Область техники, к которой относится изобретение
Изобретение относится к области систем подвижной телефонной связи, а более конкретно - к способу подтверждения местоположения подвижкой станции в системе подвижной связи.
Уровень техники
Известная система сотовой радиосвязи включает в себя подвижную станцию (ПС), которая принимает услуги радиосвязи, базовую приемопередающую станцию (БППС), предоставляющую услуги радиосвязи для подвижной станции (ПС) внутри конкретной области, контроллер базовой станции (КБС), подсоединяющий БППС к центру коммутации подвижных абонентов (ЦКП), и центр коммутации подвижных абонентов (ЦКП), подсоединяющий контроллер базовой станции (КБС) к коммутируемой телефонной сети общего пользования (КТСОП).
В последнее время были введены в эксплуатацию системы подвижной связи, предоставляющие новые услуги. Услуга определения местоположения, например, позволяет определить местоположение многочисленных подвижных станций. Это полезно в случае срочных вызовов в чрезвычайных ситуациях, таких как "119", подобно службе "911" в США, или отслеживания незарегистрированных абонентов, или в тех случаях, когда требуется организация физического распределения (то есть, поиск украденных подвижных станций или сообщение о зарегистрированных подвижных станциях).
В соответствии с известной технологией сети подвижной связи местоположение подвижной станции определяют при помощи отдельного приемного устройства, которым оборудована каждая БППС, причем каждая БППС должна принимать радиоволны, излучаемые из подвижной станции. Разность во времени прихода (РВВП) возникает вследствие задержек используемых радиоволн, которые принимают в каждой из множества БППС.
Для системы, которая описана выше, подвижная станция должна излучать отдельную отведенную радиоволну, предназначенную для предоставления услуги определения местоположения. Следовательно, система определения местоположения должна быть сконфигурирована отдельно от сети подвижной связи и, следовательно, необходимо иметь продублированные аппаратные ресурсы.
В патенте US N 5614914 "Беспроводная телефонная система распределения с разнесенной во времени и пространстве передачей для определения местоположения приемника" раскрыт способ определения местоположения подвижной станции с помощью использования сигнала подвижных станций, который принимают с задержкой во времени в множестве антенн, расположенных в пространстве отдельно друг от друга. Однако предоставление услуги определения местоположения, согласно раскрытому способу, имеет недостаток, связанный с тем, что требуется отдельная система определения местоположения. Соответственно, задача настоящего изобретения заключается в том, чтобы создать систему и способ, обеспечивающий предоставление услуги определения местоположения в существующей системе подвижной связи без необходимости использования отдельных выделенных аппаратных средств.
Сущность изобретения
Настоящее изобретение предусматривает новую систему определения местоположения, которая позволяет вычислить и распознать местоположение подвижной станции (ПС) в сети подвижной связи. Кроме того, настоящее изобретение предусматривает способ, который позволяет центру коммутации подвижных абонентов (ЦКП) делать запрос на предоставление услуги определения местоположения в соответствии с потребностями подвижной станции или сети.
Согласно одному аспекту настоящего изобретения система подвижной связи включает в себя
по меньшей мере три базовые приемопередающие станции (БППС), принимающие сигнал с функцией включения питания (ФВП), принимаемое от подвижной станции наряду с параметрами обнаружения, необходимыми для определения местоположения подвижной станции, и
центр коммутации подвижных абонентов (ЦКП), включающий в себя средства для вычисления местоположения подвижной станции с помощью приема и объединения параметров обнаружения.
В настоящем изобретении описывается предпочтительный вариант осуществления системы подвижной связи, включающей в себя обслуживающую базовую приемопередающую станцию (БППС), подсоединяющую канал для обеспечения связи с подвижной станцией, по меньшей мере две соседние БППС, расположенные рядом с обслуживающей БППС, контроллер базовой станции (КБС), управляющий обслуживающей БППС и соседними БППС, и
центр коммутации мобильных абонентов (ЦКП), подсоединяющий КБС к коммутируемой телефонной сети общего пользования (КТСОП), при этом способ включает в себя следующие операции
(а) делают запрос из ЦКП на предоставление услуги определения местоположения в КБС, (b) делают запрос из ЦКП на выделение канала для подвижной станции в соседних БППС, в соответствии с запросом ЦКП на предоставление услуги определения местоположения,
(с) подсоединяют канал между подвижной станцией и соседними БППС и посылают ответный сигнал в КБС с помощью соседних БППС, в соответствии с запросом КБС при операции (b),
(d) выдают команду от КБС, обслуживающей БППС на запрос сигнала с функцией включения питания (ФВП) от подвижной станции,
(е) выдают от обслуживающей БППС подвижной станции на передачу сигнала ФВП в соответствии с командой КБС при операции (d),
(f) передают сигнал ФВП в обслуживающую БППС и в соседние БППС с помощью подвижной станции, в соответствии с командой обслуживающей БППС при операции (е),
(g) обнаруживают параметры с помощью обслуживающей БППС, необходимые для вычисления местоположения подвижной станции, и с помощью приема множества сигналов ФВП, переданных из подвижной станции, причем каждый сигнал ФВП передают с различной задержкой во времени,
(h) выдают в КБС сообщение об обнаруженных параметрах с помощь обслуживающей БППС и соседних БППС,
(i) передают параметры, сообщенные из обслуживающей БППС и соседних БППС, в ЦКП с помощью КБС, и
(j) вычисляют местоположение подвижной станции, используя обнаруженные параметры, с помощью ЦКП.
