Изобретение относится к области авиационной техники и может быть использовано в конструкции электровинтопланов-трансформеров, выполненных по концепции разнесенной тяги разноуровневых винтов в схеме Х4+2, но и тандемной схеме с низко расположенными крыльями обратной и прямой стреловидности и схеме парасоль соответственно с четырьмя несущими и двумя поворотными винтами, размещенными на концах каждого крыла и обеспечивающими выполнение вертикального и короткого взлета/посадки (ВВП и КВП) или после взлета и соответствующего поворота верхних винтов - горизонтальный крейсерский полет, или после посадки и соответствующего складывания крыльев с винтами - передвижения по земле.
Известен вертикально взлетающий беспилотный летательный аппарат (БЛА) компании "Новые технологии" (РФ) модели "Эра-100" с тандемным расположением двух крыльев, имеющих электромоторы с двухлопастными винтами, установленными в поворотных мотогондолах на концах консолей обратной и прямой стреловидности, при повороте которых он преобразовывается в вертолет четырех-винтовой несущей схемы, содержит в фюзеляже из углепластика систему управления и аккумуляторные батареи, и полозковое шасси рессорного типа.
Признаки, совпадающие: наличие тандемного расположения двух крыльев, имеющих электромоторы мощностью по 2,7 кВт с винтами, установленными в мотогондолах на законцовках каждого крыла. Система управляет передней и задней парой поворотных электромоторов соответственно с тянущими винтами на низко расположенном крыле обратной стреловидности и с толкающими винтами на высоко расположенном крыле прямой стреловидности. БЛА "Эра-100" с взлетным весом 24 кг, являясь разведывательным вертикально взлетающим беспилотным полностью электрическим аппаратом, сочетающим в себе преимущества и вертолета, и самолета, может подниматься на высоту порядка 2000 м, наличие тандемных крыльев позволяет при крейсерском полете в самолетной конфигурации находится без подзарядки батарей в воздухе до 1 часа и действовать в радиусе до 60 км от оператора для телевизионного или инфракрасного наблюдения местности в реальном масштабе времени.
Причины, препятствующие поставленной задаче: первая - это то, что четырехвинтовой БЛА "Эра-100" имеет ряд недостатков, препятствующих дальнейшему повышению полезной нагрузки (ПН), как-то: первый - это то, что данный БЛА, имеющий на концах консолей тандемных крыльев с размахом 1 м четыре поворотных электромотора с винтами диаметром 0,5 м, имеет плохую управляемость по курсу на самолетных режимах полета, сложную схему управления электромоторами при независимом их повороте и вращении равновеликих двух толкающих и двух тянущих винтов на переходных и вертолетных режимах полета. Второй - это то, что при висении поток от двух передних тянущих винтов, обдувая соответственно консоли первого крыла от их законцовок, создают из-за отсутствия внешних закрылок переднего крыла значительную потерю каждого винта (≈20%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги передних винтов и создавать задними двумя толкающими винтами ситуацию неуправляемого пикирования, что снижает стабильность управления и безопасность. Третий - это то, что равновеликие винты с четырьмя электромоторами одинаковой мощности предопределяют равноудаленное размещение пары передних и пары задних винтов от центра масс, что, уменьшая длину фюзеляжа до 1,3 м, приводит из-за отсутствия киля к ухудшению путевой устойчивости на переходных и крейсерских режимах полета.
Известен (https://www.terrafugia.com/) вертикально взлетающий аэромобиль-трансформер проекта TF-X фирмы "Terrafugia" (США), имеющий складное высокорасположенное крыло, на концах которого размещены поворотные гондолы с электромоторами и винтами, содержит гибридную силовую электроустановку с поршневым двигателем (ПД), приводящим во вращение толкающий импеллер или генератор для подзарядки батарей, систему управления и аккумуляторную батарею, четырехопорное колесное шасси, неубирающееся, имеющее задние приводные мотор-колеса.
Признаки, совпадающие: наличие для выполнения ВВП поворотных гондол с электромоторами и винтами, смонтированными на концах складного высокорасположенного крыла типа чайка и горизонтального полета в конфигурации самолета со сложенными вдоль гондол лопастями тянущих винтов, обеспечиваемого толкающим импеллером, приводимым ПД мощностью 300 л.с, но и четырехопорным колесным шасси, неубирающимся, имеющим задние приводные мотор-колеса, когда на земле крылья и лопастные гондолы сложатся и TF-X превратится в электромобиль, сертифицированный для использования на дорогах общего пользования. Системой ВВП управляют 32-а электромотора с общей мощностью 447×2 кВт, сгруппированных в двух гондолах с тянущими винтами. Вертикал взлетающий аэромобиль-трансформер может подниматься на высоту в диапазоне 500…3500 м, наличие крыла позволяет при крейсерском полете в самолетной конфигурации находится без подзарядки батарей в воздухе до 2,5 часов и достичь скорости 320 км/ч и дальности 800 км.
Причины, препятствующие поставленной задаче: первая - это то, что расположение поворотных гондол на концах складного крыла типа чайка и винтами предопределяет конструктивно сложное прямое крыло, оснащенное двумя сложными системами поворота и складывания лопастей поворотных винтов, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что при висении поток от двух поворотных тянущих винтов, обдувая консоли складного крыла с удлинением λ=3,0, создают из-за отсутствия внешних его закрылок значительную потерю каждого винта (≈20%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги передних винтов и создавать задними двумя винтами ситуацию неуправляемого падения, что снижает стабильность управления и, безопасность. Третья - это то, что для старта вокруг TF-X понадобится чистая зона диаметром в 9,288 м, так как раскладывающиеся крылья и винты с создаваемыми ими потоками воздуха исключают обычный взлет с шоссе из-за не возможности соблюдения норм безопасности. Кроме того, отсутствия вертикального киля ухудшает также путевую устойчивость на переходных и крейсерских режимах полета в самолетной конфигурации.
Наиболее близким (http://www.ehang.com/ehang184) к предлагаемому изобретению является беспилотный-электровертолет модели Ehang 184 фирмы "Ehang" (КНР), представляющий собой аэротакси с фюзеляжем, имеющим передние и задние V-образные в плане держатели круглого сечения, на концах которых размещены попарно электродвигатели в единых мотогондолах с верхними и нижними двухлопастными пропеллерами, имеет в фюзеляже из углепластика кабину, систему управления и аккумуляторные батареи, и четырехстоечное неубирающееся колесное шасси.
