Область техники
Изобретение относится к устройству и способу поиска фазы ПШ (псевдослучайной шумовой) последовательности в системе мобильной связи МДКР (множественного доступа с кодовым разделением), а более точно - к устройству и способу поиска фазы ПШ-последовательности в системе мобильной связи МДКР, в которой используются множественные несущие.
Предшествующий уровень техники
Система мобильной связи МДКР прошла путь от передачи/приема речевого сигнала до IMT-2000 (телекоммуникации с импульсной модуляцией), которая может обеспечивать, помимо передачи речи, высокоскоростную передачу данных. Задача IMT-2000 состоит в передаче высококачественных речевых данных и движущихся изображений, а также в высокоскоростном просмотре в Интернете. Для системы IMT-2000 была предложена схема множественных несущих, в которой передача адресованной информации осуществляется посредством совокупности несущих. Схема множественных несущих представляет собой процесс модулирования информации, расширенной по спектру одной и той же ПШ-последовательностью, посредством разных несущих до осуществления передачи.
Передатчик в составе системы МДКР с множественными несущими преобразует информационный сигнал в совокупность параллельных сигналов и умножает параллельные сигналы на ПШ-последовательность для расширения по спектру. Затем передатчик умножает каждый из расширенных по спектру сигналов на различные локальные несущие для модуляции. Данные передаются в различных полосах частот. Когда передатчик преобразует информационный сигнал в параллельные сигналы, информационный сигнал разделяется на совокупность полосовых сигналов в полосе модулирующего сигнала и преобразуется в ВЧ-сигнал путем умножения полосовых сигналов на заданную единую несущую, соответствующую средней частоте несущей. Приемник демодулирует информационный сигнал путем умножения каждого из полосовых сигналов на соответствующую локальную несущую.
Базовая станция (БС) в системе МДКР с множественными несущими передает пилот-сигнал, модулированный ПШ-последовательностью, со своим собственным сдвигом фазы ПШ. Мобильные станции (МС) осуществляют поиск соответствующих фаз ПШ-последовательности сигналов, передаваемых посредством множественных несущих, используя схему последовательного поиска или схему параллельного поиска.
При включении питания МС осуществляет обнаружение канала пилот-сигнала. МС выполняет поиск начальной фазы ПШ-последовательности в соответствии с критическим условием, налагаемым на начальные точки ПШ-последовательности, генерированной на БС и автономно инициированной ПШ-последовательности. Если происходит сброс вызова и требуется повторное обнаружение ПШ, МС возобновляет поиск фазы ПШ-последовательности.
На фиг. 1 показан вариант выполнения искателя фазы ПШ-последовательности, входящего в состав системы мобильной связи МДКР, в которой используется схема последовательного поиска.
Контроллер 150 (фиг. 1) обеспечивает общее управление искателем фазы ПШ-последовательности. Кроме того, контроллер 150 управляет различными параметрами, включая период интегрирования, размер окна и период асинхронного накопления, и управляет сменой фазы ПШ-последовательности, генерируемой генератором 160 ПШ-кода. Сигнал, поступающий на искатель фазы ПШ-последовательности, может представлять собой сигнал, прошедший ВЧ-обработку на мобильной станции, т.е. преобразованный с понижением частоты, оцифрованный и пропущенный через модемную микросхему. В данном случае входной сигнал включает ПШ-последовательность, генерированную на конкретной БС.
Сжиматель 110 умножает сигнал, принятый в конкретный момент времени, на ПШ-последовательность, принятую от генератора 160 ПШ-кода, для сжатия спектра сигнала. Начальная точка, с которой нужно начинать поиск фазы ПШ-последовательности, генерированной на БС, устанавливается заранее. Например, начальная точка поиска фазы может представлять собой ПШ-сдвиг "0".
Накопитель 120 синхронизации накапливает выходной сигнал сжимателя 110 в течение соответствующего периода интегрирования. Калькулятор 130 энергии вычисляет детектированную энергию на основании накопленного значения в соответствии с корреляцией между ПШ-последовательностью, генерированной на БС, и ПШ-последовательностью, генерированной на МС. Компаратор 140 сравнивает энергии друг с другом и выдает максимум 4 энергии и ее фазу ПШ. Контроллер 170 управляет сменой фазы ПШ-последовательности, генерированной генератором 160 ПШ-кода. В случае уверенного обнаружения фазы ПШ-последовательности, удовлетворяющей заданному условию, контроллер 150 сообщает процессору верхнего уровня (не показан) обнаруженную фазу ПШ-последовательности. Затем МС демодулирует сигналы, принятые по синхроканалу и каналу поискового вызова.
После осуществления поиска фазы ПШ-последовательности контроллер 150 принимает от процессора верхнего уровня информацию по сдвигу соответствующего пилот-сигнала и управляет различными параметрами приемника таким образом, чтобы он мог измерить уровень приема пилот-сигнала, переданного соседней БС, и сравнить его с уровнем приема пилот-сигнала, обеспечиваемого текущим обслуживанием. Это называется работой с группой.
МС работает с информацией по текущей БС, на которой зарегистрирована данная МС, и другим БС. МС принимает по каналам поискового вызова сообщение, содержащее список близлежащих БС и включающее в себя информацию по ПШ-сдвигу каждой БС, измеряет уровень пилот-сигнала, принятого от каждой из близлежащих БС, и на основании результатов измерения определяет необходимость переключения. Иными словами, МС работает с активной группой, ближней группой и группой кандидатов. Активная группа соответствует БС, которые в данный момент находятся на связи с МС, ближняя группа включает в себя БС, являющиеся наиболее вероятными кандидатами на переключение, а группа кандидатов включает в себя БС, которые в данный момент не используются для демодуляции данных, но имеют достаточно высокую энергию для демодуляции данных.
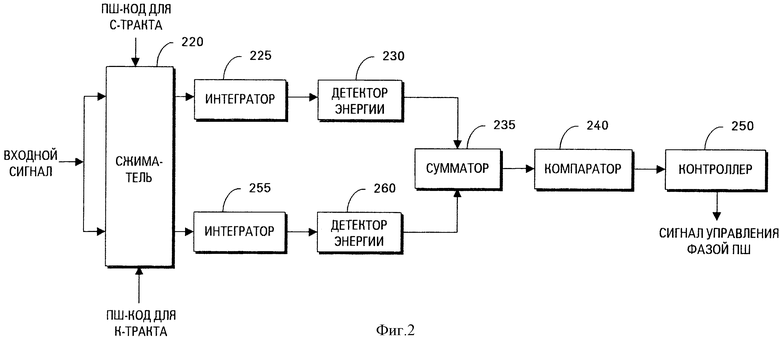
На фиг. 2 показана блок-схема другого варианта выполнения последовательного искателя фазы ПШ-последовательности, входящего в состав системы мобильной связи МДКР.
