Изобретение относится к области медицинской техники и может быть использовано для массажа различных частей тела.
Из предшествующего уровня техники известен роликовый массажер, содержащий корпус с ручкой, в котором на осях с возможностью поворота установлены скобы с вращающимися роликами (патент ЕР N 0465758, кл. А 61 H 15/00, опубл. 15.01.92). Известен массажер, содержащий корпус и установленные на нем на осях с возможностью поворота вокруг оси втулки, по торцам которых установлены парные массажные элементы в виде свободно вращающихся роликов (патент RU N 2003322, кл. А 61 H 15/00, опубл. 30.11.93, прототип).
Известные массажеры не обладают достаточной гибкостью для применения при массаже различных труднодоступных участков тела из-за жесткого корпуса.
Задачей, на решение которой направлено данное изобретение, является создание конструкции гибкого корпуса массажера и увеличение степеней свободы массажных элементов.
Технический результат изобретения заключается в том, что массажер позволяет эффективно осуществлять массаж как в доступных, так и в труднодоступных участках тела, лица, шеи, рук и ног, используя при этом только один массажер, за счет увеличения гибкости корпуса и, как следствие, увеличения числа степеней свободы массажных элементов до трех. Массажер легок, компактен, прочен. Массажер удобен в упаковке, поскольку может складываться в одной плоскости за счет поворота ручки.
Технический результат достигается за счет того, что массажер содержит корпус и установленные на нем с возможностью перемещения на оси втулки, по боковым сторонам каждой из которых установлены с возможностью вращения массажные элементы в виде роликов. Корпус выполнен в виде большой оси и симметрично перпендикулярно установленных по ее боковым частям с возможностью вращения на 360 градусов относительно нее двух малых осей, на боковых частях каждой из которых расположены с возможностью фиксированного углового радиального перемещения в обе стороны на 20-30 градусов втулки с роликами по боковым сторонам. При этом один ролик выполнен за одно целое со стержнем, а другой выполнен с отверстием для жесткой фиксации в нем стержня, размещенного в дополнительном отверстии втулки с возможностью вращения. Втулки и малые оси жестко зафиксированы соответственно на малых осях и большой оси, а в центре большой оси выполнен прилив с отверстием для крепления ручки посредством цангового соединения.
Массажер может быть дополнительно снабжен по крайней мере одной секцией, как описано выше.
Секции могут быть соединены между собой ручкой, выполненной в виде дуги и зафиксированной по центру большой оси посредством цангового соединения. Ширина ручки в месте соединения с корпусом может быть равна длине большой оси.
По меньшей мере три секции могут быть соединены между собой по торцам больших осей посредством планки.
Массажер может быть дополнительно снабжен гибкой скалкой с ручками, при этом большая ось выполнена разъемной в центре и полой, размещена на гибкой скалке вместе с двумя малыми осями, содержащими массажные элементы, а в разъеме большой оси на гибкой скалке установлены с зазором, обеспечивающим продольное перемещение, не менее восьми массажных элементов различной конфигурации с возможностью их вращения на 360 градусов, причем ручки выполнены с приливами, ограничивающими продольное перемещение малых осей.
Втулки и малые оси в первом варианте массажера зафиксированы жестко соответственно на малых осях и большой оси посредством заклепок.
