Настоящее изобретение относится к системе связи множественного доступа с кодовым разделением каналов (МДКР) и, более конкретно, к системе и способу распределения различных частотных полос и частот следования элементов сигнала для прямого и обратного каналов трактов связи.
Уровень техники
Один из видов систем сотовой связи использует технологию, известную как МДКР (множественный доступ с кодовым разделением каналов). В системе такого вида пользователи различаются один от другого с помощью уникальных кодов, назначенных им, в то же время совместно используя одну и ту же полосу частот в одно и то же время. МДКР преобразует информацию, которая должна быть передана, в сигнал расширенного спектра путем умножения этой информации на псевдослучайное число (ПСЧ). Посредством этого расширяют спектр. Псевдослучайное число есть цифровая часть данных, которая фактически оказывается совершенно случайной. Это ПСЧ синхронизируется с системой в подвижной станции МДКР с помощью пилотной несущей, посылаемой из базовой станции. Частота, с которой генерируется ПСЧ-последовательность, известна как частота следования элементарных посылок ПСЧ. Более подробное описание МДКР и различий между МДКР, МДРВ (множественный доступ с разделением по времени) и МДРЧ (множественный доступ с разделением по частоте) можно найти, например, в работе "Множественный доступ с Кодовым Разделением", Связь, февраль 1990 г., Фреда Баумгартнера, которая включена в настоящее описание посредством ссылки.
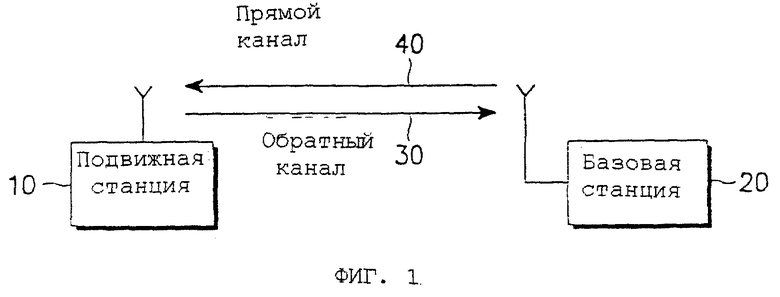
На фиг. 1 схематически представлена система связи на основе МДКР, содержащая подвижную станцию 10, базовую станцию 20, обратный канала 30 связи, который представляет собой канал связи на электромагнитной волне, передаваемой от подвижной станции 10 к базовой станции 20, и прямой канал 40 связи, который представляет собой канал связи на электромагнитной волне, передаваемой от базовой станции 20 к подвижной станции 10.
Используемые в настоящее время в радиосвязи подвижные станции имеют симметричную ширину полос частот прямого и обратного каналов и соответственно симметричные частоты следования элементов сигнала. Термин "симметричный" означает, что ширина полосы частот для прямого и обратного каналов одна и та же и что частоты следования элементов сигнала в прямом и обратном направлениях одинаковы. Стандарт МДКР, III-МДКР был предложен в последнее время, чтобы приспособить обслуживание связи высокоскоростными данными (ВД) к радио или беспроводному каналу связи. Обслуживание ВД может включать в себя различные применения, такие как доступ в Интернет, служба электронной почты, средства мультимедиа, где требуется большая производительность для прямого канала, чем для обратного канала, и т.д. Многие из этих служб, такие как средства мультимедиа, требуют асимметричной ширины полос частот для прямого и обратного направлений. Термин "асимметричный" означает, что частоты следования элементов сигнала ПСЧ в прямом и обратном каналах связи отличаются друг от друга.
