Изобретение относится к системам связи множественного доступа с кодовым разделением каналов МДКР, и более конкретно, к системе и способу управления мощностью прямого канала связи от базовой станции к подвижной станции.
Уровень техники
Один из типов систем сотовой связи использует технологию, известную как МДКР (множественный доступ с кодовым разделением каналов). В системе такого типа пользователи различаются один от другого с помощью уникальных кодов, назначенных им, в то же время совместно используя одну и ту же полосу частот в одно и то же время. Поскольку все пользователи используют одну и ту же полосу частот, они создают помехи друг другу. Уровень этих помех должен контролироваться, чтобы обеспечить необходимое качество обслуживания, чтобы обеспечить частоту появления ошибок ниже приемлемого уровня. Более подробное описание МДКР и различий между МДКР, МДРВ (множественный доступ с разделением по времени) и МДРИ (множественный доступ с разделением по частоте) приведено в работе "Множественный Доступ с Кодовым Разделением Каналов", "Связь", февраль 1990 г., Фреда Баумгартнера, которая включена в настоящее описание посредством ссылки.
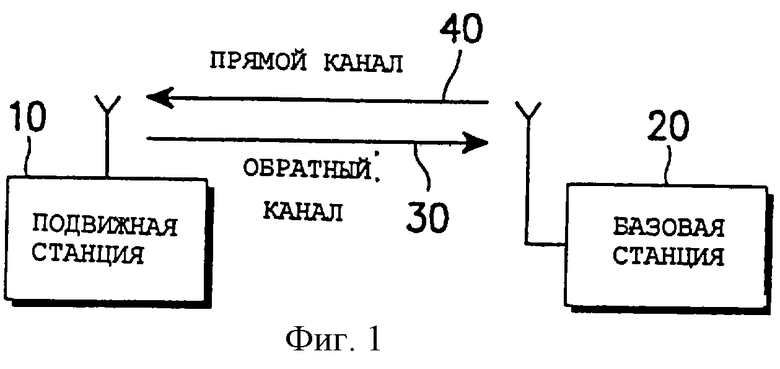
На фиг.1 схематически представлена система связи на основе МДКР, содержащая подвижную станцию 10, базовую станцию 20, обратный канал 30, который представляет собой канал связи на электромагнитной волне, передаваемой от подвижной станции 10 к базовой станции 20, и прямой канал 40, который представляет собой канал связи на электромагнитной волне, передаваемой от базовой станции 20 к подвижной станции 10.
Один из способов управления уровнем помех в системе связи на основе МДКР является управление мощностью, в соответствии с которым мощность, передаваемую от подвижной станции 10 к базовой станции 20 (обратный канал), или от базовой станции 20 к подвижной станции 10 (прямой канал), контролируют или изменяют. Управление мощностью обратного канала связи требуется из-за так называемой проблемы "ближний/дальний". Эта проблема возникает, когда подвижная станция вблизи базовой станции испытывает сравнительно низкие потери мощности при распространении, и таким образом, базовая станция обнаруживает очень высокий уровень сигнала от этой подвижной станции, в то время как подвижная станция, расположенная дальше, подвержена сравнительно высоким потерям распространения, и таким образом, мощность, обнаруживаемая базовой станцией от этой подвижной станции, очень мала. Управление мощностью для обратного канала, таким образом, используют, чтобы дать команду близлежащим или удаленным подвижным станциям уменьшить или увеличить мощность передачи к базовой станции, как это известно из уровня техники.
В связи с изменчивостью условий распространения радиоволн по мере продвижения подвижных станций скорость обновления команд управления мощностью должна быть относительно большой. Частота, с которой происходит обновление команд управления мощностью, в существующих системах IS-95 на основе МДКР равна 800 герц. В ранее использовавшихся системах связи на основе МДКР считалось, что управление мощностью для прямого канала связи не столь критично, как для обратного канала связи, и применялась сравнительно медленная схема обновления команд управления мощностью (обычно, меньше чем 1 герц). В современных ПСС (персональных системах связи) стандарта J-STD-008 схема обновления команд управления мощностью на прямом канале связи была адаптирована, что позволяет иметь частоту обновления 50 герц. Явление, имеющее место при распространении электромагнитной волны, известное как быстрое замирание, не может быть адекватно отрегулировано схемой изменения управления мощностью прямого канала, действующей на сравнительно низких частотах, таких как меньшие, чем 50 гц. Это приводит к необходимости использования прямых каналов графика сравнительно большой мощности, чтобы уменьшить ошибки до уровня, ниже приемлемого. Однако повышение мощности прямых каналов графика значительно снижает пропускную способность прямого канала.