Признаки, совпадающие: имеется восемь электродвигателей, суммарной мощностью 106 кВт (144 л.с.), которые сгруппированы попарно и размещены вместе с их электродвигателями на концах складываемых на стоянке вверх держателях и приводят в действие восемь пропеллеров d=1,5 м в единых мотогондолах с верхним и нижним их расположением, имеющих отклоненные оси их вращения во внутрь вдоль оси соответствующего держателя, имеющего круглое сечение из-за увеличенной консольной нагрузки двух электродвигателей с пропеллерами. Половина из них вращается по часовой стрелке, половина - против, поэтому рулевой винт ему не нужен. Изменение высоты полета, поворот и горизонтальное движение обеспечивается исключительно за счет уменьшения или увеличения оборотов соответствующих электродвигателей. Аккумуляторная батарея общим весом 100 кг и емкостью 14,4 кВт*ч, включает восемь блоков и размещена под днищем кабины. Количества энергии аккумуляторной батареи достаточно для полета Ehang 184 с одним пассажиром в течение 23 минут. Полномасштабный миниэлектровертолет Ehang 184, весящий пустой с аккумуляторными батареями 200 кг, способен поднимать в воздух груз весом в 120 кг и, перемещаясь со скоростью 100 км/ч на высоте до 3500 м, достичь дальности до 38 км.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение в единых мотогондолах с электродвигателями, которые сгруппированы попарно и размещены с пропеллерами предопределяет конструктивно жесткие держатели круглого сечения, не имеющие несущей способности, что повышает аэродинамическое сопротивление и утяжеляет конструкцию. Вторая - это то, что диаметры двух верхнего и нижнего пропеллеров в каждом из V-образных в плане держателе ограничены их размахом и имеют не разнесенное один над другим расположение, что уменьшает на 78-80% вертикальную тяговооруженность, а отсутствие возможности создания маршевой горизонтальной тяги исключает возможность выполнения КВП. Третья - это то, что изменение высоты полета, поворот и, особенно, горизонтальный полет обеспечивается исключительно за счет уменьшения или увеличения оборотов соответствующих электродвигателей, что предопределяет повышенное энергопотребление электродвигателей. Четвертая - это то, что полозковое шасси имеет две переднюю и заднюю пары колес только для установочного маневрирования на поверхности взлетной площадки, что исключает возможность конструктивного исполнения колесного шасси с задними мотор-колесами. Кроме того, отсутствие хвостового оперения значительно усложняет возможность продольного и поперечного управления, особенно, на переходных режимах полета, когда у такого аппарата отсутствие крыла и его подъемной силы приводит к не уравновешиванию несущей системы с восемью пропеллерами, особенно, при горизонтальном полете, что также увеличивает энергопотребление всех электродвигателей и ограничивает длительность полета на крейсерских режимах до 23 минут. Недостатком является также отсутствие хвостового оперения, отсюда плохая и путевая устойчивость и, особенно, при отказе одного из электродвигателей при асимметрии тяги. Все это ограничивает возможность увеличения скорости, времени и дальности полета, повышения взлетного веса и весовой отдачи.
Предлагаемым изобретением решается задача в указанном выше известном беспилотном электровертолет Ehang 184 увеличения полезной нагрузки и весовой отдачи, повышения скорости, дальности полета и транспортной эффективности, упрощения курсовой, продольной и поперечной управляемости на переходных режимах, вертикальном взлете, посадке и висении и улучшения поперечной и курсовой устойчивости, но и управляемости по крену, тангажу и курсу при крейсерском полете.
Отличительными признаками предлагаемого изобретения от указанного выше известного беспилотного электровертолета Ehang 184, наиболее близкого к нему, являются наличие того, что он выполнен по концепции разнесенной тяги разноуровневых винтов (РТРВ) в схеме РТРВ-Х4+2, включающей как переднюю и заднюю пару несущих винтов, размещенных в тандемной схеме на концах низко расположенных трапециевидных крыльев большого удлинения соответственно обратной и прямой стреловидности, так и левый и правый поворотные винты, установленные на концах консолей прямого крыла типа парасоль большого удлинения и обеспечивающие выполнение технологии вертикального и короткого взлета/посадки (ВВП и КВП) или после взлета горизонтальный крейсерский полет при соответствующем повороте верхних винтов и создающие возможность преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, включающей два передних, два задних и два средних несущих винта соответственно в нижней и верхней их группе, как в полетную конфигурацию винтокрыла или крылатого автожира, имеющего подъемную систему в тандемной схеме и схеме парасоль совместно с четырехвинтовой несущей системой при двухвинтовой движительной системе в верхней группе винтов и при вращающихся нижних несущих винтах соответственно на режимах с нагруженными несущими винтами и/или близком к их самовращению при создании ими пропульсивной тяги совместно с маршевой тягой верхних винтов, так и обратно, при этом в несущей системе при выполнении ВВП и зависания все несущие винты, работающие по тянущей схеме и имеющие как плоскости вращения их лопастей, размещенные над консолями соответствующих крыльев, так и поворотные винты из них при соответствующем их отклонении от вертикали создают маршевую горизонтальную тягу при вынесенных плоскостях вращения их лопастей за переднюю кромку верхнего крыла типа парасоль, но и полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами в каждой их группе таким образом, что в задней группе левый и правый нижние винты вращаются при виде сверху соответственно против и по часовой стрелке перед соответствующим бортом фюзеляжа и, тем самым, при выполнении режима зависания создают гармоничное сочетание поперечного и путевого управления и уменьшение вредного влияния поворотных верхних на нижние несущие