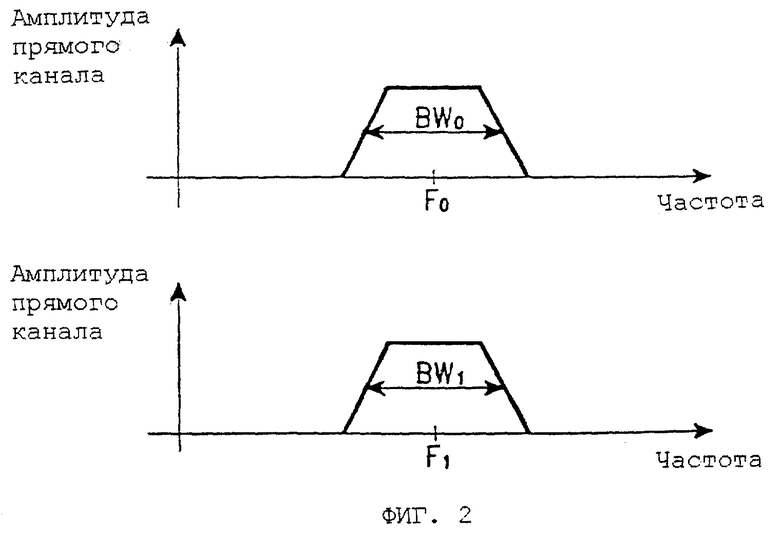
В соответствующих системах связи на основе МДКР все подвижные станции имеют симметричную ширину полос частот для прямого и обратного каналов связи. Процедура установления соединения вызова между подвижной станцией и базовой станцией выполняется по симметричному прямому и обратному каналу. После того как процедура установления соединения вызова завершена, соединение вызова поддерживается на том же прямом/обратном канале. На фиг. 2 представлено асимметричное распределение каналов для прямого и обратного каналов, где F0 (частота прямого канала связи) не равна F1 (частоте обратного канала связи), а BW0 (полоса частот прямого канала связи) равна BW1 (полосе частот обратного канала связи). Как установление, так и поддержание соединения вызова выполняются в диапазоне частот F0, F1.
Существует необходимость в обеспечении для подвижных станций наличия обслуживания связи с высокой скоростью передачи данных путем поддержания асимметричного распределения прямого и обратного каналов.
Сущность изобретения
В соответствии с настоящим изобретением обеспечена система и способ асимметричного распределения прямого и обратного каналов в системе связи на основе МДКР. В соответствии с настоящим изобретением обеспечена система и способ асимметричного распределения полос частот и частот следования элементов сигнала прямого и обратного каналов.
В соответствии с настоящим изобретением также обеспечен процесс согласования между подвижной станцией и базовой станцией для выбора оптимальной полосы частот, которая должна быть использована подвижной станцией для приема информации, передаваемой базовой станцией.
Кроме того, в соответствии с настоящим изобретением обеспечена система множественного доступа с кодовым разделением каналов, содержащая базовую станцию, обеспечивающую поддержание базовой частоты следования элементов сигнала, частоты следования элементов по прямому каналу связи и частоты следования элементов сигнала обратного канала связи, и подвижную станцию, находящуюся на связи с базовой станцией, причем подвижная станция поддерживает связь с базовой станцией так, чтобы независимо регулировать значения частоты следования элементов сигнала прямого канала и частоты следования элементов сигнала обратного канала. Частота следования элементов сигнала прямого канала может быть меньше или равна максимальной прямой величине, разрешенной базовой станцией. Частота следования элементов сигнала обратного канала может быть меньше или равна максимальной обратной величине, разрешенной базовой станцией. Кроме того, частота следования элементов сигнала прямого канала, частота следования элементов сигнала обратного канала и базовая частота следования элементов сигнала могут быть равны друг другу. Базовая станция может передавать максимальные прямые и/или обратные значения к подвижной станции. Дополнительно, частота следования элементов сигнала прямого канала может быть меньше или равна максимальной прямой величине, разрешенной подвижной станцией. Кроме того, частота следования элементов сигнала обратного канала может быть меньше или равна максимальной обратной величине, разрешенной подвижной станцией. В любом случае, подвижная станция может передавать максимальную прямую и/или обратную величину к базовой станции.