Согласно одному аспекту настоящего изобретения, операция запроса на предоставление услуги определения местоположения можно инициализировать как запрос подвижной станции или когда оператор сети делает запрос на информацию о местоположении подвижной станции.
Согласно другому аспекту настоящего изобретения, первый таймер активизируется после того, как КБС примет запрос на предоставление услуги определения местоположения из ЦКП, и останавливается в момент времени, когда снова запрашивают предоставление услуги определения местоположения для подвижной станции с помощью ЦКП или когда выдается сообщение об окончании предоставления услуги определения местоположения для подвижной станции.
Согласно другому аспекту настоящего изобретения, КБС делает запрос по меньшей мере на две БППС из числа всех БППС, включенных в список соседних БППС обслуживающей БППС, для того, чтобы выделить канал для подвижной станции при операции (b).
В другом аспекте настоящего изобретения, операцию (d) выдачи КБС команды обслуживающей БППС для запроса сигнала ФВП, выполняют с помощью передачи информации о сигнале ФВП, удовлетворяющей стандарту IS-95B, в обслуживающую БППС с помощью КБС.
В дополнительном аспекте настоящего изобретения, информация о сигнале ФВП включает в себя интервал уровня мощности, интервал времени и время передачи.
В другом аспекте настоящего изобретения, способ дополнительно включает в себя операцию возврата к операции (b) запроса выделения канала для подвижной станции в соседних БППС, в случае, когда ЦКП повторно делает запрос на предоставление услуги определения местоположения для подвижной станции в пределах первого заданного интервала времени (первый таймер), причем первый заданный интервал времени определяется от момента времени, когда ЦКП делает запрос на предоставление услуги определения местоположения в КБС, до момента времени, когда КБС принимает от ЦКП сигнал завершения предоставления услуги определения местоположения.
Согласно другому аспекту настоящего изобретения, способ дополнительно включает в себя операцию завершения услуги определения местоположения, если ЦКП повторно не делает запрос на предоставление услуг определения местоположения для подвижной станции в пределах первого заданного интервала времени первого таймера, с тех пор, как ЦКП сделал запрос КБС на предоставление услуги определения местоположения.
В еще одном дополнительном аспекте настоящего изобретения, операция (g) приема сигнала ФВП с помощью обслуживающей БППС и соседних БППС, дополнительно включает в себя операцию освобождения с помощью соседней (соседних) БППС предварительно выделенного канала между подвижной станцией и соседней (соседними) БППС, которая не получила сигнал ФВП, если по меньшей мере одна соседняя БППС не получает сигнал ФВП после того, как подвижная станция передает сигнал ФВП в пределах заданного времени, которое определяют с помощью второго таймера.
Согласно другому аспекту настоящего изобретения, способ дополнительно включает в себя операцию завершения предоставления услуги определения местоположения, если ЦКП делает запрос на завершение предоставления услуги определения местоположения в пределах критического времени первого таймера, с тех пор как ЦКП сделал запрос КБС на предоставление услуги определения местоположения.
Согласно способу настоящего изобретения, параметры представляют собой значения задержек во времени сигнала ФВП, измеренного в каждой БППС.
Согласно другому аспекту настоящего изобретения, операция (i) передачи параметров в ЦКП дополнительно включает в себя операцию выдачи сообщения в ЦКП о неисправности, когда число БППС, которые несут информацию об обнаруженных параметрах для КБС, меньше или равно двум.
