Настоящая заявка на патент касается заявки на патент США c регистрационным номером RСА 87.228, под названием "Устройство и способ ориентации приемной антенны с использованием звукового тона", зарегистрированной одновременно с настоящей заявкой на имя тех же заявителей.
Настоящее изобретение касается устройства и способа ориентации антенны типа спутниковой приемной антенны.
Приемную антенну нужно ориентировать относительно источника передаваемых сигналов для оптимального приема сигналов. Например, в случае спутниковой телевизионной системы это означает точное направление оси параболической антенны так, чтобы на экране связанного с ней телевизионного приемника отображалось оптимальное изображение.
Процедуру ориентации антенны можно облегчить с помощью использования устройства, которое измеряет параметр принимаемого антенной сигнала и которое вырабатывает сигнал, показывающий величину параметра при движении антенны. Ориентацию антенны можно облегчить, например, используя измеритель уровня сигнала или другой измерительный прибор, который временно подсоединяют к приемной антенне для измерения амплитуды принимаемого сигнала непосредственно на антенне.
Известен также способ обеспечения устройства измерения параметра внутри самого приемного устройства для того, чтобы исключить необходимость в дополнительном измерительном приборе. Для обеспечения видимого или слышимого выходного сигнала, который контролирует пользователь при ручном перемещении антенны, можно использовать параметр, отображающий сигнал. Полагают, что антенна сориентирована, когда характеристика выходного сигнала, такая как длина отображаемой на дисплее полосы или частота звукового тона, имеет максимальное или минимальное значение, в зависимости от характера измеряемого параметра. Например, в патенте США 4893288 под названием "Звуковое устройство ориентации антенны", выданном Герхарду Мейеру и Вейту Амбрустеру 9 января 1990 г., описано устройство регулирования спутниковой приемной антенны, которое вырабатывает слышимый выходной сигнал, имеющий частоту, которая обратно пропорциональна амплитуде сигнала промежуточной частоты, полученного из принятого сигнала. Частота слышимого выходного сигнала высокая, когда антенна не сориентирована, а амплитуда сигнала промежуточной частоты низкая. Частота слышимого выходного сигнала уменьшается, когда антенна приводится в ориентированное положение, а амплитуда ПЧ-сигнала растет.
Можно осуществлять контроль параметров, отличающихся от уровня сигнала. Например, патент США 5287115, выданный Уокеру и др., касается устройства ориентации спутниковой приемной антенны, которая принимает сигналы, имеющие информацию, закодированную в цифровой форме, и которая осуществляет контроль частоты появления ошибок по битам (ЧПОБ) информации, закодированной в цифровой форме. Антенну перемещают из начального положения до тех пор, пока параметр ЧПОБ не окажется минимальным. Устройство ориентации антенны Уокера является автоматическим устройством, в котором используется двигатель для перемещения антенны.
Устройство ориентации антенны описанного выше типа требует принятия решения, когда параметр имеет минимальное или максимальное значение, с целью ориентирования антенны на оптимальный прием. В случае устройства ручной ориентации антенны пользователь может столкнуться с трудностью принятия такого решения. В случае автоматического устройства ориентации антенны, для исключения ошибок в принятии решений может потребоваться сложный алгоритм ориентации антенны.
Настоящее изобретение касается устройства ориентации антенны и связанного с ним способа, которые не требуют определения, имеет ли полученный в результате измерения параметр максимальное или минимальное значение. Вместо этого изобретение опирается на определение, показывает ли полученный в результате измерения параметр приемлемый прием, и определение диапазона положений антенны, в которых полученный в результате измерений параметр показывает приемлемый прием. После определения диапазона антенну устанавливают в середине этого диапазона, что дает оптимальный или близкий к оптимальному прием. Изобретение особенно хорошо подходит для ориентации антенны в системе, в которой передаваемые сигналы содержат по меньшей мере некоторую часть информации, закодированную в цифровой форме. В такой системе устройство в соответствии с аспектом изобретения включает в себя средство, предназначенное для определения, можно ли корректировать ошибки в закодированной цифровым способом информации, т.е. средство для обнаружения условия цифровой ошибки упомянутой закодированной в цифровой форме составляющей информации и вырабатывания сигнала, указывающего, возможна ли коррекция цифровых ошибок, и средство, реагирующее на определение состояния ошибки, предназначенное для вырабатывания сигнала индикации ориентации антенны, имеющего первое состояние, когда исправление ошибок возможно, и второе состояние, когда исправление ошибок невозможно.
Связанный способ в соответствии с другим аспектом изобретения включает в себя первоначальный этап осуществления контроля чувствительного к состоянию ошибки сигнала индикации ориентации антенны при перемещении антенны, с целью определения когда осуществляется переход между упомянутыми первым и вторым состояниями, и благодаря этому границы диапазона положений антенны, на протяжении которого возможно исправление ошибок, т.е. средство, чувствительное к переходам упомянутого сигнала индикации коррекции цифровой ошибки, для определения границ области положений антенны, в которой возможна коррекция цифровых ошибок.
После этого антенну перемещают так, чтобы она находилась в среднем положении между границами, при этом упомянутую антенну перемещают вручную, а упомянутый этап определения упомянутых первого и второго положений включает в себя контроль сигнала ручной ориентации антенны, вырабатываемого приемным устройством в ответ на упомянутый сигнал индикации условия ошибки и имеющего первую и вторую характеристики, соответствующие упомянутым первому и второму состояниям упомянутого сигнала индикации условия ошибки. Эти и другие аспекты изобретения будут описаны со ссылкой на прилагаемые чертежи.
На чертежах:
Фиг. 1 представляет схематический чертеж механических средств спутниковой телевизионной приемной системы.
Фиг. 1а представляет вид сверху антенного устройства, показанного на фиг. 1.
