контроля по вызову (ПКВ) для выполнения дистанционного управления, ОСПДРВ целевого процессора контроля по вызову (ПКВ) для приема команды дистанционного управления от исходного процессора контроля по вызову (ПКВ), буфера сообщений межпроцессорной связи (МПС) для хранения подготовленной ответной информации в соответствии с результатом проверки идентификатора (ИД) команды дистанционного управления и для назначения в качестве буфера печати, и средство для назначения буфера сообщений межпроцессорной связи (МПС) в качестве буфера печати, с целью обеспечения последовательной передачи буфера сообщений межпроцессорной связи (МПС) в случае ответной информации на команду дистанционного управления.
В данном варианте осуществления, система операционной связи параллельного действия в реальном времени (ОСПДРВ), исходного процессора контроля по вызову (ПКВ) передает команду дистанционного управления через командный процессор ОСПДРВ.
Для реализации ОСПДРВ используется процессор модели 68030 MOTOROLA.
ОСПДРВ предпочтительно включает в себя ядро ОСПДРВ, блок прикладных задач пользователя и командный процессор для сопряжения ядра с блоком прикладных задач пользователя.
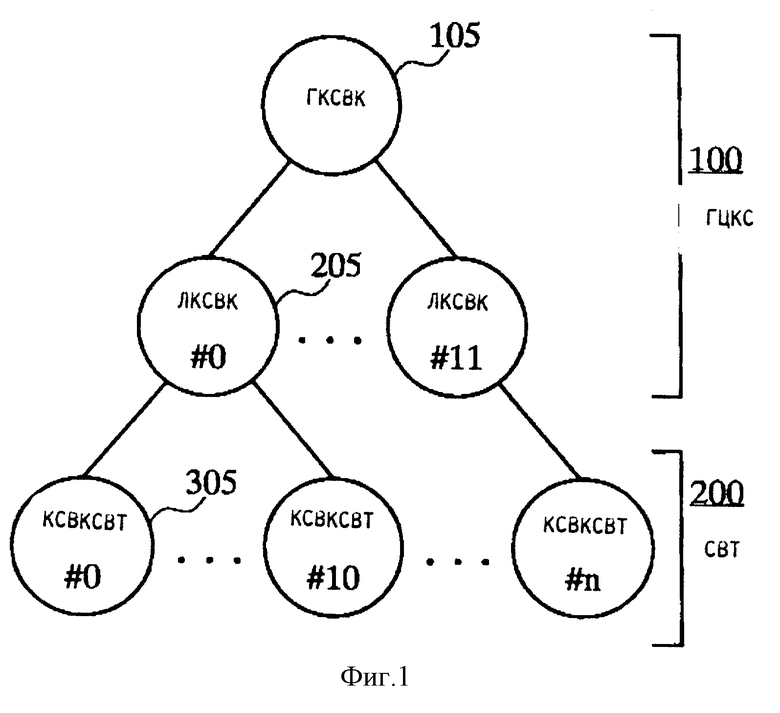
Сеть контроллеров базовых станций (КБС) включает в себя глобальную коммуникационную сеть с внутрисхемной коммутацией (ГКСВК) сверху, предварительно определенное количество локальных коммутационных сетей с внутрисхемной коммутацией (ЛКСВК) под управлением ГКСВК и множество коммуникационных сетей с внутрисхемной коммутацией базовых приемопередающих станций (БППС) под управлением ЛКСВК.
Контроллер базовой станции (КБС) имеет один процессор контроля по вызову (ПКВ), который контролирует все базовые приемопередающие станции в пределах соответствующего контроллера базовой станции.
Блок прикладных задач пользователя использует базисные элементы, заранее определенные командным процессором.
Командный процессор сопрягает разнообразные вводимые с клавиатуры команды отладки для программы, которые может обрабатывать ОСПДРВ.
Командный процессор передает сообщение от дистанционных базовой приемопередающей станции и контроллера базовой станции в последовательный канал.
Командный процессор анализирует команду, которую ввел с помощью ключей пользователь.
Командный процессор подтверждает, соответствует ли принятое сообщение команде дистанционного управления и делает команду действующей.
Фиг. 1 представляет схематический чертеж сети контроллера базовой станции в системе многостанционного доступа с кодовым разделением каналов (МДКРК) и обслуживания личной связи (ОЛС).