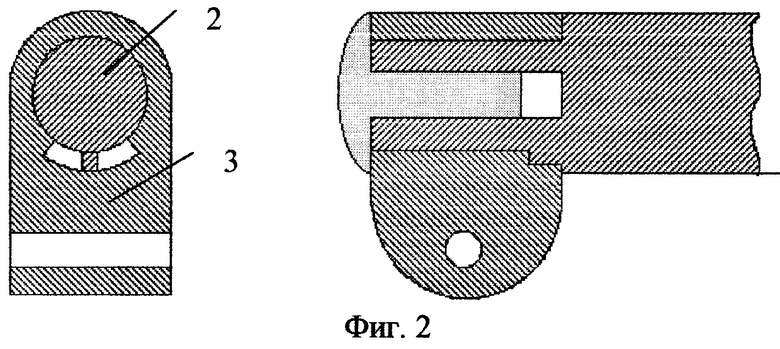
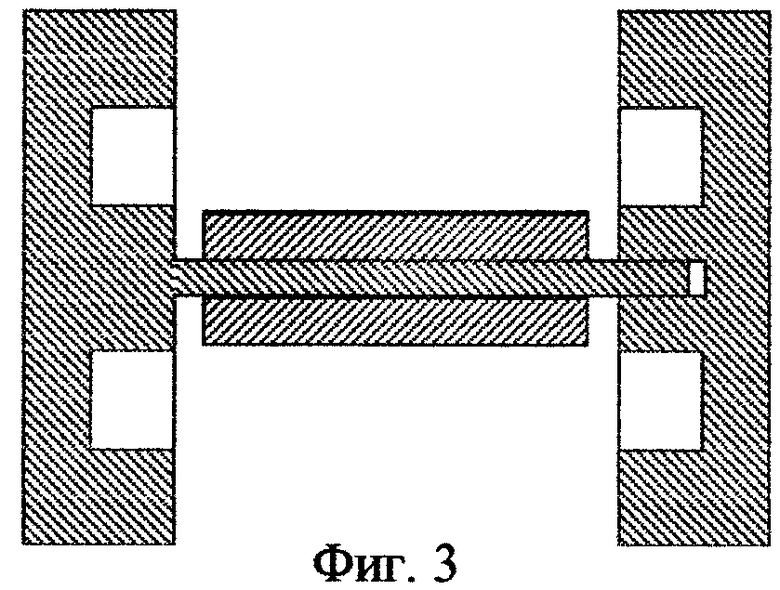
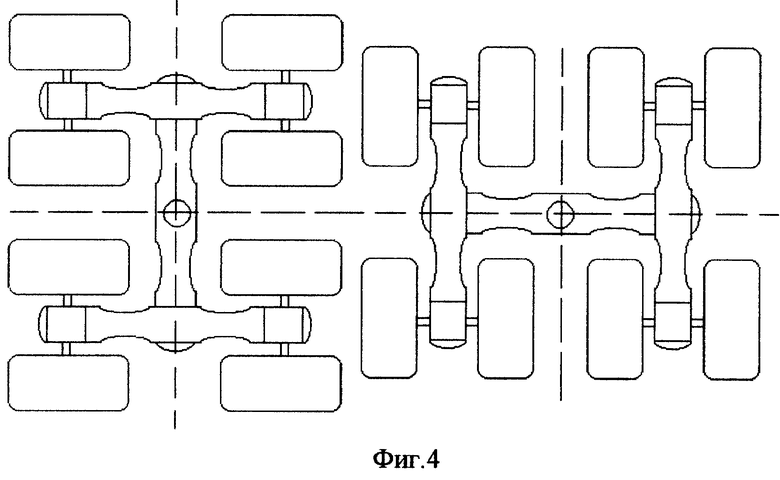
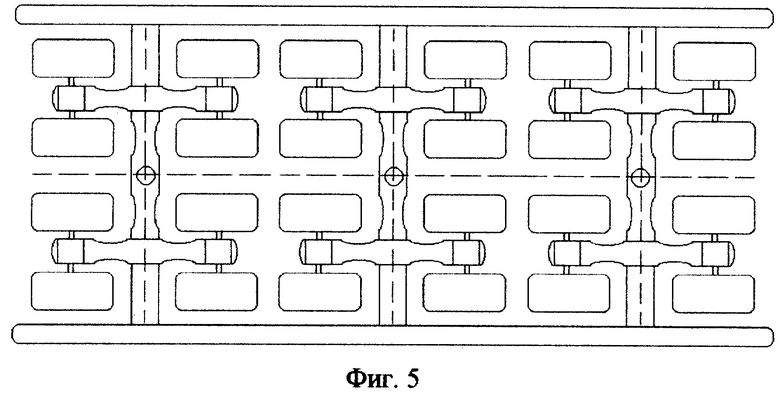
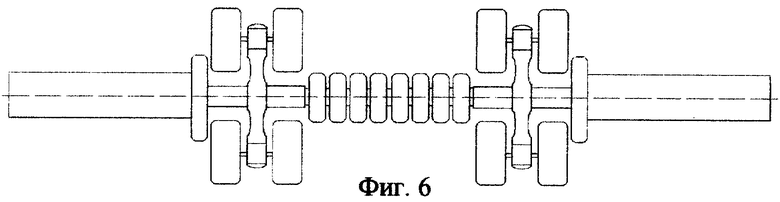
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен общий вид устройства, на фиг. 2 - узел крепления втулки на малой оси корпуса, на фиг. 3 - узел крепления роликов во втулке, на фиг. 4 - 6 - варианты массажера.