Согласно другому аспекту настоящего изобретения, операция (i) передачи параметров в ЦКП дополнительно включает в себя операцию выдачи команды, по меньшей мере, одной БППС, которая не выдала сообщение об обнаруженных параметрах, для повторного подсоединения канала к подвижной станции с помощью КБС, когда число БППС, которые несут информацию об обнаруженных параметрах для КБС, меньше или равно двум.
Краткое описание чертежей
Сущность изобретения иллюстрируется ссылкой на сопроводительные чертежи, на которых:
фиг. 1 изображает конфигурацию системы определения местоположения для системы подвижной связи, согласно настоящему изобретению;
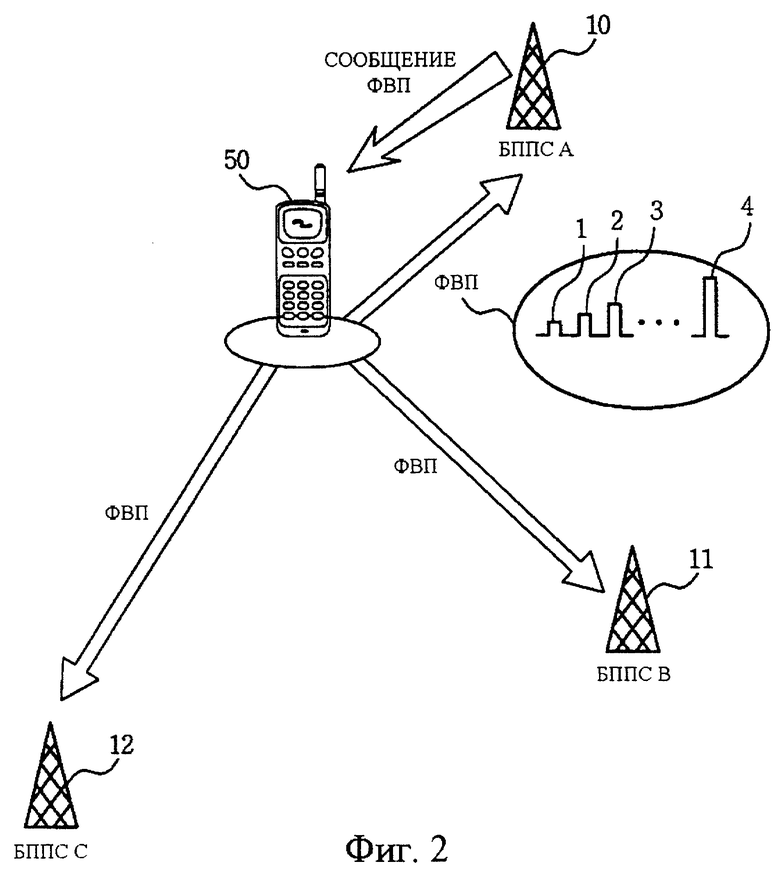
фиг. 2 изображает прием сигнала ФВП (функция включения питания) в базовой приемопередающей станции (БППС);
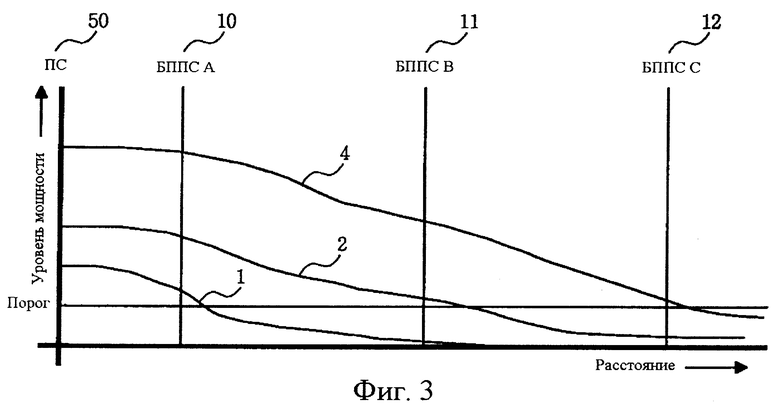
фиг. 3 изображает графическую зависимость уровня принимаемой мощности сигнала ФВП около каждой БППС от расстояния;
фиг. 4 изображает схему передачи сообщений сигнала, иллюстрирующую способ получения услуги определения местоположения центра коммутации подвижных абонентов, согласно настоящему изобретению;
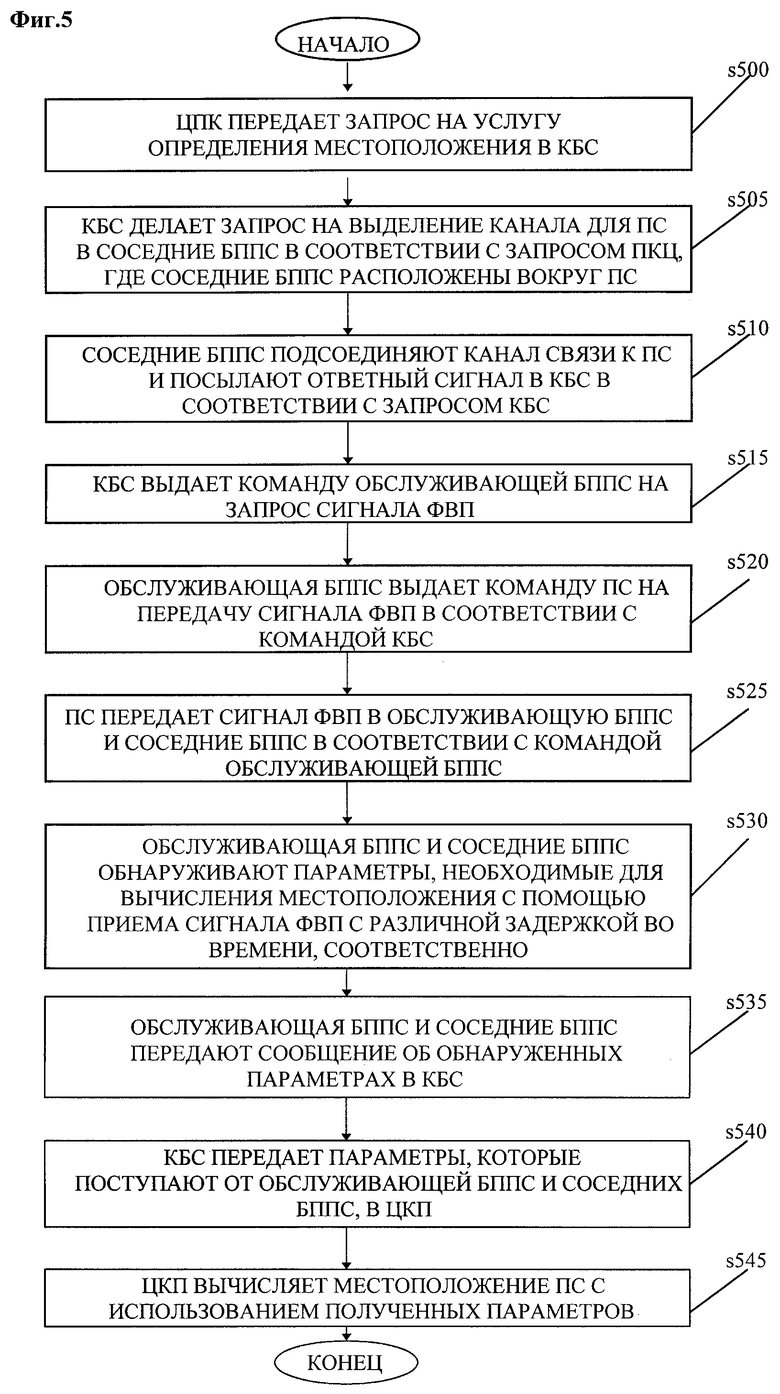
фиг. 5 изображает схему, иллюстрирующую способ запроса на предоставление услуги определения местоположения центра коммутации подвижных абонентов, согласно настоящему изобретению.
