Изобретение относится к области цифровой обработки сигнала и более конкретно к демодуляции и декодированию видеосигналов, кодированных в соответствии с разными стандартами для спутниковой или наземной передачи.
Цифровые телевизионные системы для наземного или спутникового вещания модулируют и кодируют полные телевизионные сигналы для передачи различными способами и в разных форматах сигнала. Конкретный способ и соответствующий формат могут быть предписаны согласованными международными техническими условиями. Одним из этих технических условий, подготовленных для Европейской спутниковой системы связи, являются "Технические условия системы базовой линии модуляции/кодирования канала для спутникового цифрового многоканального телевидения" Европейского Союза вещания от 19 ноября 1993. Эта система также известна под названием прямого вещания видеосигналов (ПВВС) и служит для распределения как спутниковых сигналов, так и сигналов кабельного телевизионного вещания. Другой системой передачи, уже используемой в Соединенных Штатах и определяемой патентованными коммерческими техническими условиями, является цифровая спутниковая система (ЦСС). Но, будь ли формат передачи сигнала общепризнанным стандартом или патентованной технической спецификацией - приемное устройство видеосигналов все же должно обладать возможностями приема передаваемого формата сигнала. Система для приема различных передаваемых форматов сигнала в рамках разных типов передачи, таких, как спутниковая, наземная и кабельная передача, раскрыта в патенте США N 5497401 Дж. Стюарта "Компьютер метрики ветвления для декодера Витерби сверточного декодера перфорированного и прагматического решетчатого кода, используемого для многоканального приемника спутниковых, наземных и передаваемых по кабелю сжатых цифровых телевизионных данных с прямым исправлением ошибок".
Приемник видеосигналов использует функции демодуляции и декодирования, относящиеся к принимаемому конкретно формату сигнала. Функция демодуляции зависит от типа модуляции, формы сигнала и скорости передачи данных, используемых передающей системой, и также зависит от следующего: требуется ли единый или дифференцированный выходной сигнал. Функция декодирования зависит от типа кодирования, скремблирования, перемежения и скорости передачи кода, используемых кодером передающей системы.
Согласно настоящему изобретению схема обработки сигнала имеет множественные функции демодуляции и декодирования в рамках системы обработки цифрового полного телевизионного сигнала. В соответствии с принципами данного изобретения схема обработки цифрового сигнала обеспечивает адаптивные схемы демодуляции и декодирования, включающие разные типы функции демодуляции и декодирования.
В системе для приема и обработки сигнала несущей, модулированного посредством видеоинформации в одном из нескольких возможных форматов модуляции, используемых в спутниковой, наземной или кабельной передаче, демодулятор, согласно изобретению восстанавливает видеоинформацию. Демодулятор содержит схему восстановления синхронизации для восстановления данных синхронизации из модулированного сигнала несущей. Демодулятор также содержит адаптивную схему восстановления несущей, которая использует эти данные синхронизации для восстановления видеоинформации. В схеме восстановления несущей выбираемая сеть ограничителя прилагает один набор из нескольких возможных наборов порогов принятия решения к данным, получаемым схемой восстановления несущей, для восстановления видеоинформации.
Согласно одному из существенных признаков изобретения, адаптивный декодер получает декодированные выходные данные из восстановленной видеоинформации.
В соответствии с еще одним аспектом изобретения детектор качества сигнала использует сигналы схемы восстановления несущей для оценки ошибки в восстановленной видеоинформации. Адаптивную схему восстановления несущей автоматически конфигурируют для совместимости с модулированной несущей видеосигналов при реагировании на оценку ошибки.