Умножители 202 и 206, входящие в состав демодулятора несущей 210, умножают входной сигнал на локальные несущие, соответственно, cosωHt и sinωHt, в результате чего входной сигнал демодулируется в синфазный сигнал С и квадратурный сигнал К. Согласованные фильтры 204 и 208 восстанавливают формы волны сигналов С и К, тогда как сжиматель 220 сжимает по спектру восстановленные сигналы С и К посредством ПШ-кода С-тракта и ПШ-кода К-тракта, принятых от генератора ПШ-кода (не показан). Интеграторы 225 и 255 накапливают сжатые по спектру сигналы С и К в течение заданного периода интегрирования. Детекторы энергии 230 и 260 возводят суммы в квадрат и вычисляют детектированные энергии на основании корреляции между ПШ-кодом, генерированным на БС, и ПШ-кодом, генерированным на МС. Сумматор 235 суммирует выходные сигналы детекторов энергии 230 и 260. Компаратор 240 сравнивает вычисленную детектированную энергию с порогом детектированной энергии. Контроллер 250 подает соответствующий сигнал управления фазой ПШ на генератор ПШ-кода в соответствии с результатом сравнения.
Согласно вышеописанному МС может производить поиск фазы ПШ-последовательности сигнала, передаваемого от БС посредством множественных несущих, с использованием схемы последовательного поиска или схемы параллельного поиска в системе мобильной связи МДКР с множественными несущими.
Однако, если в системе мобильной связи МДКР с множественными несущими требуется производить последовательный поиск фазы ПШ различных полосовых сигналов, то одиночный последовательный искатель фазы ПШ-последовательности должен одновременно производить поиск совокупности ПШ-последовательностей (например, трех ПШ-последовательностей), из-за чего время, которое требуется на поиск фазы ПШ-последовательности и на работу с набором, увеличивается, а эффективность приема значительно снижается. В частности, при осуществлении переключения одиночный последовательный искатель фазы ПШ-последовательности не может быстро справляться со скоростью смены каналов в среде быстрой смены каналов. В результате повышается вероятность сброса вызова.
Для решения этой проблемы можно либо увеличить быстродействие последовательного искателя фазы ПШ-последовательности, либо использовать параллельный искатель фазы ПШ-последовательности. Осуществляя последовательный поиск фаз ПШ-последовательности разных полосовых сигналов в системе мобильной связи МДКР с множественными несущими, одиночный последовательный искатель фазы ПШ-последовательности может работать в N раз быстрее (N - это количество принимаемых полосовых сигналов). Например, в 3-полосной системе связи МДКР вместо 8-кратного искателя фазы ПШ-последовательности можно использовать 24-кратный искатель фазы ПШ-последовательности. 24-кратный искатель фазы ПШ-последовательности может обрабатывать 3-полосную ПШ-последовательность, но его использование затруднительно по причине значительного увеличения сложности аппаратной реализации.
Чтобы создать искатель фазы ПШ-последовательности, основанный на схеме параллельного поиска, можно параллельно соединить последовательные искатели фазы ПШ-последовательности (фиг. 2). Каждый искатель фазы ПШ-последовательности осуществляет поиск фазы ПШ-последовательности соответствующего сигнала среди многополосных входных сигналов. Если каждый искатель фазы ПШ-последовательности производит поиск фазы ПШ-последовательности на соответствующем входном полосовом сигнале, генерированном конкретной БС, с одной и той же начальной точки, предполагается, что одна и та же гипотеза на каждой полосе является предметом поиска фазы ПШ-последовательности. Поэтому время, необходимое на поиск фазы ПШ-последовательности, почти такое же, как в схеме последовательного поиска. Поскольку эффективность искателя фазы ПШ-последовательности оценивается в соответствии с его способностью к снижению среднего времени поиска, то перед тем, как применять схему параллельного поиска к системе мобильной связи МДКР с множественными несущими, следует изучить способ снижения среднего времени поиска.
Каждая БС имеет уникальный ПШ-сдвиг пилот-сигнала, необходимый для идентификации БС в системе мобильной связи МДКР. В системе множественных несущих входные сигналы с различными несущими, иначе говоря, различные входные полосовые сигналы, передаваемые конкретной БС, имеют один и тот же ПШ-сдвиг пилот-сигнала. Однако полосовые сигналы не установлены в одной и той же среде замирания ввиду природы среды мобильной связи. Поэтому для передачи БС нагружает сигнал каждой полосы или несущей одним и тем же пилот-сигналом, чтобы МС могла осуществлять поиск фаз ПШ-последовательности всех полосовых сигналов или сигналов со всеми несущими.
Поэтому, если каждый последовательный искатель фазы ПШ-последовательности, действующий в схеме параллельного поиска, выполняет поиск фазы ПШ-последовательности путем генерирования ПШ-последовательности с различных начальных точек поиска фазы, среднее время поиска фазы ПШ-последовательности можно снизить. Например, для осуществления поиска ПШ-последовательности с помощью 32768 гипотез, число 32768 гипотез делится на N, где N - это количество последовательных искателей фазы ПШ-последовательности, причем каждый последовательный искатель ПШ-последовательности генерирует ПШ-код с фазовой точки соответствующего сегмента. Таким образом, время, необходимое для поиска фазы ПШ-последовательности, можно сократить в N раз.
Хотя ПШ-сдвиг БС, входящей в состав системы мобильной связи МДКР с множественными несущими, одинаков для всех полосовых сигналов, передаваемых БС, влияние замирания и характеристики многолучевого распространения на каждой полосе различны. Таким образом, нет никакой гарантии в том, что каждый полосовой сигнал, принятый на МС, имеет одну и ту же фазу ПШ-последовательности. Поэтому в системе мобильной связи МДКР с множественными несущими поиск фазы ПШ-последовательности должен осуществляться на каждом из входных полосовых сигналов.