Подробное описание предпочтительного варианта осуществления
В настоящем изобретении раскрывается способ предоставления услуги определения местоположения в системе подвижной связи. Перед описанием основного способа настоящего изобретения приводится объяснение действия сигнала с функцией включения питания (ФВП) и работы трех таймеров, используемых в способе настоящего изобретения.
Сигнал с функцией включения питания (ФВП)
В сотовой системе множественного доступа с кодовым разделением каналов (МДКР) или в системе персональных услуг связи (ПУС), поддерживающих стандарт IS-95B, в качестве беспроводного интерфейса между подвижной станцией и базовой приемопередающей станцией, базовая приемопередающая станция (БППС) может производить запрос сигнала с функцией включения питания (ФВП) в подвижной станции, и подвижная станция, обеспечивающая IS-95B, может передать сигнал ФВП в соответствии с запросом БППС.
Сигнал ФВП является самым мощным сигналом, который передается с помощью подвижной станции, в соответствии с запросом БППС. Подвижная станция передает импульс в определенном интервале времени, в котором импульс постепенно усиливается при определенных приращениях уровня мощности в течение заданного времени. Так как сигнал ФВП передается со значительно более высоким уровнем мощности по сравнению с общим сигналом передачи подвижной станции, БППС и соседние БППС могут легко принимать сигнал.