винты, а также возможность их выполнения как с жестким креплением лопастей и без изменения циклического их шага, так и с возможностью изменения частоты их вращения, причем в схеме парасоль к задней части его пилона смонтирована конусная высоко расположенная хвостовая балка с оперением обратной V-образности, имеющим рулевые поверхности, а на профилированном пилоне, выполненным в виде стреловидного киля, вынесен назад от центра масс совместно с каплевидным обтекателем прямого крыла, имеющего обратную стреловидность по передней кромке с углом χ=-6,5° и положительный угол ψ=+5° поперечного V, но и возможность поворота консолей крыла в плоскости хорды крыла назад по полету, уменьшая стояночную площадь при вертикальном расположении осей вращения верхних винтов и фиксированном размещении их лопастей вдоль консолей крыла типа парасоль, размещенных параллельно оси симметрии, при этом в каплевидном обтекателе, имеющем в верхней автоматически раскрываемой части контейнер спасательной системы с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры пилона, которая смонтирована совместно с центропланом верхнего крыла типа парасоль, имеющего элероны и образующего с тандемными крыльями обратной и прямой стреловидности схему биплан большой высоты и с Х-образной в плане конфигурацией при разнонаправленной стреловидности консолей низко расположенных крыльев, консоли которых в корневых их частях имеют узлы поворота, горизонтальные оси которых размещены под углом (βго) к оси симметрии (равным βго=90°-χнк, град., где: χнк - угол обратной и прямой стреловидности соответственно нижних тандемных передних и задних крыльев) и обеспечивают возможность их отклонения на стоянке вверх с вертикальным расположением консолей нижних крыльев вдоль их лонжеронов при фиксированном размещении лопастей нижних винтов параллельно горизонтальной плоскости при минимально возможной высоте в стояночной его конфигурации, причем при зависании верхние винты снабжены возможностью их синфазного и дифференциального отклонения от вертикали вперед по направлению полета или назад соответственно для соответствующего как поступательного горизонтального полета, так и противодействия силе встречного или попутного ветра, но и выполнения управления по курсу, электрическая силовая установка (ЭСУ), имеющая четыре нижних электромотора, выполненных для удвоения времени зависания при ВВП в виде обратимых электромоторов-генераторов (ОЭМГ) с несущими винтами, авторотирующими от набегающего воздушного потока в полетной конфигурации крылатого автожира, вращают соответствующие ОЭМГ, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают блоки быстро заряжаемых аккумуляторных батарей, расположенных под днищем фюзеляжа в соответствующем отсеке между передней и задней парой упомянутого колесного шасси.
Кроме того, упомянутая ЭСУ выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей все электромоторы, ОЭМГ, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы, ОЭМГ и роторно-поршневой двигатель (РПД), переключающим генерирующую мощность и порядок подзарядки аккумуляторов и снабженной возможностью реализации двух способов работы с внутренним источником энергии - РПД, установленным в задней части фюзеляжа в двигательном отсеке и имеющим трансмиссию для передачи мощности на генератор для выработки генерирующей электрической мощности или при его полете на крейсерских режимах горизонтального полета и питания всех электромоторов, обеспечивающих необходимые режимы полета, или при его передвижении на земле с обеспечением необходимых режимов поездки при питании задних мотор-колес упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения со сложенными крыльями и фиксированными их винтами в конфигурации электрического автомобиля, сертифицированного для использования на дорогах общего пользования.
Кроме того, упомянутый РПД имеет трансмиссию для передачи мощности либо на генератор для выработки генерирующей электрической мощности при его полете на крейсерских режимах горизонтального полета и питания всех электромоторов, обеспечивающих необходимые режимы полета, либо через коробку передач на привод задних колес упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения со сложенными крыльями и фиксированными их винтами в конфигурации гибридного автомобиля, сертифицированного для использования на дорогах общего пользования, при этом упомянутый РПД сочетается с семидиапазонной трансмиссией: пять передач предназначены для езды (четыре передних и одна задняя), шестая передает крутящий момент только на генератор в полете, а седьмая ступень одновременно вращает и генератор, и приводит задние колеса для быстрого взлета при выполнении КВП.
Кроме того, все несущие винты, работающие по толкающей схеме и имеющие плоскости вращения их лопастей размещенные под консолями соответствующих крыльев, так, что поворотные винты из них при соответствующем их повороте от вертикали создают маршевую горизонтальную тягу при вынесенных плоскостях вращения их лопастей за заднюю кромку верхнего упомянутого прямого крыла типа парасоль, имеющего прямую стреловидность по передней кромке с углом χ=+10°, а профилированный пилон, вынесенный вперед от центра масс, выполнен в виде киля обратной стреловидности, причем в стояночной конфигурации при упомянутом отклонении вверх консолей нижнего крыла его толкающие винты снабжены вторым способом фиксированного размещения их лопастей - вдоль соответствующих консолей нижних крыльев при минимально возможной ширине.
Кроме того, при выполнении ВВП для повышения безопасности на боковых поверхностях нижних мотогондол, смонтированных на упомянутых низко расположенных крыльях, имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом автономные системы управления, включающие как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему экстренной автоматической посадки, которая включится в том случае, если пилот не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке.
