Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
Настоящее изобретение касается схемы и способа передачи данных поискового вызова в системе поискового вызова, более конкретно схемы и способа задержки опорного сигнала синхронизации из приемного устройства глобальной спутниковой системы радиоопределения для обеспечения одновременной передачи данных поискового вызова в системе поискового вызова.
2. Описание связанной области техники
Обычная система поискового вызова предлагает различные виды обслуживания беспроводного вызова для каждого пейджера (абонентский приемник системы поискового вызова) в системе. Система поискового вызова включает в себя множество базовых узлов, которые предлагают обслуживание вызова для ячейки (т. е. определенной области). Каждый базовый узел принимает данные вызова от оконечной аппаратуры системы поискового вызова и посылает сигнал вызова по воздуху на пейджер в подходящей области. Каждый базовый узел должен одновременно послать данные системы поискового вызова таким образом, чтобы предотвратить прием оконечной аппаратурой пейджера (расположенной в перекрываемой области ячейки) идентичных сигналов от многих базовых узлов и снизить интенсивность ошибок принимаемых данных.
Исторически для одновременной передачи данных поискового вызова использовали различные способы. Сейчас в популярном способе обеспечения одновременной передачи данных поискового вызова используется приемное устройство глобальной спутниковой системы радиоопределения ("ГССР") для синхронизирования передачи данных поискового вызова по абсолютному времени. Система ГССР является спутниковой системой радиосвязи, в которой используются различные спутники, вращающиеся вокруг Земли, для определения местоположения или направления подвижных тел, таких как самолет и корабли. Способ работы приемного устройства ГССР включает в себя передачу многочисленных волн полного периода на спутник и измерение сдвига по фазе между передаваемой волной и принимаемой со спутника волной. Обычный способ передачи данных поискового вызова, использующий приемное устройство ГССР, включает в себя посылку синхронизированных данных поискового вызова, основываясь на информации абсолютного времени из быстродействующей системы поискового вызова с высокоскоростным протоколом системы поискового вызова.
В общем, систему поискового вызова можно разделить на оконечную аппаратуру поискового вызова, которая вырабатывает данные поискового вызова из информации, принимаемой от абонента, и базовый узел, который принимает данные поискового вызова с оконечной аппаратуры поискового вызова и передает радиорелейную частоту на соответствующий пейджер. Участок базового узла системы поискового вызова дополнительно можно разделить на (1) участок управления передающим устройством для объединения данных поискового вызова (принимаемых с оконечной аппаратуры поискового вызова) с соответствующим протоколом, синхронизирующий принимаемые данные поискового вызова в соответствии с информацией абсолютного времени (т.е. опорного сигнала синхронизации) из приемного устройства ГССР и посылающий принимаемые данные поискового вызова в (2) участок передающего устройства, в котором принимаемые данные поискового вызова модулируются по радиорелейной частоте и затем передаются на соответствующий пейджер.
Поскольку способ синхронизации передачи данных поискового вызова основан на системе поискового вызова, использующей высокоскоростной протокол системы поискового вызова, контроллер передающего устройства, связанный с каждым базовым узлом, должен заранее определить точное время, в которое должны быть посланы данные поискового вызова. Это определение выполняется на основании принимаемых данных поискового вызова и информации системы отсчета с оконечной аппаратуры поискового вызова. Затем, в определенное время, контроллер передающего устройства посылает данные поискового вызова в передающее устройство, в котором данные поискового вызова модулируются по радиорелейной частоте и затем передаются. Как было показано выше, контроллер передающего устройства отвечает за организацию всей информации времени и за синхронизацию и передачу данных поискового вызова в передающее устройство.