Когда конкретный последовательный искатель ПШ-последовательности завершает поиск фазы ПШ-последовательности, удовлетворяющий заданному условию, и диапазон минимального изменения фазы ПШ-последовательности определен, другие искатели фазы ПШ-последовательности выполняют поиск фаз ПШ-последовательности соответствующих им входных полосовых сигналов с использованием других условий поиска. Фазы ПШ-последовательности других входных полосовых сигналов будут находиться в пределах периода минимального изменения фазы. Поскольку все искатели фазы ПШ-последовательности работают в соответствии с различными условиями поиска, пока не будет определен период минимального изменения фазы, среднее время поиска фазы ПШ-последовательности сокращается. Поскольку большая часть времени поиска фазы ПШ-последовательности тратится на начальной стадии, время поиска фазы ПШ-последовательности можно сократить с коэффициентом 1/2 или 1/3.
После того как определен диапазон минимального изменения фазы ПШ-последовательности, каждый искатель фазы ПШ-последовательности должен выполнять поиск фазы ПШ-последовательности в течение периода минимального изменения фазы.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание устройства и способа поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими.
Другой задачей настоящего изобретения является создание устройства и способа поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, в котором каждый искатель фазы ПШ-последовательности осуществляет поиск фазы ПШ-последовательности одного из принятых сигналов из каждой полосы в соответствии с отдельным условием поиска, и производится определение диапазона минимального изменения фазы ПШ-последовательности, чтобы сократить среднее время поиска фазы ПШ-последовательности.
Еще одной задачей настоящего изобретения является создание устройства и способа поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, предусматривающие, что по меньшей мере два искателя фазы ПШ-последовательности осуществляют поиск фазы ПШ-последовательности одного из по меньшей мере двух полосовых сигналов в соответствии с различными условиями поиска и выдают информацию по фазе ПШ и энергии, и контроллер назначает искателям фазы ПШ-последовательности различные условия поиска, а на основании информации по фазе ПШ и энергии определяет период минимального изменения фазы.
