Изобретение относится к области транспортного машиностроения и может быть использовано при создании транспортных средств, применяемых в качестве наземных, воздушных, надводных и, при необходимости, подводных средств передвижения, а также в качестве средств на лыжном шасси (аэросани).
Известен реализуемый в известном устройстве способ управления движением транспортного средства, преобразуемого в летательный аппарат, который состоит в том, что движение транспортного средства при наземном режиме осуществляют с помощью силовой установки и колес при опущенных крыльях-стойках. При подготовке к полетному режиму крылья поднимают, обеспечивая тем самым взлетный угол атаки. В полетном режиме используют воздушный движитель, а управляют транспортным средством в полете с помощью стабилизатора и горизонтальных и вертикальных рулей. В состав транспортного средства входят корпус-кузов, шасси с колесами и приводом от силовой установки, движитель для создания тяги при полете, а также хвостовое оперение с горизонтальными и вертикальными рулями. Крыло выполнено в виде двух стоек, имеющих возможность поворота в вертикальной плоскости и снабженных набором аэродинамических элементов, участвующих в создании подъемной силы (см. патент РФ N 2025295, 6 Мкл. B 60 F 5/02, опубл. 1994 г.).
Недостатками известных способа и транспортного средства являются громоздкость многоэлементного крыла и его низкое аэродинамическое качество, не обеспечивающее управляемость, продольную и поперечную устойчивость транспортного средства при малых скоростях взлета и посадки, при отказах силовой установки или воздушного движителя и т.п.
Известен также реализуемый в известном устройстве и принятый в качестве прототипа способ управления движением транспортного средства, преобразуемого в летательный аппарат, согласно которому при движении в наземном режиме используют силовую установку для привода колес при условии минимальных габаритов корпуса-кузова с установленными вдоль него крыльями. При подготовке к полетному режиму крылья разворачивают и устанавливают в поперечном направлении под взлетным углом атаки. В полетном режиме используют воздушный движитель, а управляющие силы и моменты создают посредством горизонтальных и вертикальных рулей хвостового оперения. В состав транспортного средства, принятого за прототип, входят корпус-кузов, шасси с колесами, силовая установка с подключенным к ней воздушным движителем. Корпус-кузов транспортного средства снабжен выдвижным стабилизатором с двумя килями, а также убираемыми крыльями в виде полуконсолей с приводом для их размещения вдоль корпуса-кузова (см. патент РФ N 2016781, 6 Мкл. B 60 F 5/02, опубл. 1994 г.).
Недостатками известных способа и устройства являются малые размах и ширина крыльев, ограниченных длиной корпуса-кузова транспортного средства, а по ширине - его высотой, что снижает подъемную силу и аэродинамическое качество летательного аппарата, а также его продольную и поперечную устойчивость. Кроме этого в известных способе и устройстве не предусмотрена возможность изменения вектора тяги в пространстве. Эти недостатки ухудшают управляемость и продольную и поперечную устойчивость транспортного средства как в воздухе, так и на земле ввиду более узкой колеи колес. Вместе с тем крылья, устанавливаемые в походном (наземном) режиме вдоль корпуса-кузова, мешают входу и выходу из транспортного средства, затрудняют погрузку и выгрузку. Кроме этого искажается архитектурно-эстетический облик такого транспортного средства, например, как легковой автомобиль.
Технической задачей, на решение которой направлено изобретение, является улучшение управляемости, а также продольной и поперечной устойчивости транспортного средства в полетном режиме движения.
Поставленная техническая задача решается тем, что в способе управления движением транспортного средства, преобразуемого в летательный аппарат, заключающемся в том, что движение в наземном режиме осуществляют с помощью силовой установки и колес при условии размещения крыльев и стабилизатора хвостового оперения в пределах габаритов корпуса транспортного средства, при подготовке к полетному режиму хвостовое оперение и крылья выставляют в рабочее положение и ориентируют в пространстве под взлетным углом атаки, в полетном режиме используют воздушный движитель, а для создания управляющих сил и моментов при маневрировании, взлете и посадке применяют горизонтальные и вертикальные рули, согласно изобретению в полетном режиме дополнительно управляют направлением вектора тяги воздушного движителя путем изменения его ориентировки в системе координат, связанной с транспортным средством, а также изменением размаха его крыльев и длины любого крыла.
При этом одновременно с изменением направления вектора тяги изменяют ориентировку хвостового оперения с горизонтальными и вертикальными рулями.
Кроме этого поток воздуха, создаваемый воздушным движителем, направляют непосредственно на горизонтальные и вертикальные рули.
Вместе с этим изменение положения управляемых колес, горизонтальных и вертикальных рулей и направления вектора тяги осуществляют интегрально посредством совмещенного органа управления транспортного средства.
Поставленная техническая задача решается также тем, что транспортное средство, преобразуемое в летательный аппарат, содержащее корпус-кузов, имеющий в продольном сечении форму обтекаемого профиля, шасси с подвеской колес, силовую установку с трансмиссией, воздушный движитель, убираемые крылья в виде консолей с приводами и хвостовое оперение со стабилизатором, килем и горизонтальными и вертикальными рулями, установленное на закрепленном в корпусе-кузове консольном подвесе переменной длины, а также органы управления наземным и полетным режимами движения с контрольными приборами, согласно изобретению имеет убираемые крылья и стабилизатор хвостового оперения, которые выполнены мультиконсольными телескопическими с возможностью выдвижения их секций в поперечном направлении, при этом убираемые крылья и стабилизатор хвостового оперения собраны в соответствующую обойму, причем обойма убираемых крыльев установлена на корпусе-кузове транспортного средства и шарнирно соединена с приводами с возможностью изменения угла атаки крыла, а воздушный движитель установлен совместно с хвостовым оперением на консольном подвесе переменной длины с возможностью изменения пространственного угла между осью вращения движителя и продольной осью транспортного средства.
Для решения поставленной технической задачи приводы консольных секций телескопических убираемых крыльев и стабилизатора хвостового оперения могут быть выполнены в виде телескопических гидроцилиндров, установленных внутри соответствующей обоймы и консольных секций с возможностью взаимодействия последних с гидроприводом.
При этом мультиконсольные телескопические крылья могут быть выполнены с упругой круткой из условия увеличения угла атаки каждой последующей консольной секции в направлении к концевой секции.
Каждая из консольных секций убираемых крыльев может быть снабжена аэродинамическими концевыми шайбами.
Консольный подвес переменной длины воздушного движителя и хвостового оперения может быть выполнен в виде независимо управляемых гидроцилиндров, шарнирно связанных с корпусом воздушного движителя, один из которых выполнен базово позиционируемым с обеспечением определенного заданного вылета консольного подвеса.
Хвостовое оперение с горизонтальными и вертикальными рулями может быть жестко связано с корпусом воздушного движителя.
При этом горизонтальные и вертикальные рули могут быть установлены в воздушном потоке от движителя.
В варианте корпус-кузов, шасси с подвеской колес, силовая установка с трансмиссией, органы управления наземным и полетным режимами движения и контрольные приборы могут быть выполнены на базе автомобильных агрегатов и узлов.
Автомобильный корпус-кузов может быть выполнен крыловидным в продольном сечении с использованием прозрачного надкапотного обтекателя в форме предкрылка самолетного крыла.
Прозрачный надкапотный обтекатель и автомобильный корпус-кузов могут быть снабжены по бокам краевыми прозрачными аэродинамическими ширмами.
Транспортное средство может быть дополнительно снабжено составным аэродинамическим днищем с возможностью его выдвижения из корпуса-кузова совместно с консольным подвесом переменной длины.
Автомобильное шасси с подвеской колес может быть выполнено с возможностью подтягивания последних в корпус-кузов.
Органы управления траекториями наземного и полетного режимов движения могут быть совмещены на автомобильной рулевой колонке, поворотно закрепленной в продольной плоскости на шарнирной опоре с возможностью ее блокировки.
Воздушный движитель может быть выполнен кольцевым винтовентиляторным или капотируемым винтовым.
В варианте воздушный движитель может быть выполнен в виде пары воздушных движителей, связанных с телескопическим карданным валом с помощью трансмиссии.
В варианте транспортное средство может быть выполнено на базе переднеприводного автомобиля, дополнительно снабженного автономной силовой установкой, размещенной в багажном отделении и связанной трансмиссией с воздушным движителем посредством телескопического карданного вала.
В варианте транспортного средства на базе переднеприводного автомобиля оно может быть дополнительно снабжено рядом автономных силовых установок и связанных с ними соответствующих воздушных движителей.