Существует несколько проблем, связанных с действительным внедрением обычного способа одновременной передачи данных поискового вызова, как было описано выше. Во-первых, поскольку конфигурация одновременной передачи данных поискового вызова основана на установке оконечной аппаратуры поискового вызова, только контроллер передающего устройства учитывает согласование во времени передачи данных поискового вызова (т.е. передающее устройство не может учитывать эти аспекты). Другими словами, даже если контроллер передающего устройства синхронизирует передачу данных поискового вызова, основываясь на информации об абсолютном времени, передающее устройство может только выполнять частотную модуляцию и передачу данных поискового вызова, принимаемых из контроллера передающего устройства. Кроме того, даже если контроллер передающего устройства посылает данные поискового вызова в передающее устройство в надлежащее время (т.е. описанное выше определенное время), нет способа компенсировать временную задержку, которая может возникнуть между временем, в которое передающее устройство принимает и модулирует данные поискового вызова, и временем, в которое оно эти данные передает.
Со ссылкой на фиг. 1 известного уровня техники показана временная диаграмма для передачи данных поискового вызова из контроллера передающего устройства и передачи радиорелейных данных поискового вызова из передающего устройства в соответствии с опорным сигналом синхронизации, 1ИВС (импульс в секунду) из ГССР. В частности, фиг. 1(а) иллюстрирует сигнал 1ИВС из ГССР. Фиг. 1(b) иллюстрирует временную диаграмму передачи данных поискового вызова с контроллера передающего устройства в передающее устройство, которые синхронизированы по абсолютному времени в n секунд. Фиг. 1(с) иллюстрирует сигнал синхронизации передачи данных поискового вызова, который является опорным, считываемым в данных поискового вызова из передающего устройства. Фиг. 1(d) показывает временную диаграмму передачи принимаемых данных поискового вызова (которые модулированы по радиорелейной частоте) из передающего устройства.
На фиг. 1(b) контроллер передающего устройства синхронизирован по абсолютному времени в n секунд, посредством чего данные поискового вызова, а также сигнал синхронизации передачи посылаются в передающее устройство.
Передающее устройство принимает переданный сигнал синхронизации и считывает данные поискового вызова в ответ на фронт каждого сигнала синхронизации. Затем передающее устройство модулирует данные поискового вызова по радиорелейной частоте и передает их.
Как показано на фиг. 1, существует временная задержка, связанная со считыванием данных поискового вызова передающим устройством, которая называется задержкой выборки данных ("ЗВД"), а также временная задержка, связанная с процессом модуляции данных поискового вызова (которые считываются) по радиорелейной частоте, которая называется задержкой частотной модуляции ("ЗЧМ"). Полагая, что сумма этих двух периодов времени задержки является общим временем (X) задержки передающего устройства, из фиг. 1 становится ясно, что фактическое время передачи данных поискового вызова из передающего устройства не может быть синхронизировано по абсолютному времени n. В частности, модулированные данные поискового вызова передаются с временной задержкой X (т.е. временем задержки передающего устройства), по сравнению с абсолютным временем n.
Существуют различные отличия в периодах времени задержки между имеющимися в настоящее время коммерчески доступными передающими устройствами. Даже передающие устройства, которые собирает одна и та же компания, имеют небольшие погрешности между собой, которые вызывают изменения длительности времени задержки этих передающих устройств. В результате этого, во время фактического применения, даже когда обслуживание системы поискового вызова предлагается посредством согласования различных передающих устройств, существуют отличия во времени передачи окончательной радиорелейной передачи каждым передающим устройством в системе, тем самым предотвращая одновременную передачу данных поискового вызова. Следовательно, при фактическом применении, когда принимаются данные поискового вызова, интенсивность ошибок возрастает из-за различий во времени передачи из передающих устройств, имеющих разные периоды времени задержки.
Краткое изложение сущности изобретения
Поэтому технической задачей настоящего изобретения является разрешение этой проблемы путем обеспечения схемы для задержки опорного сигнала синхронизации (1ИВС), образованной приемным устройством ГССР, тем самым управляя временем, в которое данные поискового вызова посылаются из контроллера передающего устройства узла системы поискового вызова в передающее устройство так, чтобы компенсировать ошибки, вызываемые временем задержки, связанным с передающим устройством, и обеспечить способ синхронизации данных поискового вызова (передаваемых в виде радиорелейной частоты) по абсолютному времени так, чтобы добиться одновременной передачи таких данных.