Благодаря наличию этих признаков, позволяющих выполнить электровинтоплан-трансформер (ЭВПТ) по концепций разнесенной тяги разноуровневых винтов в схеме РТРВ-Х4+2, включающей как переднюю и заднюю пару несущих винтов, размещенных в тандемной схеме на концах низко расположенных трапециевидных крыльев большого удлинения соответственно обратной и прямой стреловидности, так и левый и правый поворотные винты, установленные на концах консолей прямого крыла типа парасоль большого удлинения и обеспечивающие выполнение технологии ВВП и КВП или после взлета горизонтальный крейсерский полет при соответствующем повороте верхних винтов и создающие возможность преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, включающей два передних, два задних и два средних несущих винта соответственно в нижней и верхней их группе, как в полетную конфигурацию винтокрыла или крылатого автожира, имеющего подъемную систему в тандемной схеме и схеме парасоль совместно с четырехвинтовой несущей системой при двухвинтовой движительной системе в верхней группе винтов и при вращающихся нижних несущих винтах соответственно на режимах с нагруженными несущими винтами и/или близком к их самовращению при создании ими пропульсивной тяги совместно с маршевой тягой верхних винтов, так и обратно. В несущей системе при выполнении ВВП и зависания все несущие винты, работающие по тянущей схеме и имеющие как плоскости вращения их лопастей, размещенные над консолями соответствующих крыльев, так и поворотные винты из них при соответствующем их отклонении от вертикали создают маршевую горизонтальную тягу при вынесенных плоскостях вращения их лопастей за переднюю кромку верхнего крыла типа парасоль, но и полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами в каждой их группе таким образом, что в задней группе левый и правый нижние винты вращаются при виде сверху соответственно против и по часовой стрелке перед соответствующим бортом фюзеляжа и, тем самым, при выполнении режима зависания создают гармоничное сочетание поперечного и путевого управления и уменьшение вредного влияния поворотных верхних на нижние несущие винты, а также возможность их выполнения как с жестким креплением лопастей и без изменения циклического их шага, так и с возможностью изменения частоты их вращения, причем в схеме парасоль к задней части его пилона смонтирована конусная высоко расположенная хвостовая балка с оперением обратной V-образности, имеющим рулевые поверхности, а на профилированном пилоне, выполненным в виде стреловидного киля, вынесен назад от центра масс совместно обтекателем прямого крыла, имеющего обратную стреловидность по передней кромке с углом χ=-6,5° и положительный угол ψ=+5° поперечного V, но и возможность поворота консолей крыла в плоскости хорды крыла назад по полету, уменьшая стояночную площадь при вертикальном расположении осей вращения верхних винтов и фиксированном размещении их лопастей вдоль консолей крыла типа парасоль, размещенных параллельно оси симметрии. В каплевидном обтекателе, имеющем в верхней автоматически раскрываемой части контейнер спасательной системы с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры пилона, которая смонтирована совместно с центропланом верхнего крыла типа парасоль, имеющего элероны и образующего с тандемными крыльями обратной и прямой стреловидности схему биплан большой высоты и с Х-образной в плане конфигурацией при разнонаправленной стреловидности консолей низко расположенных крыльев, консоли которых в корневых их частях имеют узлы поворота, горизонтальные оси которых размещены под углом (βго) к оси симметрии (равным βго=90° -χнк, град., где: χнк - угол обратной и прямой стреловидности соответственно нижних тандемных передних и задних крыльев) и обеспечивают возможность их отклонения на стоянке вверх с вертикальным расположением консолей нижних крыльев вдоль их лонжеронов при фиксированном размещении лопастей нижних винтов параллельно горизонтальной плоскости при минимально возможной высоте в стояночной его конфигурации, причем при зависании верхние винты снабжены возможностью их синфазного и дифференциального отклонения от вертикали вперед по направлению полета или назад соответственно для соответствующего как поступательного горизонтального полета, так и противодействия силе встречного или попутного ветра, но и выполнения управления по курсу, электрическая силовая установка (ЭСУ), имеющая четыре нижних электромотора, выполненных для удвоения времени зависания при ВВП в виде ОЭМГ с несущими винтами, авторотирующими от набегающего воздушного потока в полетной конфигурации крылатого автожира, вращают соответствующие ОЭМГ, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают блоки быстро заряжаемых аккумуляторных батарей, расположенных под днищем фюзеляжа в соответствующем отсеке между передней и задней парой упомянутого колесного шасси. При авторотации или на режимах близком к самовращению нижних несущих винтов срыв потока на их лопастях отодвигается на более высокие скорости полета, что позволит из-за аэродинамической симметрии относительно центра масс исключить потерю подъемной силы из-за срыва потока с отступающих их лопастей на режиме горизонтального полета и, как следствие, достичь скорости полета 220 или 240 км/ч соответственно. Все это позволит повысить скороподъемность, скорость и дальность полета многоцелевого ЭВПТ исполнения РТРВ-Х4+2, являющегося наиболее эффективной схемой перспективного винтокрылого электроаппарата городского базирования при выполнении операций с вертикальным подъемом грузов, так как она с разноуровневыми несущими винтами, имеющими лопасти с оживальными законцовками, обеспечивает улучшение характеристик на режиме висения и уменьшение расхода мощности, массы конструкции, уровня шума, вибраций и затрат на техобслуживание.
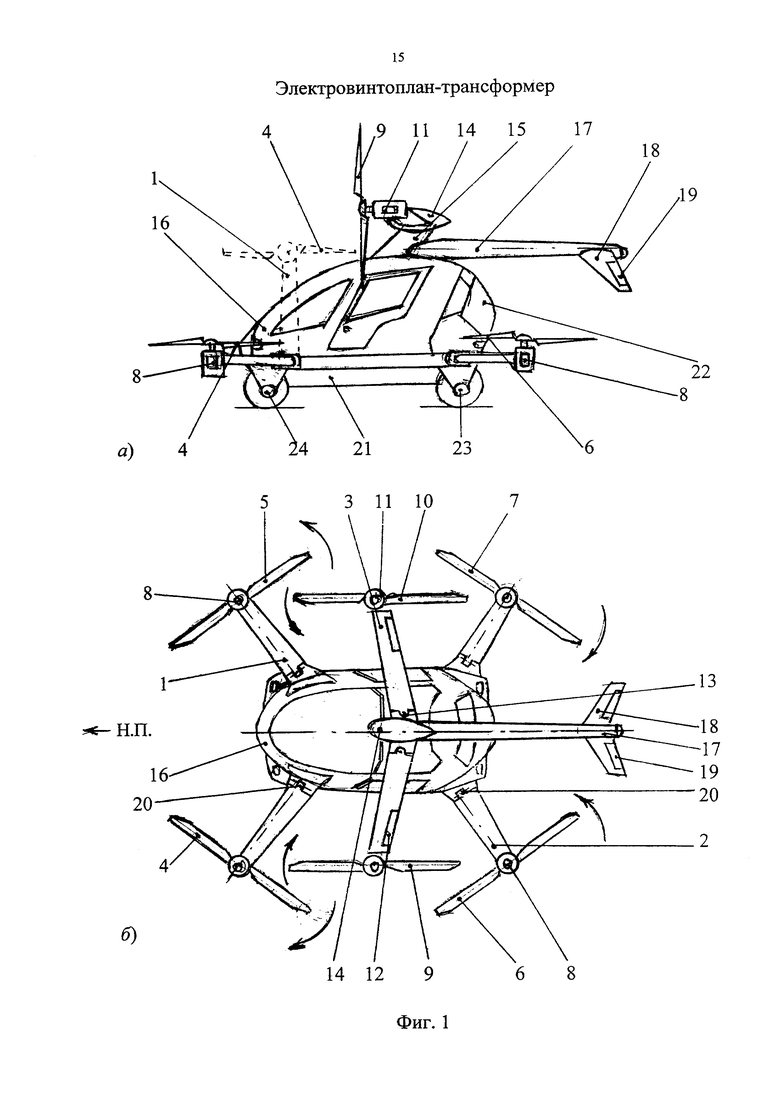
Предлагаемое изобретение ЭВПТ, имеющего на концах верхнего крыла типа парасоль и тандемных нижних крыльев с разнонаправленной Х-образной стреловидностью соответственно два поворотных электромотора и четыре ОЭМГ с тянущими винтами, представленное на фиг. 1 с вариантами его использования как электромобиля.