Достижение поставленной технической задачи, а именно улучшение управляемости и продольной и поперечной устойчивости транспортного средства в полетном режиме, становится возможным благодаря тому, что предлагаемое устройство реализует управление направлением вектора тяги в полете, при взлете и посадке, т.к. имеется возможность изменять ориентировку воздушного движителя с помощью предусмотренных в его совместном с хвостовым оперением консольном подвесе переменной длины трех телескопических гидроцилиндров. Наряду с этим в устройстве предусмотрена конструкция убираемых крыльев, а также стабилизатора хвостового оперения, выполненных из консольных секций, втягивание и выдвижение которых осуществляется (в качестве одного из возможных вариантов) с помощью встроенных телескопических гидроцилиндров. Имея возможность изменять вектор тяги по направлению, а также изменять размах крыльев и длину любого крыла как в полете, так и при взлете и посадке, водитель-пилот получает возможность более эффективного управления полетным режимом в сочетании с максимальной продольной и поперечной устойчивостью аппарата в полете.
В качестве источника информации, определяющего уровень техники в области транспортных средств, преобразуемых в летательный аппарат, можно назвать книгу Бауэрс П. Летательные аппараты нетрадиционных форм. - М.: Мир, 1991 г. Многие описанные в ней конструкции транспортных средств сложны и не позволяют управлять направлением вектора тяги, создаваемого воздушным движителем (см., например, с. 277). Не предусмотрена в описанных конструкциях устройств и возможность изменять сам по себе размах крыльев. Таким образом, требование лучшей управляемости аппаратов и продольной и поперечной устойчивости их в полете в целом эффективно не решается.