Чтобы решить вышеприведенные проблемы, в последнее время был предложен стандарт МДКР Ш-МДКР (широкочастотный МДКР), чтобы повысить скорость управления мощностью прямого канала до 800 герц. Подвижная станция оценивает качество прямого канала связи по известной из уровня техники схеме контроля мощности по замкнутой петле и посылает биты команды управления мощностью прямого канала к одной или более базовым станциям, в зависимости от того, находится ли эта подвижная станция в состоянии передачи обслуживания или нет. Эти биты команды управления мощностью посылаются с частотой 800 герц через управляющий канал обратной линии связи.
В предлагаемом стандарте Ш-МДКР обратный канал имеет два основных подканала: канал доступа, и канал графика. Канал графика, в свою очередь, имеет четыре подканала: пилотный канал, основной канал, дополнительный канал и управляющий канал. В предлагаемом стандарте Ш-МДКР одни и те же биты управления мощностью посылаются ко всем базовым станциям, когда подвижная станция находится в состоянии передачи обслуживания. Таким образом, схема управления мощностью стандарта Ш-МДКР не позволяет обеспечить независимое управление мощностью базовой станции, когда подвижная станция находится в режиме передачи обслуживания. Это приводит к тому, что некоторые базовые станции передают большую мощность, чем это требуется. Как следствие этого, уровень помехи другим подвижным станциям, создаваемый прямым каналом, связи, возрастает и, таким образом, приводит к снижению пропускной способности канала.
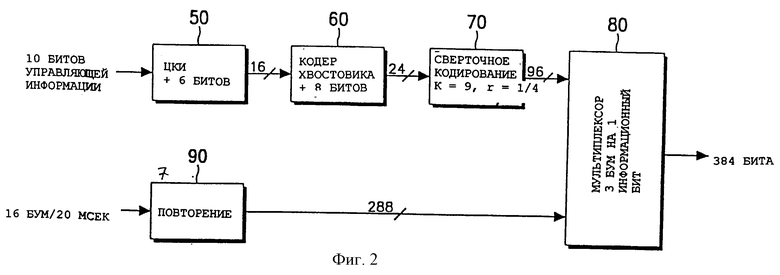
Предлагаемая структура управляющего, канала, осуществленная в подвижной станции для стандарта Ш-МДКР, показана на фиг.2. Десять битов управляющей информации, относящейся к основному и дополнительному каналам, посылаются к блоку циклического контроля избыточности (ЦКИ) 50, чтобы обнаружить состояние ошибки. Выходной сигнал ЦКИ 50 подается в кодер 60 хвостовика. Выход с хвостовика 60 поступает в сверточный кодер 70. Выходной сигнал сверточного кодера 70 посылается в мультиплексор 80. Шестнадцать битов управления мощностью (БУМ) в 20 миллисекунд, или 1 бит управления мощностью (БУМ) в 1,25 миллисекунды подается в блок 90 повторения. Выходной сигнал блока повторения поступает в мультиплексор 80, так что имеется три бита управления мощностью для каждого информационного бита, а выходной сигнал мультиплексора 80 составляет 384 бита. Более подробное описании структуры управляющего канала и компонентов, входящих в эту структуру, представлено в описании к стандарту TIA/EIA/IS-95A (который включен в настоящее описание посредством ссылки).
В результате имеется структура управляющего канала, которая не позволяет обеспечить независимое управление мощностью базовой станции, потому что биты команды управления мощностью, посылаемые к базовой станции, генерируются на основании совокупного качества двух или более сигналов, полученных от множества базовых станций.
Таким образом, существует потребность в новой быстродействующей схеме управления мощностью прямого канала для систем связи на основе МДКР, которая позволяет обеспечить оптимизированное, индивидуальное управление мощностью базовой станции. Это обеспечивает пониженный уровень интерференции на прямом канале связи, что в свою очередь увеличивает пропускную способность прямого канала связи.