Массажер содержит большую ось 1 и расположенные перпендикулярно симметрично по торцам две малые оси 2. На боковых частях большой оси 1 и малых осей 2 выполнены ступени меньшего диаметра (цапфы). По торцам большой оси 1 и малых осей 2 выполнены осевые отверстия. Малые оси 2 установлены на цапфах большой оси 1 по скользящей посадке с возможностью вращения на 360 градусов относительно нее. В центре большой оси выполнен прилив с отверстием, в котором посредством цангового крепления установлена вертикально ручка (на чертеже не показана). На боковых частях малых осей 2 размещены с возможностью радиального перемещения втулки 3. На цапфах малых осей выполнены ограничители радиального перемещения втулок в пределах 20-30 градусов в каждую сторону. Радиальное перемещение может ограничиваться, например, за счет выполнения на торце втулки 3 радиального паза, а на малой ступени (цапфе) большой оси - выступа (фиг. 2).
Во втулках 3 перпендикулярно вертикальной оси выполнены дополнительные отверстия. По боковым сторонам каждой втулки установлены с возможностью вращения массажные элементы в виде роликов 4. Один из роликовых массажных элементов выполнен за одно целое со стержнем, а другой имеет отверстие для жесткой фиксации в нем стержня. Вращение роликов 4, жестко соединенных друг с другом, обеспечивается за счет свободного расположения полуоси в дополнительном отверстии втулки 3 (фиг. 3).
Втулки 3 и малые оси 2 зафиксированы жестко соответственно на малых осях 2 и большой оси 1 посредством заклепок, установленных в торцевых отверстиях большой 1 и малых осях 2. Массажер может быть снабжен по крайней мере дополнительно еще одной секцией, как описано выше, соединенных между собой ручкой, зафиксированной по центру большой оси 1 (фиг. 4).
Для удобства пользования ручка может быть выполнена в этом варианте в виде дуги, опирающейся на две опоры, концы которых представляют собой цанги, вставляющиеся легко и быстро в отверстие центрального прилива больших осей 1 (на чертеже не показана). Три секции могут быть соединены между собой посредством планки (фиг. 5). В таком варианте исполнения массажер может быть использован для массажа ступней ног.