На фиг. 1 изображен ЭВПТ исполнения РТРВ-Х4+2 на общих видах сбоку и сверху с двухлопастными винтами соответственно а) и б) в схеме «тандем-биплан» с передними, задними и средними разноуровневыми крыльями при его использовании:
а) в полетной конфигурации крылатого автожира или винтокрыла с несущей и движительной системами соответственно с крыльями схемы «тандем» совместно с несущими винтами, авторотирующими или вращающимися на режиме близком к их самовращению, и крылом типа парасоль с двумя поворотными тянущими винтами, создающими маршевую тягу и управляющие моменты на режимах перехода;
б) в полетной конфигурации мини электровертолета с шестивинтовой системой РТРВ-Х4+2, включающей несущие тянущие нижние четыре и верхние два винта.
Многоцелевой ЭВПТ исполнения РТРВ-Х4+2, выполненный по схеме «тандем-биплан» с низко расположенными крыльями обратной 1 и прямой 2 стреловидности, но и высоко расположенным крылом 3 обратной стреловидности (КОС) типа парасоль соответственно с двумя передними левым 4 и правым 5 и двумя задними левым 6 и правым 7 несущими винтами вращательно связанные с соответствующим ОЭМГ 8, но и двумя левым 9 и правым 10 поворотными винтами вращательно связанные с соответствующим электромоторами 11, размещенными на концах КОС 3. Прямое КОС 3, имеющее элероны 12 и узлы поворота 13, отклоняющие в плоскости его хорды назад по полету и располагающие его консоли параллельно оси симметрии, установлены по бокам каплевидного обтекателя 14, смонтированного на пилоне 15, выполненного в виде стреловидного киля. К задней части пилона 15 и верхней части фюзеляжа 16 смонтирована конусная хвостовая балка 17, снабженная оперением 18 обратной V-образности, имеющим рулевые поверхности 19. Трапециевидные нижние крылья переднее 1 и заднее 2 имеют в корневых их частях узлы поворота 20, горизонтальные оси которых размещены под углом к оси симметрии и обеспечивают возможность их вертикального отклонения на стоянке вверх к соответствующим бортам фюзеляжа 16 (см. фиг. 1a показано пунктиром). В каплевидном обтекателе 14, имеющем в верхней автоматически раскрываемой части контейнер спасательной системы с вытяжным и основным парашютами (на фиг. 1 не показано).
Многодвигательная ЭСУ выполнена по параллельно-последовательной гибридной технологии силового привода с несущей системой, включающей левую и правую поворотные мотогондолы с электромоторами 11, вращающими левый 9 и правый 10 винты средней группы, но и носовые и кормовые мотогондолы с ОЭМГ 8, вращающими соответственно левый 4 с правым 5 винтами передней группы и левый 6 с правым 7 винтами задней группы, и обеспечивающей выполнение технологии ВВП и зависания, но и горизонтальный полет на крейсерских режимах. При этом в полетной конфигурации крылатого автожира с несущими передними 4-5 и задними 6-7 винтами, авторотирующими от набегающего воздушного потока, вращают соответствующие ОЭМГ 8, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают блоки быстро заряжаемых аккумуляторных батарей, расположенных под днищем фюзеляжа 16 в соответствующем отсеке 21 между колес шасси. В задней части фюзеляжа 16 имеется двигательный отсек 22, в котором размещен РПД с трансмиссией для передачи мощности на генератор для выработки генерирующей электрической мощности или при его полете на крейсерских режимах горизонтального полета и питания всех электромоторов, обеспечивающих необходимые режимы полета, или при его передвижении на земле с и обеспечением необходимых режимов поездки при питании задних мотор-колес 23 четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес 24 для наземного его передвижения со сложенными крыльями и фиксированными их винтами в конфигурации электромобиля с габаритными огнями, поворотниками и фарами (на фиг. 1 не показано). Поворот мотогондол 11 с двухлопастными винтами 9 и 10, преобразующих его полетную конфигурацию с вертолета шестивинтовой несущей схемы в четырехвинтовой винтокрыл или крылатый автожир, схемы «тандем-биплан», осуществляется с помощью электромеханических приводов, а складывание консолей КОС 3 к хвостовой балке 17 и отклонение консолей крыльев 1 и 2 вверх к бортам фюзеляжа 16, управление элеронами 12 и рулями 19 осуществляется также электрически. Для размещения целевой нагрузки в фюзеляже 16 предусмотрена закрытая двухместная кабина с расположением пассажиров бок о бок. Пассажирская кабина выполнена из композитных материалов и углеродного волокна, каркас и несущие элементы фюзеляжа - из сплавов на основе алюминия. В комплектацию также входит кондиционер воздуха, система 4G Network, камера и небольшой багажный отсек. При выполнении ВВП для повышения безопасности на боковых поверхностях нижних мотогондол 8 имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами. Автономные системы автопилота ЭВПТ осуществят самостоятельный взлет после выбора и подтверждения маршрута, идентифицируют появившиеся на пути следования препятствия и дадут команду на их облет, а затем обеспечат мягкую посадку в заданной точке. Кроме того, ЭВПТ имеет спасательные парашюты и систему экстренной автоматической посадки, которая включится в том случае, если пилот не будет реагировать на запросы компьютера. После приземления консоли крыльев складываются с фиксированными лопастями винтов и ЭВПТ превратится в электромобиль для передвижения по шоссе.