Сущность изобретения.
В соответствии с настоящим изобретением предложены система и способ управления мощностью прямого канала связи системы связи на основе МДКР путем реализации независимого управления мощностью базовой станции, когда подвижная станция наводится в состоянии передачи обслуживания.
В соответствии с настоящим изобретением также предложена система МДКР, содержащая множество базовых станций, обеспечивающих выработку объединенного уровня мощности прямого канала, причем каждая из множества базовых станций имеет набор битов управления, и подвижную станцию, находящуюся в электронной связи с множеством базовых станций, причем подвижная станция способна измерять объединенный уровень мощности прямого канала и независимо устанавливать значение каждого из наборов битов управления мощностью на основании объединенного уровня мощности прямого канала.
Дополнительно, в соответствии с настоящим изобретением предложена система МДКР, в которой подвижная станция сравнивает объединенный уровень мощности прямого канала с порогом и регулирует значение каждого из наборов битов управления мощностью, чтобы выдать команду каждой из множества базовых станций снизить мощность, если объединенный уровень мощности прямого канала больше этого порога. Настоящее изобретение кроме того обеспечивает систему МДКР, в которой каждая из множества базовых станций имеет уровень пилотного сигнала прямого канала связи, причем подвижная станция сравнивает относительные уровни каждого из упомянутых уровней пилотного сигнала прямого канала связи, чтобы определить, какая из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи. Подвижная станция может сравнивать объединенный уровень мощности прямого канала с порогом и регулировать значение каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станций снизить мощность, а одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, выдать команду повысить мощность, если объединенный уровень мощности прямого канала меньше или равен порогу.
В соответствии с настоящим изобретением дополнительно обеспечена система МДКР, в которой одна из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи, причем подвижная станция сравнивает объединенный уровень мощности прямого канала с порогом и регулирует значение каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станций, снизить мощность, а одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, выдать команду повысить мощность, если объединенный уровень мощности прямого канала меньше порога или равен ему.
Дополнительно, в соответствии с настоящим изобретением также обеспечена система МДКР, содержащая множество базовых станций, обеспечивающих выработку объединенного уровня мощности прямого канала, причем, каждая из множества базовых станций связана с набором битов управления мощностью, и подвижную станцию, находящуюся в электромагнитной связи с множеством базовых станций, причем подвижная станция конфигурирована так, чтобы независимо регулировать значение каждого из наборов битов управления мощностью на основании объединенного уровня мощности прямого канала. Подвижная станция может сравнивать объединенный уровень мощности прямого канала с порогом и регулировать значение каждого из наборов битов управления мощностью, чтобы выдать команду каждой из множества базовых станций снизить мощность, если объединенный уровень мощности прямого канала больше этого порога. Кроме того, каждая из множества базовых станций может иметь уровень пилотного сигнала прямого канала связи, причем подвижная станция сравнивает относительные уровни каждого из упомянутых уровней пилотного сигнала прямого канала связи, чтобы определить, какая из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи. Подвижная станция может сравнивать объединенный уровень мощности прямого канала с порогом и регулировать значение каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станции снизить мощность, а одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, выдать команду повысить мощность, если объединенный уровень мощности прямого канала меньше порога или равен ему.
В соответствии с настоящим изобретением дополнительно обеспечена система МДКР, в которой одна из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи, причем подвижная станция сравнивает объединенный уровень мощности прямого канала с порогом и регулирует значение каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станций снизить мощность, а одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, выдать команду повысить мощность, если объединенный уровень мощности прямого канала меньше порога или равен ему. Дополнительно, система МДКР по настоящему изобретению может обеспечивать сохранение и поддержание одного из наборов битов управления мощностью каждой из множества базовых станций.
В соответствии с настоящим изобретением также обеспечен способ работы системы МДКР, содержащий этапы поддержания множества базовых станций, обеспечивающих выработку объединенного уровня мощности прямого канала, причем каждая из множества базовых станций связана с набором битов управления мощностью; поддержания подвижной станции, находящейся в электронной связи с множеством базовых станций; конфигурирования подвижной станции так, чтобы независимо регулировать значение каждого из наборов битов управления мощностью на основании объединенного уровня мощности прямого канала, регулировки значения каждого из наборов битов управления мощностью на основании объединенного уровня мощности прямого канала. Этот способ может дополнительно содержать этапы сравнения объединенного уровня мощности прямого канала с порогом и регулировки значения каждого из наборов битов управления мощностью, чтобы выдать команду каждой из множества базовых станций снизить мощность, если объединенный уровень мощности прямого канала больше порога.