В соответствии с настоящим изобретением также обеспечен способ работы системы МДКР, содержащий этапы установления соединения вызова с базовой станции, обеспечивающей поддержание базовой частоты следования элементов сигнала, максимальную частоту следования элементов сигнала прямого канала и максимальную частоту следования элементов сигнала обратного канала путем передачи поискового вызова на базовую станцию от подвижной станции, запроса у базовой станции подвижной станцией желаемой частоты следования элементов сигнала прямого канала, передачи от базовой станции на подвижную станцию максимальной частоты следования элементов сигнала прямого канала, передачи на базовую станцию от подвижной станции скорректированной частоты следования элементов сигнала прямого канала, передачи начального сообщения на подвижную станцию от базовой станции и поддержания связи с базовой станцией, используя скорректированную частоту следования элементов сигнала прямого канала. При использовании этого способа скорректированная частота следования элементов сигнала прямого канала связи может быть равна базовой частоте следования элементов сигнала. Кроме того, скорректированная частота следования элементов сигнала прямого канала связи может быть равна максимальной частоте следования элементов сигнала прямого канала связи.
Кроме того, способ работы системы МДКР может дополнительно содержать этапы запроса у базовой станции подвижной станцией желаемой частоты следования элементов сигнала обратного канала связи, передачи к подвижной станции от базовой станции максимальной частоты следования элементов сигнала обратного канала связи, передачи скорректированной частоты следования элементов сигнала обратного канала связи от подвижной станции к базовой станции и связи с базовой станцией, используя скорректированную частоту следования элементов сигнала обратного канала связи. В этом случае скорректированная частота следования элементов сигнала обратного канала связи может быть равна базовой частоте следования элементов сигнала. Кроме того, максимальная частота следования элементов сигнала обратного канала связи может быть равна базовой частоте следования элементов сигнала. Базовая частота следования элементов сигнала также может быть равна скорректированной частоте следования элементов сигнала прямого канала связи и скорректированной частоте следования элементов сигнала обратного канала связи. Базовая частота следования элементов сигнала также может быть равна максимальной частоте следования элементов сигнала прямого канала связи и максимальной частоте следования элементов сигнала обратного канала связи.
В соответствии с настоящим изобретением также обеспечен способ работы системы МДКР, содержащий этапы установления соединения вызова с подвижной станцией, поддерживающей базовую частоту следования элементов сигнала, максимальную частоту следования элементов сигнала в прямом канале связи и максимальную частоту следования элементов сигнала в обратном канале связи путем выполнения базовой станцией поискового вызова на подвижную станцию, запроса базовой станцией у подвижной станции желаемой частоты следования элементов сигнала в прямом канале связи, передачи к базовой станции от подвижной станции максимальной частоты следования элементов сигнала прямого канала связи, передачи к подвижной станции от базовой станции скорректированной частоты следования элементов сигнала прямого канала связи, передачи начального сообщения к базовой станции от подвижной станции и связи с подвижной станцией, используя скорректированную частоту следования элементов сигнала прямого канала связи. Скорректированная частота следования элементов сигнала прямого канала связи может быть равна базовой частоте следования элементов сигнала и/или может быть равна максимальной частоте следования элементов сигнала прямого канала. Этот способ может дополнительно содержать этапы запроса у подвижной станции базовой станцией желаемой частоты следования элементов сигнала обратного канала связи, передачи базовой станции от подвижной станции максимальной частоты следования элементов сигнала обратного канала связи, передачи подвижной станции от базовой станции скорректированной частоты следования элементов сигнала обратного канала связи и связи с подвижной станцией, используя скорректированную частоту следования элементов сигнала обратного канала связи. В этом случае базовая частота следования элементов сигнала может быть равна скорректированной частоте следования элементов сигнала обратного канала связи и/или максимальной частоте следования элементов сигнала обратного канала связи. Кроме того, базовая частота следования элементов сигнал может быть равна скорректированной частоте следования элементов сигнала прямого канала связи и скорректированной частоте следования элементов обратного канала связи, и/или максимальной частоте следования элементов сигнала прямого канала связи и максимальной частоте следования элементов сигнала обратного канала связи.
Одним из преимуществ настоящего изобретения является повышенная гибкость при распределении частот в базовой станции.
Другим преимуществом настоящего изобретения является возможность адаптирования служб асимметричных высокоскоростных данных, таких как мультимедийные приложения радиосвязи.
Настоящее изобретение также обеспечивает преимущество, заключающееся в повышенной эффективности использования частоты.