Из уровня техники известны источники информации, в которых предлагаются технические решения, направленные на достижение возможности изменять вектор тяги летательного аппарата по направлению, см. , например, патент США N 5782431, М.кл. B 64 C 15/02, 1998 г. Однако решение поставленной технической задачи достигается иными средствами, а именно за счет изменения направления реактивной струи газа на выходе из турбореактивного двигателя посредством управляемых лопаток, при этом не предусмотрено изменение координат самого турбореактивного двигателя относительно корпуса летательного аппарата, что является не столь эффективным по сравнению с предлагаемым изобретением.
Изобретение поясняется чертежами.
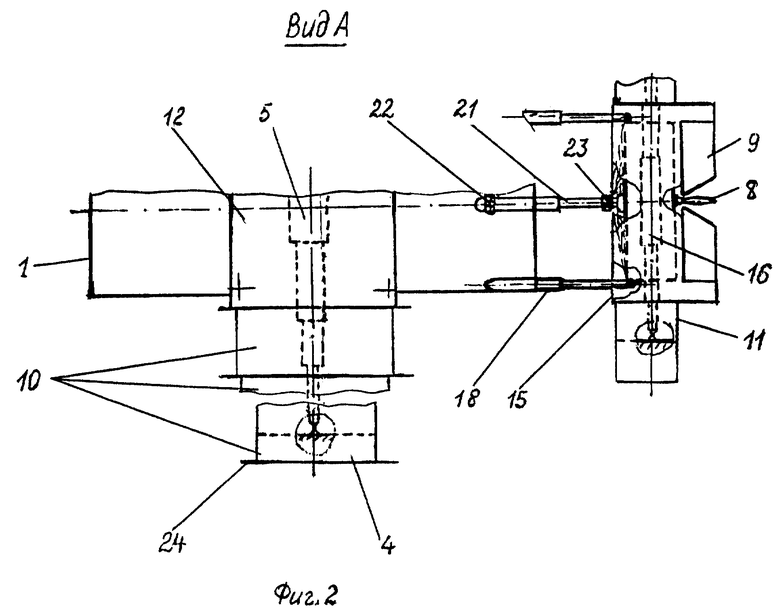
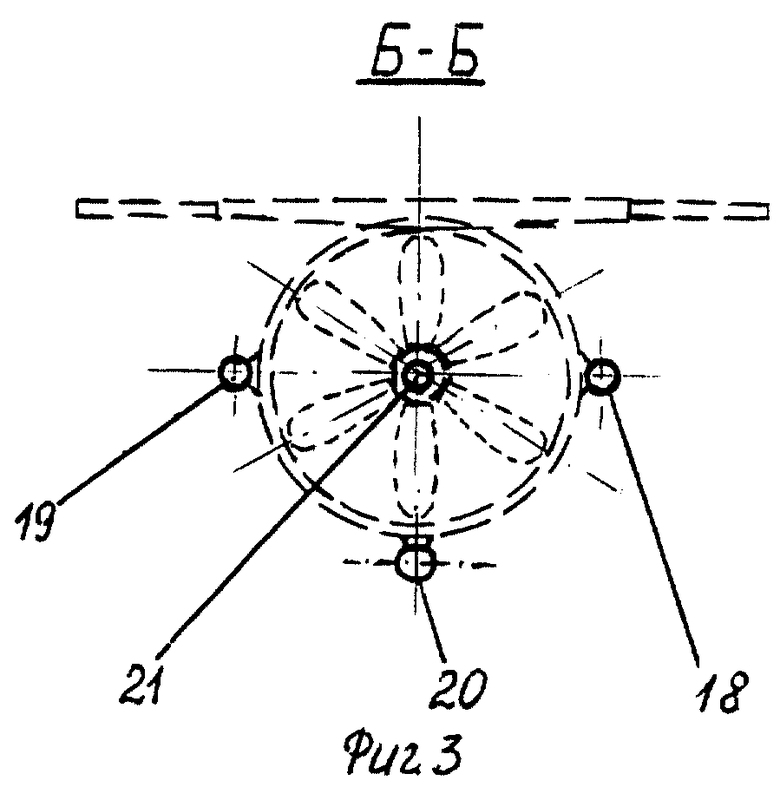
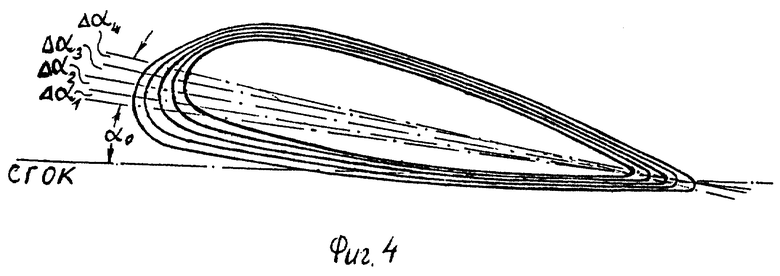
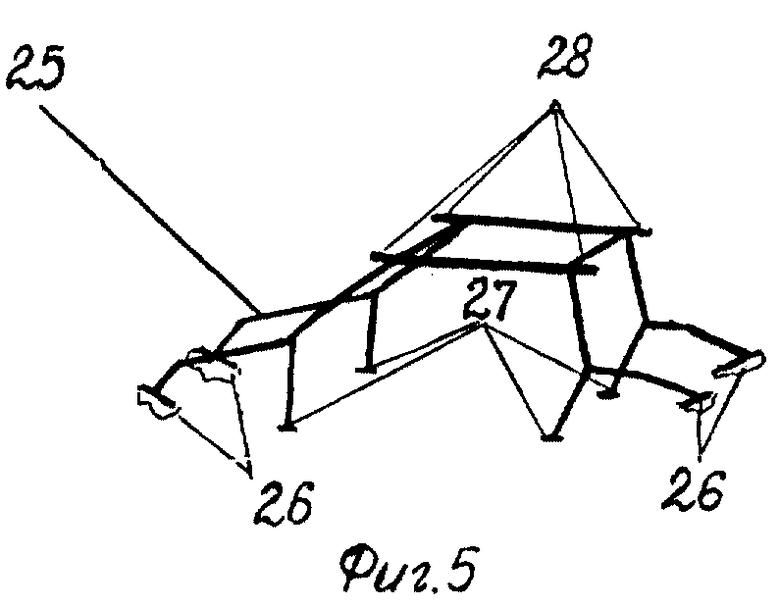
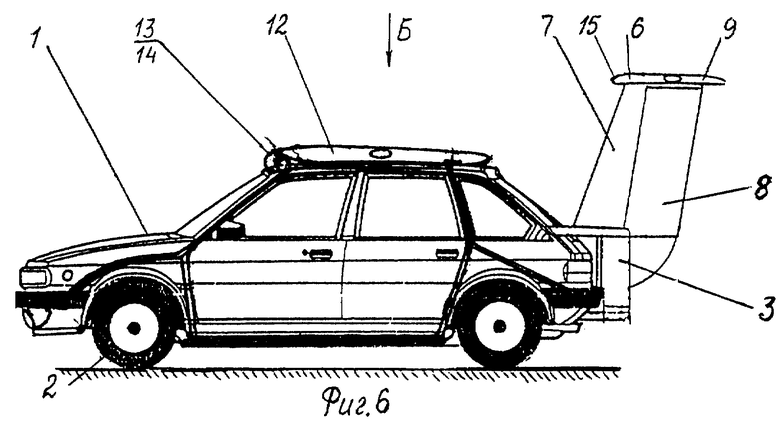
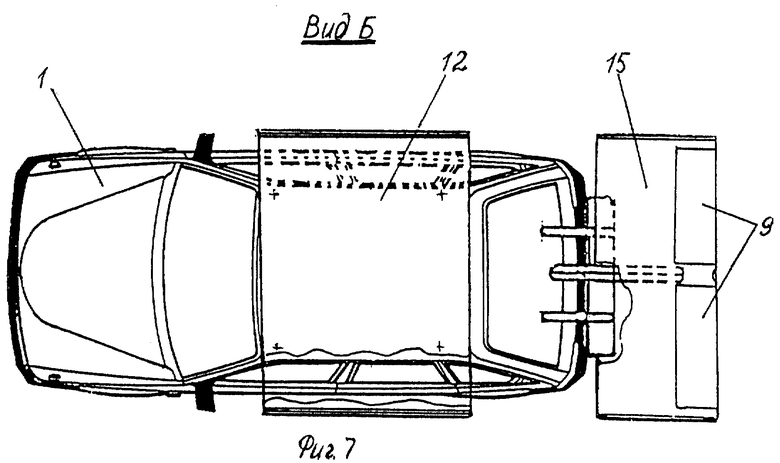
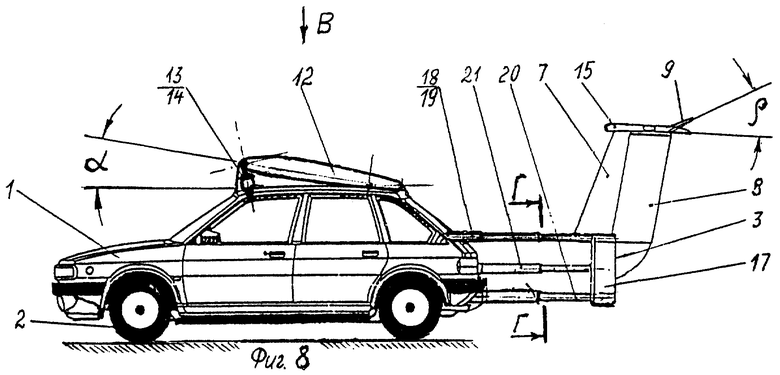
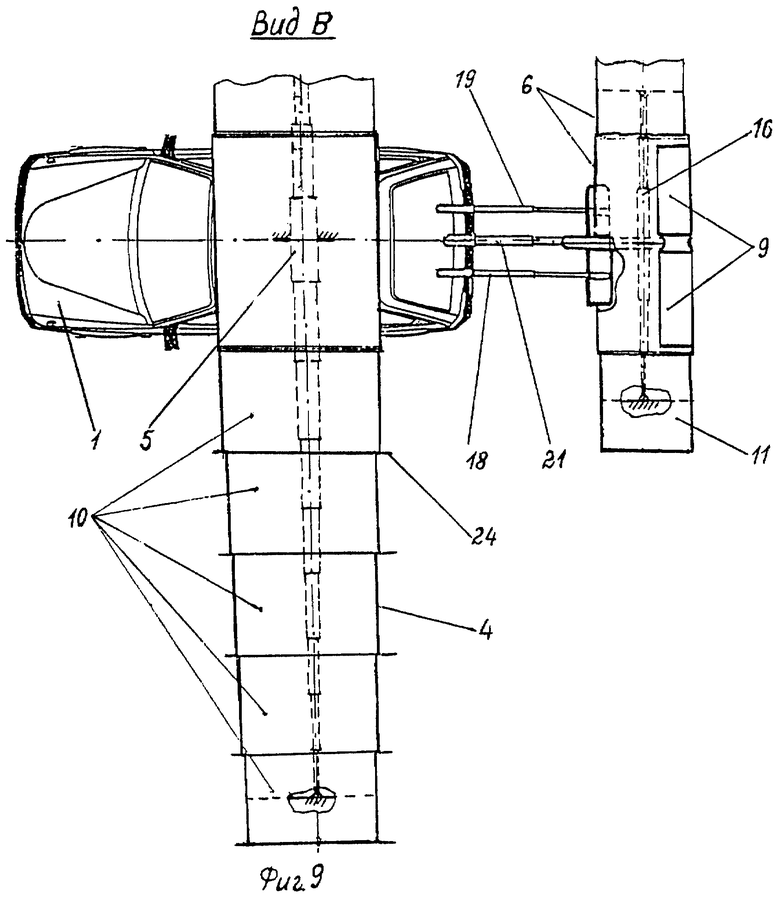
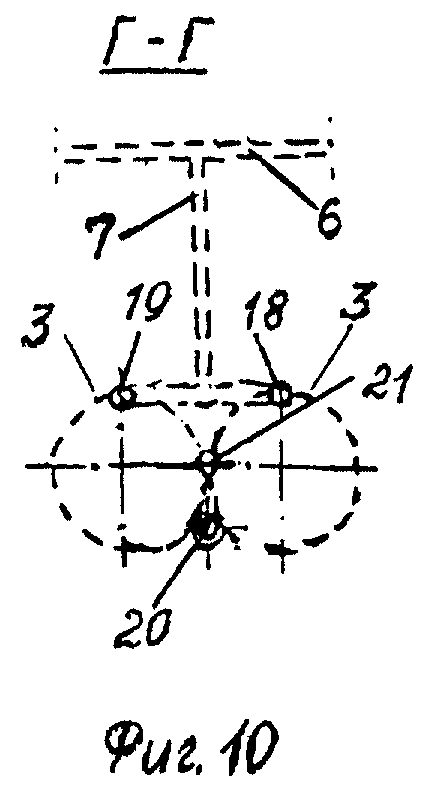
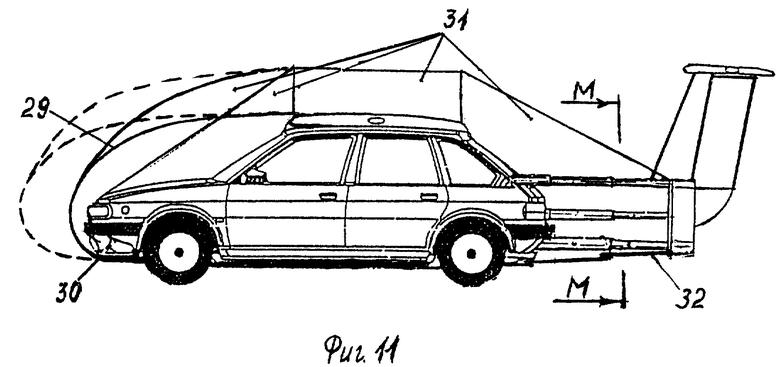
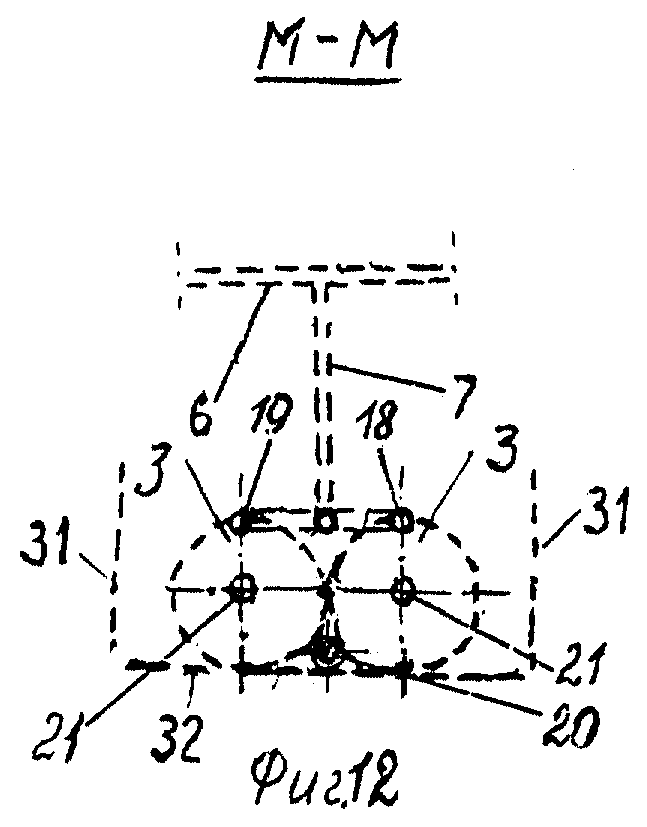
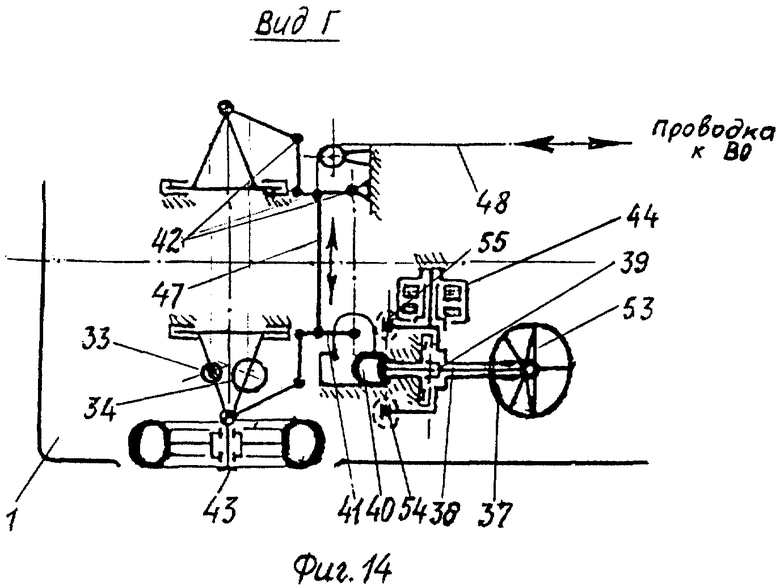
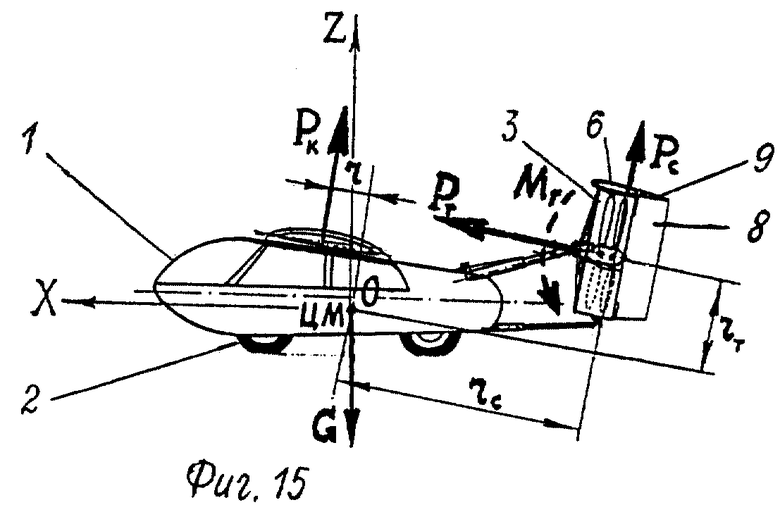
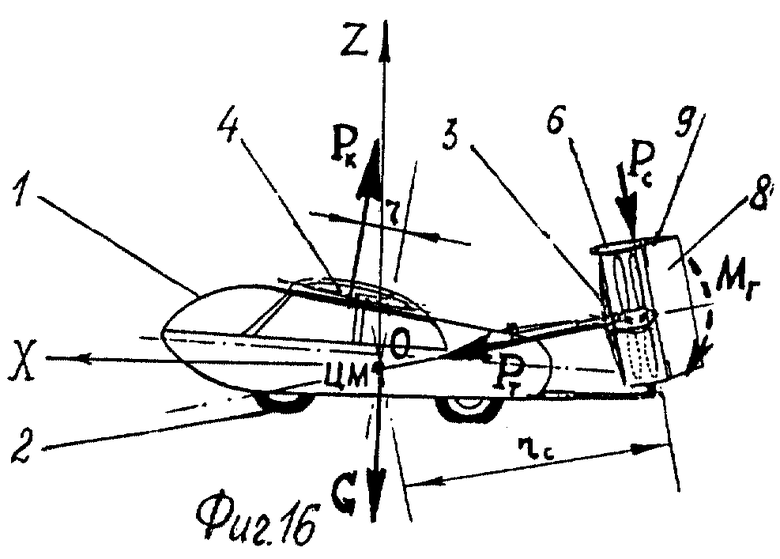
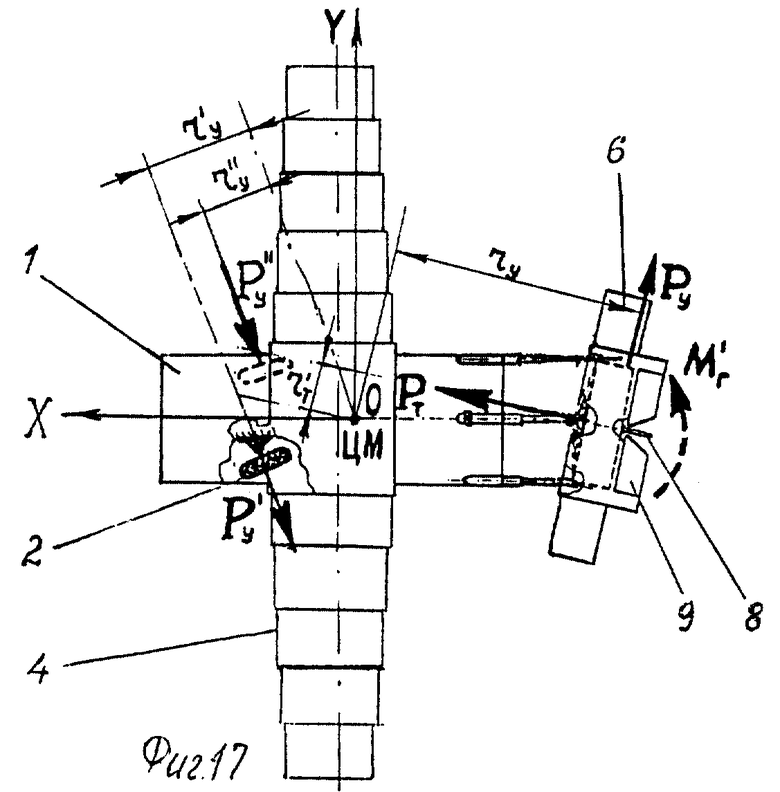