Еще одной задачей настоящего изобретения является создание устройства и способа поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, предусматривающие, что по меньшей мере два искателя фазы ПШ-последовательности осуществляют поиск фазы одного из по меньшей мере двух полосовых сигналов в соответствии с различными условиями поиска и выдают информацию по фазе ПШ и энергии, и контроллер назначает искателям фазы ПШ-последовательности различные условия поиска и на основании информации по фазе ПШ и энергии определяет период минимального изменения фазы, а также что по меньшей мере два искателя фазы ПШ-последовательности осуществляют индивидуальный поиск фазы ПШ-последовательности назначенного (соответствующего) полосового сигнала в течение определенного периода минимального изменения фазы.
Еще одной задачей настоящего изобретения является создание устройства и способа поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, предусматривающие, что каждый искатель фазы ПШ-последовательности осуществляет поиск фазы ПШ-последовательности соответствующего входного полосового сигнала с отдельной начальной точки поиска.
Поставленная задача решается тем, что в устройстве поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими по меньшей мере два искателя фазы ПШ-последовательности осуществляют поиск фазы ПШ-последовательности одного из по меньшей мере двух различных входных полосовых сигналов с использованием различных назначенных условий поиска и выдают информацию по фазе ПШ и энергии, а контроллер назначает искателям фазы ПШ-последовательности различные условия поиска и на основании информации по фазе ПШ и энергии, принятой от искателей фазы ПШ-последовательности, определяет период минимального изменения фазы.
Согласно другому варианту реализации настоящего изобретения предусмотрен способ поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, в котором поиск фазы ПШ-последовательности одного из по меньшей мере двух различных входных полосовых сигналов осуществляется параллельно в соответствии с различными условиями поиска, осуществляется вывод информации по фазе ПШ и энергии, и на основании информации по фазе ПШ и энергии производится определение периода минимального изменения фазы ПШ.
Согласно еще одному варианту реализации настоящего изобретения, предусмотрен способ поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, в котором поиск фазы ПШ-последовательности одного из по меньшей мере двух различных входных полосовых сигналов осуществляется параллельно в соответствии с различными условиями поиска, осуществляется вывод информации по фазам ПШ и