Фиг. 1 - система связи на базе МДКР, известная из уровня техники;
Фиг. 2 - график зависимости амплитуды от частоты прямого и обратного каналов, имеющих симметричные полосы частот;
Фиг. 3 - схема типовой сети связи на базе МДКР в соответствии с настоящим изобретением;
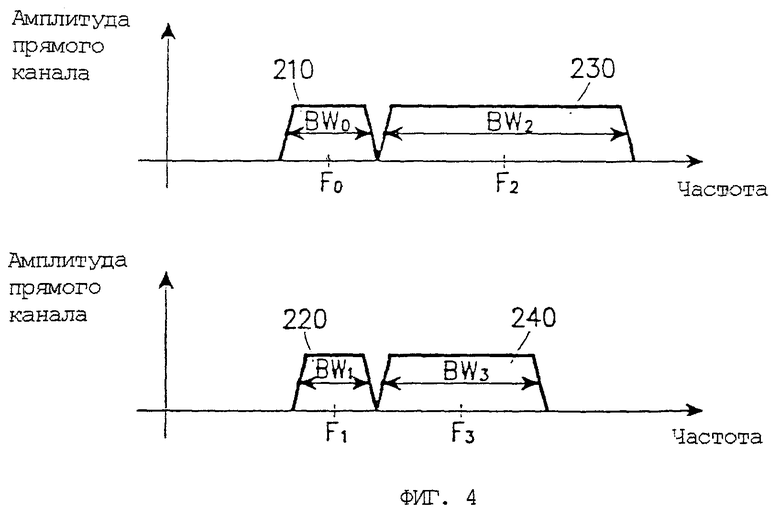
Фиг. 4 - график зависимости амплитуды от частоты распределений частот прямого и обратного каналов в течение и после процедуры установления соединения вызова согласно настоящему изобретению;
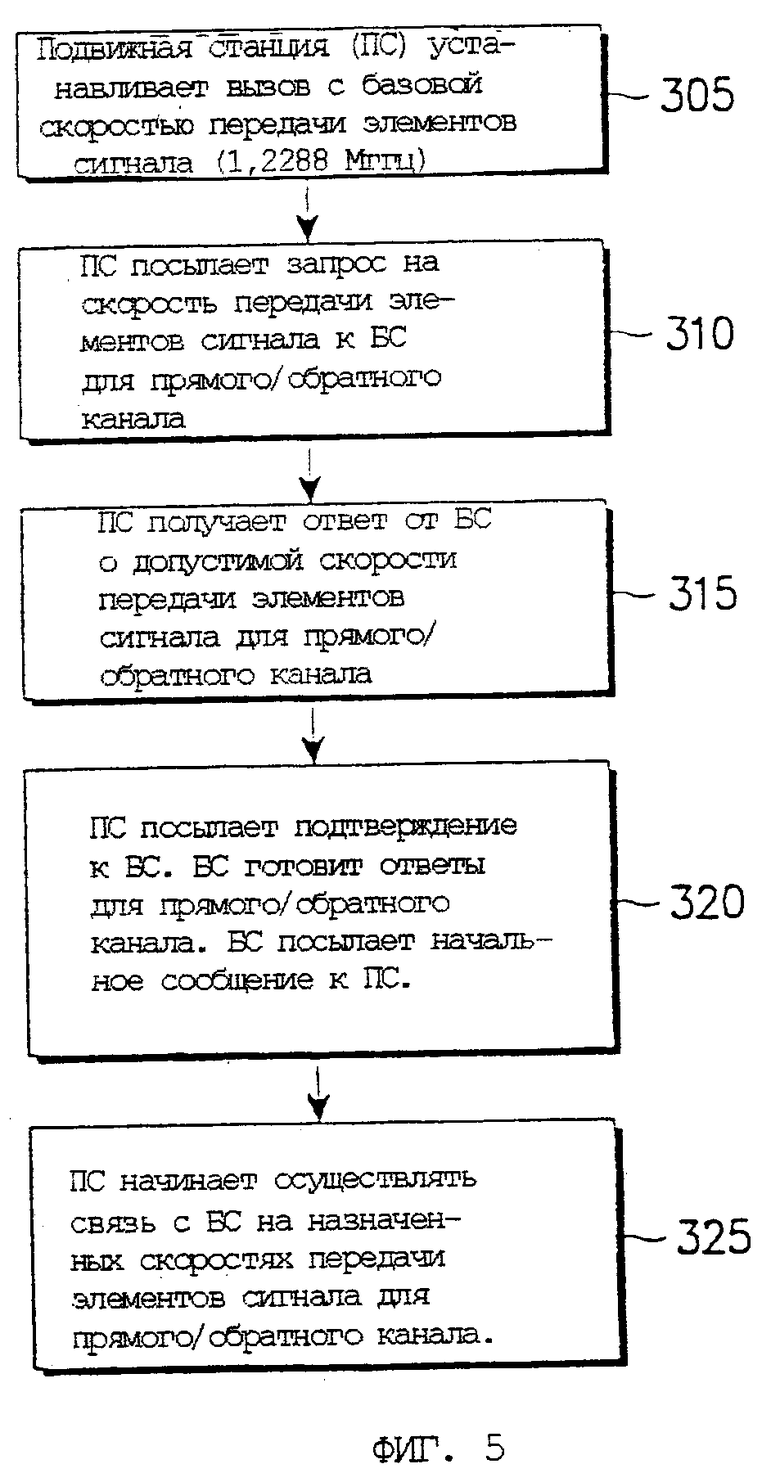
Фиг. 5 - блок-схема процесса согласования частоты следования элементов сигнала полосы частот, согласно настоящему изобретению.
Типовая телефонная система, в которой осуществлено настоящее изобретение, представлена на фиг. 3. Эта система использует технику модуляции МДКР для связи между подвижными станциями, блоками или телефонами системы и центральными пунктами сотов или базовыми станциями. Сотовые системы в больших городах могут иметь сотни станций центральных пунктов сотов, обслуживающие сотни тысяч подвижных телефонов. Использование техники МДКР существенно способствует увеличению количества пользователей в системах такого размера по сравнению с обычными сотовыми системами частотной модуляции.
На фиг. 3 контроллер 110 и коммутатор системы, который также называют центром коммутации подвижных телефонов (ЦКПТ), обычно содержит интерфейс и схему обработки для обеспечения системного управления центральным пунктом сотов или базовыми станциями. Контроллер 110 также управляет маршрутизацией телефонных вызовов от коммутируемой телефонной сети общего пользования (КТСОП) к соответствующей базовой станции для передачи к соответствующей подвижной станции. Контроллер 110 также управляет маршрутизацией