В одном аспекте настоящего изобретения схема для задержки опорного сигнала синхронизации от приемного устройства глобальной спутниковой системы радиоопределения (ГССР) содержит: шину данных; триггер, подсоединенный к шине данных и реагирующий на входной сигнал триггера, предназначенный для приема сигнала из шины данных; счетчик-контроллер, подсоединенный к шине данных и реагирующий на опорный сигнал синхронизации, принимаемый из приемного устройства ГССР (1ИВС), для подсчета серии импульсов опорного сигнала синхронизации счетчика и генерирования в ответ на нее выходного сигнала счетчика, благодаря чему счетчик-контроллер начинает подсчет импульсов опорного сигнала синхронизации счетчика в ответ на сигнал 1ИВС; и компаратор, подсоединенный к триггеру и счетчику-контроллеру, предназначенному для приема сигнала шины данных из триггера и для генерирования задержанного сигнала (1ИВС) в ответ на сигнал шины данных, принимаемый из триггера, и выходной сигнал счетчика из счетчика-контроллера.
В соответствии с другим аспектом настоящего изобретения способ одновременной передачи данных поискового вызова в системе поискового вызова, имеющей множество контроллеров передающих устройств для приема данных поискового вызова, и передающее устройство, связанное с каждым из контроллеров передающих устройств для модуляции и передачи данных поискового вызова, принимаемых из соответствующего контроллера передающего устройства, содержит этапы: введения опорного сигнала синхронизации из приемного устройства глобальной спутниковой системы радиоопределения (ГССР) во множество контроллеров передающих устройств системы поискового вызова; задержки на величину 1 - X секунд, опорного сигнала синхронизации из приемного устройства глобальной спутниковой системы радиоопределения (ГССР), который поступает в каждый из контроллеров передающих устройств, где величина X является временем задержки, связанным с передающим устройством, связанным с каждым из контроллеров передающих устройств; посылки данных поискового вызова из множества контроллеров передающих устройств на каждый из связанных передающих устройств в соответствии с задержанным сигналом синхронизации; и одновременной передачи данных поискового вызова из множества передающих устройств, причем одновременная передача данных поискового вызова является синхронизированной опорным сигналом синхронизации с риемного устройства ГССР.
В соответствии с еще одним аспектом настоящего изобретения система поискового вызова для обеспечения одновременной передачи данных поискового вызова содержит
средство для приема опорного сигнала синхронизации из приемного устройства глобальной спутниковой системы радиоопределения (ГССР) с помощью множества контроллеров передающих устройств,
средство, оперативно подсоединенное к каждому из упомянутого множества контроллеров передающих устройств для задержки на величину 1 - X секунд упомянутого опорного сигнала синхронизации,
средство для посылки упомянутых данных поискового вызова из упомянутого множества контроллеров передающих устройств во множество передающих устройств, каждое из которых соответствует одному из упомянутого множества контроллеров передающих устройств, в соответствии с упомянутым задержанным опорным сигналом синхронизации, причем упомянутая величина X представляет время задержки каждого из передающих устройств,
средство для одновременной передачи упомянутых данных поискового вызова из упомянутого множества передающих устройств, где упомянутая одновременная передача данных поискового вызова синхронизируется упомянутым опорным сигналом синхронизации из упомянутого приемного устройства ГССР.
Эти и другие цели, особенности и преимущества настоящего изобретения станут понятными из последующего подробного описания иллюстративных вариантов его осуществления, которые следует читать в связи с прилагаемыми чертежами.
Краткое описание чертежей
Фиг. 1(a)-(d) иллюстрируют обычные временные диаграммы передачи данных поискового вызова из контроллера передающего устройства в передающее устройство и передачи модулированных данных поискового вызова из передающего устройства в качестве опорных для сигнала 1ИВС из ГССР.
Фиг. 2 иллюстрирует блок-схему для задержки опорного сигнала синхронизации 1ИВС для обеспечения в соответствии с настоящим изобретением задержанного сигнала (1ИВС').
Фиг. 3(a) и (b) иллюстрируют временные диаграммы, показывающие соответствующее настоящему изобретению соотношение между опорным сигналом синхронизации (1ИВС) из ГССР и соответствующим задержанным сигналом 1ИВС'.