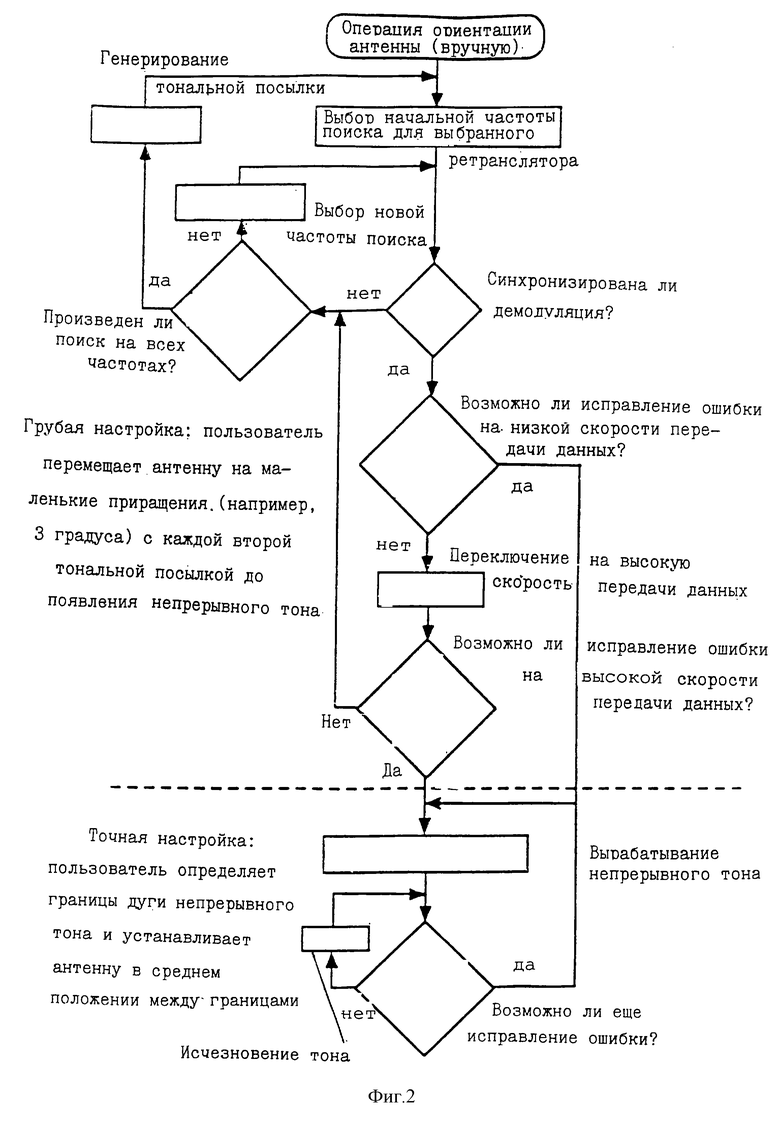
Фиг. 2 представляет блок-схему, полезную для понимания как способа, так и устройства ручной ориентации показанного на фиг. 1 и 1а антенного устройства, в соответствии с соответственными аспектами настоящего изобретения.
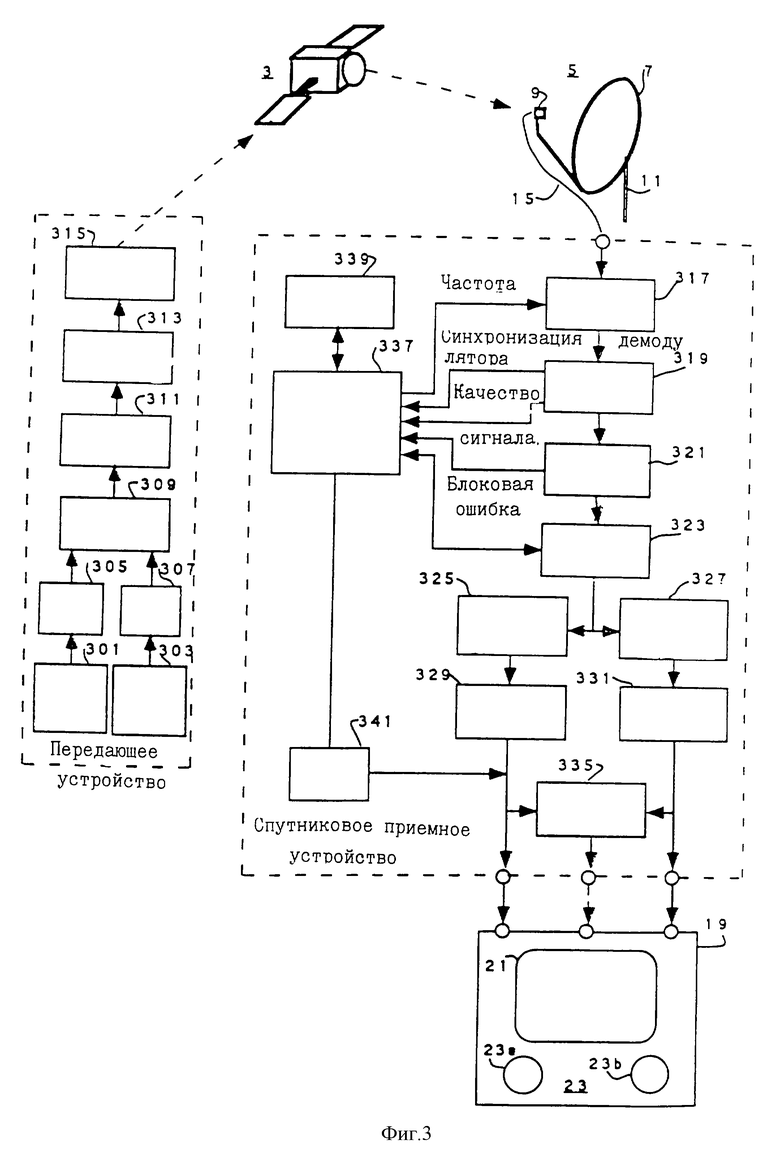
Фиг. 3 представляет блок-схему электронных компонентов показанной на фиг. 1 спутниковой телевизионной системы, полезную для понимания аппаратуры, предназначенной для ручной ориентации показанного на фиг. 1 и 1а антенного устройства, в соответствии с настоящим изобретением,
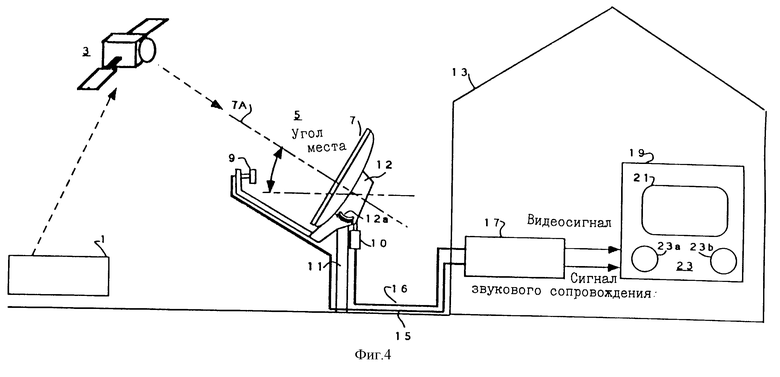
Фиг. 4 представляет схематический чертеж механических средств спутниковой телевизионной приемной системы, аналогичный показанному на фиг. 1 чертежу, за исключением того, что добавлен привод для автоматической ориентации антенного устройства.