вызовов от подвижной станции через по меньшей мере одну базовую станцию к КТСОП. Контроллер 100 может направлять вызовы к пользователям подвижной связи через соответствующие базовые станции, поскольку такие подвижные станции обычно не связываются непосредственно друг с другом.
Контроллер 110 может быть присоединен к базовым станциям с помощью различных средств, таких как выделенные телефонные линии, оптоволоконные каналы связи или СВЧ-каналы связи. Следует принять во внимание, что контроллер 110 и коммутатор системы может быть объединен с любым количеством базовых станций. На фиг. 3 представлены три такие типовые базовые станции 112, 114 и 116 вместе с типовой подвижной станцией 118, которая содержит сотовый телефон. Стрелки 120a - 120b обозначают каналы связи между базовой станцией 112 и подвижной станцией 118. Стрелки 122a - 122b обозначают каналы связи между базовой станцией 114 и подвижной станцией 118. Подобным образом, стрелки 124a - 124b обозначают каналы связи между базовой станцией 116 и подвижной станцией 118.
Области обслуживания центрального пункта сота или базовой станции или соты спроектированы географически так, чтобы подвижная станция обычно находилась ближе всего к одному сотовому пункту. Когда подвижная станция находится в ожидании, т.е. когда нет обслуживания вызовов, подвижная станция постоянно контролирует передачи пилотного сигнала от ближайшей базовой станции. Как показано на фиг. 3, пилотные сигналы соответственно передаются к подвижной станции 118 базовыми станциями 112, 114 и 116 соответственно на прямых каналах связи 120b, 122b и 124b. Подвижная станция затем определяет, в каком соте она находится, сравнивая уровни пилотных сигналов, передаваемых от этих конкретных сотовых пунктов.