На фиг. 1 представлен общий вид транспортного средства, преобразуемого в летательный аппарат, с выдвинутым консольным подвесом при подготовке к полетному режиму движения; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 изображен рисунок с поперечными сечениями консольных секций убираемых крыльев в проекции на корневое сечение, поясняющий получение угла крутки у телескопических крыльев транспортного средства; на фиг. 5 представлен каркас жесткости автомобиля при его использовании в качестве базы для преобразования транспортного средства в летательный аппарат; на фиг. 6 изображен общий вид аэромобиля при наземном режиме движения; на фиг. 7 дан вид Б на фиг. 6; на фиг. 8 представлен общий вид аэромобиля при подготовке к полетному режиму движения; на фиг. 9 - вид В на фиг. 8; на фиг. 10 приведен разрез Г-Г на фиг. 8; на фиг. 11 изображен общий вид аэромобиля с использованием в качестве базы переднеприводного автомобиля, оснащенного двумя автономными силовыми установками, размещенными в багажном отделении и связанными каждая с соответствующим воздушным движителем карданным валом; на фиг. 12 - разрез М-М на фиг. 11; на фиг. 13 приведена схема рулевого управления транспортного средства, включающего функции штурвала самолета; на фиг. 14 - вид Г на фиг. 13; на фиг. 15, 16 и 17 изображены схемы, иллюстрирующие силы и моменты, действующие на транспортное средство при маневрах в полетном режиме движения с использованием пространственных перемещений и поворотов воздушного движителя и связанного с ним хвостового оперения.