Фиг. 2 представляет схему ОСПДРВ, соответствующую варианту осуществления настоящего изобретения.
Основные коды на рисунках:
10 - ГКСВК (глобальная коммуникационная сеть с внутрисхемной коммутацией),
20 - ЛКСВК (локальная коммуникационная сеть с внутрисхемной коммутацией),
30 - КСВКБППС (коммуникационная сеть с внутрисхемной коммутацией базовой приемопередающей станции),
40 - блок прикладных программ пользователя,
50 - командный процессор,
60 - ядро ОСПДРВ,
100 - КБС (контроллер базовой станции),
200 - БППС (базовая приемопередающая станция),
300 - ОСПДРВ (операционная система параллельного действия в реальном времени).
Настоящее изобретение подробно представлено в нижеприведенном описании предпочтительного варианта осуществления со ссылкой на следующие чертежи.
Фиг. 1 представляет схематический чертеж сети контроллера базовой станции (КБС) в системе связи МДКРК и ОЛС. В такой сети контроллер базовой станции (КБС) имеет только один процессор контроля по вызову (ПКВ). ПКВ называют главным процессором, операционная система параллельного действия в реальном времени (ОСПДРВ) (300) которого включает в себя командный процессор (50) операционной системы (ОС) и различные прикладные программы (40) пользователя.
Прикладные программы пользователя могут использовать базисные элементы, заранее определенные командным процессором, а среди базисных элементов, один базисный элемент является программой, связывающей различные команды отладки, вводимые с клавиатуры в операционную систему. Цель настоящего изобретения достигается путем усовершенствования этой программы.
Когда ОСПДРВ передает сообщения от дистанционных базовых приемопередающих станций (БППС) и контроллеров базовых станций (КБС) в последовательный канал, командный процессор ОСПДРВ должен иметь программу для обработки сообщений. Командный процессор дополнительно включает в себя этапы: интерпретирования команд, которые пользователи вводят с клавиатуры, распознавания команд, определения, является ли принятое сообщение дистанционной командой, и формирования команд, действующих в командном процессоре.
Фиг. 2 представляет собой схематическую структуру и функционирование операционной системы параллельного действия в реальном времени (ОСПДРВ), ОСПДРВ, показанная на фиг. 1 операционная система сети контролеров базовых станций (КБС) имеет ядро ОС, блок прикладных программ пользователя, и командный процессор для сопряжения ядра ОС с блоком прикладных программ пользователя.
В предпочтительном варианте осуществления для реализации ОСПДРВ используют процессор MOTOROLA 68030, обладающий способностью обработки 256 источников прерываний.
Прерывания между командным процессором и блоком прикладных программ пользователя используют источник N 33 прерывания и обычно называют ловушкой N 1. Командный процессор (50) дает 130 директивных номеров прерываниям ловушки N 1. 130 директивных номеров различаются в соответствии со значением регистра данных N 0. При введении команды дистанционного управления на подсказке, программа манипулирования прерыванием в командном процессоре задает директивный номер команде дистанционного управления (ДУ), как установлено выше, и операционная система передает сигнал запуска команды ДУ на целевой процессор, целевой процессор контроля по вызову (ПКВ), который отслеживает процессор контроля по вызову (ПКВ) источника после этой команды. Целевой процессор назначает и использует буфер сообщений межпроцессорной связи (МПС) в качестве буфера печати путем управления командного процессора ОСПДРВ, так, чтобы послать информацию о базовой приемопередающей станции (БППС), и передает сигнал подтверждения запуска дистанционного управления. Исходный процессор контроля по вызову (ПКВ) принимает сигнал подтверждения запуска дистанционного управления и выводит сообщение на электронно-лучевую трубку (ЭЛТ). Дистанционное управление продолжается на серии обработок.
Существующее дистанционное управление можно выполнять не в главных процессорах, а в периферийных процессорах. Однако в соответствии с манипулированием прерыванием и передачей информации контроля в соответствии с этим изобретением, как установлено выше, дистанционное управление расширяется на весь контроллер базовой станции (КБС), включая процессор контроля по вызову (ПКВ).
Следовательно, выходные сообщения всех базовых приемопередающих станций управляются независимо от операционной системы и конечный пользователь может контролировать любую базовую приемопередающую станцию и любой контроллер базовой станции лишь путем объединения порта отладки с процессором независимо от того, имеет ли процессор многозадачную операционную систему, работающую в реальном времени (МОСРРВ) или операционную систему параллельного действия в реальном времени.