энергиям, сортировка по энергии и сравнение максимальной энергии с порогом; если значение максимальной энергии выше порога, то поиск фазы ПШ-последовательности производится в соответствии с новым условием поиска на основании энергии и ее фазы, осуществляется вывод информации по фазе ПШ и энергиям и частотной ошибке, осуществляется сортировка по энергии и сравнение максимальной энергии с более высоким порогом и сравнение частотной ошибки с частотным порогом, если максимальная энергия оказывается выше порога энергии, а частотная ошибка - ниже частотного порога, и определение периода минимального изменения фазы на основании информации по фазе, соответствующей информации по энергии, если энергия выше порога.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 изображает блок-схему варианта последовательного искателя фазы ПШ-последовательности в системе мобильной связи МДКР;
фиг. 2 представляет собой блок-схему другого варианта последовательного искателя фазы ПШ-последовательности в системе мобильной связи МДКР;
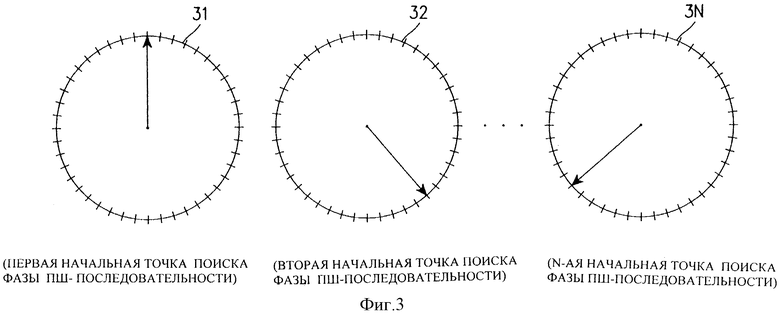
фиг. 3 иллюстрирует варианты различных начальных точек поиска для N последовательных искателей фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно изобретению;
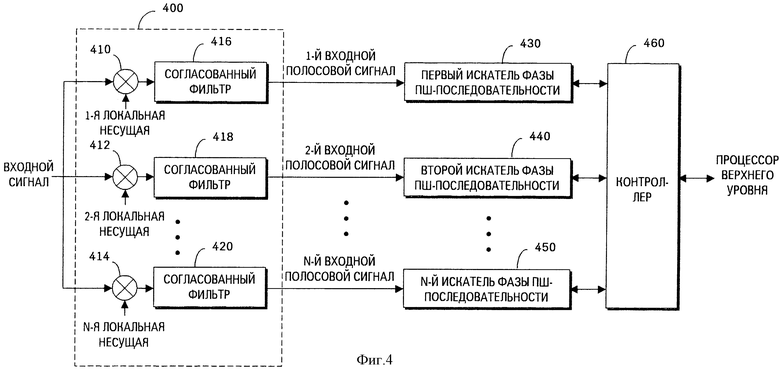
фиг. 4 представляет собой блок-схему варианта реализации аппаратуры поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно изобретению;
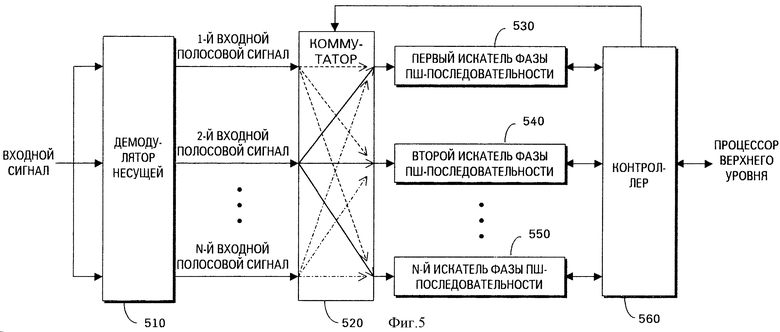
фиг. 5 представляет собой блок-схему другого варианта реализации аппаратуры поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно изобретению;
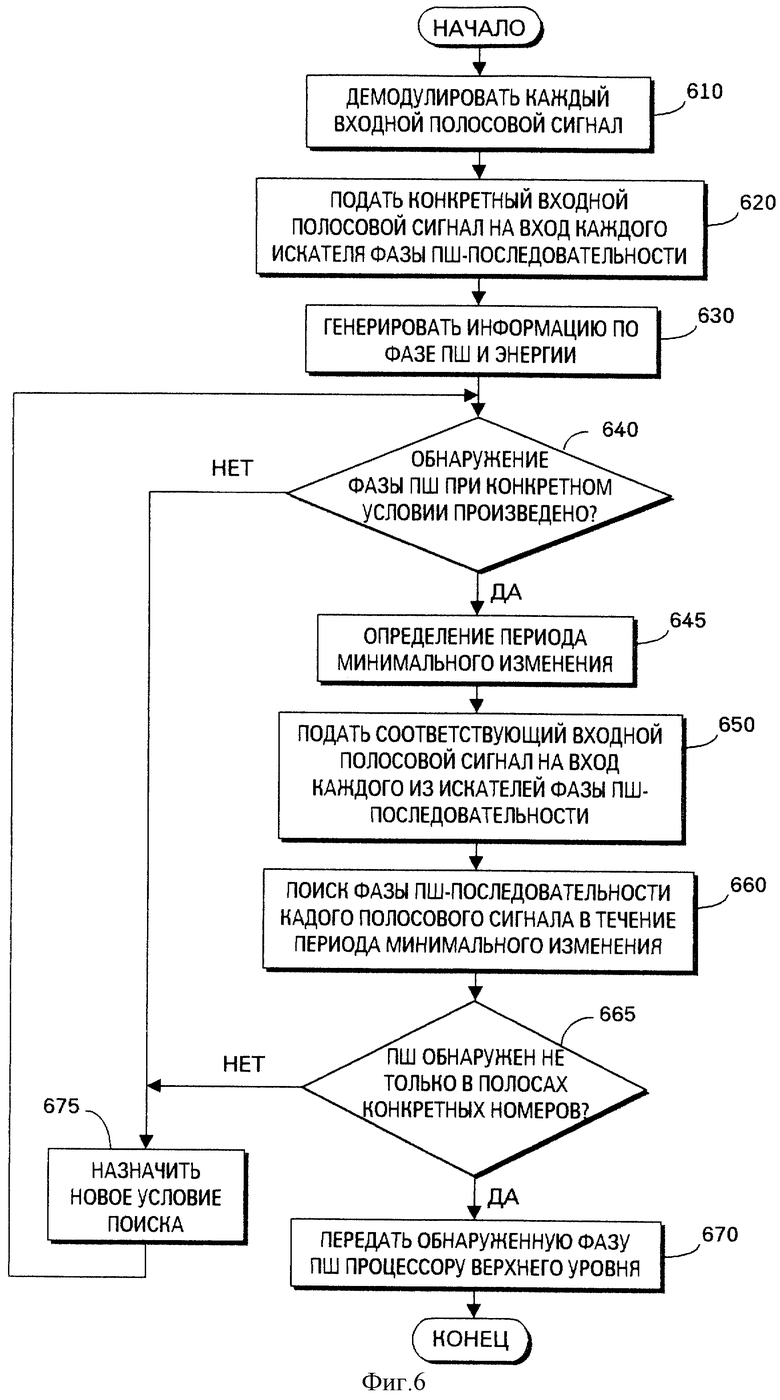
фиг. 6 представляет собой логическую схему, иллюстрирующую вариант реализации параллельного поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими;
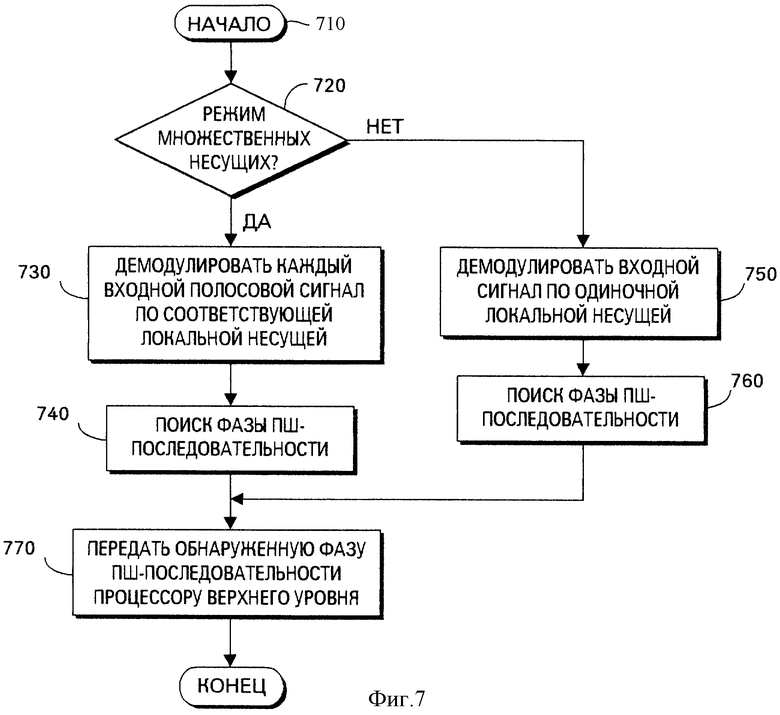
фиг. 7 представляет собой логическую схему, иллюстрирующую третий вариант реализации параллельного поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими;
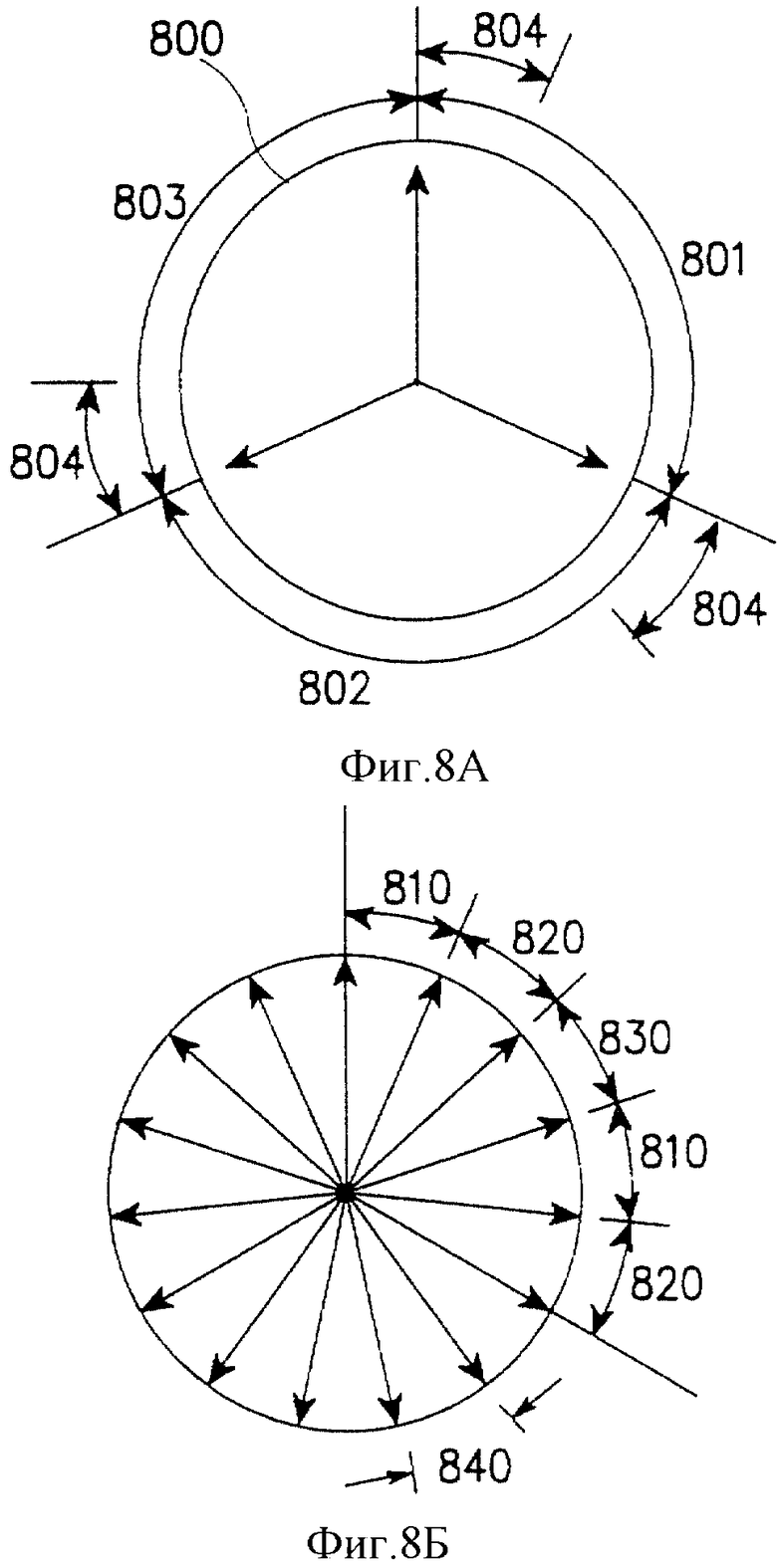
фиг. 8А иллюстрирует вариант различных начальных точек для искателей фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно изобретению;
фиг. 8Б иллюстрирует другой вариант различных начальных точек для искателей фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно изобретению;
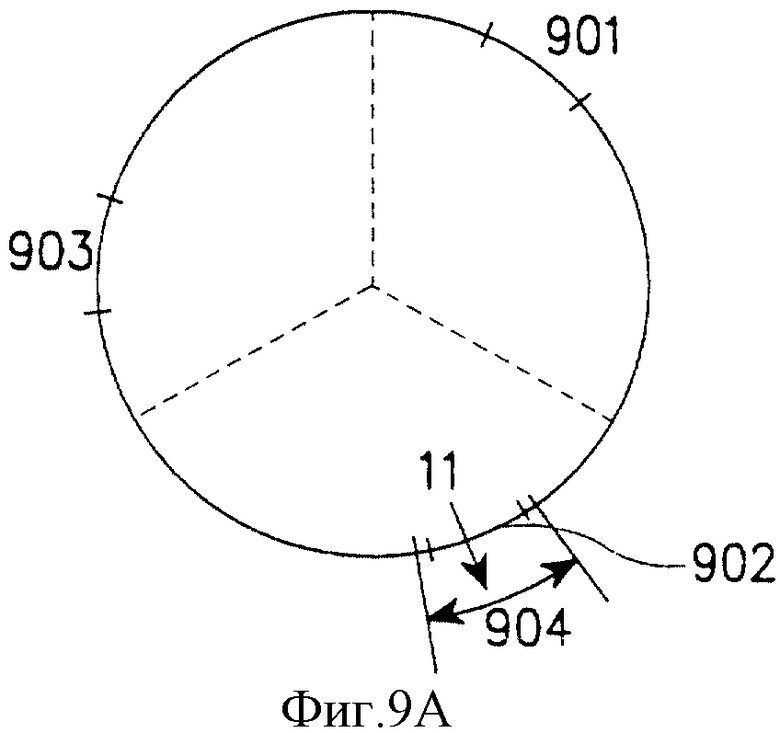
фиг. 9А и 9Б - первый вариант реализации поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно изобретению.