В соответствии с настоящим изобретением может быть также обеспечен способ работы системы МДКР, в котором каждая из множества базовых станций имеет уровень пилотного сигнала, прямого канала связи, причем способ дополнительно содержит этап сравнения относительных уровней каждого из уровней пилотного сигнала прямого канала, чтобы определить, какая из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи. Способ может дополнительно содержать этап сравнения объединенного уровня мощности прямого канала с порогом и регулирования значения каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станций снизить мощность, а одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, выдать команду повысить мощность, если объединенный уровень мощности прямого канала меньше или равен порогу.
Дополнительно, в соответствии с настоящим изобретением может быть обеспечен способ работы системы МДКР, в котором одна из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи, причем способ дополнительно содержит этап сравнения объединенного уровня мощности прямого канала с порогом и регулировки значения каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станций снизить мощность, а одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, выдать команду повысить мощность, если объединенный уровень мощности прямого канала меньше порога или равен ему. Этот способ может дополнительно содержать этап сохранения и поддержания наборов битов управления мощностью в множестве базовых станций.
В соответствии с настоящим изобретением также обеспечен способ работы системы МДКР, содержащий этапы измерения объединенного уровня мощности прямого канала множества базовых станций, причем каждая из базовых станций имеет набор битов управления мощностью; сравнения объединенного уровня мощности прямого канала с порогом и независимой регулировки значения каждого из наборов битов управления мощностью, чтобы выдать команду каждой из множества базовых станций снизить мощность, если объединенный уровень мощности прямого канала больше порога.
Дополнительно, в соответствии с настоящим изобретением обеспечен способ работы системы МДКР, содержащий этапы измерения объединенного уровня мощности прямого канала множества базовых станций, причем каждая из базовых станций имеет набор битов управления мощностью и уровень пилотного сигнала прямого канала; сравнения объединенного уровня мощности прямого канала с порогом; сравнения относительных уровней каждого из уровней пилотного сигнала прямого канала связи, чтобы определить, какая из множества базовых станций имеет максимальный уровень пилотного сигнала прямого канала связи; и независимой регулировки значения каждого из наборов битов управления мощностью, чтобы выдать команду выбранным базовым станциям из множества базовых станций снизить мощность, и выдать команду одной из множества базовых станций, имеющей максимальный уровень пилотного сигнала прямого канала связи, повысить мощность, если объединенный уровень мощности прямого канала меньше или равен порогу. Способ может дополнительно содержать этап независимой регулировки значения каждого из наборов битов управления мощностью, чтобы выдать команду каждой из множества базовых станций снизить мощность, если объединенный уровень мощности прямого канала больше порога.
Преимуществом настоящего изобретения является уменьшение интерференции с другими подвижными станциями в соте базовой станции, когда подвижная станция находится в состоянии передачи обслуживания.
Другим преимуществом настоящего изобретения является повышенная пропускная способность канала прямой линии связи.
Еще одним преимуществом настоящего изобретения является уменьшение общей требуемой мощности прямого канала.
Краткое описание чертежей
фиг.1 - система связи на основе МДКР, известная из уровня техники;
фиг.2 - схема известной из уровня техники структуры управляющего канала, используемого в обратном канале стандарта Ш-МДКР;
фиг.3 - схема обычной сети связи МДКР в соответствии с настоящим изобретением;
фиг. 4 - схема структуры управляющего канала согласно настоящему изобретению;
фиг.5 - блок-схема выполнения способа в соответствии с настоящим изобретением.
Обычная телефонная система, в которой реализовано настоящее изобретение, представлена на фиг.3. Система, представленная на фиг.3, использует технику модуляции МДКР для связи между подвижными станциями системы, телефонными блоками и центральными пунктами сотов или базовыми станциями. Сотовые системы в больших городах могут иметь сотни станций центральных пунктов сотов, обслуживающих сотни тысяч подвижных телефонов. Использование техники МДКР значительно облегчает проблему увеличения количества пользователей в системе такого размера по сравнению с обычными сотовыми системами частотной модуляции.