На чертежах использованы следующие обозначения: СГОК - строительная горизонталь обоймы крыльев: αo - начальный угол смещения хорды профиля корневой секции убираемых крыльев в проекции на корневое сечение крыла; Δαi - приращения углов, образуемые хордами профилей консольных секций убираемых крыльев в проекции на корневое сечение крыла; α - угол атаки крыла; ρ - угол отклонения вертикальных рулей 9 хвостового оперения: Pпит - давление источника питания в гидроприводах консольного подвеса; Pупр - управляющее давление в электрогидравлическом преобразователе; Pл и Pп - рабочие давление в гидроприводах (левом и правом), связанных с перемещением воздушного движителя: БВМ - бортовая вычислительная машина, ГА - гидроаккумулятор; ГО - горизонтальное оперение: ВО - вертикальное оперение; Pк - подъемная сила, создаваемая несущей поверхностью крыльев летательного аппарата, Pт - свободная сила тяги (за вычетом сил сопротивления), создаваемая воздушным движителем; Pс - подъемная сила, создаваемая несущей поверхностью стабилизатора хвостового оперения; r, rт, r'т и rс - соответствующие плечи действия сил Pк, Pт и Pс; G - вес летательного аппарата; ЦМ - центр масс, точка приложения веса летательного аппарата; Pу, P'у и P''у - силы, создаваемые поверхностями вертикального оперения и управляемых колес; rу, r'у и r''у - плечи действия сил, создаваемых вертикальным оперением и управляемыми колесами; Mг и M'г - приведенные гироскопические моменты сопротивления, возникающие при изменении углов установки и координат воздушного движителя (в проекции на плоскость чертежа); X, Y и Z - оси системы координат, связанной с центром масс (ЦМ) транспортного средства; т.О - начальная точка отсчета координат, совмещенная с центром масс ЦМ.
Транспортное средство, преобразуемое в летательный аппарат, содержит корпус-кузов 1, имеющий в продольном сечении форму обтекаемого профиля, шасси с подвеской (на чертеже не обозначены) колес 2, силовую установку с трансмиссией (на чертеже не показаны), воздушный движитель 3, убираемые крылья 4 с приводом 5, хвостовое оперение со стабилизатором 6, килем 7, с горизонтальными и вертикальными рулями 8 и 9 соответственно. Хвостовое оперение установлено на консольном подвесе (на чертеже не обозначен) переменной длины. Для управления движением транспортного средства предусмотрены органы управления наземным и полетным режимами движения с контрольными приборами (на чертеже не показаны). Согласно изобретению убираемые крылья 4 и стабилизатор 6 хвостового оперения выполнены мультиконсольными телескопическими и состоят из консольных секций 10 и 11 соответственно. При наземном (дорожном) режиме движения убираемые крылья 4 собраны в обойму 12, установленную на корпусе-кузове 1. При этом обойма 12 убираемых крыльев 4 шарнирно соединена с парой приводов 13 и 14, закрепленных на корпусе-кузове 1 с возможностью изменения угла атаки убираемых крыльев 4 в предполетном и полетном режимах движения. Стабилизатор 6 хвостового оперения в собранном виде также представляет собой обойму 15. Сложенные в обоймы 12 и 15 консольные секции 10 и 11 убираемых крыльев 4 и стабилизатора 6 хвостового оперения соответственно имеют возможность их выдвижения в поперечном направлении в горизонтальной плоскости с помощью соответствующих приводов 5 и 16. Воздушный движитель 3 транспортного средства установлен на консольном подвесе переменной длины совместно с хвостовым оперением, стабилизатор 6 которого жестко связан с корпусом 17 воздушного движителя 3. Консольный подвес переменной длины дает возможность изменять пространственный угол между осью вращения воздушного движителя 3 и продольной осью транспортного средства благодаря тому, что выполнен на базе независимо управляемых телескопических гидроприводов: двух верхних - 18, 19 и одного нижнего - 20. Последний является базово позиционируемым и обеспечивает определенный заданный вылет консольного подвеса за пределы корпуса-кузова 1 по условиям балансировки транспортного средства и координации его центра масс ЦМ. Гидроприводы 18 и 19 упруго-шарнирно закреплены (преимущественно на сайлентблоках) в корпусе-кузове 1 и шарнирно связаны с корпусом 17 воздушного движителя 3, а гидропривод 20 жестко закреплен в корпусе-кузове 1 и шарнирно связан с корпусом 17 воздушного движителя 3. Привод воздушного движителя 3 от силовой установки осуществляется посредством трансмиссии и телескопического карданного вала 21 с карданами 22 и 23. Благодаря последним осуществляется возможность работы воздушного движителя 3 при его пространственных угловых перемещениях относительно продольной оси транспортного средства в полетном режиме.
Приводы 5 и 16 убираемых крыльев 4 и стабилизатора 6 хвостового оперения соответственно выполнены в виде одноименных телескопических гидроцилиндров 5 и 16, установленных внутри соответствующей обоймы 12 и 15 и самих консольных секций 10 и 11 с возможностью их взаимодействия с соответствующим гидроприводом 5 и 16. При этом рабочие органы гидроприводов 5 и 16, а именно многоступенчатые штоки-цилиндры (на чертеже не обозначены), выполняют функции лонжеронов - конструктивных элементов жесткости мультиконсольных убираемых крыльев 4, а также демпфирующих устройств продольных и крутильных осцилляций консольных секций 10 и 11 (см. фиг. 1-3).
Консольные секции 10 убираемых крыльев 4 выполнены с упругой круткой, обеспечивающей в выдвинутом из обоймы 12 состоянии увеличение угла атаки каждой последующей секции в направлении к концевой. Тонкостенный профиль консольных секций 10 позволяет это осуществить без затруднений. Угол αo, отсчитываемый от строительной горизонтали СГОК обоймы 12 убираемых крыльев 4, получает приращения Δα1,Δα2,Δα3, и т.д. от соответствующих консольных секций 10 в позиции их полного выдвижения (см. фиг. 4).
Хвостовое оперение со стабилизатором 6, килем 7, горизонтальными и вертикальными рулями 8 и 9 соответственно, жестко связано с корпусом 17 воздушного движителя 3. При этом горизонтальные и вертикальные рули 8 и 9 соответственно, установлены полностью или частично в воздушном потоке от воздушного движителя 3.
Каждая из консольных секций 10 убираемых крыльев 4 снабжена аэродинамическими концевыми шайбами 24. Последние кроме прямого своего назначения, а именно организации необходимого режима обтекания потоков воздуха без срывов с профиля крыла, выполняют и роль поперечных конструктивных элементов жесткости крыла - нервюр.
В качестве варианта в предлагаемом транспортном средстве, преобразуемом в летательный аппарат, его корпус-кузов 1, шасси с подвеской колес 2, силовая установка с трансмиссией, органы управления наземным и полетным режимами движения и контрольные приборы выполнены на базе одноименных автомобильных агрегатов и узлов.
Для надежной установки обоймы 12 убираемых крыльев 4 может быть задействован каркас 25, жестко связанный с силовыми элементами 26 несущего корпуса-кузова 1 автомобиля, например, с площадками-опорами 27 под домкраты. Сверху на каркасе 25 монтируется шарнирно обойма 12 убираемых крыльев 4. Причем передние шарнирные опоры (на чертеже не обозначены) выполнены с приводами 13 и 14 углового перемещения обоймы 12 для установки и регулирования угла атаки α. При этом используются монтажные опоры 28 (см. фиг. 5). Иными словами, взяв за базу транспортное средство - автомобиль, содержащий названные выше агрегаты и узлы, являющийся транспортным средством массового производства и широко применяемым для передвижения и перевозок, можно дооснастить его определенным набором оборудования и, таким образом, преобразовать в средство для осуществления полетного режима движения - аэромобиль. Приспособленный для наземного режима движения автомобиль для осуществления полетных функций необходимо оснастить рядом модулей, а именно обоймами 12 и 15 убираемых крыльев 4 и стабилизатора 6 хвостового оперения соответственно, консольным подвесом переменной длины в виде трех телескопических гидроцилиндров 18, 19 и 20 и воздушным движителем 3 с телескопическим карданным валом 21 с карданами 22 и 23 (см. фиг. 1, 6-10).
Для лучшей обтекаемости аэромобиля в полете предусматривается выполнять корпус-кузов 1 крыловидным в продольном сечении, для чего используется надкапотный прозрачный обтекатель 29 с механизмом 30 его выдвижения с целью удлинения корпуса-кузова 1 в полете для увеличения его подъемной силы, а также для управления последней дополнительно к основной составляющей от крыльев 4. Прозрачный обтекатель 29 установлен над капотом аэромобиля и имеет форму предкрылка самолетного крыла. В выдвинутом состоянии прозрачный обтекатель 29 показан штриховой линией (см. фиг. 11).