Подробное описание предпочтительных вариантов реализации изобретения
В системе мобильной связи МДКР с множественными несущими, где используется схема параллельного поиска ПШ-последовательности, совокупности искателей фазы ПШ-последовательности назначается один из двух сигналов, принимаемых в различных полосах, для поиска фазы ПШ-последовательности полосового сигнала с использованием различных условий поиска. В данном случае различные условия поиска могут включать в себя фазу, соответствующую начальной точке поиска и период поиска. Следовательно, каждый последовательный искатель фазы ПШ-последовательности может генерировать ПШ-последовательность и производить поиск фазы ПШ-последовательности с различных начальных точек поиска. Поэтому среднее время поиска ПШ-последовательности сокращается.
Для облегчения понимания настоящего изобретения изложим сначала идею круговой диаграммы ПШ. Передатчик, входящий в состав системы мобильной связи МДКР, до осуществления передачи умножает информационный сигнал на ПШ-последовательность, имеющую высокую скорость следования данных. Затем приемник входит в синхронизм с ПШ-последовательностью передатчика, умножает принятый сигнал на ПШ-последовательность для сжатия по спектру и восстанавливает информационный сигнал. Сигнал или символ канально-кодированных случайных данных ортогонально расширяется по спектру соответствующим ортогональным кодом для передачи данных и расширяется по спектру ПШ-последовательностью при скорости передачи 1.2288 МГц. Пилот-сигнал генерируется путем ортогонального расширения по спектру недемодулированного сигнала, представляющего собой все "+1", расширенного по спектру ортогональным кодом wо, и расширения по спектру ортогонально расширенного по спектру сигнала посредством ПШ-последовательности.
ПШ-последовательность может иметь период 215-1, и "1" или "-1" встречаются в ПШ-последовательности с одинаковой частотой. Каждая БС имеет уникальную начальную точку фазы ПШ-последовательности, и МС осуществляет поиск ПШ-последовательности пилот-сигнала с целью синхронизации с БС. ПШ-последовательность с периодом 32768 в общем случае выражается в виде круговой диаграммы ПШ.
На фиг. 3 показан вариант различных начальных точек поиска для N последовательных искателей фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими, согласно настоящему изобретению.
В данном случае каждая шкала на круговых диаграммах ПШ с 31 до 3N представляет фазу ПШ-последовательности, и интервал шкал соответствует длительности элемента ПШ. Стрелка на каждой круговой диаграмме ПШ указывает отдельную начальную точку поиска, иными словами, отдельную фазу ПШ-последовательности, назначенную каждому искателю фазы ПШ-последовательности. Каждая круговая диаграмма ПШ делится на N в соответствии с вариантами реализации настоящего изобретения.
На фиг. 4 показана блок-схема варианта реализации устройства поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению.
Демодулятор несущей 400 (фиг. 4) демодулирует входной сигнал, демодулированный по ВЧ-несущей. Умножители с 1-го по N-й 410, 412 и 414, входящие в состав демодулятора несущей 400, принимают сигналы, демодулированные по ВЧ-несущей, и умножают их на локальные несущие с 1-й по N-ю, тем самым демодулируя каждый из полосовых сигналов. Согласованные фильтры 416, 418 и 420, входящие в состав демодулятора несущей 400, восстанавливают формы волны демодулированных полосовых сигналов.
Искатели 430, 440 и 450 фазы ПШ-последовательности с 1-го по N-й, представленные на фиг. 1 или 2, производят поиск фаз ПШ-последовательности полосовых сигналов с 1-го по N-й в соответствии с различными условиями поиска, назначенными под управлением контроллера 460, и выдают информацию по фазам ПШ и энергиям. Различные условия поиска могут представлять собой фазы ПШ и периоды поиска, соответствующие различным начальным точкам поиска. Кроме того, искатели 430, 440 и 450 фазы ПШ-последовательности с 1-го по N-й могут осуществлять поиск фаз ПШ-последовательности с различных начальных точек поиска согласно различным условиям поиска.
Контроллер 460 управляет работой искателей 430, 440 и 450 фазы ПШ-последовательности с 1-го по N-й, управляя соответствующими условиями поиска и назначая их на основании информации по фазе ПШ и энергии, принятой от искателей 430, 440 и 450 фазы ПШ-последовательности с 1-го по N-й.
Контроллер 460 принимает информацию по фазе ПШ и энергии, назначает соответствующие условия поиска и определяет период минимального изменения фазы в рамках заданного алгоритма поиска фазы ПШ-последовательности. После этого все искатели фазы ПШ-последовательности совместно используют информацию по периоду минимального изменения фазы для поиска фазы ПШ-последовательности соответствующего входного полосового сигнала. Таким образом, искатели 430, 440 и 450 фазы ПШ-последовательности с 1-го по N-й выполняют индивидуальный поиск фазы ПШ-последовательности для каждого назначенного (соответствующего) входного полосового сигнала в течение периода минимального изменения фазы.
Если фаза ПШ обнаружена в период минимального изменения фазы, то контроллер 460 сообщает процессору верхнего уровня (не показан) об обнаружении фазы ПШ. Таким образом, МС (не показана) демодулирует синхроканал на следующих стадиях. После осуществления поиска фазы ПШ-последовательности контроллер 460 принимает от процессора верхнего уровня информацию по сдвигу соответствующего пилот-сигнала, управляет соответствующими условиями поиска, измеряет уровни пилот-сигналов, принятых от близлежащих БС, и сравнивает их с уровнем пилот-сигнала, обеспечиваемым текущим обслуживанием.
В том случае, когда максимальные энергии, принятые от искателей 430, 440 и 450 фазы ПШ-последовательности, удовлетворяют порогу, контроллер 460 назначает искателям фазы ПШ-последовательности, удовлетворяющим порогу, новые соответствующие условия поиска, которые включают в себя новый порог энергии, более высокий по сравнению с прежним порогом, порог частотной ошибки, вновь заданные размер окна поиска и начальную точку поиска, на основании фазы ПШ, соответствующей максимальной энергии, периода корреляции и т.д., и выполняет поиск фазы ПШ-последовательности с помощью новых условий поиска, и если максимальная энергия и частотная ошибка удовлетворяют соответствующим порогам, повторяет вышеописанный процесс заданное число раз в целях повышения стабильности и снижения вероятности ложных аварийных сигналов. При наличии фазы ПШ, удовлетворяющей всем условиям, контроллер 460 определяет период минимального изменения фазы согласно фазе ПШ и управляет периодом минимального изменения фазы, подлежащим совместному использованию всеми искателями фазы ПШ-последовательности. От стадии к стадии порог становится все точнее.