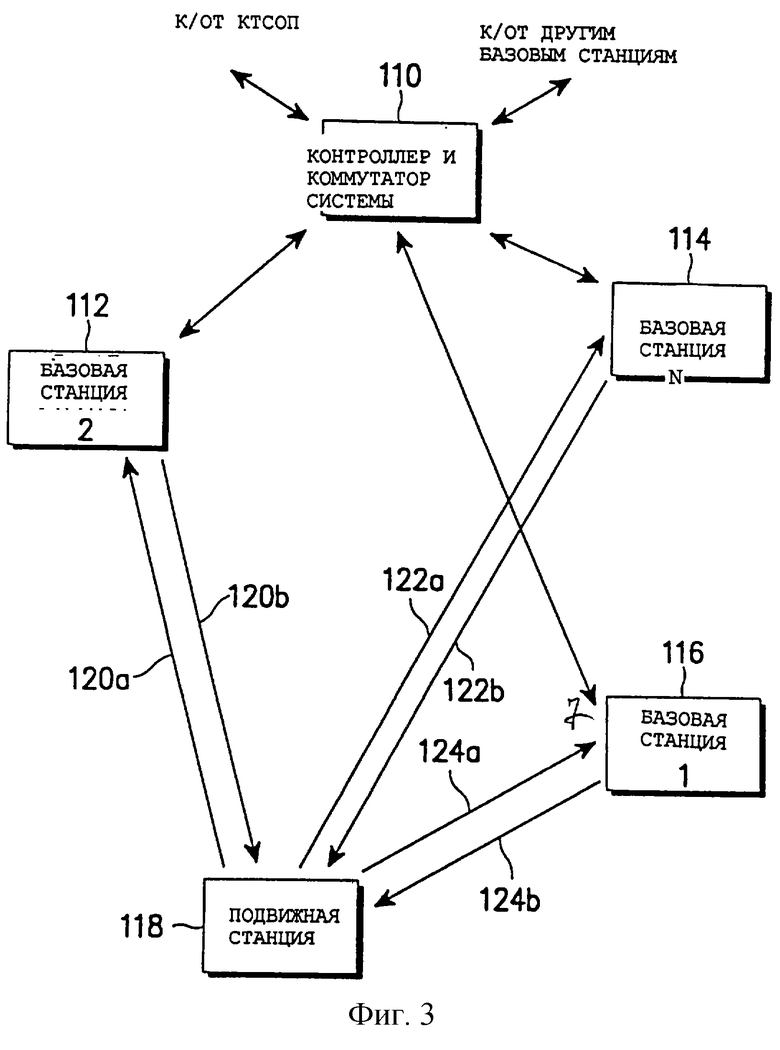
На фиг.3 контроллер 110 и коммутатор системы, которые также называют центром коммутации подвижных телефонов ЦКПТ, обычно содержит интерфейс и схему обработки для обеспечения системного управления центральными пунктами сотов или базовыми станциями. Контроллер 110 также управляет маршрутизацией телефонных вызовов от коммутируемой телефонной сети общего пользования (КТСОП) к соответствующей базовой станции для передачи к соответствующей подвижной станции. Контроллер 110 также управляет маршрутизацией вызовов от подвижной станции через, по меньшей мере, одну базовую станцию к КТСОП. Контроллер 110 направляет вызовы, установленные между подвижными пользователями через соответствующие базовые станции, поскольку такие подвижные станции таких пользователей обычно не связаны непосредственно друг с другом.
Контроллер 110 может быть соединен с базовыми станциями с помощью различных средств, таких как выделенные телефонные линии, оптоволоконные каналы связи или микроволновые каналы связи. Очевидным является, что контроллер 110 и коммутатор системы может быть объединен с любым количеством базовых станций. На фиг.3 показаны три такие типовые базовые станции 112, 114 и 116, вместе с типовой подвижной станцией 118, которая представляет собой сотовый телефон. Стрелки 120а-120b определяют каналы связи между базовой станцией 112 и подвижной станцией 118. Стрелки 122а-122b определяют возможный канал связи между базовой станцией 114 и подвижной станцией 118. Подобным образом, стрелки 124а-124b определяют возможный канал связи между базовой станцией 116 и подвижной станцией 118.