Для формирования воздушного потока над корпусом-кузовом надкапотный прозрачный обтекатель 29 и корпус-кузов 1 аэромобиля снабжены по бокам прозрачными ширмами 31, выполняющими функции аэродинамических шайб. Конструктивно прозрачные аэродинамические ширмы 31 могут быть выполнены убирающимися с возможностью их выдвижения при подготовке к полетному режиму движения.
В аэромобиле также дополнительно предусмотрено выдвижное составное аэродинамическое днище 32, которое шарнирно связано с гидроцилиндром 20. Составное аэродинамическое днище 32 выполнено из нескольких профилированных элементов, взаимодействующих между собой, например по типу "ласточкина хвоста". Оно имеет возможность выдвижения из корпуса-кузова 1 совместно с воздушным движителем 3 при выдвижении консольного подвеса в виде телескопических гидроцилиндров 18, 19 и 20. При этом аэродинамическое днище 32 может образовывать с аэродинамическими ширмами 31 канал, направляющий поток воздуха на воздушный движитель 3 (см. фиг. 12).
Для создания лучших условий обтекания автомобильного корпуса-кузова 1 в полетном режиме автомобильное шасси с подвеской колес 2 выполнено с возможностью подтягивания последних в корпус-кузов 1. Для выполнения этой функции может использоваться, например, специальный гидропривод, встроенный в амортизатор 33 и сжимающий пружину 34 подвески колес 2 (фиг. 13 и 14).
В случае аэромобиля органы управления траекториями наземного и полетного режимов движения совмещены на автомобильной рулевой колонке 35, поворотно закрепленной на шарнирной опоре 36 в продольной плоскости (см. фиг. 13 и 14) с возможностью ее блокировки.
Органы управления траекториями наземного и полетного режимов движения аэромобиля совмещают функции рулевого управления автомобилем и штурвала самолета. В состав органов управления входят рулевое колесо 37, установленное на рулевом валу 38, который размещен в рулевой колонке 35. Рулевое колесо 37 через рулевой вал 38 с карданом 39 связан с приводом 40, сошкой 41, шарнирами 42 и осью 43 колеса 2. Одновременное выполнение функций штурвала самолета рулевой колонкой 35 обеспечивается за счет шарнирной опоры 36, снабженной блокирующим устройством 44, действующим в наземном режиме движения транспортного средства. Рулевая колонка 35 с вилкой 45 связана тросом 46 с вертикальными рулями 8 хвостового оперения. Связь с горизонтальными рулями 9 хвостового оперения обеспечивается, например, посредством поперечной тяги 47 и троса 48.
В состав органов управления входят также электрогидравлический преобразователь 49, управляемый от бортовой вычислительной машины БВМ (на чертеже не показана) через входной блок 50, и имеющий связь с гидроцилиндрами 18 и 19, управляющими вектором тяги воздушного движителя 3 в горизонтальной плоскости. В электрогидравлическом преобразователе 49 с гидроаккумулятором ГА (на чертеже не показан) имеются каналы 51 связи, а именно односторонние каналы подачи давления питания Pпит и управляющего давления Pупр, а также двухсторонние каналы связи Pл и Pп левым и правым гидроцилиндрами 18 и 19. К бортовой вычислительной машине БВМ подключены также датчики 52 наклона и поворота рулевого колеса-штурвала 37. При этом рулевое колесо 37 снабжено планкой 53 ручной корректировки углов крена при маневрировании аэромобиля за счет изменения длины соответствующего крыла.
Кроме этого в единой системе гидравлического управления предусмотрены гидравлические преобразователи 54 и 55 синхронного управления гидроцилиндрами 18 и 19, изменяющими направление вектора тяги в вертикальной плоскости.
Воздушный движитель 3 аэромобиля выполнен кольцевым винтовентиляторным или капотируемым винтовым с учетом того, что при малых стартовых скоростях, характерных для автомобилей на дорогах при разгоне, а также при посадке, такие движители более эффективны, чем обычные винтовые.
В качестве варианта воздушный движитель 3 может быть выполнен в виде пары воздушных движителей с учетом необходимой их суммарной мощности (см. фиг. 8-10). При этом воздушные движители 3 связаны с телескопическим карданным валом 21 с помощью трансмиссии, например, выполненной в виде цепной передачи (на чертеже не показана).
В варианте исполнения в качестве исходного транспортного средства за базу может быть принят переднеприводный автомобиль. В этом случае транспортное средство может быть дополнительно снабжено автономной силовой установкой (на чертеже не показана), являющейся приводом для воздушного движителя 3, подключенного к силовой установке посредством трансмиссии и телескопического карданного вала 21 (см. фиг. 8-12).
На базе переднеприводного автомобиля с воздушным движителем 3, снабженным автономной силовой установкой, может быть реализована схема, когда транспортное средство дополнительно снабжено рядом автономных силовых установок и связанных с ними соответствующих воздушных движителей 3, например еще одной автономной силовой установкой (на чертеже не показана) и связанным с ней воздушным движителем 3. В этом случае, используя для каждого воздушного движителя 3 свою автономную силовую установку и обеспечивая их автономное управление, водитель-пилот получает возможность управлять транспортным средством в полетном режиме с большей эффективностью. В обоих описанных выше вариантах силовые установки, например роторно-поршневые двигатели, могут быть размещены в багажном отделении аэромобиля, обеспечивая приемлемую компоновку транспортного средства в целом (см. фиг. 11 и 12).
В качестве контрольных приборов могут быть использованы автомобильные, например спидометр, задействованный как в наземном, так и в полетном режимах движения, а также самолетные, такие как высотомер, авиагоризонт и др.
Способ управления движением транспортного средства, преобразуемого в летательный аппарат, реализуется в устройстве следующим образом.
При наземном режиме движения транспортное средство используется в качестве автомобиля, перемещаясь по дороге с помощью шасси с подвеской колес 2 с приводом их от штатной силовой установки. В этом случае мультиконсольные телескопические крылья 4 втянуты в обойму 12, размещенную сверху на корпусе-кузове 1. Таким же образом собран в обойму 15 и стабилизатор 6 хвостового оперения. При этом консольный подвес переменной длины с установленными на нем воздушным движителем 3 и хвостовым оперением со стабилизатором 6, килем 7, горизонтальными и вертикальными рулями 8 и 9 соответственно, имеет минимальный вылет за пределы корпуса-кузова 1 транспортного средства, общие габариты которого являются в этом случае минимальными, а архитектурно-эстетический облик наиболее близок к автомобильному.
При подготовке транспортного средства к полетному режиму движения водитель-пилот поэтапно осуществляет синхронное выдвижение гидроцилиндров 18, 19 и 20 консольного подвеса. Базово позиционируемый гидроцилиндр 20 определяет необходимый вылет консольного подвеса и соответствующее выдвижение гидроцилиндров 18 и 19 за пределы корпуса-кузова 1, балансируя при этом координату центра масс и обеспечивая подготовку воздушного движителя 3 к включению. Затем с помощью телескопических гидроцилиндров 5 водитель-пилот осуществляет выдвижение из обоймы 12 консольных секций 10 убираемых крыльев 4, а с помощью телескопических гидроцилиндров 16 - консольных секций 11 стабилизатора 6 хвостового оперения. Транспортное средство начинает разгоняться, как правило, за счет тяги на колесах 2, а при достижении необходимой скорости с помощью приводов 13 и 14 крылья 4 устанавливаются под взлетным углом атаки, включается воздушный движитель 3 и осуществляется взлет. В исключительных случаях преимущественно при слабом сцеплении колес 2 с опорной поверхностью (мокрая или скользкая дорога, грязь на местности и т.п.) транспортное средство может разгоняться с помощью воздушного движителя, используя наиболее высокий КПД винтовентиляторного движителя 3 при малых скоростях движения. При этом действия водителя-пилота практически не отличаются от описанного выше основного варианта подготовки и осуществления взлета.
Водитель-пилот, управляя движением в полетном режиме, использует для этого горизонтальные и вертикальные рули 8 и 9 соответственно, создавая управляющие силы и моменты.