Три таймера
(1) Первый таймер
Местоположение: Контроллер базовой станции (КБС)
Применение: Активизируется сразу после запроса предоставления услуги определения местоположения из центра коммутации подвижных абонентов (ЦКП) и завершает работу, если он получает сообщение о завершении предоставления услуги определения местоположения из ЦКП. Если первый таймер останавливается, КБС завершает предоставление услуги определения местоположения.
(2) Второй таймер
Местоположение: Базовая приемопередающая станция (БППС)
Применение: Активизируется сразу после запроса на выделение канала от контроллера базовой станции (КБС), и завершает работу, если она принимает сигнал ФВП от подвижной станции. Если второй таймер завершает работу, соседняя БППС выдает информацию КБС, что сигнал ФВП не принят.
(3) Третий таймер
Местоположение: Подвижная станция (ПС)
Применение: Активизируется сразу после приема сообщения ФВП от обслуживающей БППС, передает сигнал ФВП и затем завершает работу. Если третий таймер заканчивает свою работу, подвижная станция определяет, что сигнал ФВП не передавался.
На фиг. 1 изображена система сотовой телефонной связи определения местоположения, согласно настоящему изобретению, которая включает в себя, по меньшей мере, три БППС 10, 11 и 12, каждая из которых принимает сигнал с функцией включения питания (ФВП) от подвижной станции, при этом каждая БППС дополнительно обнаруживает параметры, необходимые для поиска местоположения подвижной станции. То есть, БППС принимает сигнал ФВП от подвижной станции и измеряет время приема сигнала ФВП. Измеренное время представляет собой параметр значения, необходимый для вычисления местоположения подвижной станции, причем центр коммутации подвижных абонентов (ЦКП) 30 включает в себя средство для вычисления местоположения подвижной станции с помощью объединения параметров, принятых от каждой из трех БППС 10, 11 и 12 через контроллер базовой станции (КБС) 20, базу данных 32 местоположения, расположенную вместе с ЦКП для сохранения и управления расчетными данными местоположения подвижной станции, центр работы и поддержки (ЦРП) 31, расположенный вместе с ЦКП для обеспечения единственного положения управления (то есть, оператор получает информацию о состоянии конфигурации всей системы определения местоположения), способности управления, состояния ("статуса"), сигнала тревоги и функции диагностики и выдачи сообщения, прикладной процессор (ПП) 41 коммутируемой телефонной сети общего пользования (КТСОП) 40 для получения необходимой информации с помощью организации доступа к данным из базы данных 32 местоположения, а также для поддержания сопровождения конфигурации и управления системой определения местоположения.
В случае, когда подвижная станция поддерживает связь с БППС 10, БППС 10 рассматривается как обслуживающая БППС. Обслуживающая БППС 10 передает сообщение ФВП в подвижную станцию для запроса сигнала ФВП через прямой канал трафика, соединяющий подвижную станцию и БППС в случае, когда обслуживающей БППС 10 необходимо иметь информацию о местоположении подвижной станции.
Если подвижная станция принимает сообщение ФВП, то увеличивается уровень передаваемого выходного сигнала в течение краткого промежутка времени в пределах определенного интервала времени (третий таймер), затем передается сигнал ФВП, включающий в себя преамбулу, через обратный канал трафика (то есть, от ПС в БППС).
Третий таймер активизируется сразу после получения подвижной станцией сообщения ФВП от БППС, и останавливается в момент времени, когда она передает сигнал ФВП через обратный канал трафика.
Каждая, по меньшей мере, из трех БППС 10, 11 и 12, расположенных вокруг подвижной станции, передает сообщение ФВП и принимает сигнал ФВП, который передается от подвижной станции в виде ответа. Каждая БППС измеряет соответствующую задержку во времени (то есть, ВП (время прихода)) путем деления на 2 промежутка времени от передачи сообщения ФВП до приема сигнала ФВП. ЦКП 30 затем вычисляет местоположение подвижной станции с использованием задержек во времени, измеряемых в каждом БППС (то есть, БППС 10, 11 и 12).
На фиг. 2 изображено получение сигнала ФВП в БППС. Фиг. 2 изображает подвижную станцию 50, поддерживающую связь с БППС 10. Обслуживающая БППС 10 посылает сообщение ФВП в подвижную станцию 50. Подвижная станция 50, которая принимает сигнал сообщения ФВП, передает сигнал (15) ФВП, причем сигнал ФВП постепенно увеличивается до определенного уровня в пределах предварительно установленного интервала времени.