Области обслуживания центрального пункта сота или базовой станции, или соты географически спланированы так, что подвижная станция обычно находится ближе к одному центральному пункту сота, чем к другому. Когда подвижная станция находится в ожидании, т.е. не обслуживает текущий вызов, она постоянно контролирует передачи пилотного сигнала от каждой ближайшей базовой станции. Как показано на фиг.3, пилотные сигналы соответственно передаются к подвижной станции 118 базовыми станциями 112, 114 и 116, соответственно на прямых каналах связи 120b, 122b и 124b. Подвижная станция затем определяет, в каком соте она находится, путем сравнения уровней пилотных сигналов, передаваемых от этих конкретных центров сот.
В примере, представленном на фиг.3, подвижная станция 118 может считаться ближе всего к базовой станции 116. когда подвижная станция 118 инициирует вызов, управляющее сообщение передается к ближайшей базовой станции, базовой станции 116. Базовая станция 116, после получения сообщения запроса на вызов, сигнализирует контроллеру 110 системы и передает номер вызова. Контроллер системы 110 затем соединяет вызов через КТСОП с предназначенным приемником.
Если вызов должен быть инициирован внутри КТСОП, контроллер 110 передает информацию вызова ко всем базовым станциям в регионе. Базовые станции, в свою очередь, передают сообщение поискового вызова (пейджинг) подвижной станции назначенного получателя. Когда подвижная станция получает сообщение вызова, она отвечает управляющим сообщением, которое поступает на ближайшую базовую станцию. Это управляющее сообщение сигнализирует системному контроллеру, что конкретная базовая станция установила связь с этой подвижной станцией. Контроллер 110 затем соединяет вызов через эту базовую станцию к этой подвижной станции.
Если подвижная станция 118 выходит из зоны обслуживания первоначальной базовой станции, базовой станции 116, делается попытка продолжить вызов путем его соединения через другую базовую станцию. В процессе или состоянии передачи обслуживания имеются различные способы инициирования передачи, или направления через другую базовую станцию.
При передаче обслуживания, инициированной подвижной станцией, подвижная станция использует приемник поиска, чтобы сканировать передачу пилотного сигнала соседних базовых станций 112 и 114, в дополнение к выполнению других функций. Если определено, что уровень пилотного сигнала базовых станций 112 и 114 больше, чем уровень пилотного сигнала базовой станции 116, подвижная станция 118 передает управляющее сообщение к текущей базовой станции, базовой станции 116. Это управляющее сообщение содержит информацию, идентифицирующую базовую станцию с большим уровнем сигнала, в дополнение к информации, запрашивающей передачу к этой базовой станции. Текущая базовая станция 116 затем передает это управляющее сообщение контроллеру 110.
В соответствии с настоящим изобретением каждой базовой станции назначен набор битов управления мощностью, который должен быть передан на обратном канале подвижной станции. Такая компоновка позволяет подвижной станции поддерживать связь с каждой базовой станцией независимо, с учетом необходимости увеличивать ли или уменьшать мощность базовой станции. Таким образом, мощность для каждого прямого канала связи может управляться независимо. Так, мощность первой базовой станции может быть увеличена, в то время как мощность второй базовой станции может быть уменьшена, чтобы минимизировать помехи другим подвижным станциям, которые не находятся в состоянии передачи обслуживания.
На фиг.4 представлена схема, структуры управляющего канала согласно настоящему изобретению. Ссылочные номера, используемые на фиг.4, которые одинаковы со ссылочными номерами, используемыми на фиг.2, обозначают одинаковые компоненты. Фиг. 4 внешне идентична фиг.2, кроме того, что блок 295 объединения объединяет 16 битов на кадр для базовой станции 1 (БС1) с 16 битами на кадр для каждой базовой станции до базовой станции N (ECN), где один кадр передается за 20 миллисекунд. Биты управления мощностью для БС1, биты управления мощностью для ВС2, до битов управления мощностью для BCN могут быть сформированы в подвижной станции с использованием структуры управляющего канала, представленного на фиг.4.