В дальнейшем изобретение поясняется описанием конкретного варианта его воплощения со ссылками на сопровождающие чертежи, на которых:
фиг. 1 изображает блок-схему устройства для демодулирования и декодирования сигналов, кодированных в форматах ЦСС и ПВВС, согласно изобретению;
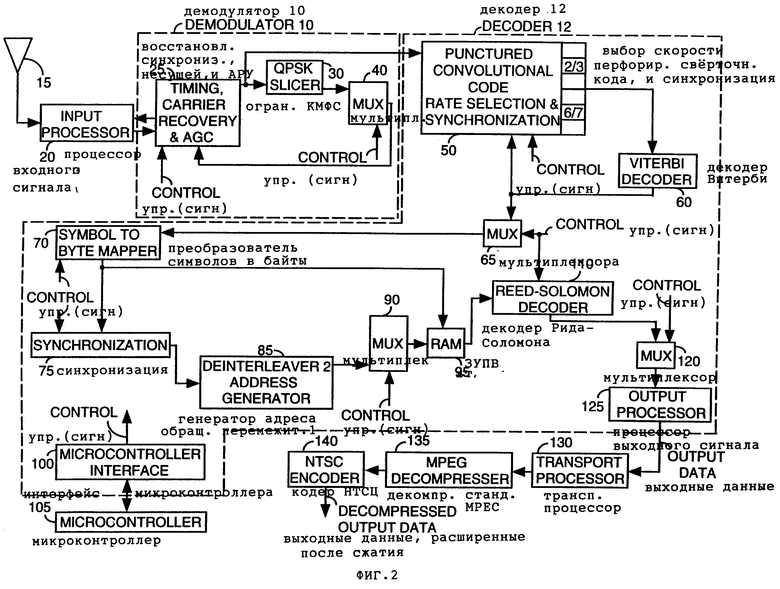
фиг. 2 - блок-схему элементов устройства, конфигурированных для демодулирования и декодирования ЦСС-формата спутникового сигнала, согласно изобретению;
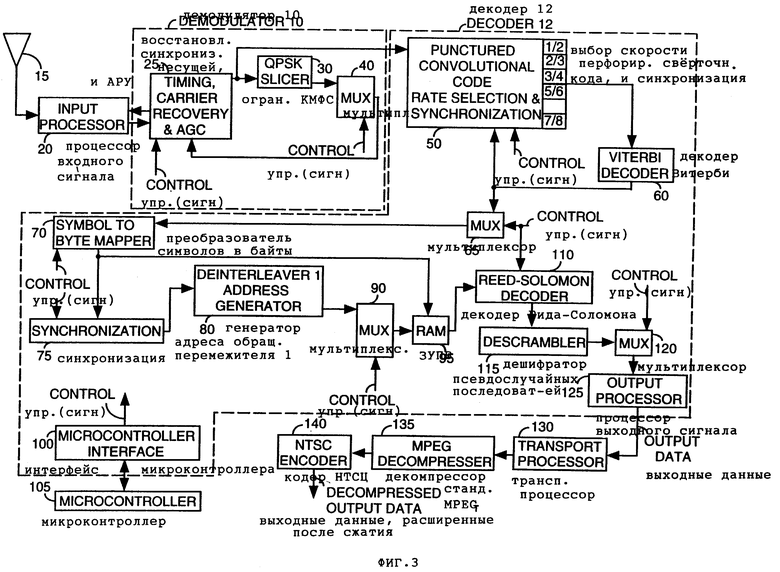
фиг 3 - блок-схему элементов устройства, конфигурированных для демодулирования и декодирования ПВВС-формата спутникового сигнала, согласно изобретению;
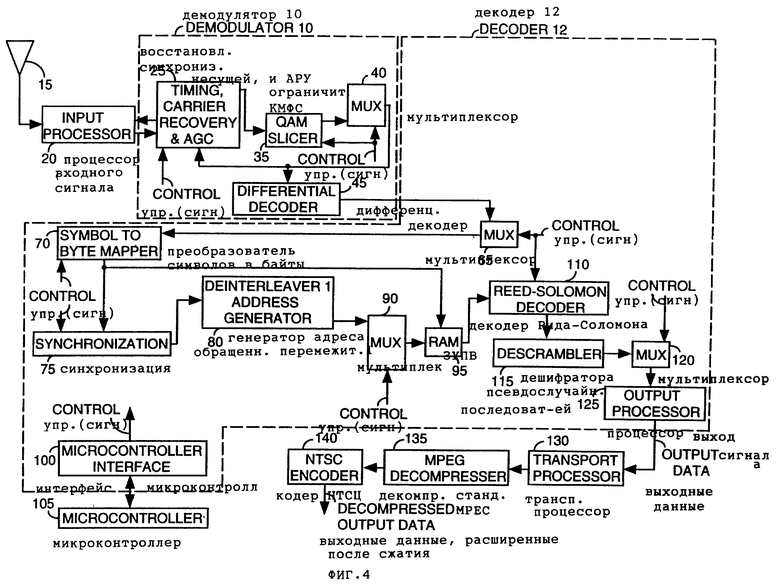
фиг. 4 - блок-схему функциональных элементов устройства, конфигурированных для демодулирования и декодирования ПВВС-формата кабельного сигнала, согласно изобретению;
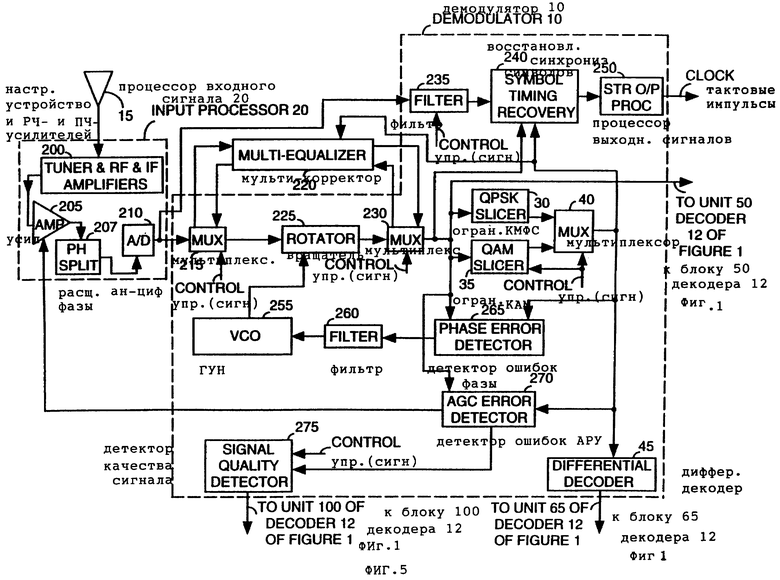
фиг. 5 - подробную блок-схему демодулирующего устройства, согласно изобретению;
фиг. 6 - блок-схему функции вычисления ошибки автоматического регулирования усиления демодулирующего устройства, согласно изобретению.
Конкретно, данная система для демодулирования и декодирования сигналов разных форматов сигнала, таких, как спутниковые и кабельные полные телевизионные сигналы, выполнена с возможностью быть конфигурируемой для демодулирования и декодирования сигналов в спутниковых-ЦСС, спутниковых-ПВВС или кабельных-ПВВС форматах сигнала. Это достигается доведением до максимума использования функций, которые являются общими для процесса демодулирования и декодирования этих трех форматов сигнала. Это также достигается посредством надлежащего подбора, выполнения и межсоединения функций демодулирования и декодирования.
Модулированную видеоданными несущую принимают антенной 15 (фиг. 1), обрабатывают и преобразуют в цифровую форму схемой 20. Полученный таким образом цифровой выходной сигнал декодируют демодулятором 10 и декодируют декодером 12. Выходной сигнал из декодера 12 далее обрабатывают для получения расширенных после сжатия выходных видеоданных, используемых для отображения устройством отображения. Как демодулятор 10, так и декодер 12 являются адаптивными схемами демодуляции и декодирования, включающими в себя разные типы функций демодуляции и декодирования, которые выбираются микроконтроллером 105 через интерфейс 100. Как демодулятор 10, так и декодер 12 конфигурируют сигналом управления от интерфейса 100 микроконтроллера. Состояние сигнала управления, обеспечиваемого интерфейсом 100, определяют сигналами, направляемыми микроконтроллером 105 к интерфейсу 100. Демодулятор 10 и декодер 12 (фиг. 2) конфигурируют для приема ЦСС-формата спутникового сигнала. В другом варианте демодулятор 10 и декодер 12 (фиг. 3,4) конфигурируют для приема спутникового-ППВС и кабельного-ППВС форматов сигнала соответственно. Как конфигурируемый демодулятор 10, так и конфигурируемый декодер 12 можно преимущественно разместить в одном устройстве обработки сигналов, например, таком, как интегральная схема.
Конфигурируемый демодулятор 10 обеспечивает функции, необходимые для демодулирования каждого из ЦСС- и ПВВС-форматов сигнала. Основными функциями демодулятора 10 являются восстановление и слежение за частотой несущей, восстановление частоты тактовых импульсов передаваемых данных и восстановление самих видеоданных. Помимо этого демодулятор содержит схему автоматического регулирования усиления (фиг. 5), чтобы установить необходимый коэффициент преобразования аналоговых входных данных в аналого-цифровые в блоке 20. Функции демодулятора осуществляют блоки 25, 30, 35, 40 и 45. Операции восстановления синхронизации, восстановления несущей, операции ограничителя и дифференциального декодера по отдельности известны и изложены, например, в ссылке "Цифровая связь". Ли и Мессершмидт, Клувер Академик Пресс, Бостон, США, 1988.
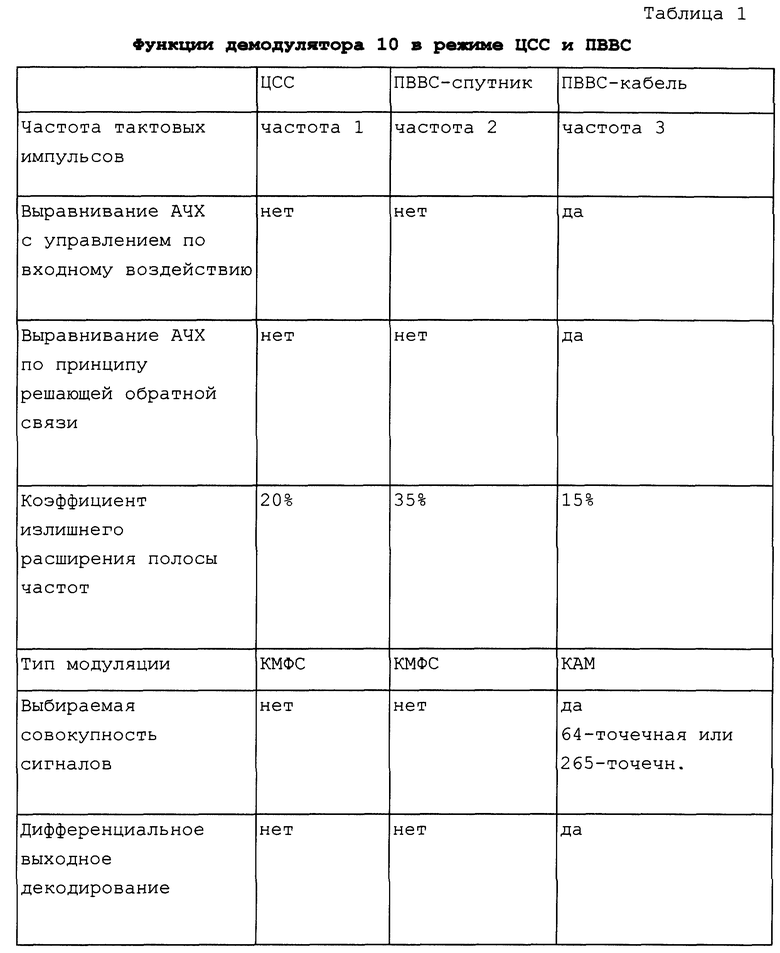
Различные функциональные характеристики демодулятора 10 в трех режимах формата сигнала даны в табл. 1.