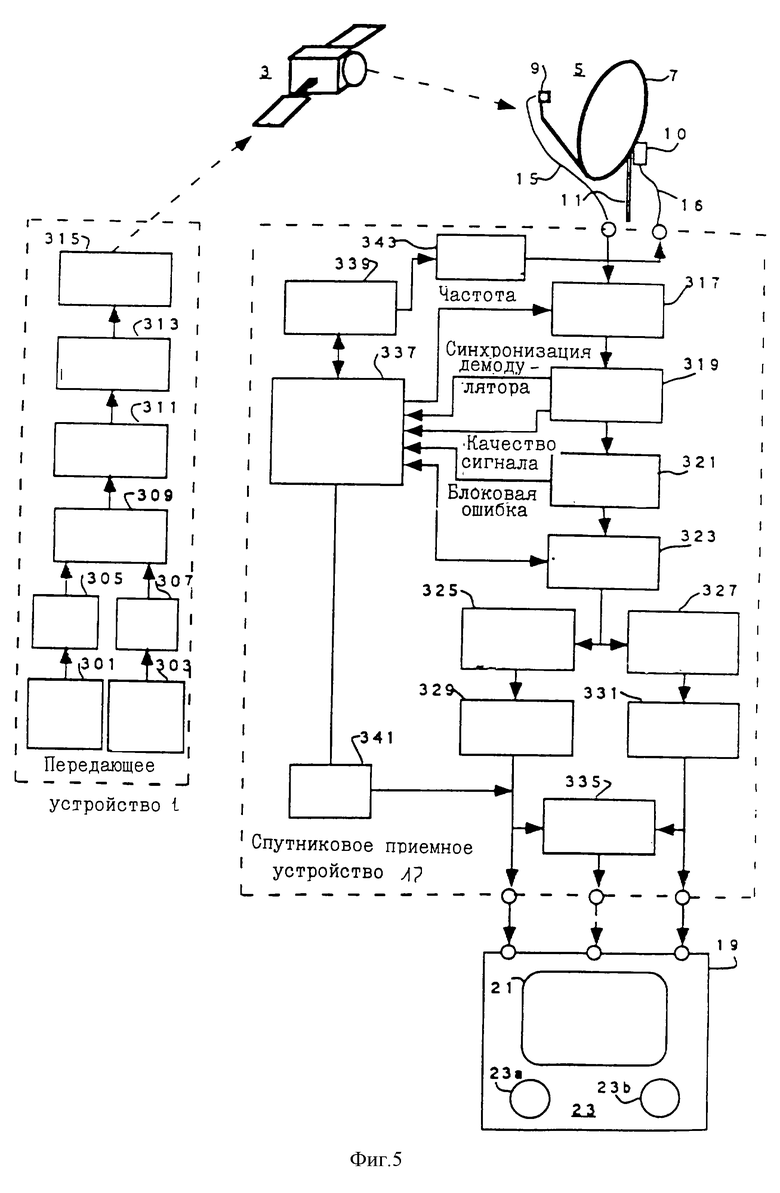
Фиг. 5 представляет блок-схему электронных компонентов показанной на фиг. 4 спутниковой телевизионной системы, полезную для понимания устройства автоматической ориентации показанного на фиг. 4 антенного устройства, в соответствии с настоящим изобретением.
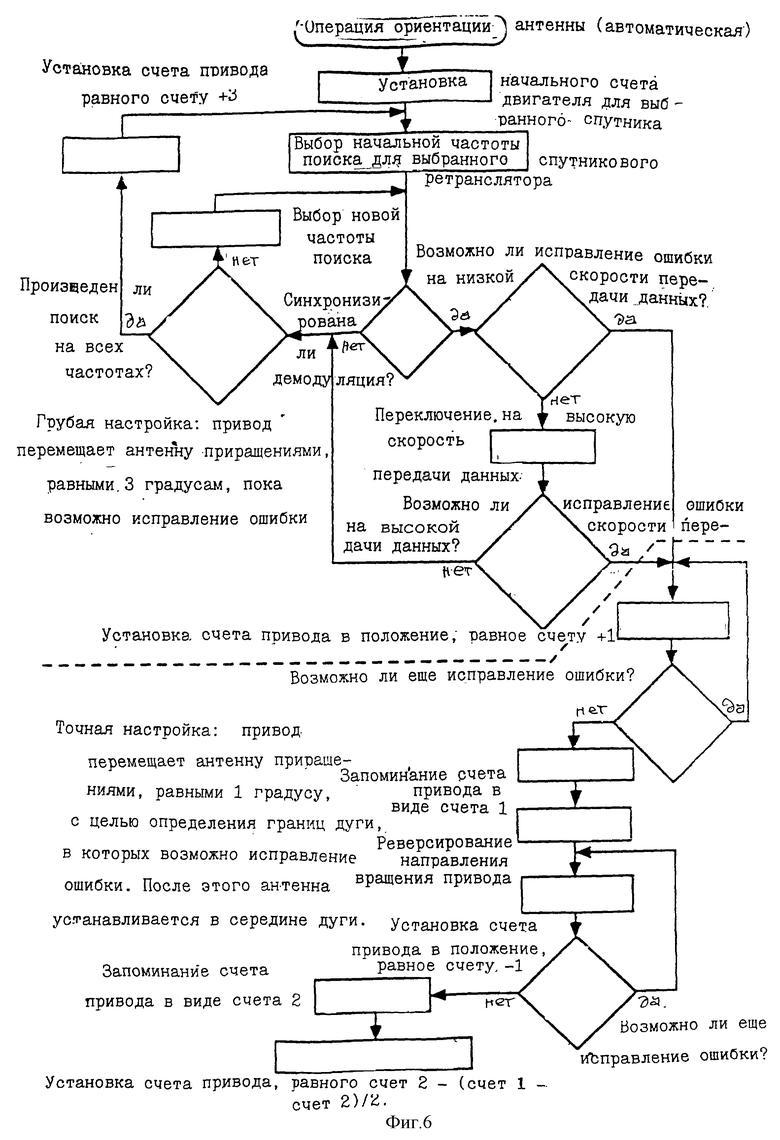
Фиг. 6 представляет блок-схему, полезную для понимания как показанного на фиг. 4 и 5 устройства для автоматического ориентирования антенного устройства, так и способа, посредством которого оно приводится в действие, в соответствии с соответственными положениями настоящего изобретения.
На разных чертежах изображенные одни и те же или подобные элементы обозначены одними и теми же ссылочными позициями.