Функциональный блок 295 объединения может формировать многоуровневые биты. Например, может быть использована амплитудно-импульсная модуляция (АИМ), чтобы послать биты управления мощностью.
Количество различных наборов битов управления мощностью будет, очевидно, ограничено тем, что мощность, назначенная всем управляющим битам в период 1,25 миллисекунды, остается постоянной. Это происходит потому что все биты управления мощностью посылаются в пределах 1,25 миллисекунд; например, могут быть посланы 2 управляющих бита за 1,25 миллисекунды, из которых один бит управления мощностью назначен первой базовой станции, а второй бит управления мощностью назначен второй базовой станции; и может быть послано 3 бита управления мощностью за 1,25 миллисекунды, где один бит управления мощностью будет послан первой базовой станции, второй бит управления мощностью будет послан второй базовой станции и третий бит управления мощностью будет послан третьей базовой станции, и т.д. Если мощность, распределенная всем управляющим битам, остается постоянной в пределах периода в 1,25 миллисекунды, тогда практический предел может быть, например, равен 3 или 4 управляющим битам на 1,25 миллисекунды, поскольку приемная базовая станция может не быть способна детектировать предназначенный ей бит управления мощностью из-за сниженного индивидуального уровня мощности бита, вызванного разделением общей мощности, назначенной одному кадру, поровну между каждым БУМ (битом управления мощностью).
Согласно настоящему изобретению, уровень мощности битов управления мощностью может управляться независимо от 10 битов управляющей информации, как следует из структуры управляющего канала, чтобы обеспечить N битов управления мощностью на 1,25 миллисекунды, или другими словами, чтобы управлять N базовыми станциями.
Согласно настоящему изобретению, имеется два правила, для формирования битов управления мощностью для разных базовых станций подвижной станцией.
Правило 1. Если объединенная мощность прямого канала превосходит некоторый заранее определенный порог, подвижная станция должна формировать биты управления мощностью, чтобы дать команду всем базовым станциям снизить мощность (уменьшить мощность их соответствующих прямых каналов).
Правило 2. Если объединенная мощность прямого канала меньше заранее определенного порога или равна ему, подвижная станция должна определить приоритет уровней пилотного сигнала прямого канала связи (Ec/Io) для всех задействованных базовых станций в состоянии передачи обслуживания. Подвижная станция должна затем регулировать бит управления мощностью базовой станции, соответствующей максимальному (Ec/Io), на увеличение мощности (увеличить мощность соответствующего прямого канала), а другим базовым станциям на уменьшение мощности.
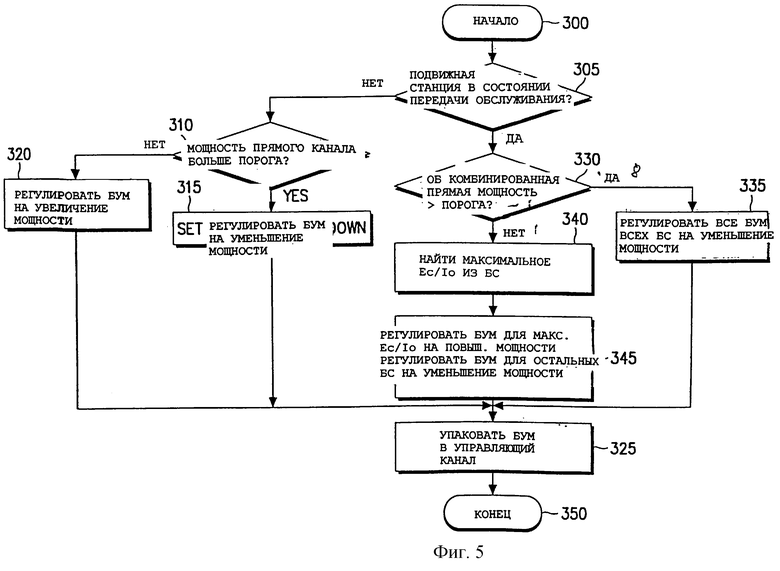
Эти правила и способ согласно настоящему изобретению представлен на блок-схеме на фиг. 5. Способ начинается на этапе 300. На этапе 305 определяется, находится ли подвижная станция в состоянии передачи обслуживания. Если подвижная станция не находится в состоянии передачи обслуживания, происходит переход к этапу 310, на котором мощность прямого канала сравнивается с заранее определенной величиной порога. Если мощность прямого канала больше заранее определенной величины порога, осуществляется переход на этап 315, на котором биты управления мощностью регулируются на уменьшение мощности. Если мощность прямого канала не превосходит порог, то осуществляется переход на этап 320, на котором биты управления мощностью регулируются на увеличение мощности. После регулировки битов управления мощностью на уменьшение мощности на этапе 315 или повышение мощности на этапе 320, осуществляется переход на этап 325, на котором все биты управления мощностью упаковываются в управляющий канал согласно структуре управляющего канала, показанной на фиг.4, так чтобы биты управления мощностью могли быть переданы от подвижной станции к соответствующим базовым станциям.