Если на какой-либо стадии максимальная энергия или частотная ошибка не удовлетворяет порогам, контроллер 460 назначает искателям 430, 440 и 450 фазы ПШ-последовательности, которые не удовлетворяют порогу, другое условие поиска, которое включает в себя другие размер окна поиска и начальную точку поиска и возобновляет поиск фазы ПШ.
Повысить стабильность и дополнительно снизить вероятность ложного аварийного сигнала можно за счет увеличения времени повторения поиска и использования контроллером надлежащих условий.
Хотя согласно варианту реализации, представленному на фиг. 4, каждый искатель фазы ПШ-последовательности осуществляет поиск фазы ПШ-последовательности соответствующего ему входного полосового сигнала до тех пор, пока не определен период минимального изменения фазы, это всего лишь иллюстративный вариант применения. Можно дополнительно предположить, что каждый искатель фазы ПШ-последовательности осуществляет поиск фазы ПШ-последовательности конкретного входного полосового сигнала в соответствии с отдельным условием поиска до тех пор, пока не определен период минимального изменения фазы. После определения периода минимального изменения фазы каждый искатель фазы ПШ-последовательности должен вновь произвести поиск фазы ПШ-последовательности соответствующего ему входного полосового сигнала.
На фиг. 5 показана блок-схема другого варианта реализации устройства поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению.
Демодулятор несущей 510 (фиг. 5) демодулирует сигнал, демодулированный по ВЧ-несущей. Искатели 530-550 и 1-го по N-й, конфигурация которых изображена на фиг. 1, производят поиск фазы ПШ-последовательности одного из полосовых сигналов с 1-го по N-й, принятых от коммутатора 520, в соответствии с различными условиями поиска и выдают информацию по фазам ПШ и энергиям. В данном случае различные условия поиска могут представлять собой фазы ПШ и периоды поиска, соответствующие начальным точкам поиска. Кроме того, искатели 530-550 фазы ПШ-последовательности с 1-го по N-й могут осуществлять поиск фазы ПШ-последовательности с различных начальных точек поиска согласно различным условиям поиска.
Контроллер 560 управляет работой искателей 530-550 фазы ПШ-последовательности с 1-го по N-й, управляя соответствующими условиями поиска и назначая их на основании информации по фазе ПШ и энергии, принятой от искателей 530-550 фазы ПШ-последовательности с 1-го по N-й.
Контроллер 560 принимает информацию по фазе ПШ и энергии, назначает соответствующие условия поиска и определяет период минимального изменения фазы в рамках заданного алгоритма поиска фазы ПШ-последовательности. После этого все искатели фазы ПШ-последовательности совместно используют информацию по периоду минимального изменения фазы для поиска фазы ПШ-последовательности соответствующего входного полосового сигнала. Таким образом, искатели 530-550 фазы ПШ-последовательности с 1-го по N-й выполняют поиск фазы ПШ-последовательности на соответствующих им полосовых сигналах в течение периода минимального изменения фазы.
Если фаза ПШ обнаружена в период минимального изменения фазы, то контроллер 560 сообщает процессору верхнего уровня (не показан) об обнаружении фазы ПШ. Таким образом, МС (не показана) демодулирует синхроканал и канал поискового вызова на следующих стадиях.
Коммутатор 520 коммутирует один из входных полосовых сигналов с 1-го по N-й на вход соответствующего искателя фазы ПШ-последовательности под управлением контроллера 560 до тех пор, пока не определен период минимального изменения фазы. После определения периода минимального изменения фазы коммутатор 520 коммутирует под управлением контроллера 560 входные полосовые сигналы с 1-го по N-й на входы соответствующих искателей с 1-го по N-й фазы ПШ-последовательности.
На фиг. 6 показан алгоритм поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению.
Демодулятор несущей 510 демодулирует на этапе 610 (фиг. 6) каждый входной полосовой сигнал, и коммутатор 520 коммутирует на этапе 620 конкретный входной полосовой сигнал на входы искателей 530-550 с 1-го по N-й фазы ПШ-последовательности. На этапе 630 все искатели фазы ПШ-последовательности производят поиск фазы ПШ-последовательности конкретного полосового сигнала в соответствии с различными условиями поиска, назначенными контроллером 560, и выдают информацию по фазе ПШ и энергии. Контроллер 560 определяет на этапе 645 период минимального изменения фазы, и на этапе 650 коммутатор 520 под управлением контроллера 560 коммутирует входные полосовые сигналы с 1-го по N-й на входы соответствующих искателей 530-550 фазы ПШ-сигнала с 1-го по N-й. На этапе 660 каждый искатель фазы ПШ-последовательности производит в течение минимального изменения фазы поиск фазы ПШ-последовательности соответствующего ему полосового сигнала согласно назначенному контроллером 560 условию поиска, соответствующему периоду минимального изменения фазы. Контроллер 560 передает на этапе 670 процессору верхнего уровня информацию по обнаруженной фазе ПШ в каждой полосе.
Система мобильной связи МДКР с множественными несущими должна поддерживать совместимость с общепринятой системой мобильной связи МДКР с одиночной несущей. Например, пользователь может переключать режим работы МС в соответствии с текущим типом обслуживания, поддерживаемым системой, в соответствии с тем, поддерживается ли режим множественных несущих или одиночной несущей. Если МС, установленная в режим множественных несущих, перемещается в область обслуживания, поддерживающего режим одиночной несущей, или в этой области обслуживания включается питание, то МС автоматически переключается в режим одиночной несущей.
Поэтому аппаратура параллельного поиска фазы ПШ-последовательности должна также производить поиск фазы ПШ-последовательности на сигнале с одиночной несущей или в одиночной полосе. Если все искатели фазы ПШ-последовательности осуществляют поиск фазы ПШ-последовательности одиночного полосового сигнала с различных начальных точек поиска, время, необходимое для поиска ПШ-последовательности, сокращается.
На фиг. 7 показан алгоритм третьего варианта реализации поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими.