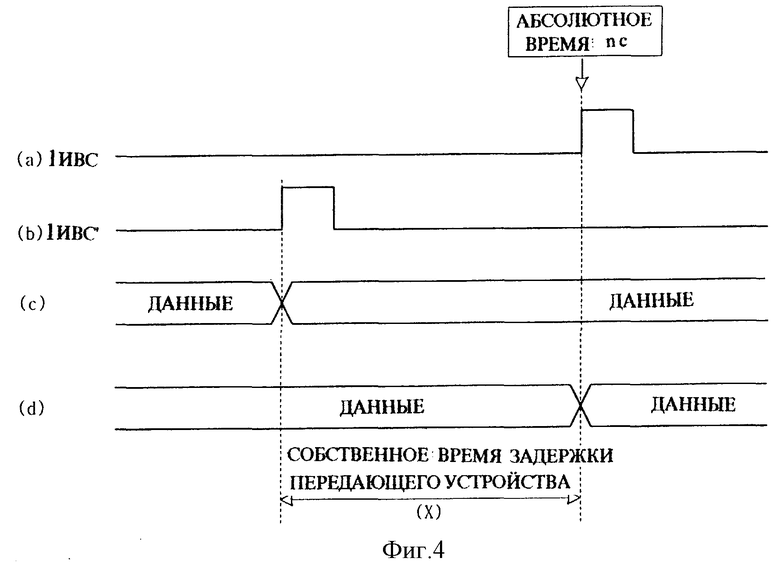
Фиг. 4 (a)-(d) иллюстрируют временные диаграммы для соответствующего настоящему изобретению способа посылки данных поискового вызова из контроллера передающего устройства и передачи модулированных данных поискового вызова из передающего устройства в качестве опорных для опорного сигнала синхронизации 1ИВС и задержанного сигнала 1ИВС'.
Подробное описание предпочтительных вариантов осуществления изобретения
Рассмотрим фиг. 2, где представлена блок-схема, иллюстрирующая соответствующую настоящему изобретению блок-схему для задержки опорного сигнала синхронизации 1ИВС с целью обеспечения задержанного сигнала (1ИВС'). На фиг. 2 шина данных для введения данных в триггер (обозначенная позицией D1) предусмотрена для введения желательной временной задержки в триггер (100) и счетчик-контроллер (200). Когда подается входной сигнал триггера, триггер (100) устанавливает величину входной временной задержки в компараторе (300) через шину данных (D2) для введения данных из триггера в компаратор.
Теперь посредством примера будет описана работа схемы. Предположим, что время задержки X передающего устройства равно 10 мс. Тогда схема конфигурируется для задержки сигнала 1ИВС на 1 с - 10 мс = 990 мс, чтобы генерировать задержанный сигнал 1ИВС ("1ИВС'"). Для того чтобы получить это время задержки, опорная синхронизация (120) счетчика должна быть установлена на частоте 100 Гц таким образом, чтобы получать синхронизирующие импульсы каждые 10 мс (т. е. период 10 мс). Эти импульсы вводятся в счетчик-контроллер (200) и подсчитываются. Упомянутый счетчик-контроллер начинает подсчет упомянутых импульсов упомянутого опорного сигнала синхронизации счетчика в ответ на упомянутый сигнал 1ИВС. Если эти синхронизирующие импульсы насчитывают 99 раз, сигнал 1ИВС может быть задержан на 990 мс. Поскольку в приведенном выше примере задержка должна составлять 990 мс ступенями в 10 мс, величина задержки 99 (шестнадцатиричная величина 63) подается в шину данных D1. Понятно, что если требуется ступень меньше 10 мс, можно использовать опорную синхронизацию более высокой частоты и единица измерения счетчика может быть увеличена.