Если подвижная станция находится в состоянии передачи обслуживания, как определено на этапе 305, то осуществляется переход на этап 330, на котором объединенная мощность прямого канала сравнивается с заранее определенным порогом. Если объединенная мощность прямого канала больше, чем заранее определенный порог, осуществляется переход на этап 335. На этапе 335 все биты управления мощностью всех базовых станций регулируются на уменьшение мощности, и осуществляется переход на этап 325, где все биты управления мощностью упаковываются в управляющий канал. Если объединенная мощность прямого канала не более чем порог, как определено на этапе 330, осуществляется переход на этап 340, где определяется максимальное отношение Ec/Io от всех задействованных базовых станций. Процесс затем переходит на этап 345, где бит управления мощностью для базовой станции с максимальным Ec/Io регулируется на увеличение мощности, а биты управления мощностью для других базовых станций регулируются на уменьшение мощности. Затем осуществляется переход на этап 325, где все биты управления мощностью упаковываются в управляющий канал. Процесс заканчивается на этапе 350.
Очевидным является, что в настоящем изобретении могут быть выполнены различные модификации без выхода за рамки его сущности, определенные в нижеследующей формуле изобретения.
Изобретение относится к системам связи множественного доступа с кодовым разделением каналов (МДКР) и более конкретно, к системе управления мощностью прямого канала связи от базовой станции к подвижным станциям. Способ и система управления мощностью прямого канала связи основаны на реализации независимого управления мощностью базовой станции, когда подвижная станция находится в состоянии передачи обслуживания. Способ и система включают в себя передачу различных битов управления мощностью к каждой базовой станции, чтобы независимо управлять мощностью передачи каждой базовой станции. Технический результат, достигаемый при реализации изобретения, состоит в обеспечении уменьшения интерференции с другими подвижными станциями в соте базовой станции, когда подвижная станция находится в состоянии передачи обслуживания. 4 с. и 11 з.п.ф-лы, 5 ил.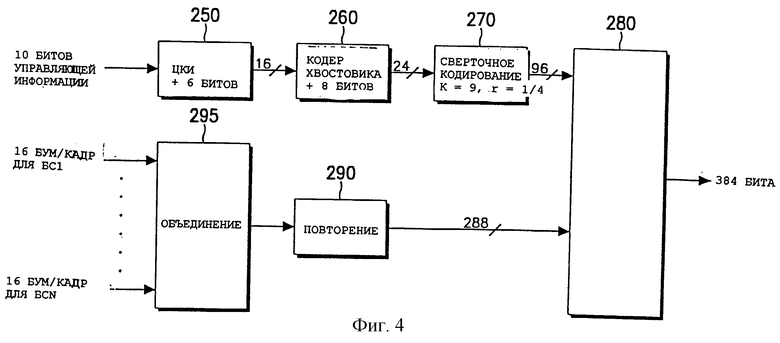
| ЕР 0683570 А2, 22.11.1995 | |||
| СПОСОБ РАЗДЕЛЕНИЯ МЕТИЛДИГИДРОПИРАНА, Alt ГИЛ ЕНТЕТРАГИДРОПЙ РАНА, ДИМЕТИЛДИОКСАНА И НЕПРЕДЕЛЬНОГО СПИРТА | 0 |
|
SU330166A1 |
| RU 95108874 A1, 10.05.1997 | |||
| US 5621723 А, 15.04.1997 | |||
| US 5570367 А, 29.10.1996 | |||
| Огнетушитель | 0 |
|
SU91A1 |