Если на этапе 710 (фиг. 5 и 7) производится включение питания МС, то контроллер 460 на этапе 720 определяет, установлена ли МС в режим множественных несущих или в режим одиночной несущей. Определение можно производить на основании информации по режиму работы МС, принятой от процессора верхнего уровня, или информации о наличии или отсутствии необходимости переключения в другой режим.
В режиме множественных несущих демодулятор несущей 400 под управлением контроллера 460 или процессора верхнего уровня демодулирует на этапе 750 принятый сигнал по одиночной локальной несущей. Затем одиночный полосовой сигнал поступает на вход каждого искателя фазы ПШ-последовательности. На этапе 760 все искатели фазы ПШ-последовательности под управлением контроллера 460 производят поиск фазы ПШ-последовательности одиночного полосового сигнала с разных начальных точек поиска. Контроллер 460 передает на этапе 770 обнаруженную информацию по соответствующей фазе ПШ процессору верхнего уровня.
На фиг. 8А показан пример различных точек поиска для искателей фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению.
На фиг. 8А показана круговая диаграмма ПШ 800 для трех искателей фазы ПШ-последовательности 801, 802 и 803. Круговая диаграмма ПШ 800 делится на три сегмента, и каждому искателю фазы ПШ-последовательности назначается соответствующая начальная точка поиска. Каждый искатель фазы ПШ-последовательности принимает одиночный полосовой сигнал и осуществляет поиск фазы ПШ-последовательности одиночного полосового сигнала путем установки окна поиска 804 от соответствующей начальной точки поиска.
На фиг. 8Б показан другой вариант различных точек поиска для искателей фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению.
Если предположить, что количество искателей фазы ПШ-последовательности равно трем, круговая диаграмма ПШ, иными словами ПШ-последовательность, делится на заданные периоды поиска 840, начинающиеся с ПШ-сдвига "0", а затем разделенные периоды поиска последовательно назначаются искателям фазы ПШ-последовательности 810, 820 и 830.
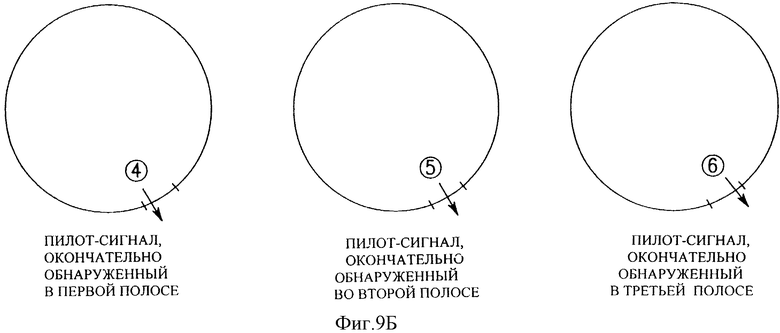
На фиг. 9А и 9Б показан первый вариант реализации поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению.
На фиг. 9А информация по фазе ПШ и энергии, соответствующая периоду минимального изменения фазы, обозначенному номером 11, выводится в то время, как каждый искатель фазы ПШ-последовательности, первый, второй и третий, соответственно 901, 902 и 903, осуществляют поиск конкретного полосового сигнала, например второго полосового сигнала в соответствии с отдельным условием, и контроллер определяет период минимального изменения фазы.
На фиг. 9Б контроллер определяет период минимального изменения фазы и предоставляет информацию по периоду минимального изменения фазы искателям фазы ПШ-последовательности с первого по третий, так что искатели фазы ПШ-последовательности с первого по третий осуществляют поиск фаз ПШ-последовательности соответствующих им полосовых сигналов. Фазы ПШ 4, 5 и 6 (фиг. 9Б) представляют собой окончательные фазы, обнаруженные в каждом полосовом сигнале и используемые при дальнейшей демодуляции синхроканала.
В описанной выше системе мобильной связи МДКР с множественными несущими согласно настоящему изобретению все искатели фазы ПШ-последовательности осуществляют поиск фазы ПШ-последовательности входного полосового сигнала в соответствии с различными условиями поиска, после чего определяется период минимального изменения фазы. Поэтому среднее время поиска фазы ПШ-последовательности сокращается. Поскольку большую часть времени занимает выполнение исходной стадии поиска фазы ПШ-последовательности, время поиска фазы ПШ-последовательности можно снизить в два или три раза относительно общепринятого времени поиска. Кроме того, сокращается время вхождения в синхронизм с фазой ПШ и восстановления вызова при включении питания МС или при сбросе вызова.
После того как определен период минимального изменения фазы, поиск фазы ПШ-последовательности вновь осуществляется на каждом полосовом сигнале. Поэтому поиск стабильной фазы ПШ-последовательности можно осуществлять при сниженной вероятности ложного аварийного сигнала на всех входных полосовых сигналах, которые проявляют различное влияние замирания и различные характеристики многолучевого распространения.
В устройстве поиска фазы ПШ-последовательности в системе мобильной связи МДКР с множественными несущими по меньшей мере два искателя фазы ПШ-последовательности осуществляют поиск фазы ПШ-последовательности одного из по меньшей мере двух различных входных полосовых сигналов с использованием различных назначенных условий поиска и выдают информацию по фазе ПШ и энергии. Контроллер назначает искателям фазы ПШ-последовательности различные условия поиска и на основании информации по фазе ПШ и энергии, принятой от искателей фазы ПШ-последовательности, определяет период минимального изменения фазы. Технический результат - сокращение времени поиска фазы ПШ-последовательности. 3 с. и 17 з.п. ф-лы, 11 ил.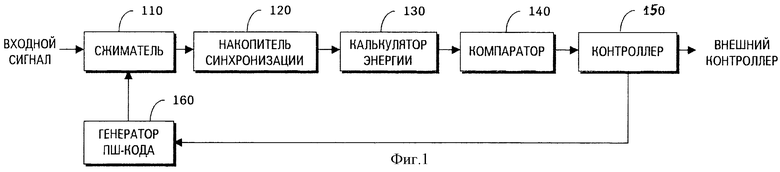
| US 4550414, 29.10.1985 | |||
| Многоканальное устройство для передачи данных | 1977 |
|
SU661831A1 |
| US 5737362 А, 07.04.1998 | |||
| US 5521937 А, 28.05.1998 | |||
| СПОСОБ СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 1990 |
|
RU2011302C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1981 |
|
RU2042270C1 |