Способ дистанционного контроля ОСПДРВ заключается в том, что вводят команду дистанционного управления (ДУ), присваивают директивный этой команде программой манипулирования прерыванием в командном процессоре ОСПДРВ, передают сигнал запуска команды ДУ целевому относительно команды ДУ процессору контроля по вызову (ПКВ), в ответ на сигнал запуска команды ДУ целевой ПКВ назначает содержимое буфера межпроцессорной связи буферу печати и передает сигнал подтверждения запуска ДУ исходному ПКВ, в ответ на сигнал подтверждения запуска ДУ исходный ПКВ выводит все сообщения, выведенные на электронно-лучевую трубку целевого ПКВ, на своем экране. Система для контроля исходным ПКВ целевого ПКВ с использованием команды (ДУ) в системе МДКРК и ОЛС, включает в себя множество базовых приемопередающих станций (БППС), каждая из которых имеет процессор управления для предоставления обслуживания связью мобильным станциям, и множество контроллеров базовых станций (КБС), каждый из которых имеет ПКВ для управления указанным множеством базовых приемопередающих станций (БППС), содержит целевой ПКВ, задействуемый в условиях ОСПДРВ, для управления множеством процессоров управления БППС, исходный ПКВ, задействуемый в условиях ОСПДРВ, для управления множеством процессоров управления БППС и для осуществления ДУ целевым ПКВ, буфер печати целевого ПКВ, буфер межпроцессорной связи МПС целевого ПКВ, буфер сообщений МПС исходного ПКВ, для передачи в него содержимого из буфера МПС целевого ПКВ через последовательный канал МПС, и буфер печати исходного ПКВ для хранения содержимого буфера МПС исходного ПКВ и вывода содержимого на отображающий экран исходного ПКВ. Технический результат заключается в обеспечении регистрации в командном процессоре программы, которая способствует ДУ и выполняет неограниченные задания с помощью диспетчера. 2 с. и 10 з.п. ф-лы, 2 ил.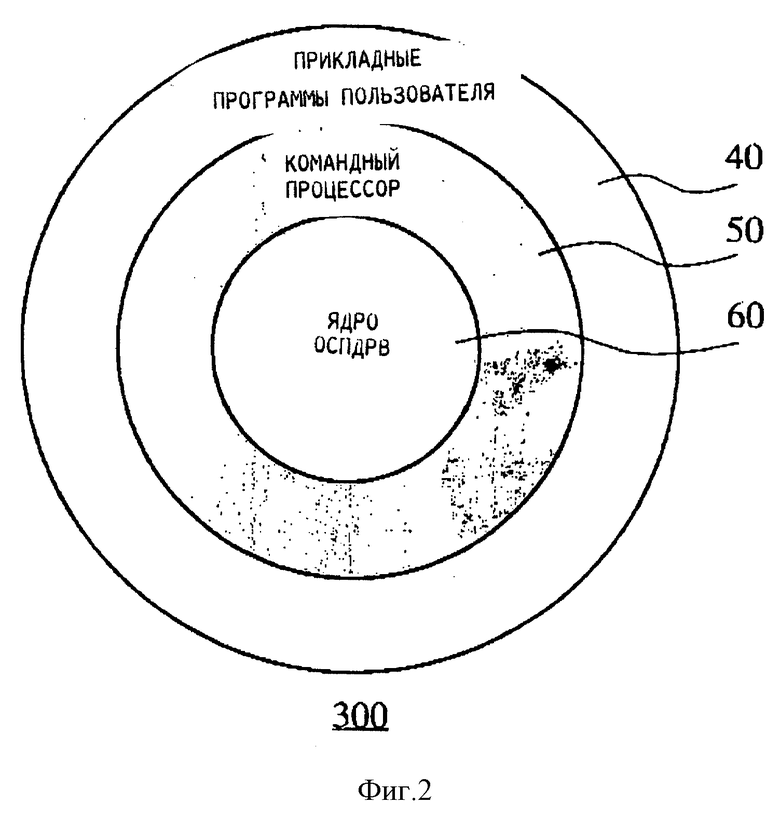
| SU, 1383380 A1, 23.03.1983 | |||
| SU, 1807496 A1, 07.04.1993 | |||
| US, 5124909 A, 23.06.1992, US, 5544320 A, 06.08.1993. |