БППС 10 и ее соседние БППС 11, 12 принимают сигнал ФВП. Каждая БППС регистрирует разные значения задержки во времени РВВП (разность во времени прихода) в соответствии с соответствующим расстоянием до подвижной станции и окружающей радиообстановке.
На фиг. 3 представлена зависимость уровня мощности принимаемого сигнала ФВП, принимаемого каждой БППС, от расстояния. Как показано на фиг. 3, импульс (1) (2) (3) (4) ФВП, который передают из подвижной станции 50 за время последовательных приращений с постоянной длительностью (то есть, первый импульс передается через 1 мс, второй импульс передается через 2 мс и так далее). Кроме того, мощность увеличивается при фиксированном приращении в каждом последовательном интервале времени (то есть, 10 дБ (отсчитываемые от уровня 1 мВт) через 1 мс, 12 дБ через 2 мс, 14 дБ через 3 мс). Затем, БППС 10, расположенная ближе всего к подвижной станции 50, принимает импульс (1) ФВП. Однако, при увеличении расстояния импульс (1) ФВП постепенно ослабляется, и БППС 11 не может самостоятельно принимать ослабленный импульс (1) ФВП. Однако, следующий передаваемый импульс ФВП, импульс (2) ФВП, передается с более высоким уровнем, так что БППС 11 может принимать импульс (2) ФВП. Соответственно, БППС 12 может только принимать импульс (4) ФВП с самым высоким уровнем.
Каждая БППС 10, 11 и 12 передает РВВП в ЦКП 30 как задержку во времени, измеренную для импульса (4) ФВП (самого мощного сигнала), который принимают в каждой БППС. Каждая БППС также передает информацию для вычисления местоположения сети. ЦКП 30 затем вычисляет местоположение подвижной станции 50 с помощью алгоритма РВВП. Расчетные параметры местоположения подвижной станции 50 сохраняются затем в базе данных 32 местоположения.
Настоящее изобретение также раскрывает способ запроса предоставления услуги определения местоположения с помощью центра коммутации подвижных абонентов.
Так как БППС посылает сообщение ФВП в подвижную станцию, то ЦКП должен сделать запрос предоставления услуги определения местоположения в БППС через КБС. КБС выделяет канал трафика подвижной станции так, чтобы обслуживающая БППС и соседние БППС с данной БППС могли принимать сигнал ФВП, передаваемый с помощью подвижной станции.
То есть в случае, когда оператору сети необходимо узнать местоположение подвижной станции или с помощью запроса абонента (например, когда в подвижной станции набран номер "911"), ЦКП делает запрос на предоставления услуги определения местоположения в КБС. Затем, КБС делает запрос на предоставление услуги определения месторасположения в БППС, которая поддерживает связь с подвижной станцией или с БППС, с которой подвижная станция не синхронизирована через канал связи. Сразу после установления прямого канала трафика, БППС передает сообщение ФВП в соответствующую подвижную станцию через прямой канал трафика.
Что касается предварительно сохраненного списка соседних БППС, то КБС выдает команду соседним БППС, расположенным вокруг подвижной станции, на выделение канала подвижной станции, использующей длинный код с псевдослучайным шумом (ПШ) подвижной станции так, чтобы соседние БППС могли принимать сигнал ФВП, который будет передаваться с помощью подвижной станции. Если выделение канала соседних БППС завершено, подвижная станция передает сигнал ФВП, и БППС принимает его и затем передает измеренные параметры (например ВП, угол задержки, угол прихода и так далее) в ЦКП.
На фиг. 4 изображена схема передачи сообщений, иллюстрирующая способ запроса на предоставление услуги определения местоположения центра коммутации подвижных абонентов, согласно настоящему изобретению.
Когда подвижная станция 50, которая поддерживает связь с обслуживающей БППС 10 через канал трафика, выдает экстренный ("аварийный") вызов, например, "119" или когда оператор сети делает запрос на информацию о местоположении подвижной станции 50, ЦКП 30 выдает запрос на предоставление услуги определения местоположения с помощью передачи сообщения Loc_Svc_rqst в КБС 20 через канал (100) связи E1.
Затем, КБС 20 делает запрос на предоставление элементов канала трафика с помощью передачи сообщения TCE_ Asgn в соседние БППС 11 и 12 из подвижной станции в соответствии с запросом ЦКП 30 (110). В это время, КБС 20 выделяет канал двум или более соседним БППС путем использования списка соседних БППС обслуживающей БППС 10, подсоединяемой к подвижной станции 50 для поддержания связи.