Демодулятор 10 согласует различия в частоте тактовых импульсов передачи данных, выравнивании амплитудно-частотной характеристики с управлением по входному воздействию, выравнивании амплитудно-частотной характеристики по принципу решающей обратной связи, коэффициенте излишнего расширения полосы частот, типе модуляции, совокупности символов и декодировании для трех форматов входного сигнала, представленных в табл. 1. Различие в частоте тактовых импульсов согласуют за счет того, что система обладает возможностью работать на самых высоких и самых нижних частотах тактовых импульсов передачи данных трех форматов входных сигналов. Прочие различия согласуют конфигурированием соответствующих функций демодуляции согласно изложенному ниже.
Входной сигнал от антенны 15 (фиг. 5) принимают, преобразуют в цифровую форму и обрабатывают входной схемой 20. Схема 20 содержит радиочастотное (РЧ) настроечное устройство и смеситель промежуточной частоты (ПЧ) и каскады усиления 200 для преобразования с понижением частоты входного видеосигнала до полосы более нижних частот, который можно использовать для дальнейшей обработки. Схема 20 также содержит усилитель с регулируемым коэффициентом усиления 205 и схему разделения фазы 207. Схема разделения фазы разделяет принимаемый видеосигнал на квадратурные составляющие I и Q. Усилитель 205 устанавливает соответствие составляющих I и Q для преобразования в цифровую форму аналого-цифровыми преобразователями 210 в схеме 20. Сигнал автоматической регулировки усиления (АРУ) для усилителя 205 формирует схемой детектора ошибки АРУ 270, которая описывается ниже. Цифровой сигнал из блока 210 подают на мультиплексор 215 демодулятора 10.
В спутниковом режиме (ЦСС или ПВВС) мультиплексор 215, в соответствии с определением сигнала управления, направляет преобразованные в цифровую форму видеосигналы от схемы 20 к вращателю 225 и обходит корректор выравнивания амплитудно- частотной характеристики с управлением по входному воздействию (АЧХУВВ) в блоке 220. В кабельном режиме мультиплексор 215, в соответствии с определением сигнала управления, направляет преобразованные в цифровую форму сигналы к вращателю 225 (например, к комплексному умножителю) через корректор АЧХУВВ блока 220. Корректор АЧХУВВ является адаптивным цифровым фильтром типа КИХ (импульсная характеристика с конечной длительностью) и компенсирует такие возмущения канала передачи, как неоднородности частоты/фазы.
Выходные данные от мультиплексора 215 обрабатывают системой восстановления несущей, состоящей из блоков 225, 220, 230, 30, 35, 40, 265, 260 и 255, для восстановления видеоинформации полосы частот модулирующих сигналов. Данные из блока 215 являются последовательностью символов в виде комплексных квадратурных составляющих I и Q на входе во вращатель 225 системы восстановления несущей. Эта последовательность символов является последовательностью двоичных данных, в которой каждый символ представлен присвоенными цифровыми величинами. Известно, что набор символов можно представить как набор точек, называемый совокупностью сигналов. ЦСС- и ПВСС-форматы спутникового сигнала используют 4-точечную совокупность символов квадратурной манипуляции фазовым сдвигом (КМФС); ПВВС-формат кабельного сигнала использует 64- или 256-точечную совокупность символов квадратурной амплитудной модуляции (КАМ). Система восстановления несущей компенсирует смещение точки символа и вращение точки символа, обусловленные дрожанием фазы и частоты в частоте несущей, имевшим место в канале передачи. Это осуществляют выделением сигнала ошибки из восстановленных данных, после чего сигнал ошибки прилагают к входным данным системы для компенсирования дрожания фазы и частоты с помощью комплексного умножителя (вращателя 225). Каждую из функций элементов системы восстановления несущей выполняют для обеих комплексных составляющих сигнала I и Q с помощью известных способов обработки сигнала.
Комплексная функция вращателя 225 умножает выходные данные блока 215 на составляющие компенсации от генератора, управляемого напряжением (ГУН), 255 для получения компенсированных данных в качестве выходного сигнала.
Компенсированные данные от вращателя 225 направляют к ограничителям 30 и 35 через мультиплексор 230. В спутниковом режиме сигнал управления обусловливает обход мультиплексором 230 корректора выравнивания АЧХ по принципу решающей обратной связи (АЧХРОС) блока 220. В противоположность этому, в кабельном режиме сигнал управления обусловливает направление мультиплексором 230 компенсированных данных от вращателя 225 к корректору АЧХРОС в блоке 220. Корректор АЧХРОС суммирует эти компенсированные данные от вращателя 225 с преобразованным выбранным исходным сигналом ограничителя от мультиплексора 40. Эта операция суммирования является известным процессом выравнивания амплитудно-частотной характеристики по принципу решающей обратной связи и уменьшает межсимвольные помехи в выходном сигнале компенсированных данных вращателя 225. В тех случаях, когда эти помехи не являются значительными, АЧХРОС можно не использовать. Выравненные по принципу решающей обратной связи данные из блока 220 возвращают в мультиплексор 230 и направляют к ограничителям 30, 35 и блоку Витерби 50 декодера 12.
Оба мультиплексора 230 и 215 могут быть частью корректора 220, либо их можно использовать, если нужна фиксированная спутниковая, наземная или кабельная конфигурация демодуляции. Помимо этого, хотя корректоры АЧХУВВ и АЧХРОС оба изображены как внешние по отношению к демодулятору 10, их можно включить в демодулятор 10 в единую интегральную схему. В этом случае адаптивные корректоры АЧХУВВ и АЧХРОС можно конфигурировать для конкретного режима посредством программирования соответствующих коэффициентов фильтра с помощью сигнала управления.
В соответствии с табл. 1 спутниковые форматы входного сигнала модулируют посредством КМФС, а кабельный формат входного сигнала является форматом типа КАМ. Конкретный ограничитель, используемый в системе, выбирают сигналом управления конфигурации посредством мультиплексора 40 в зависимости от того, является ли формат входного сигнала типом спутниковой КМФС или кабельной КАМ. Кроме этого, в кабельном режиме ограничитель КАМ 35 также конфигурируют для определенной совокупности символов КАМ, как указано в табл. 1. Поэтому ограничитель 35 имеет функцию ограничителя либо 64-точечной, либо 256-точечной совокупности в ответ на сигнал управления конфигурацией.