Кроме этого у водителя-пилота имеется возможность с помощью гидроцилиндров 18 и 19 (при фиксированном положении гидроцилиндра 20), действуя ими синхронно или асинхронно, а также синхронно и одновременно асинхронно, целенаправленно изменять ориентировку воздушного движителя 3 в системе координат, связанной с транспортным средством. Тем самым изменяется направление вектора тяги воздушного движителя 3, что делает управление транспортным средством в полете более эффективным и безопасным. Вместе с тем повороты руля-штурвала 37 влево-вправо вызывают повороты и управляемых колес 2, что дополнительно облегчает маневры транспортного средства в полетном режиме.
В качестве устройств, создающих управляющие моменты в полетном режиме, используется и стабилизатор 6 и киль 7 хвостового оперения, поскольку они жестко связаны с корпусом 17 воздушного движителя 3 и меняют свою ориентировку в пространстве вместе с последним в результате работы консольного подвеса переменной длины. С помощью стабилизатора 6 и киля 7 хвостового оперения создаются моменты, дополнительные к тем, которые создаются воздушным движителем 3. Тем самым можно меньшими угловыми перемещениями воздушного движителя 3 в сочетании с теми же угловыми перемещениями стабилизатора 6 и киля 7 хвостового оперения достигать необходимого изменения вектора тяги и управляющих моментов, а, следовательно, и траектории транспортного средства в полете.
Организация работы горизонтальных и вертикальных рулей 8 и 9 соответственно, при их установке непосредственно в воздушном потоке от воздушного движителя 3 является наиболее эффективной, поскольку на соответствующие горизонтальные и вертикальные рули 8 и 9 попадает более скоростной поток после воздушного движителя 3. В конечном итоге для создания управляющих сил и моментов становятся достаточными небольшие перемещения горизонтальных и вертикальных рулей 8 и 9. Тем самым повышается чувствительность интегральной системы управления к управляющим действиям водителя-пилота.
Кроме перечисленного водитель-пилот при управлении полетным режимом имеет возможность изменять размах крыльев 4, втягивая или выдвигая консольные секции 10 с помощью телескопических гидроцилиндров 5 на заданную длину. Так при взлете и при посадке размах крыльев 4 устанавливается максимальным, чтобы обеспечить максимальное значение подъемной силы при достигнутой скорости разгона или посадки. При выходе на установившийся полетный режим размах крыльев 4 и их аэродинамическое сопротивление могут быть уменьшены, а скорость транспортного средства - увеличена. Элементы жесткости мультиконсольных телескопических крыльев 4 и стабилизатора 6 хвостового оперения - соответствующие телескопические гидроцилиндры 5 и 16 с их рабочими органами - штоками-камерами (на чертеже не обозначены) позволяют организовать перемещение соответствующих консольных секций 10 и 11 не только в порядке очередности, но и в любом ином порядке с учетом требуемого полетного режима, а также для борьбы с вредными осцилляциями (флаттером).
Помимо этого мультиконсольная конструкция убираемых крыльев 4 позволяет изменять длину любого крыла транспортного средства. При этом условии создается разница в составляющих подъемной силы, действующих на левое и правое крыло. При необходимости возникающий в результате одностороннего изменения длины крыльев момент может быть использован для поворота транспортного средства вокруг своей продольной оси с целью получения угла крена по типу самолетного перед совершением поворотного маневра.
При всех операциях по управлению транспортным средством в наземном и полетном режимах движения, а именно изменении положения управляемых колес 2, горизонтальных и вертикальных рулей 8 и 9, стабилизатора 6 и киля 7 хвостового оперения, а также направления вектора тяги водитель-пилот использует интегральный (совмещенный) орган управления по типу рулевое колесо-штурвал 37 (см. фиг. 13 и 14).
В интегральном органе управления предусмотрен рулевой вал 38 с шарнирной опорой 36, связанный как с приводом 40 управляемых колес 2, так и с тросами 48 и 46 горизонтальных и вертикальных рулей 8 и 9 соответственно (ГО и ВО). Одновременно рулевой вал 38 имеет связь с электрогидравлическим преобразователем 49 и механогидравлическими преобразователями 54 и 55, управляющими выдвижением гидроцилиндров 18 и 19. Электрогидравлический преобразователь 49 может использоваться в автоматическом режиме с управлением от бортовой вычислительной машины (БВМ) по сигналам от датчиков 52 угла наклона и поворота руля-штурвала 37. Механогидравлические преобразователи 54 и 55 используются преимущественно при ручном режиме управления.
На транспортное средство в полетном режиме воздействуют различные силы по всем шести степеням свободы относительно связанной с ним системы координат. В общем случае динамика такого аэромобиля с управлением изменением направления силы тяги P определяется 14-ю нелинейными дифференциальными уравнениями второй степени, решение которых доступно с помощью бортовой вычислительной машины (БВМ). Упрощение решений достижимо путем применения известного метода малого параметра и метода тяг Н.Е.Жуковского (см., например, в кн. И. Б.Остославский. "Аэродинамика самолета". - М.: Оборонгиз, 1957. - С. 560). Так в первом приближении достаточно принять во внимание основные силы, действующие на аэромобиль и вызывающие его повороты в плоскостях XOZ и XOY (см. фиг. 15, 16 и 17). К таким силам относятся подъемная сила Pк, создаваемая посредством крыльев 4, действующая относительно центра масс ЦМ на радиусе r, вес аппарата G, приложенный в центре его масс, сила тяги Pт воздушного движителя 3, действующая на плечах с радиусами rт и r'т, и подъемная сила Pс, создаваемая с помощью несущей поверхности стабилизатора 6 хвостового оперения, а также управляющие силы в горизонтальной плоскости Pу, P'у и P''у, действующие на плечах rу, r'у и r''у соответственно. Все перечисленные основные воздействующие силы определяют равнодействующую силу и создают относительно центра масс ЦМ транспортного средства соответствующие им моменты, которые суммируются по правилам теоретической механики (кинетостатика):
- в вертикальной плоскости XOZ:
- в горизонтальной плоскости XOY:
определяя изменения траекторий полета по управляющим воздействиям водителя-пилота и командам бортовой вычислительной машины БВМ.
При совершении транспортным средством быстрых маневров к действующим силам и моментам добавляются гироскопические моменты сопротивления Mг и M'г от поворотов плоскости вращения воздушного движителя 3, т.е. реакции, связанные с прецессией и нутациями оси вращения последнего. Эти реакции могут купироваться в определенной степени путем соответствующего программирования командных сигналов бортовой вычислительной машины БВМ с учетом требуемых и задаваемых скоростей изменения положения воздушного движителя 3 в пространстве относительно координат, связанных с аэромобилем.
Знаки "+" в уравнениях моментов определяют подъем аэромобиля, например, при взлете (фиг. 15), или поворот влево (против часовой стрелки), как видно на фиг. 17. Знаки "-" в тех же уравнениях означают спуск (например, при посадке) или поворот вправо. Частный случай при Pт•rт = 0 (см. фиг. 16) соответствует возможностям безопасной акробатики на аэромобиле (в рамках норм летной годности).
В случае варианта исполнения транспортного средства, преобразуемого в летательный аппарат, когда в качестве исходного объекта используется автомобиль, работа последнего происходит аналогично описанному выше общему случаю. В частности режим посадки аэромобиля заключается в снижении высоты и скорости полета и осуществляется в обратном взлету порядке.
При этом наземный режим движения осуществляется обычным для автомобиля образом с использованием его энергетического оборудования и органов управления с помощью автомобильного шасси с колесами 2. Для осуществления полетного режима водитель-пилот приводит во вращение воздушный движитель 3. Одним из наиболее предпочтительных вариантов конструкции последнего для аэромобиля могут быть выбраны воздушный кольцевой винтовентиляторный движитель или капотируемый винтовой, поскольку они на небольших, как у автомобиля, скоростях имеют наиболее высокий КПД, что очень важно при осуществлении устойчивого взлета и посадки. После выдвижения консольных секций 10 и 11 убираемых крыльев 4 и стабилизатора 6 хвостового оперения, соответственно, водитель-пилот осуществляет взлет. При продолжительном времени полета водитель-пилот может воспользоваться возможностью убрать колеса 2 в ниши, предусмотренные в корпусе-кузове 1, задействовав гидропривод, встроенный в амортизатор 33 и сжимающий пружину 34 подвески колес 2. Такой прием позволит снизить энергетические затраты в целом.
Аналогично описанному общему случаю решаются вопросы управляемости и продольной и поперечной устойчивости аэромобиля в полете.