В показанной на фиг. 1 спутниковой телевизионной системе передающая станция 1 передает телевизионные сигналы, включающие в себя составляющие видеосигнала и сигнала звукового сопровождения, на спутник 3, находящийся на геосинхронной околоземной орбите. Спутник 3 принимает телевизионные сигналы, передаваемые передающим устройством 1, и ретранслирует их по направлению к земле.
Спутник 3 имеет некоторое количество ретрансляторов, например 24, для приема и передачи телевизионной информации. Изобретение будет описано с помощью примера относительно цифровой спутниковой телевизионной системы, в которой телевизионная информация передается в уплотненной форме в соответствии с заранее заданным стандартом уплотнения цифровых сигналов типа МРEG (группа экспертов по движущимся изображениям) (ГЭДИ). МРEG является международным стандартом для кодированного представления движущихся изображений и связанной с ними информации звукового сопровождения, разработанным группой экспертов по движущимся изображениям. Цифровая информация модулируется на несущей частоте, которая в области передачи цифровой информации известна как модуляция QPSK (четырехпозиционная фазовая манипуляция) (ЧПФМ). Каждый ретранслятор осуществляет передачу на соответствующей несущей частоте и либо с высокой, либо с низкой скоростью передачи цифровой информации.
Телевизионные сигналы, передаваемые спутником 3, принимаются антенным устройством, или "установкой, предназначенной для размещения на открытом воздухе" 5. Антенное устройство 5 включает в себя параболическую антенну 7 и преобразователь частоты 9. Антенна 7 фокусирует передаваемые со спутника 3 телевизионные сигналы на преобразователь частоты 9, который преобразует частоты всех принимаемых телевизионных сигналов в соответственные более низкие частоты. Преобразователь частоты 9 называется "блоковым преобразователем", поскольку диапазон частот всех принимаемых телевизионных сигналов преобразуется в виде блока. Антенное устройство 5 смонтировано на мачте 11 с помощью регулируемого монтажного крепления 12. Хотя мачта 11 показана на некотором расстоянии от здания 13, в действительности ее можно прикреплять к зданию 13.
Телевизионные сигналы, вырабатываемые блоковым преобразователем 7, поступают по коаксиальному кабелю 15 на спутниковое приемное устройство 17, размещенное внутри здания 13. Спутниковое приемное устройство 17 иногда называют "установкой, предназначенной для размещения внутри помещения". Спутниковое приемное устройство 17 настраивает, демодулирует и выполняет другие обработки принятого телевизионного сигнала, как подробно будет описано в связи с фиг. 3, для вырабатывания видеосигналов и сигналов звукового сопровождения в формате (NTSC - НТСЦ (Национальный комитет по телевидению, США), PAL - ПАЛ (система цветного телевидения, ФРГ) или SEKAM - CEKAM (система цветного телевидения)), подходящем для обработки с помощью обычного телевизионного приемника 19, на который они поступают. Телевизионный приемник 19 вырабатывает на экране отображающего устройства 21 изображение в ответ на видеосигнал. Акустическая система 23 в ответ на сигнал звукового сопровождения вырабатывает слышимый выходной сигнал. Хотя на фиг. 1 показан только один звуковой канал, следует понимать, что на практике могут быть обеспечены один или больше дополнительные звуковые каналы, например, для стереофонического воспроизведения, как показано динамиками 23а и 23b. Динамики 23а и 23b могут быть расположены внутри телевизионного приемника 19, как показано, или могут находиться отдельно от телевизионного приемника 19.
Параболическую антенну 7 необходимо размещать так, чтобы она принимала телевизионные сигналы, передаваемые со спутника 3, для обеспечения оптимальных изображения и звуковых выходных сигналов. Спутник 3 находится на геосинхронной околоземной орбите над определенным участком на земле. Операция установки в определенное положение включает в себя точную ориентацию оси центральной линии 7А параболической антенны на точку местоположения спутника 3. Для этой цели требуется как наведение "по углу места", так и наведение "по азимуту". Как показано на фиг. 1, угол места антенны 7 представляет собой угол оси 7А относительно горизонта в вертикальной плоскости. Как показано на фиг. 1а, азимут представляет собой угол оси 7А относительно направления на географический север в горизонтальной плоскости. Монтажное крепление 12 можно регулировать как по углу места, так и по азимуту для осуществления ориентации антенны 7.
При установке антенного устройства 5 угол места можно регулировать с достаточной точностью путем установки угла места с помощью части транспортира 12а монтажного крепления 12, в соответствии с широтой места приема. После установки угла места азимут грубо устанавливают с помощью наведения антенного устройства прямо в направлении спутника 3 в соответствии с долготой места приема. Таблица, указывающая углы места и азимута для различных значений широты и долготы, может быть включена в руководство по эксплуатации для владельца, прилагаемое к спутниковому приемному устройству 17. Угол места можно устанавливать относительно точно, используя транспортир 12а, потому что мачту 11 легко устанавливать перпендикулярно горизонту, используя строительный уровень или отвес. Однако точно установить азимут значительно труднее, поскольку нельзя легко определить направление на географический север.
В целях упрощения операции ориентации по азимуту устройство ориентации антенны включено в спутниковое приемное устройство 17. В соответствии с изобретением устройство ориентации антенны чувствительно к состоянию ошибки принимаемого сигнала. Детали этого устройства будут описаны со ссылкой на фиг. 2 и 3. Пока достаточно понять, что когда приводят в действие устройство слуховой ориентации, оно вызывает вырабатывание динамиками 23а и 23b непрерывного звукового тона фиксированной частоты и интенсивности только тогда, когда положение по азимуту находится в пределах ограниченного диапазона, например в пределах пяти градусов, в котором возможна коррекция ошибок в дискретно кодированной информации принятого сигнала. Непрерывный тон больше не генерируется (то есть он умолкает), когда положение по азимуту оказывается за пределами ограниченного диапазона.
Устройство слуховой ориентации можно также заставлять вырабатывать тональную посылку или звуковой сигнал каждый раз, когда блок настройки и демодулятора спутникового приемного устройства 17 завершает алгоритм поиска без обнаружения частоты настройки и скорости передачи данных для выбранного спутникового ретранслятора, на которых возможна коррекция ошибок в дискретно кодированной информации принятого сигнала. Алгоритм поиска необходим, потому что хотя несущая частота для каждого ретранслятора известна, блоковый преобразователь 9 имеет тенденцию вносить частотную ошибку, например, порядка нескольких мегагерц, и скорость передачи данных может быть заранее неизвестной.