Скорректированный выходной сигнал от мультиплексора 230, который не выравнен в спутниковом режиме, а выравнен по принципу решающей обратной связи в кабельном режиме, направляют к ограничителям 30 и 35. Ограничитель 30 обрабатывает скорректированный выходной сигнал от мультиплексора 230 для восстановления данных из модулированных сигналов КМФС. Аналогично ограничитель 35 восстанавливает данные из сигналов КАМ. Ограничители 30 и 35 прилагают ряд порогов принятия решения к скорректированному выходному сигналу от мультиплексора 230 для восстановления последовательности символов первоначальных входных данных демодулятора 10. Затем в спутниковом режиме данные, используемые приемником, восстанавливают из скорректированного выходного сигнала мультиплексора 230 посредством блоков 50 и 60 детектирования Витерби декодера 12 (фиг. 1). В противоположность этому в кабельном режиме восстановленные данные, используемые приемником, обеспечивают выбранным ограничителем (30 или 35) и выводят мультиплексором 40. Выходной сигнал мультиплексора 40 дифференциальным методом декодируют блоком 45 и направляют к мультиплексору 65 декодера 12. В кабельном режиме мультиплексор 65 реагирует на сигнал управления выбором дифференциально декодированного выходного сигнала от блока 45 для последующей обработки и обходит блоки 50 и 60 декодера Витерби. Дифференциальное кодирование/декодирование является известным способом, используемым в кабельном режиме для решения проблемы, связанной с потенциальной неясностью фазы в выделенной несущей и восстановленной совокупности символов. Восстановленный выходной сигнал данных от мультиплексора 40 применяют и в спутниковом, и в кабельном режимах системой восстановления несущей, схемой восстановления синхронизации, детектором качества сигнала и функциями АРУ демодулятора 10.
На фиг. 5 входной сигнал ограничителей 30, 35 и выходной сигнал восстановленных данных от мультиплексора 40 обрабатывают детектором 265 ошибок фазы системы восстановления несущей, фильтром нижних частот 260 и ГУНом 255 для получения составляющих сигнала компенсации обратной связи I и Q, используемых вращателем 225. Детектор фазы 265 определяет сигнал ошибки, характеризующий разность фазы и частоты между входным сигналом ограничителей 30 и 35 и выходным сигналом ограничителя от мультиплексора 40. Этот сигнал ошибки фильтруют по низким частотам блоком 260 и используют ГУНом 255 для генерирования квадратурных составляющих компенсации I и Q, которые прикладывают вращателем 225 для направления сигналов, в которых компенсированы ошибки, к мультиплексору 230. Таким образом, сигналы, прилагаемые к мультиплексору 230, компенсируют относительно ошибок фазы и частоты, связанных со смещением точки символа и вращением точки символа, которые имели место во время передачи.
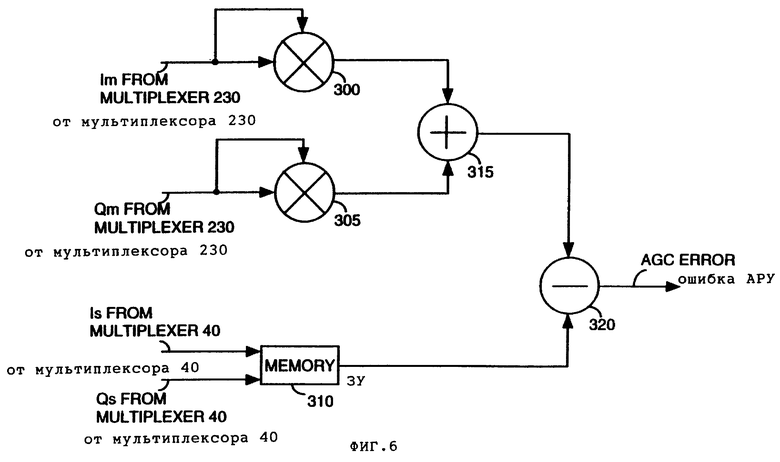
Входной сигнал ограничителей 30, 35 и выходной сигнал восстановленных данных от мультиплексора 40 также используют детектором 270 ошибки АРУ для формирования сигнала регулирования коэффициента усиления. Этот сигнал регулирует коэффициент усиления усилителя 205 в процессоре 20 и обеспечивает надлежащее шкалирование входных сигналов I и Q в аналоговые преобразователи процессора 20 в соответствии с требованиями должного аналого-цифрового преобразования. Детектор 270 вычисляет ошибку исходя из разности между суммой квадратов квадратурных составляющих сигнала, вводимого в ограничители 30, 35 (Im, Qm), и суммой квадратов квадратурных составляющих выходного сигнала от мультиплексора 40 (Is, Qs).
На фиг. 6 показана схема формирования функции вычисления ошибки АРУ в детекторе 270. Квадратурные входные составляющие 1m, Qm ограничителя 30, 35 от мультиплексора 230 возводятся в квадрат умножителями 300 и 305 и суммируются сумматором 315. Помимо этого квадратурные составляющие Is, Qs выходного сигнала восстановленных данных от мультиплексора 40 используют для выборки запомненного значения в справочной таблице в запоминающем устройстве 310. Это запомненное значение характеризует сумму возведенных в квадрат значений Is, Qs. Запомненное значение от запоминающего устройства 310 затем вычитают из выходного сигнала сумматора 315 вычитателем 320 для получения итоговой ошибки АРУ. Вычисленную ошибку АРУ, используемую детектором 270, определяют согласно уравнению
Ошибка АРУ = (Im2 + Qm2) - (Iss2 + Qss2)
Член (Im2 + Qm2) получают из блока 315 и член (Iss2 + Qss2) получают из справочной таблицы 310 как аппроксимацию (Is2 + Qs2) с помощью Is и Qs как указателей входа. Ошибка АРУ является функцией разности векторного расстояния между точкой Im, Qm и точкой Is, Qs относительно исходной точки (O,O). Она также не зависит от угловой разности между векторами, представленными квадратурными составляющими Im, Qm и Is, Qs. Поскольку сигнал ошибки АРУ имеет такие характеристики, его можно обрабатывать фильтрацией нижних частот и использовать для регулирования коэффициента усиления усилителя АРУ 205.
Вычисление ошибки АРУ используют предпочтительно в отношении фактической ошибки для уменьшения сложности вычисления. Фактическая ошибка АРУ определяется следующим образом.
Альтернативно функцию фактической ошибки или другой модифицированный вариант функции фактической ошибки можно использовать вместо сигнала ошибки АРУ, изображенного на фиг. 6.
Вычисленный сигнал ошибки АРУ фильтруют на нижних частотах в детекторе 270 (фиг. 5) для получения выходного сигнала для регулирования коэффициента усиления усилителя 205. Сигнал ошибки АРУ также направляют к блоку 275 детектора качества сигнала.