Управление многоцелевым ЭВПТ обеспечивается наподобие управлением мультикоптером, а именно изменение высоты полета, поворот и, особенно, управление по крену и тангажу обеспечивается исключительно за счет уменьшения или увеличения оборотов соответствующих электромоторов с винтами передней 4-5, средней 9-10 и задней 6-7 групп. При крейсерском полете подъемная сила создается крыльями 1-2 и КОС 3, горизонтальная тяга - поворотными винтами 9-10, на режиме висения только винтами передней 4-5, средней 9-10 и задней 6-7 групп, на режиме перехода - крыльями 1-2 и КОС 3 с винтами 4-5, 9-10 и 6-7. При переходе с винтокрылого режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением рулей 19 оперения 18, создающих, работая в зоне обдува средних винтов 9-10, парирующую силу. После установки поворотных винтов средних 9-10 в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. В шестивинтовой несущей системе винты передней 4-5, средней 9-10 и задней 6-7 групп, имея взаимно противоположное их вращение в каждой группе винтов (см. фиг. 1б), образуют под ЭВПТ эффект воздушной подушки, повышающей их эффективность. Поворотные средние 9-10 винты отклоняются от горизонтального положения в вертикальное на угол 90° и 65° соответственно при ВВП и КВП на вертолетных и винтокрылых режимах его полета. Для соответствующей посадки ЭВПТ на поверхность земли используются задние приводные колеса 23 и передние рулевые 24, неубирающегося четырехопорного шасси.
При висении на вертолетных режимах полета продольное управление ЭВПТ осуществляется изменением уменьшения или увеличения оборотов винтов передней 4-5 и задней 6-7 групп, путевое управление - изменением крутящих моментов каждой группы винтов, имеющих одинаковое направление вращения диагонально расположенных винтов, например, 4-7 и 5-6 нижней группы. Поперечное управление обеспечивается изменением числа оборотов левого 9 и правого 10 средних винтов, осуществляющих поперечную балансировку: После вертикального взлета и набора высоты для перехода на режим полета крылатого автожира поворотные винты 9 и 10 синхронно устанавливаются в горизонтальное положение (см. фиг. 1а) и производится крейсерский полет, при котором путевое управление обеспечивается рулями 19 оперения 18. Продольное и поперечное управление может осуществляться синфазным и дифференциальным отклонением рулей 19 и элеронов 12 соответственно. На режимах полета ЭВПТ в конфигурации крылатого автожира при создании горизонтальной тяги его винты средней 9-10 группы имеют взаимно противоположное их вращения и, тем самым, соответственно устраняют гироскопический эффект и обеспечивают более плавное обтекание КОС 3, но и весьма повышающее эффективность передней 4-5 и задней 6-7 группы винтов. При его вертолетной полетной конфигурации шестивинтовой несущей схемы реактивные моменты от двухлопастных винтов передней 4-5, средней 9-10 и задней 6-7 групп, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения в каждой из групп.
Таким образом, многоцелевой ЭВПТ, выполненный по концепции РТРВ-Х4+2, включающей на концах низко расположенных тандемных крыльев и высоко расположенном крыле типа парасоль соответственно четыре несущих винта в подъемно-несущей и два поворотных винта в подъемно-маршевой системах, обеспечивающих возможность преобразования его полетной конфигурации, представляет собой преобразуемый мини электровинтоплан-трансформер, имеющий возможность автоматического складывания на земле низко- и высоко расположенных крыльев совместно с установленными на них соответственно несущими и поворотными винтами. После чего ЭВПТ превратится в обычный электромобиль для передвижения по автодорогам.
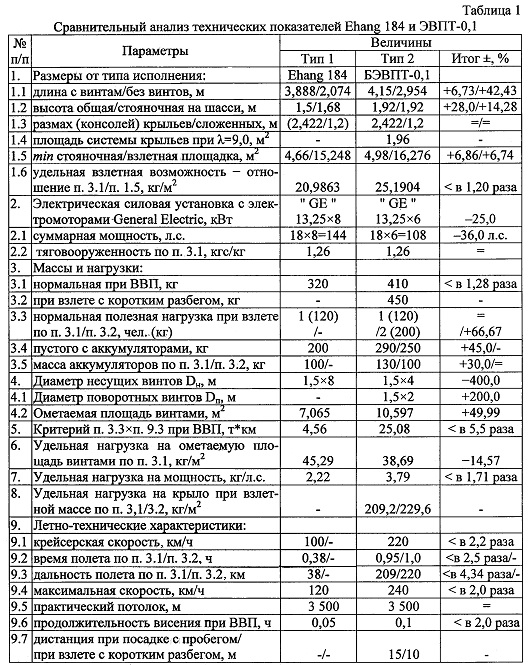
Выбор такой аэродинамической схемы ЭВПТ обусловлен простотой и возможностью преобразования его "полетной конфигурации с вертолета шестивинтовой схемы с несущими винтами в полетную конфигурацию четырехвинтового винтокрыла или крылатого автожира с двухвинтовой движительно-рулевой системой, но и обратно. При этом нижние несущие винты в конфигурации вертолета и винтокрыла предназначены для создания подъемной силы, поступательное же движение в горизонтальной плоскости увеличивается верхними поворотными винтами. На вертолетных режимах полета такая несущая схема РТРВ-Х4+2, имея в многодвигательной ЭСУ суммарную мощность шести электромоторов меньше на 36 л.с., чем у прототипа модели Ehang 184, а наличие системы крыльев «тандем-биплан» обеспечивает дополнительную подъемную силу на крейсерских режимах в полетной конфигурации автожира, что позволяет увеличить почти на 28,12% взлетный вес, скорость и время полета соответственно в 2,2 и 2,5 раза, а также увеличить вес аккумуляторных батарей в 1,3 раза. Последнее позволит для городского ЭВПТ-0,1 весьма улучшить максимальное время продолжительности висения при выполнении ВВП, которое в 2,0 раза эффективнее, чем у мини электровертолета Ehang 184, а также увеличить в 5,5 раза критерий транспортной эффективности, определяемый из произведения полезной нагрузки на дальность полета, т.е. показателей: п. 3.3× п. 9.3 при ВВП, т*км (см. п. 5 табл. 1).