Теперь будет описан способ ориентации антенны для получения оптимального или близкого к оптимальному приема в соответствии с одним аспектом изобретения. Обращаясь к показанной на фиг. 2 блок-схеме, отметим, что несмотря на то, что она главным образом касается работы показанной на фиг. 3 электронной структуры спутникового приемного устройства 17, она будет полезна во время последующего описания.
Операция ориентации антенны начинается пользователем, например, посредством выбора соответствующей позиции из меню, которое заставляют отобразиться на экране индикатора 21 телевизионного приемного устройства 19 в ответ на видеосигнал, вырабатываемый спутниковым приемным устройством 17. После этого блок настройки и демодулятора спутникового приемного устройства 17 вызывает инициирование алгоритма поиска для идентификации настройки по частоте и скорости передачи данных конкретного спутникового ретранслятора. В течение алгоритма поиска производится попытка настройки на ряде частот, окружающих номинальную частоту выбранного ретранслятора. Надлежащая настройка отмечается тогда, когда сигнал "синхронизации демодулятора", вырабатываемый блоком настройки и демодулятором, как будет описано со ссылкой на фиг. 3, имеет логическое состояние "1".
Если настройка произведена правильно, состояние ошибки информации, закодированной в цифровой форме, содержащейся в принятом сигнале, проверяется на двух возможных скоростях передачи данных с целью определения, возможно ли исправление ошибки. Если и настройка неправильная, и невозможно исправление ошибки на конкретной частоте поиска, условия настройки и коррекции ошибки проверяются на следующей частоте поиска. Этот процесс продолжается до тех пор, пока не будут оценены все частоты поиска. На этой стадии, если не были возможны ни надлежащая настройка, ни коррекция ошибки ни на какой частоте поиска, производится тональная посылка или звуковой сигнал для того, чтобы показать пользователю, что антенна 7 еще не находится в ограниченном диапазоне по азимуту, необходимом для хорошего приема. С другой стороны, если возможны и надлежащая настройка, и коррекция ошибки на какой-то из частот поиска, устройство ориентации вызывает вырабатывание непрерывного тона для того, чтобы показать пользователю, что антенна 7 находится в пределах ограниченного азимутального диапазона, необходимого для хорошего приема.
В инструкции по эксплуатации, прилагаемой к спутниковому приемному устройству 17, пользователю дается инструкция, что при появлении звукового сигнала антенное устройство 5 необходимо поворачивать вокруг мачты 11 путем небольших приращений, например, на три градуса. В соответствии с пожеланием пользователю дается указание поворачивать антенное устройство 5 после каждого второго звукового сигнала. Это позволит завершить алгоритм настройки до того, как антенное устройство 5 переместится снова. (Например, полный цикл алгоритма настройки, при котором исследованы все частоты поиска, может занимать от трех до пяти секунд). Пользователю дается указание повторяющимся образом поворачивать антенное устройство 5 маленькими (три градуса) приращениями (после каждого второго звукового сигнала) до тех пор, пока не возникнет непрерывный тон. Вырабатывание непрерывного тона означает окончание части грубого наведении процесса ориентации и начало части точного наведения.
Пользователю дается инструкция, что после того, как появится непрерывный тон, необходимо продолжать поворачивать антенное устройство 5 до того момента, пока вновь не прекратится непрерывный тон (то есть, до тех пор, пока тон не стихнет), и затем отметить соответственное положение азимута антенны как первое граничное положение. Пользователя инструктируют после этого изменить направление вращения на противоположное и поворачивать антенное устройство 5 в новом направлении мимо первой границы. Это снова вызовет генерирование непрерывного тона. Пользователь должен в соответствии с инструкцией продолжать поворачивать антенное устройство 5 до тех пор, пока опять не смолкнет непрерывный тон, и отметить соответственное положение антенны как второе граничное положение.
Пользователю дается инструкция, что после определения двух граничных положений следует установить угол по азимуту на оптимальный или близкий к оптимальному прием путем поворота антенного устройства 5 до его среднего положения между двумя граничными положениями. Обнаружено, что процедура установки в среднее положение обеспечивает очень хороший прием. После этого режим работы по ориентации антенны завершается, например, посредством оставления меню ориентации антенны отображенным на экране 21 телевизионного приемного устройства 19.
Устройства слуховой ориентации антенны, входящие в состав спутникового приемного устройства 17, которое производит звуковые тона, используемые в описанном выше способе ориентации, теперь будут описаны со ссылкой на фиг. 3.
Как показано на фиг. 3, передающее устройство 1 включает в себя источник 301 аналоговых видеосигналов и источник 303 аналоговых сигналов звукового сопровождения и аналого-цифровые преобразователи (АЦП) 305 и 307, предназначенные для преобразования аналоговых сигналов в соответствующие цифровые сигналы. Кодирующее устройство 309 уплотняет и кодирует цифровые видео и звуковые сигналы в соответствии с заранее выбранным стандартом типа ГЭДИ. Кодированный сигнал имеет форму серий или потока пакетов, соответствующих соответственным видео и звуковым составляющим. Тип пакета идентифицируется с помощью кода заголовка. К потоку данных можно также добавлять пакеты, соответствующие управляющим и другим данным.
Кодирующее устройство прямого исправления ошибок (ПИО) - средство для обнаружения условия ошибки, закодированной в цифровой форме составляющей информации 321, добавляет поправочные данные к пакетам, вырабатываемым кодирующим устройством 309 для того, чтобы осуществлять исправление ошибок, обусловленных возможным шумом в канале передачи к спутниковому приемному устройству. Можно успешно использовать известные типы кодирования прямого исправления ошибок Вайтерби и Рида-Соломона. Модулятор ЧПФМ (четырехпозиционной фазовой манипуляции) 313 модулирует несущую выходным сигналом кодирующего устройства ПИО 311. Модулированная несущая передается с помощью так называемого блока "линии связи Земля - летающий аппарат" 315 на спутник 3.
Спутниковое приемное устройство 17 включает в себя настроечное устройство 317 с гетеродином и смесителем (не показаны), предназначенное для выбора соответствующего сигнала несущей из множества сигналов, принимаемых с антенного устройства 5 и для преобразования частоты выбранной несущей в более низкую частоту для производства сигнала промежуточной частоты (ПЧ). Сигнал ПЧ демодулируется демодулятором ЧПФМ 319 с целью получения демодулированного цифрового сигнала. Декодирующее устройство ПИО 321 декодирует данные исправления ошибок, содержащиеся в демодулированном цифровом сигнале" и, на основании данных исправления ошибок, корректирует демодулированные пакеты, представляющие видеосигнал, сигнал звукового сопровождения и другую информацию. Например, декодирующее устройство ПИО 321 может работать в соответствии с алгоритмом исправления ошибок Вайтерби и Рида-Соломона, где в кодирующем устройстве ПИО 311 передающего устройства 1 используется кодирование исправления ошибок Вайтерби и Рида-Соломона. Настроечное устройство 317, демодулятор ЧПФМ 319 и декодирующее устройство ПИО могут быть включены в блок, имеющийся у фирмы "Хьюгес Нетвок системз", г. Джементаун, штат Мэриленд или фирмы "Комстрем Корп.", Сан-Диего, штат Калифорния.