Детектор 275 качества сигнала оценивает отношение сигнал/шум (СШ) входного сигнала, вводимого в демодулятор 10, с помощью сигнала ошибки АРУ, из блока 270. Блок 270 сначала формирует абсолютное значение сигнала ошибки АРУ. Затем блок 270 осуществляет наложение порога принятия решения к результату, чтобы определить, находится ли ошибка АРУ в запрограммированном диапазоне значений. Это дает определение величины значения ошибки АРУ, которая соответствует оценке значения СШ. Эту оценку СШ направляют к микроконтроллеру 105 через интерфейс 100 (фиг. 1). Микроконтроллер 105 программируют для определения, находится ли значение СШ вне заданного диапазона. Если значение СШ находится вне заданного диапазона, то микроконтроллер 105 может вновь конфигурировать систему, включая все конфигурируемые элементы демодулятора 10, корректора 220 и декодера 12 для разных форматов входного сигнала. Таким образом микроконтроллер 105 может повторно вновь конфигурировать функции демодулятора 10 и декодера 12 с помощью сигнала управления через интерфейс 100 для демодулирования и декодирования задействованного формата входного сигнала. Эту функцию конфигурации можно программировать для ее выполнения как части процедуры инициализации или при реагировании на входной сигнал в микроконтроллер от доступного оператору переключателя,
Кроме этого, детектор 275 качества сигнала может использовать другие способы для оценки ошибки или СШ в демодулированных данных. Эти способы включают, например, вычисление среднего квадрата ошибки между данными до ограничителя и после ограничителя в системе восстановления несущей. Вычисление среднего квадрата ошибки и другие способы оценки ошибки раскрыты в ссылке "Цифровая связь". Ли и Мессершмидт (Клувер Академик Пресс, Бостон, США, 1988).
Тактовые импульсы выборки и синхронизации, используемые демодулятором 10, генерируют элементами, содержащими фильтр 235, блок 240 восстановления синхронизации символов и выходной процессор 250. Выходные сигналы от аналого-цифровых преобразователей 210 процессора 20 подвергают полосовой фильтрации конфигурируемым фильтром 235 для компенсирования изменений в излишней ширине полосы частот (ИШ), выражаемой коэффициентом излишнего расширения полосы частот (КИШ). Хотя в предпочтительном варианте осуществления используется полосовой фильтр, для компенсации КИШ можно использовать другие характеристики фильтра, такие, как фильтр нижних частот. Полученный выход, входные сигналы ограничителей 30 и 35 и выбранный выходной сигнал ограничителя мультиплексора 40 используют в блоке 240 восстановления синхронизации для генерирования тактовых импульсов выборки и синхронизации. Эти восстановленные тактовые импульсы соответствуют тактовым импульсам передатчика и используются для синхронизации работы демодулятора 10, процессора 20 (в частности, аналого-цифрового преобразования) и корректора 220.
При выделении нужной информации синхронизации элементы синхронизации (фиг. 5) используют цифровой сигнал аналого-цифровых преобразователей 210. Несмотря на то, что сигнал до преобразования в цифровую форму преобразователями 210 имеет одинаковую высокую форму косинусоиды для всех трех форматов сигнала, вариации в КИШ, данные в табл. 1, могут видоизменить эту форму. КИШ является параметром, указывающим степень, в которой фактическая ширина полосы частот системы превышает минимальную ширину полосы частот, требуемую для обеспечения точного восстановления сигнала. Как КИШ, так и высокая форма косинусоиды описаны в "Цифровой связи", упоминаемой выше. Вариации в КИШ между форматами входного сигнала могут обусловить ошибку в восстановленных тактовых импульсах синхронизации. Для компенсирования этой ошибки синхронизации выходные сигналы I и Q от аналого-цифровых преобразователей 210 фильтруют блоком 235 до генерации синхронизации и тактовых импульсов в блоке 240. Фильтр 235 программируют микроконтроллером 105 через интерфейс 100 для фильтрации цифрового видеосигнала от преобразователей 210 для должного восстановления тактовых импульсов и синхронизации для каждого из значений КИШ трех форматов входного сигнала в соответствии с данными табл. 1. Фильтр 235 можно также программировать для передачи сигналов без фильтрации, например, для проверки.
В блоке 240 данные, в которых ошибки компенсированы, от фильтра 235 сравнивают как с данными, вводимыми в ограничители 30, 35, так и с восстановленными данными, выводимыми из мультиплексора 40. Исходя из этого сравнения, блок 240 выделяет сигнал ошибки фазы и синхронизации, который поступает в процессор 250 выходного сигнала синхронизации символов. Сравнение сигнала и выделение сигнала ошибки синхронизации выполняют в соответствии с известными принципами, подробно изложенными, например, в ссылке "Детектор ошибки синхронизации ДПФК/КМФС для определенных приемников", Ф.М. Гарднер, бюллетень "Системы связи" ИИЭТРЭ, май 1986. Сигнал ошибки фазы и синхронизации от блока 240 фильтруют и буферизируют выходным процессором 250 для направления сигнала управления к устройству кварцевого генератора, управляемого напряжением (КГУН), который содержится в блоке 250. В предпочтительном варианте осуществления КГУН является отдельным устройством, хотя можно применять и интегральный КГУН. Вход сигнала управления в КГУН управляет как частотой и фазой выборки, так и сигналом тактовых импульсов синхронизации, выводимым КГУНом. Этот выходной сигнал выборки и тактовых импульсов синхронизации используется аналого-цифровыми преобразователями 210 и другими элементами демодулятора.
Конфигурируемый декодер 12 (фиг. 1) выполняет функции, необходимые для декодирования ЦСС- и ПВВС-форматов сигнала.
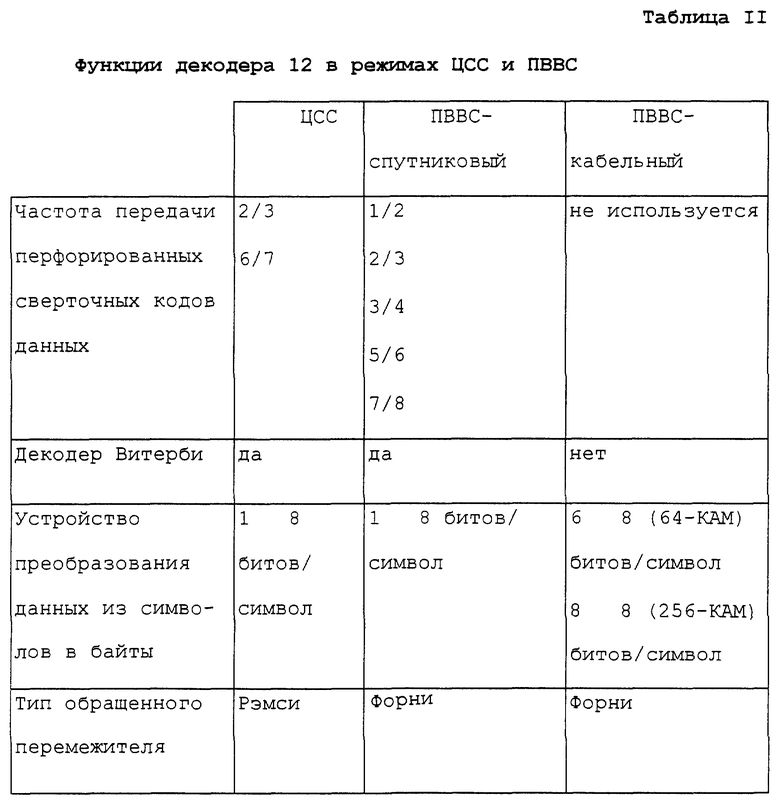
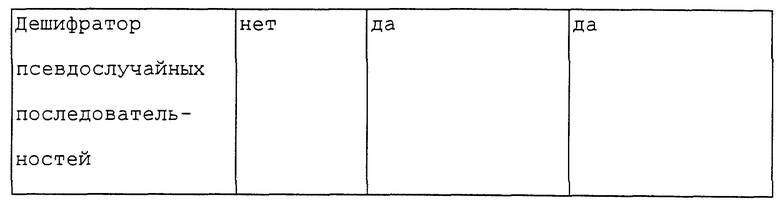
Основные элементы декодера 12 следующие: перфорированный сверточный декодер Витерби 50, 60, устройство преобразования символов в байты 70, схема обращенного перемежителя 75, 80, 95, декодер Рида-Сломона 110 и дешифратор псевдослучайных последовательностей 115. Эти отдельные функции известны и изложены, например, в ссылке "Цифровая связь". Рабочие характеристики элементов декодера 12 даны в табл. II для режимов ЦСС и ПВВС.