Как только величина задержки будет установлена в компараторе 300, счетчик-контроллер (200) начинает подсчитывать 10 мс-ные опорные синхронизирующие импульсы, когда он принимает первый сигнал 1ИВС из ГССР. Счетчик-контроллер (200) непрерывно выдает показания счетчика, которые поступают в компаратор (300) по выходной линии счетчика (обозначенной позицией С1). В компараторе (300) желательная временная задержка (которая принимается из триггера (100)) и значение счетчика (которое поступает из счетчика-контроллера (200)) непрерывно сравниваются. Если определяется, что эти две величины отличаются, счетчик-контроллер (200) продолжает подсчитывать и задерживать исходный сигнал 1ИВС с 10 мс-ми приращениями. Когда выходное значение сигнала счетчика (которое подсчитывается непрерывно с 1) совпадает с величиной задержки, установленной в компараторе (300) (которая в приведенном выше примере составляет 99), компаратор (300) выдает сигнал 1ИВС', который является задержанным на 990 мс (99 раз 10 мс-ми ступенями) по сравнению с сигналом 1ИВС. Затем сигнал 1ИВС' поступает в счетчик-контроллер (200) для установки счетчика в исходное положение. Этот процесс повторяется для каждого импульса сигнала 1ИВС, который поступает в счетчик-контроллер (200), чтобы создать задержанный на 990 мс сигнал 1ИВС'.
Как было продемонстрировано выше, обычный способ посылки данных поискового вызова из контроллера передающего устройства в передающее устройство основан на информации абсолютного времени (т.е. сигнале 1ИВС) и не учитывает время задержки передающего устройства. Теперь со ссылкой на фиг. 3 и 4 будет описан соответствующий настоящему изобретению способ компенсации времени задержки передачи передающего устройства путем необязательного управления моментом передачи данных поискового вызова. В соответствии с настоящим изобретением опорное время для посылки данных поискового вызова из контроллера передающего устройства в передающее устройство определяется с помощью сигнала 1 ИВС', который генерируется с помощью задержки сигнала 1 ИВС из ГССР. Если сигнал 1ИВС' представить в виде времени, равного импульсу абсолютного времени 1 с в сигнале 1ИВС, это эквивалентно генерированию сигнала 1ИВС в момент времени X заранее, где X является временем задержки передающего устройства. В частности, временная диаграмма фиг. 3 иллюстрирует сигнал 1ИВС', генерируемый с помощью задержки сигнала 1ИВС (как описывалось выше) на 1-Х = 990 мс (где X полагали равным 10 мс). Как показано на фиг. 3(a) и (b), когда сигнал 1 ИВС задерживается на время 1 - X, сигнал 1ИВС' является по существу сигналом, который продвинут вперед на время X относительно сигнала 1ИВС, при оценке в абсолютном времени. Как было установлено выше, сигнал 1ИВС' (в противоположность сигналу 1ИВС) является опорным сигналом, с помощью которого контроллер передающего устройства посылает данные поискового вызова в передающее устройство. Здесь отмечается, что упомянутый сигнал 1 ИВС' служит в качестве опорного сигнала синхронизации, используемого контроллером передающего устройства для посылки данных вызова в передающее устройство. Само по себе, продвинутое вперед время X компенсирует время задержки X передающего устройства. Следовательно, благодаря применению этого способа, окончательный момент передачи из передающего устройства будет синхронизирован по абсолютному времени, несмотря на время задержки передающего устройства.
Например, как показано на фиг. 3, после задержки сигнала 1ИВС (в момент абсолютного времени 00 секунд) на какую-либо величину, задержанный сигнал (то есть 1ИВС') применяется в следующий момент абсолютного времени 01 секунду. По существу, при согласовании с передающим устройством с временем задержки X и после задержки сигнал 1ИВС (в момент времени 00 секунд) на 1-X этот задержанный сигнал 1ИВС' применяется а момент абсолютного времени 01 секунда.