Передаточный блок 323 представляет демодулятор, который трассирует видеопакеты сигнала с откорректированной ошибкой на декодер видеосигнала 325, а звуковые пакеты на декодер сигнала звукового сопровождения 327 по шине данных в соответствии с информацией заголовка, содержащейся в пакетах. Декодер видеосигналов 325 декодирует и разуплотняет пакеты видеосигналов, а полученный в результате цифровой видеосигнал преобразуется в аналоговый видеосигнал в полосе частот модулирующих сигналов с помощью цифроаналогового преобразователя (ЦАП) 329. Декодер сигналов звукового сопровождения 327 декодирует и разуплотняет пакеты звуковых сигналов, а полученный в результате цифровой сигнал звукового сопровождения преобразуется в аналоговый сигнал звукового сопровождения в полосе частот модулирующих сигналов с помощью ЦАП 331.
Аналоговые видеосигнал и сигнал звукового сопровождения в полосе частот модулирующих сигналов поступают на телевизионное приемное устройство через соответствующие соединители в полосе частот модулирующих сигналов. Аналоговые видеосигналы и сигналы звукового сопровождения в полосе частот модулирующих сигналов поступают также на модулятор 335, который модулирует аналоговый сигнал на несущей частоте в соответствии с обычным телевизионным стандартом типа НТСЦ, ПАЛ или СЕКАМ для подачи на телевизионный приемник без устройств ввода данных в полосе частот модулирующих сигналов.
Микропроцессор 337 обеспечивает управляющие данные выбора частоты гетеродина для настроечного устройства 317 и принимает данные "синхронизации демодулятора" и "качества сигнала" с демодулятора 319 и данные "блоковой ошибки" с декодирующего устройства ПИО 321. Микропроцессор 337, кроме того, работает в интерактивном режиме с передаточным блоком 323 с целью воздействия на выбор маршрута пакетов данных. Для запоминания управляющей информации используется постоянное запоминающее устройство (ПЗУ) 339, связанное с микропроцессором 335. ПЗУ 339 благоприятно используется также для генерирования описанных выше тона и тональных посылок, предназначенных для ориентации антенного устройства 5, как будет подробно описано ниже.
Демодулятор ЧПФМ 319 включает в себя систему фазовой автоматической подстройки частоты (не показана), предназначенную для синхронизации его работы на частоту сигнала ПЧ с целью демодуляции цифровых данных, которыми модулирован сигнал ПЧ. Поскольку имеется настройка на несущую, демодулятор 319 может демодулировать ПЧ - сигнал независимо от количества ошибок, которые содержатся в цифровых данных. Демодулятор 319 вырабатывает одноразрядный сигнал "синхронизации демодулятора", например, имеющий логическое состояние "1", когда его операция демодуляции завершается. Демодулятор 319 вырабатывает также сигнал "качества сигнала", соответствующий отношению сигнала к шуму принимаемого сигнала.
Декодирующее устройство ПИО 321 может исправлять только конкретное количество ошибок на один блок данных. Например, декодирующее устройство ПИО 321 способно исправлять ошибки только восьми байтов в пакете из 146 байтов, 16 байтов из которых используются для кодирования коррекции ошибок. Декодирующее устройство ПИО 321 генерирует одноразрядный сигнал "блоковой ошибки", показывающий, больше или меньше порогового количество ошибок в данном блоке, и, следовательно, возможно ли исправление ошибок. Сигнал "блоковой ошибки" имеет первое логическое состояние, например "0", когда исправление ошибки возможно, и второе логическое состояние, например "1", когда исправление ошибки невозможно. Сигнал "блоковой ошибки" можно изменять с каждым блоком цифровых данных.
Теперь будет описан способ, каким реагирует микропроцессор 337 на сигналы "синхронизации демодулятора" и "блоковой' ошибки" во время режима работы по ориентации антенны. Обратимся к показанной на фиг. 2 блок-схеме, представляющей подпрограмму ориентации антенны, запомненную в участке памяти микропроцессора 337, которая опять будет нам полезна. После инициации режима работы по ориентации антенны и выбора для настроечного устройства заранее заданной несущей частоты микропроцессор 337 осуществляет текущий контроль за состоянием сигнала "синхронизация демодулятора".
Если сигнал "синхронизации демодулятора" имеет состояние логического "0", показывающее, что демодуляция не может быть осуществлена на текущей частоте поиска, микропроцессор 337 либо дает команду выбрать следующую частоту поиска, либо, если поиск был проведен уже на всех частотах поиска, дает команду генерировать тональную посылку или звуковой сигнал. Если сигнал "синхронизации демодулятора" имеет состояние логической "1", показывающее, что демодулятор 319 успешно завершил свою операцию демодуляции, проверяется сигнал "блоковой ошибки" с целью определения, возможно ли исправление ошибки или нет.
Вначале проверяется состояние ошибки на низкой скорости передачи данных. Если исправление ошибки на низкой скорости передачи данных невозможно, проверяется состояние ошибки на высокой скорости передачи данных. Для каждой скорости передачи данных микропроцессор 337 повторяющимся образом осуществляет выборку сигнала "блоковой ошибки", потому что сигнал "блоковой ошибки" может меняться с каждым блоком цифровых данных. Если сигнал "блоковой ошибки" имеет состояние логической "1" для данного количества выборок для обеих скоростей передачи данных, показывая, что исправление ошибок невозможно, микропроцессор 337 либо дает команду выбрать следующую частоту поиска, либо, если все частоты поиска уже исследованы, дает команду на вырабатывание тональной посылки или звукового сигнала. С другой стороны, если сигнал "блоковой ошибки" имеет состояние логического "0" для данного количества выборок, показывая, что исправление ошибки возможно, микропроцессор 339 дает команду на генерирование непрерывного тона.
Звуковой непрерывный тон и тональную посылку может генерировать специализированная схема, например, включающая в себя генератор, подсоединенный к выходу звукового ДАЛ 331. Однако такая специализированная схема увеличит сложность и, следовательно, стоимость спутникового приемного устройства 17. Чтобы избежать такой сложности и увеличенной стоимости, показанный на фиг. 3 вариант осуществления изобретения выполняет благоприятное двойное использование конструкции, которая уже имеется. Теперь будет описан способ, которым генерируются звуковые тона в показанном на фиг. 3 варианте осуществления.