Декодер 12 согласует разности скорости передачи кода, типа обращенного перемежителя, требования по преобразованию символов в байты и требования к дешифратору псевдослучайных последовательностей для трех форматов входного сигнала в соответствии с табл. II. Различия согласуют конфигурированием функций декодера 12 в соответствии с изложенным ниже.
Каскады декодера 50 и 60 образуют перфорированный сверточный декодер Витерби для декодирования разных скоростей передачи кода согласно табл. II. Блоки 50 и 60 обрабатывают, декодируют и исправляют ошибки фильтрованного цифрового видеосигнала, выводимого из блока 25 на входе блока 50. Эти блоки обеспечивают первый уровень коррекции случайных ошибок передачи. В ЦСС-конфигурации спутникового сигнала можно выбрать одну из двух возможных скоростей передачи кода (2/3 или 6/7). В противоположность этому в ПВВС-конфигурации спутникового сигнала можно выбрать одну из пяти возможных скоростей передачи кода (1/2, 2/3, 3/4, 5/6 или 7/8). Термин "скорость передачи кода" в этом контексте определяет дополнение исправления ошибок, содержащееся в кодированных данных. Например, скорость передачи кода 1/2 означает, что 2 разряда данных кодируют для каждого разряда входных данных. Аналогично, скорость передачи кода 7/8 означает, что 8 разрядов данных кодируют для каждых 7 разрядов входных данных. Изменяемую скорость передачи кода передаваемого потока данных обеспечивают стиранием разрядов из потока кодированных данных, который кодирован по основной скорости передачи кода 1/2. Например, чтобы получить скорость передачи кода 2/3, один из 4 разрядов, полученных кодированием 2 разрядов входных данных на скорости передачи кода 1/2, стирают, оставляя 3 разряда для передачи. Остальные скорости передачи кода получают по тому же принципу.
Блок 50 обеспечивает необходимые требования для синхронизации входного потока данных видеосигналов, чтобы создать возможность декодирования Витерби и поместить фиктивные разряды "структурного нуля". Это осуществляют с помощью машины состояния синхронизации, которую конфигурируют сигналом управления через интерфейс 100 для определенного принимаемого кода. Синхронизацию получают посредством опознания и устранения неясностей позиции разряда и фазы во входном потоке данных. Неясности позиции разряда и фазы опознают процессом приема, декодирования, повторного кодирования и сравнения повторно кодированных данных с входными данными. На успешную синхронизацию указывает приемлемый коэффициент ошибок между повторно кодированными и первоначальными входными данными. Для этого процесса все возможные состояния, возникающие в связи с неясностями позиции фазы и разряда во входном сигнале, проверяют машиной состояния синхронизации. Если синхронизация не достигнута, то блок 50 генерирует указатель отсутствия синхронизации. Этот указатель обусловливает введение ГУНом 255 в демодуляторе 10 (фиг. 5) зависимого от типа и конфигурации кода временного сдвига во входной поток данных. Этот процесс синхронизации повторяют до тех пор, пока не будет достигнута синхронизация. Это предпочтительный способ синхронизации, но возможны также другие способы, использующие действующие последовательности.
После того, как поток данных синхронизирован указанным выше образом, в поток данных помешают замещающие фиктивные разряды "структурного нуля", по количеству равные разрядам, стертым в приемнике. Конфигурируемую машину состояния в блоке 50 используют для помещения соответствующих фиктивных разрядов "структурного нуля" для определенного типа кода и скорости передачи кода принимаемого потока данных. Блок 50 конфигурируют для выбранной скорости передачи кода путем загрузки регистра в блоке 50 при реагировании на сигнал управления, направленный от микроконтроллера 105 через интерфейс 100. Машину состояния для помещения разряда структурного нуля конфигурируют для помещения правильного числа разрядов структурного нуля для выбора надлежащей скорости передачи данных при реагировании на загруженную информацию регистра. Аналогично схему синхронизации Витерби блока 50 также надлежащим образом конфигурируют посредством этой информации. После помещения разряда "структурного нуля" фиксированную основную скорость передачи кода 1/2 выводят из блока 50. Это означает, что все различные передаваемые скорости передачи данных, указанные в табл. II, кодируют с помощью единого декодера Витерби 60, который имеет фиксированную основную скорость передачи кода (1/2). Помещаемые в блоке 50 разряды "структурного нуля" опознают в декодере Витерби 60. Полученная в результате этого информация дает возможность алгоритму декодера Витерби правильно декодировать данные. Получаемый таким образом выходной сигнал декодера Витерби 60 направляют к мультиплексору 65.
В спутниковой конфигурации входного сигнала выходной сигнал декодера Витерби 60 направляют к преобразователю символов в байты 70 мультиплексором 65 при реагировании на сигнал управления от интерфейса 100. Преобразователь 70 преобразует единый выходной сигнал разрядов декодера Витерби 60 в 8-разрядный преобразованный байт данных. Либо в кабельной конфигурации входного сигнала дифференциально декодированный выходной сигнал блока 45 направляют к преобразователю 70 мультиплексором 65 при реагировании на состояние сигнала управления. Кроме этого, в кабельной конфигурации входного сигнала функция преобразователя 70 варьируется в зависимости от выбора 64- или 256-точечной совокупности символов. Если выбрана 64-точечная КАМ-совокупность, то преобразователь 70 преобразует 6-разрядный код символов для каждой из 64 точек совокупности в 8-разрядный преобразованный байт данных. В противоположность этому в 256-точечной конфигурации КАМ-совокупности преобразователь 70 преобразует 8-разрядный код символов для каждой из 256 точек совокупности в 8-разрядный преобразованный байт данных.
Выходной сигнал преобразованных данных от преобразователя 70 направляют к блоку синхронизации 75 и запоминающему устройству 95 для дальнейшей обработки. Этот выходной сигнал преобразованных данных является перемеженными данными. То есть, данными, которые расположили в заданной последовательности перед передачей. Цель операции перемежения заключается в расширении или рассредоточении данных во времени в заданной последовательности, благодаря чему потеря данных во время передачи не приводит к потере смежных данных. Вместо этого какие бы то ни было потерянные данные рассредоточивают, и поэтому их гораздо легче скрывать или корректировать. Блок синхронизации 75 и запоминающее устройство 95 вместе с генераторами 80, 85 адреса обращенного перемежителя и мультиплексором 90 образуют конфигурируемую функцию обращенного перемежителя для восстановления данных в их первоначальной последовательности. В режиме ЦСС используют алгоритм обращенного перемежения, предложенный Рэмси и изложенный в статье "Реализация оптимальных перемежителей" бюллетеня "Теория информации" ИИЭТРЭ, т. IT-15, май 1970. В ПВВС-режиме используют алгоритм, предложенный Форни и изложенный в статье "Коды исправления пакетов данных для классического пакетного канала" бюллетень "Техника связи" ИИЭТРЭ, т. СОМ-19, октябрь, 1971.