Соседние БППС 11 и 12 принимают запрос предоставления элементов канала трафика, предоставляют канал трафика подвижной станции 50 с использованием информации о подвижной станции 50 и передают соответствующее ответное сообщение TCE_Asgn_ack обратно в КБС 20 (120).
КБС 20 принимает ответное сообщение от соседних БППС 11 и 12 и выдает команду обслуживающей БППС 10 на передачу сообщение ФВП ФВП_msq с помощью передачи сообщения (ФВП_msg_rqst в обслуживающую БППС 10 при связи с подвижной станцией 50 (130). Сообщение ФВП_msg_rqst включает в себя информацию, которую необходимо передать в подвижную станцию 50 с помощью БППС 10, то есть, информацию о приращении уровня для увеличения сигнала ФВП (например, приращение 2 дБ, приращение 4 дБ и так далее) и интервал времени для передачи сигнала ФВП.
Обслуживающая БППС 10 передает сигнал сообщения ФВП, ФВП_msg в подвижную станцию 50 через предварительно подсоединенный канал (140) трафика. Подвижная станция 50 реагирует на передачу сигнала ФВП в соответствии с информацией, включенной в принятое сообщение ФВП_msq (150). Сигнал сообщения ФВП включает в себя интервал уровня мощности, интервал времени, время передачи и так далее.
Затем обслуживающая БППС 10 и соседние БППС 11, 12, каждая из которых имеет канал трафика, подсоединенный к подвижной станции 50, принимают сигнал ФВП с различными задержками во времени. Если одна или несколько БППС из соседних БППС 11, 12 не приняли сигнал ФВП за определенный интервал времени (то есть, интервал, который определяется вторым таймером), БППС освобождает канал трафика и останавливает второй таймер.
То есть, второй таймер активизируется сразу после того, как соседняя БППС принимает запрос о выделении канала из КБС и останавливается, когда она принимает сигнал ФВП от подвижной станции.
Если все БППС 10, 11 и 12 принимают сигнал ФВП, БППС 10, 11 и 12 передают параметры местоположения, такие как задержка во времени, измеренная для сигнала ФВП в ЦКП 30 через КБС 20, и ЦКП 30 вычисляет местоположение подвижной станции в соответствии с принятыми параметрами (160) местоположения.
В это время, когда число отвечающих БППС меньше двух, например, одна БППС, расположенная среди других БППС, подсоединяющих канал трафика к подвижной станции для предоставления услуги определения местоположения, БППС освобождает канал трафика вследствие завершения работы второго таймера, местоположение подвижной станции вычислить невозможно. В результате, КБС 20 должен выдать сообщение о неисправности в ЦКП 30 или запрос повторного выделения канала трафика, по меньшей мере, одной БППС, которая не передала сообщение о параметре местоположения.
КБС 20, который принял сообщение Loc_Svc_rqst при операции (100), активизирует работу первого таймера. Первый таймер активизируется после того, как КБС принимает сообщение Loc_Svc_rqst из ЦКП, и останавливается в момент времени, когда он принимает сообщение Loc_Svc_rqst или Loc_Svc_Complete для той же самой подвижной станции от ЦКП.
Если сообщение Loc_Svc_rqst для той же самой подвижной станции 50 принимают от ЦКП 30 перед завершением работы первых таймеров, то КБС 20 делает запрос о выделении канала связи снова в соседние БППС 11 и 12 (170) и повторяют операции 110 - 150. Если сообщение Loc_Svc_rqst не получено до завершения работы первого таймера, то КБС 20 завершает предоставление услуги определения местоположения и первого таймера.
И если сообщение Loc_Svc_Cmpt (то есть, завершение предоставления услуги определения местоположения) передается от ЦКП 30 перед тем, как работа первых таймером завершится, КБС 20 выдает команду на освобождение канала путем передачи сообщения TCE_ release в соседние БППС 11 и 12 и завершает предоставление услуги (180) определения местоположения.
Описание таймера
Хотя таймеры были описаны в общем, более полное описание выполнено в контексте схемы передачи сообщений (фиг. 4).
1. Первый таймер располагается в пределах КБС и начинает работу в момент времени, когда он принимает сообщение Loc_Svc_rqst от ЦКП и завершает работу в момент времени, когда он принимает от ЦКП сообщения Loc_Svc_rqst или Loc_ Svc_Complete для той же самой подвижной станции.