ПЗУ 339 запоминает в конкретной ячейке памяти цифровые данные, закодированные для представления звукового тона. Желательно, чтобы данные тона запоминались в виде пакета в такой же сжатой форме, например, в соответствии со звуковым стандартом ГЭДИ, как и передаваемые звуковые пакеты. Для производства непрерывного звукового тона микропроцессор 337 вызывает считывание пакета данных тона из ячейки памяти данных тона ПЗУ 339 и передачу в ячейку памяти звуковых данных запоминающего устройства с произвольной выборкой (ЗУПВ, не показано), связанного с передаточным блоком 323. ЗУПВ обычно используется для временного запоминания пакетов потока данных передаваемого сигнала в соответственных ячейках памяти в соответствии с типом информации, которую они представляют. Звуковая ячейка памяти ЗУПВ передаточного блока, в которой запоминается пакет данных тона, является такой же ячейкой памяти, в которой запоминаются передаваемые звуковые пакеты. Во время этого процесса микропроцессор 337 вызывает отбрасывание передаваемых пакетов звуковых данных путем не направления их в звуковую ячейку памяти ЗУПВ.
Пакет данных тона, запомненный в ЗУПВ, передается по шине данных в декодер звукового сигнала 327 таким же образом, как и передаваемые пакеты звуковых данных. Пакет данных тона разуплотняется с помощью декодера звукового сигнала 327 также, как и любой передаваемый пакет звукового сопровождения. Полученный в результате разуплотненный цифровой звуковой сигнал преобразуется цифроаналоговым преобразователем 331 в аналоговый сигнал. Аналоговый сигнал подается на динамики 23а и 23b, которые производят непрерывный звуковой тон.
Для генерирования тональной посылки или звукового сигнала микропроцессор 337 вызывает передачу пакета данных тона на декодер видеосигналов 327 таким же способом, как и описано выше, но вызывает приглушение звукового ответа, за исключением короткого промежутка времени, посредством обеспечения подачи сигнала управления молчанием на декодер звукового сигнала 327.
Вышеописанный процесс генерирования слышимого тона и тональных посылок можно инициировать в начале операции ориентации антенны. В этом случае микропроцессор 337 вырабатывает непрерывный сигнал управления молчанием до тех пор, пока не потребуется либо генерирование непрерывного тона, либо тональной посылки.
В качестве альтернативы, тональная посылка и непрерывный тон можно генерировать следующим образом. Чтобы произвести тональную посылку, микропроцессор 337 вызывает считывание пакета данных тона из ячейки памяти данных тона в ПЗУ 339 и передачу на декодер 327 через передаточный блок 322 описанным выше способом. Чтобы генерировать непрерывный тон, микропроцессор 337 циклически вызывает считывание пакета данных тона из ячейки памяти данных тона ПЗУ 339 и передачу на декодер 327. По существу, это создает почти непрерывные последовательности близко размещенных тональных посылок.
Как упоминалось выше, демодулятор 319 вырабатывает сигнал "качества сигнала", который показывает отношение сигнала к шуму (С/Ш) принятого сигнала. Сигнал отношения С/Ш имеет форму цифровых данных и подается на микропроцессор 337, который преобразует их в графические управляющие сигналы, пригодные для отображения графиков качества сигнала на экране 21 телевизионного приемника 19. Графические управляющие сигналы подаются на блок воспроизведения дополнительной информации на экране телевизора (ВДИ) 341, которые вызывают подачу представляющих графики видеосигналов на телевизионный приемник 19. Графики качества сигнала могут иметь форму треугольника, который увеличивается в горизонтальном направлении, когда качество сигнала улучшается. Графики могут также иметь форму числа, которое увеличивается при улучшении качества сигнала. Графики качества сигнала могут помогать пользователю в оптимизации настройки антенны как по углу места, так и по азимуту. Форму графического представления качества сигнала может выбирать пользователь с помощью упомянутого ранее меню ориентации антенны.
Устройство и способ использования состояния ошибки принимаемого сигнала в соответствии с изобретением до сих пор описывались в отношении антенны 7, ориентируемой вручную. Однако состояние ошибки можно также использовать в соответствии с другим аспектом изобретения в устройстве и способе для антенны 7 с автоматической ориентацией. Такие устройство и способ автоматической ориентации антенны могут устранить необходимость ручной ориентации и особенно полезны, когда спутниковое приемное устройство 17 предназначено для приема сигналов с нескольких различных спутников.
Устройство и способ автоматической ориентации антенны будут описаны относительно фиг. 4, 5 и 6. Фиг. 4, 5 и 6 в общем аналогичны фиг. 1, 2 и 3 соответственно, за исключением того, что проведены модификации, касающиеся устройства и поиска автоматической ориентации. Показанный на фиг. 1а вид сверху антенного устройства 5, изображенного на фиг. 1, в равной степени применим и к антенному устройству 5, изображенному на фиг. 4.
Как показано на фиг. 4, привод 10 подсоединен между монтажным креплением 12 и мачтой 11 для вращения антенного устройства 5 относительно мачты 11 так, чтобы регулировать положение антенного устройства 5 по азимуту. Между приводом 10 и спутниковым приемным устройством 17 подсоединен кабель управления 16.
Как показано на фиг. 5, кабель управления приводом 16 подсоединен к устройству управления приводом 343, включенному в состав спутникового приемного устройства 17. Устройство управления приводом 343 принимает сигналы управления приводом с микропроцессора 337 для управления положением антенны 7 по азимуту. Привод 10 в соответствии с желанием является шаговым двигателем, и каждый шаг привода 10 может соответствовать, например, одному градусу поворота антенны 7. Микропроцессор 337 включает в себя регистр (не показан), предназначенный для запоминания счета, соответствующего шаговому положению привода 10. Этот счет в последующем описании операции автоматической ориентации будет называться "счетом привода".
Операция автоматической ориентации антенны начинается пользователем, например, вручную во время установки или автоматически, при выборе нового спутника. Угол места антенны 7 устанавливается до установки азимута. Для автоматического установления угла места антенны 7 обеспечен другой привод и связанный с ним блок управления приводом, хотя и не показаны. Справочная таблица угла места, запомненная в ПЗУ 339, содержит информацию управления для привода угла места в соответствии с выбранным спутником и широтой местоположения приема. Информация управления приводом угла места считывается микропроцессором 337 и подается в блок управления приводом угла места с целью установления угла места антенны 7.