Схема синхронизации 75 детектирует слова синхронизации в перемеженном сигнале данных и направляет выходные сигналы, синхронизированные с началом данных. Слова синхронизации сами по себе не являются перемеженными, а имеют место через периодические интервалы времени. Для детектирования слов синхронизации информацию, опознающую слова синхронизации и ожидаемую длину пакетов данных, загружают в регистры в блоке 75. Эту информацию обеспечивают микроконтроллером 105 через интерфейс 100 посредством сигнала управления. Выходные сигналы синхронизации от блока 75 направляют к генераторам адреса 80 и 85 для синхронизации сигналов адреса от блоков 80 и 85 с перемеженными данными от преобразователя 70. Генерированные сигналы адреса затем прилагают к запоминающему устройству 95 через мультиплексор 90.
В режиме ЦСС мультиплексор 90 при реагировании на состояние сигнала управления направляет сигналы адреса от генератора 80 к запоминающему устройству 95. В режиме ПВВС мультиплексор 90 прилагает сигналы адреса от генератора 85 к запоминающему устройству 95 при реагировании на отличающееся состояние сигнала управления. Генератор 80 используют в режиме ЦСС для выполнения функции обращенного перемежения Рэмси, а генератор 85 используют в режиме ПВВС для осуществления функции обращенного перемежения Форни. Эти функции обращенного перемежения выполняют посредством логических машин состояния. Генераторы 80 и 85 формируют последовательность адресов считывания и записи и соответствующие сигналы управления запоминающим устройством (такие, как разрешающие сигналы считывания, записи и выведения), которые направляют через мультиплексор 90 к запоминающему устройству 95. Последовательность адресов записи, формируемая генераторами 80, 85, обеспечивает запись перемеженных данных от преобразователя 70 в ячейки памяти запоминающего устройства 95 в том порядке, в котором принимают входные перемеженные данные. Последовательность адресов считывания из генераторов 80, 85 обеспечивает считывание данных из запоминающего устройства 95 в нужном обращение перемеженном порядке. Полученные таким образом обращенно перемеженные выходные данные из запоминающего устройства 95 направляют к декодеру 110 Рида-Соломона.
Декодер 110 Рида-Соломона действует во всех режимах и декодер 12 декодирует обращенно перемеженные выходные данные из запоминающего устройства 95 и исправляет в них ошибки. Декодер 110 Рида-Соломона конфигурируют внутренними регистрами, которые загружают при реагировании на сигнал управления от интерфейса 100. Загружаемая в эти регистры информация конфигурирует блок 110, чтобы декодировать определенные длины пакетов данных, ожидаемые в обращенно перемеженных выходных данных из запоминающего устройства 95. Эта информация может также содержать прочие параметры конфигурации, такие как число и тип ожидаемых в данных контрольных разрядов четности, число байтов исправления ошибок в одном пакете и параметры выбора типа применяемой функции декодера Рида-Соломона.
Данные, декодированные декодером Рида-Соломона и выводимые из блока 110, направляют к дешифратору псевдослучайных последовательностей 115 и к мультиплексору 120. В режиме ЦСС мультиплексор 120 при реагировании на сигнал управления передает декодированные данные от блока 110 к выходному процессору 125. В противоположность этому в обоих режимах ПВСС, кабельном и спутниковом, как указано в табл. II, декодированные данные из блока 110 сначала дешифруют в дешифраторе псевдослучайных последовательностей 115. В этих режимах мультиплексор 120 реагирует на отличающееся состояние сигнала управления и передает дешифрованный по псевдослучайным последовательностям выходной сигнал из блока 115 к выходному процессору 125. Выходной процессор 125 обрабатывает выходные данные от мультиплексора 120 и формирует выходные данные для системы (фиг. 1). Процессор 125 формирует функции, необходимые для межсоединения выходных данных с другими системами обработки в приемнике видеосигналов. Эти функции включают в себя согласование выходных данных с соответствующими логическими уровнями и обеспечение сигнала тактовых импульсов, относящегося к сигналу выходных данных, для осуществления межсоединения с прочими схемами приемника видеосигналов. Наконец, выходные данные от блока 125 обрабатывают совместимым со стандартом MPEG транспортным процессором 130 для получения информации синхронизации и указания ошибки, которую используют для расширения после сжатия видеоданных, хотя в данной системе совместимость со стандартом MPEG не является существенным условием. Транспортный процессор 130 также отделяет данные согласно типу, исходя из анализа заголовочной информации. Выходные данные из процессора 130 расширяют после сжатия MPEG-декомпрессором 135, чтобы получить видеоданные, пригодные для кодирования, в качестве сигнала формата НТСЦ, кодером НТСЦ 140. Кодированные расширенные после сжатия выходные данные из блока 140 направляют к схемам обработки отображения, которые содержат устройство отображения (не показано).
В варианте осуществления на фиг. 2 демодулятор 10 и декодер 12 (фиг. 1) конфигурируют посредством сигнала управления для обработки ЦСС-формата спутникового сигнала. Схемы выполняют те же функции, что и для фиг. 1. В этом ЦСС-режиме система АРУ демодулятора 10 использует выходной сигнал ограничителя КМФС через мультиплексор 40. Получаемый таким образом отрегулированный по коэффициенту усиления и фильтрованный выход цифрового видеосигнала из блока 25 затем обрабатывают, декодируют алгоритмом Витерби и исправляют в нем ошибки блоками 50 и 60 декодера 12. В этом режиме ЦСС блок 50 можно конфигурировать либо для скорости передачи кода 2/3, или 6/7 в соответствии с изложенным выше. Полученный таким образом декодированный алгоритмом Витерби выходной сигнал из блока 60 направляют через мультиплексор 65 к преобразователю символов в байты 70. Выходной сигнал преобразователя 70 обращенно перемежают сигналами блоков 75, 85, 90 и 95, которые конфигурируют, например, для функции обращенного перемежителя Рэмси. Обращенно перемеженный выходной сигнал из запоминающего устройства 95 декодируют декодером Рида-Соломона 110 и направляют через мультиплексор 120 к выходному процессору 125. Декодированный, демодулированный выходной сигнал от процессора 125 обрабатывают схемами 130, 135 и 140.
В предпочтительном варианте осуществления демодулятор 10 (фиг. 3) и декодер 12 конфигурируют посредством сигнала управления для обработки ПВВС-формата спутникового сигнала.
В спутниковом ПВВС-режиме, как и в режиме ЦСС, система АРУ демодулятора 10 использует выходной сигнал ограничителя КМФС через мультиплексор 40. Получаемый таким образом отрегулированный по коэффициенту усиления, отфильтрованный, преобразованный в цифровую форму выход видеосигнала из блока 25 затем обрабатывают, декодируют алгоритмом Витерби и исправляют в нем ошибки блоками 50 и 60 декодера 12. В режиме ПВВС, в противоположность режиму ЦСС, блок 50 можно конфигурировать для пяти различных скоростей передачи кода (1/2, 2/3, 3/4, 5/6 и 7/8). Полученный таким образом декодированный алгоритм Витерби выходной сигнал от блока 60 направляют через мультиплексор 65 к преобразователю символов в байты 70. Выходной сигнал преобразователя 70 обращенно перемежают сигналами блоков 75, 80, 90 и 95, которые конфигурируют для функции обращенного перемежителя Форни. Обращенно перемеженный выходной сигнал из запоминающего устройства 95 декодируют декодером Рида-Соломона 110, дешифруют относительно псевдослучайных последовательностей блоком 115 и затем направляют через мультиплексор 120 к выходному процессору 125. Декодированный, демодулированный выходной сигнал от процессора 125 обрабатывают схемами 130, 135 и 140.