Адаптация водителя-пилота к органам управления осуществляется с использованием рулевой колонки 35, установленной на шарнирной опоре 36 по типу штурвала самолета. При этом при повороте рулевого колеса 37 момент вращения передается с помощью рулевого вала 38 с карданом 39 на рулевой привод 40, далее посредством сошки 41 и шарниров 42 - на шкворень оси 43 поворота колеса 2. Фиксация рулевой колонки 35 при наземном режиме движения осуществляется с помощью блокирующего устройства 44, представляющего собой упругий торсион, охваченный электромагнитным сцеплением. В полетном режиме движения блокировка снимается, что дает возможность рулевой колонке 35 и рулевому валу 38 совершать как вращательное движение, так и поступательное. При этом водитель-пилот в ручном режиме, задействовав механогидравлические преобразователи 54 и 55, управляет работой гидроцилиндров 18 и 19, а, следовательно, координатой воздушного движителя 3 и, как результат - направлением вектора тяги. Одновременно имеется возможность через вилку 45 посредством троса 46 обеспечить связь с вертикальными рулями 8. Поворачивая рулевое колесо-штурвал 37, водитель-пилот через тягу 47 посредством троса 48 регулирует положение горизонтальных рулей 8. С помощью планки 53 водитель-пилот имеет возможность вручную корректировать угол крена летательного аппарата в полетном режиме за счет изменения длины соответствующего крыла (левого или правого). В автоматическом режиме для управления координатами в полете водитель-пилот использует управление от бортовой вычислительной машины БВМ, управляющей электрогидравлическим преобразователем 49 по сигналам от датчиков 52 наклона и поворота рулевого колеса-штурвала 37.
Если корпус-кузов 1 автомобиля выполнен крыловидным в продольном сечении за счет использования прозрачного надкапотного обтекателя 29 в форме предкрылка самолетного крыла, то существенно повышается аэродинамическое качество аэромобиля вследствие более совершенной обтекаемой формы, что позволяет формировать воздушные потоки сверху и снизу корпуса-кузова 1, необходимые для создания значительной дополнительной подъемной силы. Так в варианте аэромобиля, в котором надкапотный обтекатель 29 и корпус-кузов 1 снабжены прозрачными краевыми ширмами 31 по бокам, аэромобиль защищен от поперечных стеканий воздушных потоков, участвующих в создании необходимой подъемной силы. Выдвижение надкапотного обтекателя 29 осуществляется механизмом 30 его выдвижения.
При снабжении аэромобиля составным аэродинамическим днищем 32 появляется дополнительная возможность улучшить обтекание воздушным потоком днища корпуса-кузова 1. Выдвижение аэродинамического днища 32 осуществляется в процессе выдвижения телескопического гидропривода 20 и обеспечивает увеличение несущей поверхности корпуса-кузова 1 транспортного средства (аэромобиля).
В варианте выполнения транспортного средства на базе автомобиля, когда воздушный движитель 3 выполнен в виде пары воздушных движителей, связанных с приводным телескопическим карданным валом 21 с помощью трансмиссии в виде, например, цепной передачи, предоставляется возможность использовать воздушные движители меньшей мощности и размеров. На такой основе можно повысить число оборотов воздушного движителя 3, уменьшить передаточное число трансмиссии и ее массу, а главное - понизить точку центра масс конструкции консольного подвеса, состоящей из пары движителей и хвостового оперения, приблизив его по вертикали к положению общего центра масс всего летательного аппарата. При этом однозначно повышается продольная устойчивость аэромобиля.
В варианте выполнения аэромобиля на базе переднеприводного автомобиля привод воздушного движителя 3 можно осуществлять от дополнительно размещаемой в багажном отделении транспортного средства автономной силовой установки посредством трансмиссии, снабженной телескопическим карданным валом 21. При такой организации работы воздушного движителя 3 его функционирование можно считать более надежным в случае отказа в полетном режиме основной силовой установки.
В варианте переднеприводного автомобиля, дополнительно снабженного рядом автономных силовых установок и связанных с ними соответствующих воздушных движителей 3, аэромобиль будет сочетать в себе одновременно свойства повышенной безопасности и дополнительной управляемости вектором тяги за счет изменения параметров работы автономных силовых установок. Таких пар, составленных из автономных силовых установок и связанных с ними воздушных движителей, может быть несколько, а именно и три, и четыре - в зависимости от технических характеристик последних.
Таким образом, транспортное средство, выполненное согласно изобретению с консольным подвесом, обеспечивающим в полетном режиме движения изменение ориентировки воздушного движителя и хвостового оперения относительно системы координат, связанной с транспортным средством, а также с оригинальной конструкцией выдвижных мультиконсольных крыльев и с интегральным органом управления положением управляемых колес, горизонтальных и вертикальных рулей и направлением вектора тяги, позволяет реализовать заявляемый способ управления движением. При этом реализация описанного способа в заявленном устройстве позволяет решить поставленную техническую задачу, а именно повысить управляемость и продольную и поперечную устойчивость аппарата в полетном режиме движения за счет расширения предоставляемых изобретением технических возможностей для управления. Транспортное средство, выполненное согласно изобретению и реализуемое на базе автомобиля, иначе - аэромобиль, является наиболее вероятным базовым вариантом. Причем выполненный в герметичном исполнении аэромобиль может использоваться как в надводных, так и в подводных условиях. В последнем случае размах крыльев и скорость вращения воздушного движителя будут иметь минимальные значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗУЕМОЕ НАЗЕМНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2507084C2 |
| АЭРОМОБИЛЬ | 2007 |
|
RU2385807C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1991 |
|
RU2016781C1 |
| СОСТАВНОЕ ЛЕТАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2019 |
|
RU2725866C1 |
| МЕХАНИЗМ ПОДВИЖНОГО КРЕПЛЕНИЯ ВИНТА В НАСАДКЕ АМФИБИЙНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2341406C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ПРЕОБРАЗУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2125523C1 |
| АВТОПЛАНЕР | 2011 |
|
RU2468933C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |

Изобретение относится к транспортному машиностроению и касается преобразования транспортного средства в летательный аппарат. Способ состоит в том, что наземное движение осуществляют с помощью силовой установки и колес. Крылья и стабилизатор размещают в пределах габаритов корпуса-кузова. При подготовке к полету оперение и крылья выставляют в рабочее положение под взлетным углом атаки. Воздушный движитель используют при полете. Для маневрирования, взлета и посадки применяют горизонтальные и вертикальные рули. При полете управляют направлением вектора тяги воздушного движителя посредством изменения его ориентирования, а также изменением размаха крыльев и длины любого крыла транспортного средства. Транспортное средство характеризуется тем, что убираемые крылья и стабилизатор выполнены мультиконсольными телескопическими и собраны в соответствующую обойму с возможностью выдвижения их секций в поперечном направлении. Обойма установлена на корпусе-кузове и шарнирно соединена с приводами с возможностью изменения угла атаки крыла. Воздушный движитель и хвостовое оперение установлены на консольном подвесе переменной длины с возможностью изменения угла между осью вращения воздушного движителя и продольной осью транспортного средства. Технический результат реализации группы изобретений заключается в улучшении управляемости, а также продольной и поперечной устойчивости транспортного средства в полетном режиме движения. 2 с. и 19 з.п.ф-лы, 17 ил.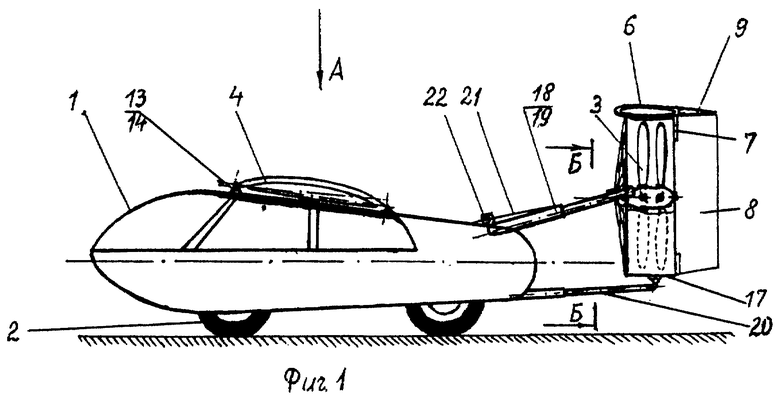
| УНИВЕРСАЛЬНЫЙ ПОЛИПЛАН | 1992 |
|
RU2025295C1 |
| DE 3900096 A1 20.07.1969 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1991 |
|
RU2016781C1 |
| Устройство для погружения в водонасыщенный грунт элемента строительной конструкции | 1989 |
|
SU1756463A1 |