Очевидно, освоение ЭВПТ-0,1 с улучшенными тактико-техническими показателями для городского авиатранспорта в современных условиях - задача многоплановая и не является технически неразрешимой. Наиболее актуальным в современных условиях для этих целей является освоение полностью электрического ЭВПТ исполнения РТРВ-Х4+2. Поэтому дальнейшие исследования в процессе развития электрической винтокрылой авиации для городских нужд, широко использующей сейчас вертолеты одновинтовой схемы, самой жизнью будет продиктована первоочередная задача освоения ЭВПТ-0,1, которая достаточно просто и технически реализуема.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
Изобретение относится к области преобразуемых транспортных средств. Авиатрансформер, преобразуемый в автомобиль, выполнен по концепции разнесенной тяги разноуровневых винтов (РТРВ) в схеме РТРВ-Х4+2, включающей как переднюю и заднюю пару несущих винтов, размещенных в тандемной схеме на концах низкорасположенных трапециевидных крыльев большого удлинения соответственно обратной и прямой стреловидности, так и левый и правый поворотные винты, установленные на концах консолей прямого крыла типа парасоль большого удлинения, обеспечивающие выполнение вертикального и короткого взлета/посадки (ВВП и КВП) или после взлета горизонтальный крейсерский полет при соответствующем повороте верхних винтов. Авиатрансформер имеет возможность преобразования полетной конфигурации с вертолета шестивинтовой несущей схемы, в полетную конфигурацию винтокрыла или крылатого автожира. При выполнении ВВП и зависания все несущие винты работают по тянущей схеме и имеют плоскости вращения их лопастей над консолями соответствующих крыльев. Плоскости вращения поворотных винтов при соответствующем повороте вынесены за переднюю кромку верхнего крыла типа парасоль. Обеспечивается увеличение полезной нагрузки, повышение скорости, дальности полета, улучшение курсовой устойчивости и управляемости по крену и тангажу при крейсерском полете. 3 з.п. ф-лы, 1 табл., 1 ил.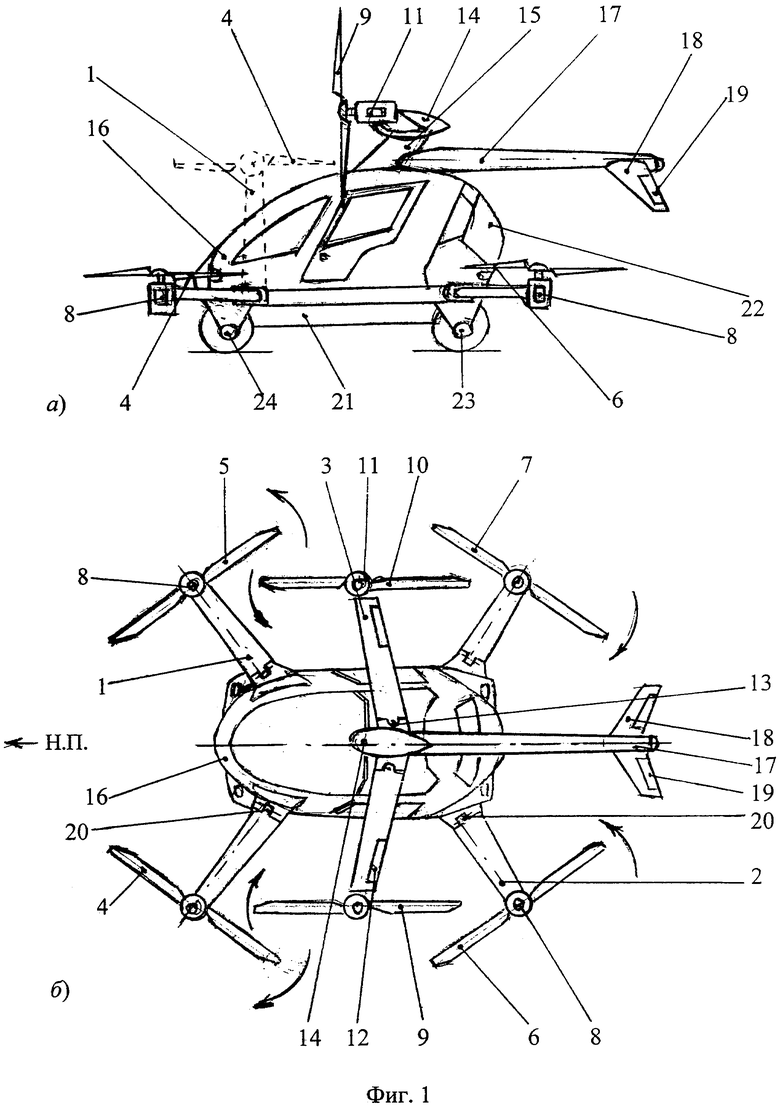
1. Авиатрансформер, преобразуемый в автомобиль, представляющий собой аэротакси, имеет электродвигатели с винтами для создания подъемной и тяговой силы, установленные с двух сторон фюзеляжа, выполненного из углепластика, систему управления, аккумуляторные батареи и четырехстоечное неубирающееся колесное шасси, отличающийся тем, что он выполнен по концепции разнесенной тяги разноуровневых винтов (РТРВ) в схеме РТРВ-Х4+2, включающей как переднюю и заднюю пару несущих винтов, размещенных в тандемной схеме на концах низко расположенных трапециевидных крыльев большого удлинения соответственно обратной и прямой стреловидности, так и левый и правый поворотные винты, смонтированные на концах консолей прямого крыла типа парасоль большого удлинения и обеспечивающие выполнение технологии вертикального и короткого взлета/посадки (ВВП и КВП) или после взлета горизонтальный крейсерский полет при соответствующем повороте верхних винтов и создающие возможность преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, включающей два передних, два задних и два средних несущих винта соответственно в нижней и верхней их группе, как в полетную конфигурацию винтокрыла или крылатого автожира, имеющего подъемную систему в тандемной схеме и схеме парасоль совместно с четырехвинтовой несущей системой при двухвинтовой движительной системе в верхней группе винтов и при вращающихся нижних несущих винтах соответственно на режимах с нагруженными несущими винтами и/или близком к их самовращению при создании ими пропульсивной тяги совместно с маршевой тягой верхних винтов, так и обратно, при этом в несущей системе при выполнении ВВП и зависания все несущие винты, имеющие плоскости вращения их лопастей, размещенные над или под консолями соответствующих крыльев, работают по первому или второму способу соответственно по тянущей или толкающей схеме а, поворотные винты из них при соответствующем их отклонении от вертикали и соответствующем способе работы создают маршевую горизонтальную тягу при вынесенных плоскостях вращения их лопастей соответственно за переднюю или заднюю кромку верхнего крыла типа парасоль, но и полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами в каждой их группе таким образом, что в задней группе левый и правый нижние винты вращаются при виде сверху соответственно против и по часовой стрелке перед соответствующим бортом фюзеляжа и, тем самым, при выполнении режима зависания создают гармоничное сочетание поперечного и путевого управления и уменьшение вредного влияния поворотных верхних на нижние несущие винты, а также возможность их выполнения как с жестким креплением лопастей и без изменения циклического их шага, так и с возможностью изменения частоты их вращения, причем в схеме парасоль к задней части его пилона смонтирована конусная высоко расположенная хвостовая балка с оперением обратной V-образности, имеющим рулевые поверхности, а на профилированном пилоне, выполненным при соответствующем способе работы в виде киля прямой или обратной стреловидности, вынесен соответственно назад или вперед от центра масс совместно с каплевидным обтекателем прямого с положительным углом Ψ=+5° поперечного