В другом варианте осуществления демодулятор 10 (фиг. 4) и декодер 12 конфигурируют посредством сигнала управления для приема ПВВС-формата кабельного сигнала. В кабельном режиме ПВВС система АРУ демодулятора 10 использует выходной сигнал ограничителя КАМ через мультиплексор 40. Ограничитель КАМ конфигурируют либо для 64-точечной, либо 256-точечной совокупности символов в зависимости от входного сигнала в демодулятор 10. Полученные таким образом данные, восстановленные выбранной конфигурацией ограничителя на выходе мультиплексора 40, дифференциально декодируют блоком 45 и направляют к мультиплексору 65 декодера 12.
Декодированный выходной сигнал блока 45 направляют через мультиплексор 65 к преобразователю символов в байты 70. Выходной сигнал преобразователя 70 обращенно перемежают сигналами блоков 75, 80, 90 и 95, которые конфигурируют, например, для функции обращенного перемежителя Форни. Обращенно перемеженный выходной сигнал из запоминающего устройства 95 декодируют декодером Рида-Соломона 110, дешифруют относительно псевдослучайных последовательностей блоком 115 и направляют через мультиплексор 120 к выходному процессору 125. Декодированный, демодулированный выходной сигнал от процессора 125 обрабатывают схемами 130, 135 и 140.
Функции демодулятора 10, декодера 12, средства для конфигурирования и выбора этих функций можно осуществить разными способами. Например, вместо использования мультиплексоров для выбора функций можно использовать конфигурируемую логическую схему. Либо для выбора отдельных выходных сигналов функции вместо использования мультиплексоров для выбора можно применить логическую схему трех буферизаций с тремя состояниями. Кроме этого, при применении принципов данного изобретения сами функции могут изменяться для обеспечения декодирования и демодуляции других форматов входного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛОВ, КОДИРОВАННЫХ В РАЗНЫХ ФОРМАТАХ | 1996 |
|
RU2171548C2 |
| ПАРАЛЛЕЛЬНОЕ ДЕКОДИРОВАНИЕ ПОТОКОВ ПЕРЕМЕЖАЮЩИХСЯ ДАННЫХ С ПОМОЩЬЮ ДЕКОДЕРА ЭГПИ | 1997 |
|
RU2215375C2 |
| ВИДЕОДЕКОДЕР С ОБРАБОТКОЙ ПЕРЕМЕЖАЮЩИХСЯ ДАННЫХ | 1997 |
|
RU2204217C2 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЗВУКОВЫХ СООБЩЕНИЙ В ТЕЛЕВИЗИОННОЙ СИСТЕМЕ | 1995 |
|
RU2163058C2 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ ПРОГРАММЫ ПЕРЕДАЧ В РЕЖИМЕ УСЛОВНОГО ДОСТУПА ДЛЯ УСЛУГИ СПУТНИКОВОГО ТВ | 1995 |
|
RU2140133C1 |
| УСТРОЙСТВО И СПОСОБ ОРИЕНТАЦИИ АНТЕННЫ | 1995 |
|
RU2204186C2 |
| СПОСОБ ПЕРЕДАЧИ ПРОГРАММНОЙ ИНФОРМАЦИИ ПО СИСТЕМЕ, ВКЛЮЧАЮЩЕЙ ГРУППУ КАНАЛОВ ПЕРЕДАЧИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, УСТРОЙСТВО ДЛЯ ПРИЕМА СЖАТЫХ АУДИО/ВИДЕО ПАКЕТНЫХ СИГНАЛОВ И СПОСОБ ЕГО РАБОТЫ | 1995 |
|
RU2159015C2 |
| СИСТЕМА ДИСПЛЕЯ | 1991 |
|
RU2119187C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ СИСТЕМЫ ЦИФРОВОГО ТЕЛЕВИДЕНИЯ | 1995 |
|
RU2146855C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ | 1995 |
|
RU2217847C2 |
Устройство относится к области цифровой обработки сигнала и, более конкретно, к демодуляции и декодированию видеосигналов, кодированных в соответствии с разными стандартами для спутниковой или наземной передачи. Технический результат - расширение функциональных возможностей путем обеспечения обработки разных типов функции демодуляции и декодирования. Устройство содержит адаптивный демодулятор и адаптивный декодер для обеспечения демодулированных и декодированных выходных данных от видеосигнала, кодированного для спутниковой, наземной или кабельной передачи. Демодулятор восстанавливает демодулированные выходные данные с помощью адаптивной схемы восстановления синхронизации и адаптивной схемы восстановления несущей, которая содержит выбираемый ограничитель. Кроме этого, схема автоматической регулировки усиления в демодуляторе обеспечивает выходной сигнал регулирования коэффициента усиления как функции разности между сигналами, полученными до и после ограничителя. Демодулятор может также содержать детектор качества сигнала, который использует сигналы схемы восстановления несущей для обеспечения оценки ошибки в демодулированных выходных данных. Детектор производит декодированный алгоритмом Витерби выходной сигнал из демодулированных выходных данных с помощью выбираемого декодера Витерби скорости передачи кода. 3 с. и 15 з.п. ф-лы, 2 табл., 6 ил.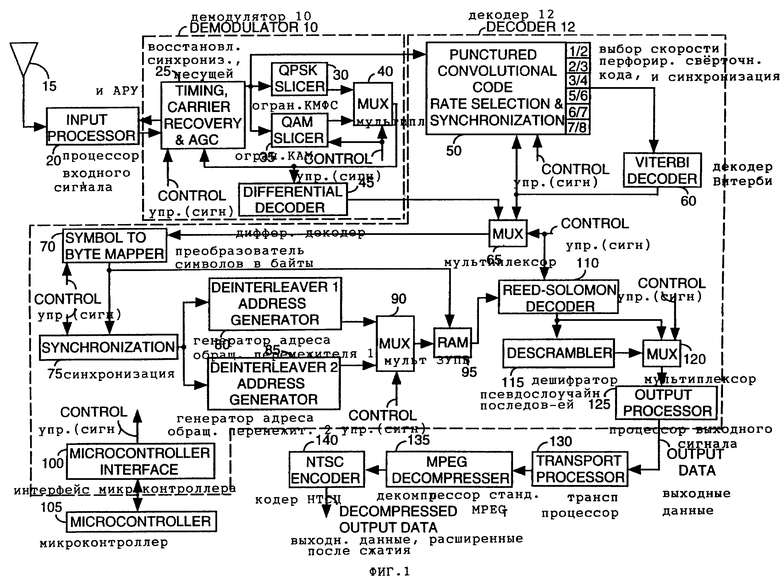
| US 5386239 A, 31.01.1995 | |||
| АДАПТИВНЫЙ ДЕМОДУЛЯТОР МНОГОПОЗИЦИОННЫХ СИГНАЛОВ | 1989 |
|
RU2022483C1 |
| US 5233629 A, 03.08.1993 | |||
| US 5235424 A, 10.08.1993 | |||
| US 5268761 A, 23.II.1993 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