Массажер может быть выполнен в виде гибкой скалки с ручками (фиг. 6). В этом варианте большая ось 3 выполнена разъемной и полой и размещена на гибкой скалке вместе с двумя малыми осями с массажными элементами, а в разъеме большой оси на скалке установлены с зазором, обеспечивающим перемещение не менее восьми массажных элементов различной конфигурации с возможность вращения на 360 градусов. Данный вариант массажера пригоден для массажа спины. Массажер изготовлен из медицинской пластмассы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКАЯ ИГРУШЕЧНАЯ ФИГУРКА | 2001 |
|
RU2188690C1 |
| МАССАЖЕР | 1999 |
|
RU2147861C1 |
| Массажная кровать | 1989 |
|
SU1708335A1 |
| Массажер | 2019 |
|
RU2711494C1 |
| Массажер | 2019 |
|
RU2711495C1 |
| МАССАЖЕР | 2008 |
|
RU2385704C1 |
| МАССАЖЕР-28 | 2005 |
|
RU2293549C2 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| МЕХАНИЧЕСКИЙ МАССАЖЕР | 2006 |
|
RU2317059C1 |
| МАССАЖЁР | 2017 |
|
RU2676436C2 |
Изобретение относится к области медицинской техники и может быть использовано для массажа различных частей тела. Технический результат изобретения заключается в том, что массажер позволяет эффективно осуществлять массаж как в доступных, так и в труднодоступных участках тела, лица, шеи, рук и ног, используя при этом только один массажер, за счет увеличения гибкости корпуса и, как следствие, увеличения числа степеней свободы массажных элементов до трех. Массажер содержит корпус и установленные на нем с возможностью перемещения на оси втулки, по боковым сторонам каждой из которых установлены с возможностью вращения массажные элементы в виде роликов. Корпус выполнен в виде большой оси и симметрично перпендикулярно установленных по ее боковым частям с возможностью вращения на 360 градусов относительно нее двух малых осей. На боковых частях каждой из малых осей расположены с возможностью фиксированного углового радиального перемещения в обе стороны на 20-30 градусов втулки с роликами по боковым сторонам. При этом один ролик выполнен за одно целое со стержнем, а другой выполнен с отверстием для жесткой фиксации в нем стержня, размещенного в дополнительном отверстии втулки с возможностью вращения. Втулки и малые оси жестко зафиксированы соответственно на малых осях и большой оси, а в центре большой оси выполнен прилив с отверстием для крепления ручки посредством цангового соединения. В дополнительных пунктах представлены варианты массажера в виде двух секций для массажа тела, трех секций для массажа ног и скалки для массажа спины. 6 з.п.ф-лы, 6 ил.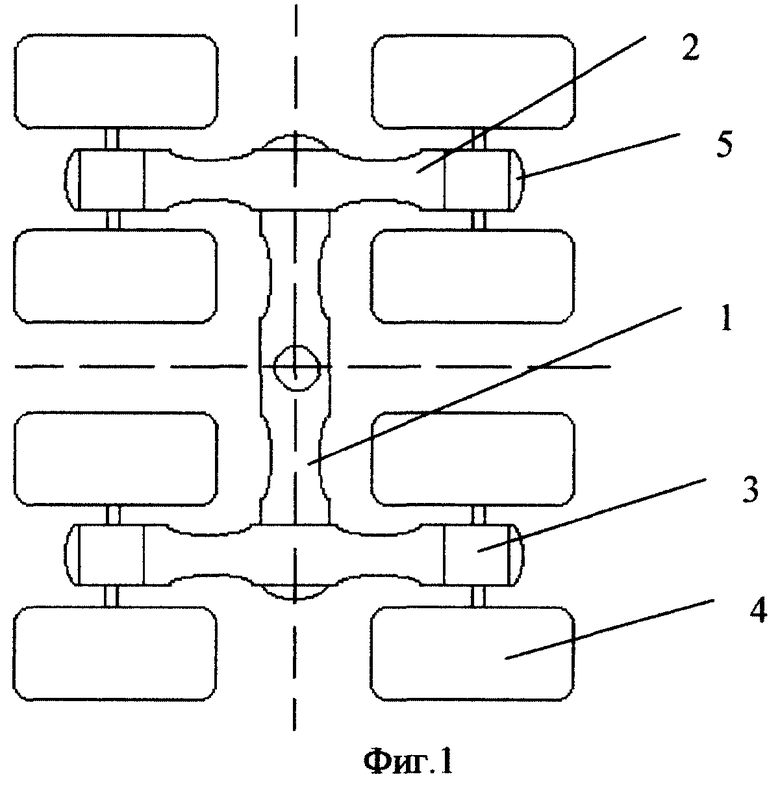
| DE 19817533 A1, 14.10.1999 | |||
| DE 1973980 A1, 18.03.1999 | |||
| Способ комбинированного хирургического лечения вторичной глаукомы, вызванной эмульгированием силикона | 2018 |
|
RU2688960C1 |
| Устройство для механического самомассажа стопы | 1983 |
|
SU1097324A2 |
| Устройство для массажа | 1981 |
|
SU1024085A1 |