После этого, как показано на фиг. 6, операция автоматической ориентации антенны по азимуту начинается с установления первоначального "счета привода" для выбранного спутника. Начальный "счет привода" зависит от выбранного спутника и долготы места приема и содержится в справочной таблице азимута, запомненной в ПЗУ 339. После этого начинается режим выполнения ориентации по направлению путем инициации аналогичного алгоритма поиска настроечного устройства, предназначенного для отыскания соответственной частоты настройки, на которой возможна демодуляция, как было описано прежде в отношении блок-схемы, изображенной на фиг. 2, в связи с процедурой ручной ориентации антенны. Если сигнал "синхронизации демодулятора" имеет состояние логического "0", показывающее, что на данной частоте поиска демодуляция не может быть достигнута, микропроцессор 337 либо вызывает выбор следующей частоты поиска, либо, если все частоты поиска уже исследованы, заставляет привод 10 перемещать антенну 7 на небольшое приращение, например на три градуса, путем установления соответствующим образом "счета привода". Если сигнал "синхронизации демодулятора" имеет состояние логической "1", показывающее, что демодулятор 319 удовлетворительно завершил свою операцию демодуляции, проверяется сигнал "блоковой ошибки" для определения, возможно ли или нет исправление ошибок.
Состояние ошибки проверяется таким же способом, как описано в связи с блок-схемой на фиг. 2, с помощью выборки сигнала "блоковой ошибки". Если сигнал "блоковой ошибки" имеет состояние логической "1" для данного количества выборок для обеих скоростей передачи информации, указывая, что исправление ошибки невозможно, микропроцессор 337 либо вызывает выбор следующей частоты поиска, либо, если все частоты поиска исследованы, заставляет двигатель 10 переместить антенну на небольшое приращение, например на три градуса, устанавливая соответствующим образом "счет привода". С другой стороны, если сигнал "блоковой ошибки" имеет состояние логического "0" для данного количества выборок, показывая, что исправление ошибки возможно, микропроцессор 337 вызывает инициирование режима выполнения точной настройки.
Во время режима выполнения точной настройки вызывается перемещение антенны 7 на очень маленькие приращения, например, на один градус, посредством соответственного устанавливания "счета привода" для обнаружения дуги, в которой возможно исправление ошибки. Как показано на фиг. 6, "счет привода" увеличивается на единицу счета до тех пор, пока больше невозможно будет исправление ошибки. Значение "счета привода" в этот момент запоминается в виде "счета 1", а направление вращения привода изменяется на противоположное. Значение "счета 1" соответствует первой границе дуги, на которой возможна коррекция ошибок, а изменение направления вращения на противоположное вызывает такое расположение антенны 7, чтобы опять оказалось возможным исправление ошибок. После этого "счет привода" уменьшается на счет, равный единице, до того момента, пока снова будет невозможным исправление ошибок. Значение "счета привода" в этой точке запоминается как "счет 2". Значение "счета 2" соответствует второй границе дуги, на которой возможно исправление ошибок. После этого рассчитывается разница между значениями "счета 1" и "счета 2", разница делится пополам, а результат добавляется к значению "счета 2" (или в качестве альтернативы вычитается из значения "счета 1") для получения окончательного значения "счета привода". Это вызывает установление антенны в среднее положение между двумя границами дуги, на которой возможно исправление ошибки.
Хотя изобретение описано со ссылкой на конкретный способ и устройство, следует понимать, что специалисты в данной области техники могут делать усовершенствования и модификации. Например, хотя в раскрытых способе и аппаратуре ручной ориентации для правильной и неправильной ориентации используются непрерывный тон и прерывистый тон соответственно, для обозначения этих состояний можно также использовать два других слышимых выходных сигнала, таких как тоны разных частот или двух разных уровней. Кроме того, хотя изобретение раскрыто относительно регулировки положения антенны по азимуту, следует понимать, что такая регулировка применима также для других ориентаций антенны. Эти и другие модификации предназначены для включения в объем притязаний изобретения, определяемый нижеприведенной формулой изобретения.
Изобретение предназначено для приема спутниковых трансляций. Технический результат заключается в упрощении настройки. Угол места антенны устанавливают в соответствии с положением места приема. После этого грубо устанавливают азимут антенны с помощью первого вращения антенны на небольшие приращения с целью нахождения области, в которой возможна коррекция ошибок. Во время этого процесса грубой ориентации настроечное устройство спутникового приемного устройства пытается определить положение частоты настройки, на которой возможны и демодуляции и коррекция ошибок. Если после просмотра всего диапазона частот нужная частота не найдена, антенну поворачивают на небольшое приращение. После того, как найдено место, где возможна коррекция ошибок, инициируется процедура точной ориентации, при которой антенну поворачивают с целью определения границ азимутальной дуги, на которой можно непрерывно осуществлять коррекцию ошибки. После этого антенну устанавливают так, чтобы она находилась приблизительно на середине между двумя границами этой дуги. 2 с. и 5 з.п. ф-лы, 6 ил.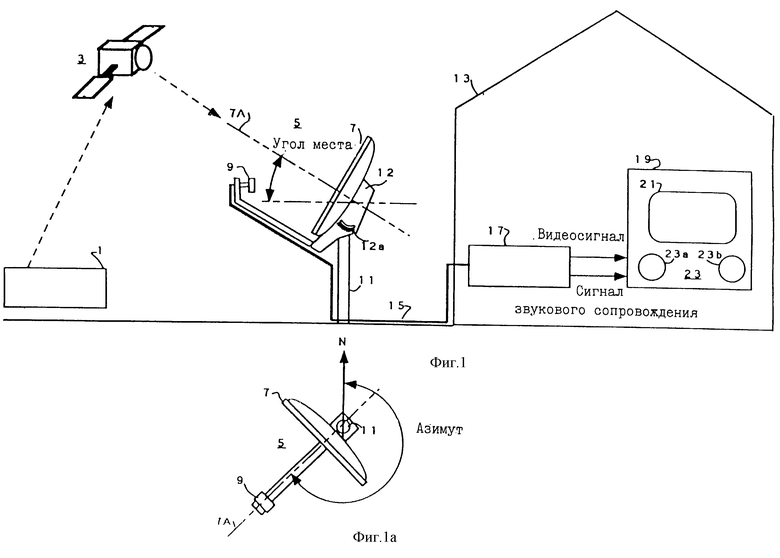
| US 4893288 А, 09.01.1990 | |||
| Способ временной изоляции призабойной зоны пласта | 1975 |
|
SU579408A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО АНТЕННЫ | 1990 |
|
RU2007793C1 |
| АНТЕННА СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ | 1992 |
|
RU2006997C1 |