V крыла, имеющего стреловидность по передней кромке соответственно обратную с углом χ=-6,5° или прямую с углом χ=+10°, но и возможность поворота консолей крыла в плоскости хорды крыла назад по полету, уменьшая стояночную площадь при вертикальном расположении осей вращения верхних винтов и фиксированном размещении их лопастей вдоль консолей крыла типа парасоль, размещенных параллельно оси симметрии, при этом в каплевидном обтекателе, имеющем в верхней автоматически раскрываемой части контейнер спасательной системы с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры пилона, которая смонтирована совместно с центропланом верхнего крыла типа парасоль, имеющего элероны и образующего с тандемными крыльями обратной и прямой стреловидности схему биплан большой высоты и с Х-образной в плане конфигурацией при разнонаправленной стреловидности консолей низко расположенных крыльев, консоли которых в корневых их частях имеют узлы поворота, горизонтальные оси которых размещены под углом (βго) к оси симметрии (равным βго=90° -χнк, град., где: χнк _ угол обратной и прямой стреловидности соответственно нижних тандемных передних и задних крыльев) и обеспечивают возможность их отклонения на стоянке вверх с вертикальным расположением консолей нижних крыльев вдоль их лонжеронов при фиксированном размещении лопастей нижних винтов параллельно горизонтальной плоскости или вдоль соответствующих консолей нижних крыльев соответственно при минимально возможной высоте или ширине в стояночной его конфигурации, причем при зависании верхние винты снабжены возможностью их синфазного и дифференциального отклонения от вертикали вперед по направлению полета или назад соответственно для соответствующего как поступательного горизонтального полета, так и противодействия силе встречного или попутного ветра, но и выполнения управления по курсу, электрическая силовая установка (ЭСУ), имеющая четыре нижних электромотора, выполненных для удвоения времени зависания при ВВП в виде обратимых электромоторов-генераторов (ОЭМГ) с несущими винтами, авторотирующими от набегающего воздушного потока в полетной конфигурации крылатого автожира, вращают соответствующие ОЭМГ, работающие от внешнего источника энергии в режиме ветрогенераторов и подзаряжают блоки быстро заряжаемых аккумуляторных батарей, расположенных под днищем фюзеляжа в соответствующем отсеке между передней и задней парой упомянутого колесного шасси.
2. Авиатрансформер, преобразуемый в автомобиль по п. 1, отличающийся тем, что упомянутая ЭСУ выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей все электромоторы, ОЭМГ, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы, ОЭМГ и роторно-поршневой двигатель (РПД), переключающим генерирующую мощность и порядок подзарядки аккумуляторов и снабженной возможностью реализации двух способов работы с внутренним источником энергии - РПД, установленным в задней части фюзеляжа в двигательном отсеке и имеющим трансмиссию для передачи мощности на генератор для выработки генерирующей электрической мощности или при его полете на крейсерских режимах горизонтального полета и питания всех электромоторов, обеспечивающих необходимые режимы полета, или при его передвижении на земле с обеспечением необходимых режимов поездки при питании задних мотор-колес упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения со сложенными крыльями и фиксированными их винтами в конфигурации электрического автомобиля, сертифицированного для использования на дорогах общего пользования.
3. Авиатрансформер, преобразуемый в автомобиль по п. 1, отличающийся тем, что упомянутый РПД имеет трансмиссию для передачи мощности либо на генератор для выработки генерирующей электрической мощности при его полете на крейсерских режимах горизонтального полета и питания всех электромоторов, обеспечивающих необходимые режимы полета, либо через коробку передач на привод задних колес упомянутого четырехопорного колесного шасси, имеющего переднюю пару управляемых поворотных колес для наземного его передвижения со сложенными крыльями и фиксированными их винтами в конфигурации гибридного автомобиля, сертифицированного для использования на дорогах общего пользования, при этом упомянутый РПД сочетается с семидиапазонной трансмиссией: пять передач предназначены для езды (четыре передних и одна задняя), шестая передает крутящий момент только на генератор в полете, а седьмая ступень одновременно вращает и генератор, и приводит задние колеса для быстрого взлета при выполнении КВП.
4. Авиатрансформер, преобразуемый в автомобиль по любому из пп. 1-3, отличающийся тем, что при выполнении ВВП для повышения безопасности на боковых поверхностях нижних мотогондол, смонтированных на упомянутых низко расположенных крыльях, имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом автономные системы управления, включающие как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему экстренной автоматической посадки, которая включится в том случае, если пилот не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке.
| 0 |
|
SU164143A1 | |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| US 2016207368 A1, 21.07.2016 | |||
| CN 104925253 A, 23.09.2015 | |||
| US 2016114887 A1, 28.04.2016. | |||