2. Второй таймер располагается в БППС и начинает работу в момент времени, когда она принимает сообщение TCE_asgn для предоставления услуги определения местоположения от КБС и завершает работу в момент времени, когда она принимает сигнал ФВП от подвижной станции.
3. Третий таймер располагается в подвижной станции и начинает работу в момент времени, когда она принимает сообщение ФВП_msq от БППС и завершает работу в момент времени, когда она передает сигнал ФВП в БППС.
На фиг. 5 изображена схема, иллюстрирующая операции способа запроса на предоставление услуги определения местоположения центра коммутации подвижных абонентов согласно второму варианту осуществления настоящего изобретения.
Как установлено выше, предпочтительный вариант осуществления настоящего изобретения предусматривает подвижную станцию с возможностью предоставления услуги определения местоположения с использованием сигнала ФВП в соответствии со стандартом IS-95B. Способ включает в себя операцию инициализации запроса для предоставления услуги определения местоположения с помощью ЦКП и подтверждения запроса на предоставления услуги определения местоположения в КБС. В результате, настоящее изобретение позволяет преимущественно вычислить местоположение подвижной станции без необходимости отдельной системы определения местоположения, вместо использования существующей известной системы подвижной связи.
Хотя изобретение допускает различные модификации и альтернативные формы, его конкретные варианты осуществления показаны посредством примера со ссылкой на чертежи и подробно описаны здесь. Однако, следует понимать, что он служит не для ограничения изобретения, раскрытого в частных формах, а напротив для охвата всех модификаций, эквивалентов и вариантов без отклонения от сущности и объема изобретения, в том виде, как оно раскрыто в формуле изобретения.

Раскрыты система и способ запроса на предоставление услуги определения местоположения в системе подвижной связи. Центр коммутации подвижных абонентов (ЦКП) делает запрос на предоставление услуги определения местоположения в контроллере базовой станции (КБС), в ответ КБС делает запрос на выделение канала для подвижной станции по меньшей мере в двух соседних базовых приемопередающих станциях (БППС). Если соседние БППС подсоединяют канал и посылают ответный сигнал в КБС, КБС выдает команду обслуживающей БППС на запрос сигнала с функцией включения питания (ФВП). Обслуживающая БППС выдает команду подвижной станции ПС на передачу сигнала ФВП в соответствии с командой КБС. ПС передает сигнал ФВП в обслуживающую БППС и соседние БППС в соответствии с командой обслуживающей БППС. Обслуживающая БППС и соседние БППС обнаруживают параметры, которые запрашивают для вычисления местоположения с помощью приема сигнала ФВП с различной задержкой времени соответственно. Обслуживающая БППС и соседние БППС передают в КБС сообщение об обнаруженных параметрах, КБС передает параметры, которые передаются от обслуживающей БППС и соседних БППС в ЦКП. Затем ЦКП вычисляет местоположение ПС с использованием полученных параметров. Технический результат заключается в сокращении аппаратурных затрат. 2 с. и 12 з.п. ф-лы, 5 ил.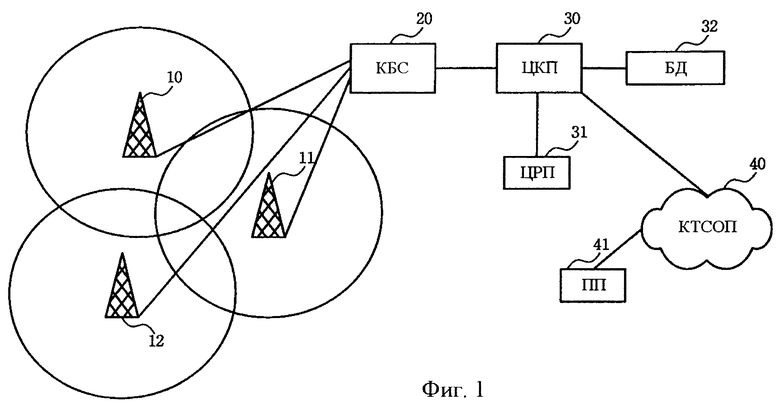
| US 5614914 A, 25.03.1997 | |||
| RU 94013065 A1, 27.12.1995 | |||
| СПОСОБ РЕГИСТРАЦИИ ПОДВИЖНОГО КОММУНИКАЦИОННОГО УСТРОЙСТВА | 1994 |
|
RU2107397C1 |
| US 5212684 A, 18.05.1993 | |||
| US 5293643 A, 08.03.1994 | |||
| US 5119502 A, 02.06.1992. | |||