Со ссылкой на фиг. 4 представлены временные диаграммы для соответствующего настоящему изобретению способа посылки данных поискового вызова из контроллера передающего устройства и передачи модулированных данных поискового вызова из передающего устройства, опираясь на опорный сигнал синхронизации 1ИВС и задержанный сигнал 1ИВС'. Как было показано выше и дополнительно изображено на фиг. 4 (a) и (b), сигнал 1ИВС', по существу, является сигналом, продвинутым вперед на время X в абсолютном времени. Временные диаграммы на фиг. 4 (b) и 4 (с) показывают, что передача данных из контроллера передающего устройства в передающее устройство в соответствии с настоящим изобретением синхронизирована по сигналу 1ИВС'. Далее, временные диаграммы на фиг. 4 (а) и 4 (d) показывают, что передача данных (модулированных по радиорелейной частоте) из передающего устройства в соответствии с настоящим изобретением синхронизирована по сигналу 1ИВС. В итоге, контроллер передающего устройства посылает данные поискового вызова в передающее устройство в соответствии с сигналом 1 ИВС'. Затем данные поискового вызова передаются из передающего устройства, по существу, в задержанный момент времени X, который синхронизирован по абсолютному времени n секунд (т.е. сигнал 1ИВС).
Имеются несколько преимуществ в использовании описанного выше соответствующего настоящему изобретению способа в системе поискового вызова. Во-первых, поскольку момент передачи данных поискового вызова из контроллера передающего устройства в передающее устройство может быть продвинут вперед (с точки зрения абсолютного времени), момент передачи может быть скомпенсирован, независимо от времени задержки передающего устройства. В частности, контроллер передающего устройства посылает данные поискового вызова в передающее устройство в продвинутый момент времени X (т.е. время задержки передающего устройства), так что время передачи сигнала радиорелейной частоты из передающего устройства синхронизировано по абсолютному времени (т.е. сигнал 1ИВС). Следовательно, независимо от времени задержки передающего устройства, все базовые узлы могут одновременно передавать данные поискового вызова (через их соответствующие передающие устройства).
Более того, даже если различные передающие устройства, имеющие разные связанные с ними длительности времени задержки, согласуются и используются в системе поискового вызова, контроллер передающего устройства посылает данные поискового вызова в момент времени, который регулируется заранее в соответствии с каждым временем задержки передающего устройства, тем самым предлагая пользователю гибкую систему. Это способствует легкости изготовления и усовершенствования, поскольку изготовителю передающих устройств не требуется факультативно фиксировать время задержки для каждого передающего устройства.
Описанный выше способ одновременной передачи также минимизирует интенсивность ошибок приема данных поискового вызова, которые могут появляться в областях перекрытия ячеек. Кроме того, можно разработать эффективную систему, так как в каждом узле можно применять эту концепцию одновременной передачи данных во все системы.
Хотя здесь были раскрыты иллюстративные варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи, следует понимать, что изобретение не ограничивается только этими вариантами осуществления и что специалисты в данной области техники могут выполнять здесь различные другие изменения и модификации, не выходя при этом за рамки сущности и объема притязаний изобретения. Все такие изменения и модификации предназначены для включения в объем притязаний изобретения, определяемый прилагаемой формулой изобретения.



Изобретение касается схемы и способа, которые обеспечивают одновременную передачу данных поискового вызова в системе поискового вызова с помощью задержки опорного сигнала синхронизации из глобальной спутниковой системы радиоопределения (ГССР). Способ передачи данных поискового вызова в системе поискового вызова содержит этапы введения опорного сигнала синхронизации из приемного устройства ГССР во множество контроллеров передающих устройств, задержку на величину 1 - X с опорного сигнала синхронизации, который вводится в каждый из множества контроллеров передающих устройств, причем величина Х является временем задержки, связанным с передающим устройством, связанным с каждым из контроллеров передающих устройств, передачи данных поискового вызова из множества контроллеров передающих устройств в каждое из передающих устройств в соответствии с задержанным сигналом синхронизации и одновременной передачи данных поискового вызова из множества передающих устройств, в силу чего одновременная передача данных поискового вызова синхронизируется опорным сигналом синхронизации из приемного устройства ГССР, несмотря на различие во времени передачи, связанное с каждым из передающих устройств. 2 с. и 5 з.п. ф-лы, 4 ил.
| Устройство синхронизации плезиохронных сигналов | 1990 |
|
SU1737746A1 |
| ПРОЕКТОР ДЛЯ КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ | 0 |
|
SU258621A1 |
| DE 3927580 A1, 08.03.1990 | |||
| US 4696052, 22.09.1987. | |||