В примере, представленном на фиг. 3, подвижная станция 118 может считаться находящейся ближе всего к базовой станции 116. Когда подвижная станция 118 инициирует вызов, управляющее сообщение передается к ближайшей базовой станции - базовой станции 116. Базовая станция 116 после получения сообщения запроса на вызов сигнализирует системному контроллеру 110 и передает номер вызова. Контроллер системы 110 затем соединяет вызов через КТСОП с требуемым приемником.
Согласно этому изобретению подвижные станции для обслуживания высокоскоростными данными должны поддерживать асимметричную сущность этого обслуживания. Другими словами, эти подвижные станции должны поддерживать асимметричность прямого и обратного каналов связи путем регулирования частот следования элементов сигнала подвижной станции. Частоты следования элементов сигнала подвижной станции могут быть скорректированы путем изменения частоты генератора ПСЧ-последовательности. Более подробное описание компонентов подвижной станции приведено в Стандарте TIA/EIA/IS-95A (включенном в настоящее описание посредством ссылки). Установка асимметричными прямого и обратного каналов в соответствии с настоящим изобретением включает в себя использование симметричных прямого и обратного каналов как частный случай. Чтобы соответствовать стандарту III-МДКР, ширина полосы частот для прямого и обратного каналов может иметь величины, равные целым кратным значениям базовой ширины полосы частот. Например, базовая ширина полосы частот систем МДКР на основе IS-95 обычно равна 1,2288 МГц. Для таких операций, как процедура мягкой передачи обслуживания, подвижные станции могут использовать комбинацию прямого/обратного канала, имеющего, например, ширину полосы пропускания, равную 1,2288 МГц.
На фиг. 4, представляющей пример асимметричного распределения каналов, показан график распределения канала согласно настоящему изобретению как во время процедуры установления вызова, так и после нее. Ширина полосы частот для полос 210 (ширина полосы частот прямого канала - симметричная) и 220 (ширина полосы частот обратного канала - симметричная) частот, которые центрированы на частотах F0 (начальная частота прямого канала связи) и F1 (начальная частота обратного канала связи), одинаковы. Ширина полосы частот для полос 230 (ширина полосы частот прямого канала - асимметричная) и 240 (ширина полосы частот обратного канала - асимметричная) частот, которые центрированы на частотах F2 (скорректированная частота прямого канала связи) и F3 (скорректированная частота обратного канала связи), могут быть разными, т. е. асимметричны. Процедура установления вызова может быть выполнена через полосы 210 и 220 частот, чтобы согласовать ширину полосы частот прямого/обратного канала после установления вызова. Частота следования элементов сигнала для каждого направления (обратного и прямого) согласовывается между базовой станцией и подвижной станцией на полосах 210 и 220 частот. Подвижная станция выбирает максимальную частоту следования элементов сигнала, доступную для каждого направления, в котором выбранная частота поддерживается подвижной станцией. Подвижная станция затем устанавливает выбранную частоту для обоих направлений для полос 230 (асимметричная ширина полосы частот прямого канала связи) и 240 (асимметричная ширина полосы частот обратного канала связи частот. Процесс согласования выполняется на полосах 210 и 220. В конце согласования подвижная станция передает вызов с полос 210 и 220 частот на полосы 230 и 240 частот. После этой операции передачи вызов поддерживается на полосах 230 и 240 частот. Если базовая станция поддерживает только базовую частоту следования элементов сигнала (не изменяемую), тогда вызов должен поддерживаться на первой паре полос 210 и 220 частот.
На фиг. 5 представлена блок-схема процесса согласования частот следования элементов сигнала/ширины полосы частот. На этапе 305 подвижная станция устанавливает соединение вызова с базовой частотой следования элементов сигнала, такой как 1,2288 МГц. На этапе 310 подвижная станция (ПС) посылает запрос к базовой станции (БС) на частоту следования элементов сигнала для прямого и обратного каналов. На этапе 315 ПС принимает ответ от БС с информацией о допустимых частотах следования элементов сигнала для прямого и обратного каналов. На этапе 320 ПС посылает сообщение подтверждения на БС. БС также подготавливает ресурсы для скорректированных частот следования элементов сигнала прямого и обратного каналов и посылает начальное сообщение к ПС. На этапе 325 ПС начинает поддерживать связь с БС на вновь назначенной частоте следования элементов сигнала для прямого и обратного каналов.
Очевидным является, что в настоящем изобретении могут быть выполнены различные изменения, замены и модификации без изменения его сущности, как она изложена в нижеследующей формуле изобретения.
В системе связи на основе МДКР система и способ распределения ширины полосы частот канала и частот следования элементов сигнала поддерживают асимметричную ширину полосы частот и частоты следования элементов сигнала для прямого и обратного каналов. Система и способ содержат процесс согласования между подвижной станцией и базовой станцией для выбора частоты следования элементов сигнала и ширины полос частот для использования в прямом и обратном каналах. Техническим результатом является необходимость в обеспечении для подвижных станций наличия обслуживания связи с высокой скоростью передачи данных путем поддержания асимметричного распределения прямого и обратного каналов. 3 с. и 24 з.п.ф-лы, 5 ил.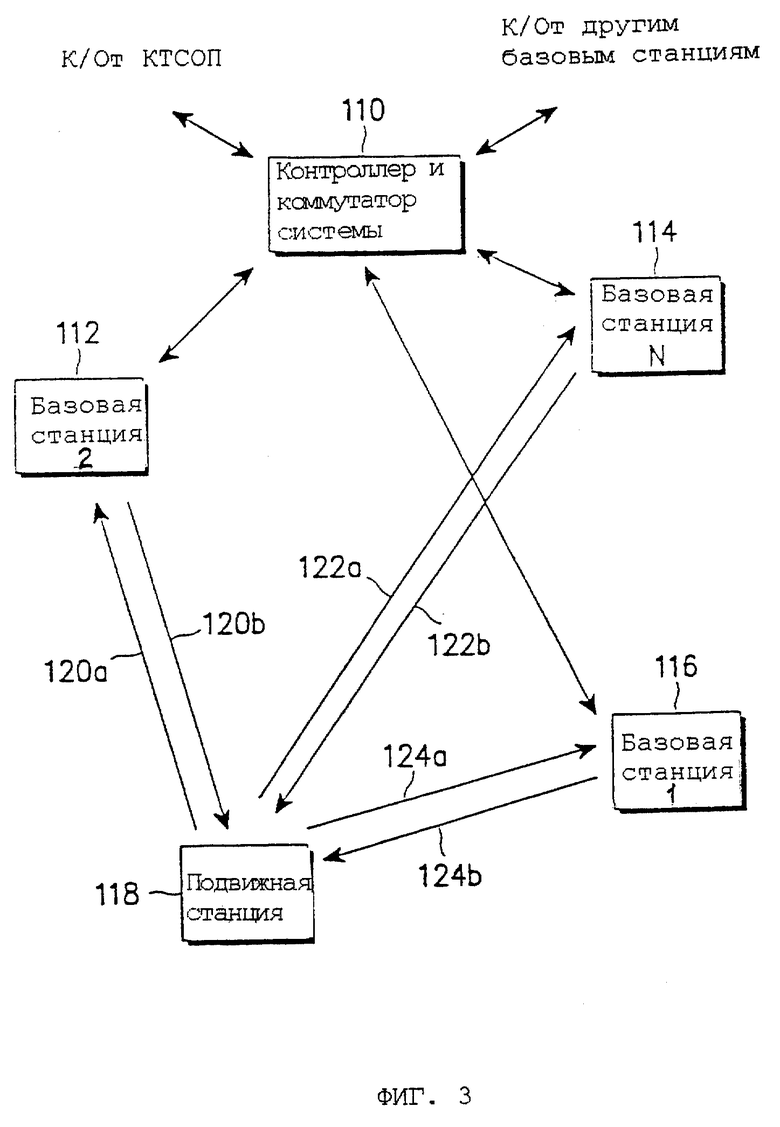
| US 5365550 A, 15.11.1994 | |||
| Система дуплексной радиосвязи | 1981 |
|
SU1084999A1 |
| US 5452327 A, 19.05.1995 | |||
| US 4901307 A, 13.02.1990 | |||
| Чувствительный элемент самогенерирующего квантового магнитометра с оптической ориентацией метастабильных атомов гелия | 1975 |
|
SU528522A1 |
