Изобретение относится к медицинской технике, к устройствам для массажа, в частности к валиковым массажерам, и может быть использовано как средство для рефлексотерапевтического воздействия на организм человека в лечебных и профилактических целях.
Общеизвестные массажеры, как правило, включают эластичное основание, выполненное в виде тела вращения заданной конфигурации, преимущественно в виде цилиндра, и закрепленное на соответствующей арматуре массажера с возможностью вращения вокруг продольной оси тела вращения. В эластичном основании закреплены элементы рефлекторного воздействия, в частности, металлические иглы, острия которых выступают за пределы эластичного основания, образуя рабочую сторону массажера (например, http: http://argonizm.ru/valik-universalnyy?tracking=53ae8605ccb90).
Такие массажеры, в отличие от статических аппликаторов, осуществляют динамическое воздействие (так называемый «игольчатый душ») за счет многократных кратковременных действий игл на тело пользователя.
Известен, как аналог, механический массажер по патенту Российской Федерации на полезную модель №83184, МПК А61Н 15/00, дата подачи заявки 19.03.2009, который содержит корпус, выполненный в виде рукоятки и стержневой U-образной рамы, и четыре сменных массажных ролика, установленных на полуосях, которые попарно закреплены на поперечине указанной рамы. Угол α между полуосями в паре равен 70-100°, а угол β между полуосями и поперечиной рамы (продольной осью корпуса) равен 20-70°. Ролики установлены на полуосях с возможностью свободного вращения и могут совершать вдоль них возвратно-поступательные движения. Для этого в ролике выполнена полость, в которой установлена пружина. С одной стороны ход пружины ограничен внутренней поверхностью полости ролика, а с другой - гайкой со стопорным кольцом, установленной на полуоси.
Массажист, надавливая на устройство с определенным усилием, прокатывает массажер по массируемому участку вдоль поперечины рамы. В процессе массажа образуется кожно-мышечный валик за счет сжатия ткани между роликами, расположенными под соответствующими углами между собой и относительно поперечины. В результате надавливания, подпружиненные ролики сдвигаются в сторону. Возникающее при этом возвратное напряжение в пружинах приводит к тому, что ролики захватывают ткани и, вращаясь, растягивают массируемый участок под некоторым углом к основному массажному движению. Таким образом, механический массажер имитирует известные приемы классического массажа.
Общими признаками аналога и заявляемого решения являются: массажер, содержащий корпус, по меньшей мере, одну пару массажных роликов, установленных с возможностью вращения на полуосях, расположенных под соответствующими углами между собой и относительно продольной оси корпуса.
Недостатком механического массажера является невозможность изменения (регулирования) углов между полуосями в паре роликов, а также между полуосями и продольной осью корпуса (полуоси жестко закреплены на раме корпуса), что снижает эффективность массажа участков тела пользователя с различной кривизной.
В качестве прототипа выбран массажер-манипулятор, известный по патенту Российской Федерации на изобретение №2103978, МПК А61Н 23/00, дата подачи заявки 22.02.1996.
Массажер содержит корпус с рукояткой и, по меньшей мере, одну пару осей (стержней) последовательно соединенных с помощью шарнира с возможностью изменения угла между осями (стержнями), а также средства выбора и фиксации угла между осями (стержнями). На осях (стержнях) установлены с возможность вращения массажные элементы, которые могут быть выполнены из различных материалов в виде тел вращения различной конфигурации. Оси с массажными элементами расположены в плоскости массируемой поверхности. Средства выбора и фиксации угла между каждой парой осей (стержней) представлены гнездами, выполненными на корпусе вдоль окружности и фиксаторами на свободных концах осей (стержней), выполненными с возможностью установки в выбранных гнездах корпуса.
Массажер применяют следующим образом.
Например, первую пару осей с массажными элементами устанавливают открытым углом, вторую пару - закрытым углом в направлении движения массажера. При движении массажера по телу пациента осуществляется растяжением мягких тканей от середины массируемой полосы к ее бокам первой парой и сжатие мягких тканей массируемой полосы от ее боков к середине второй парой массажных элементов. Возможны и другие варианты настройки массажера (открытый или закрытый угол, величина угла - для каждой пары осей с массажными элементами), что обеспечивает разнообразие массажных манипуляций.
Общими признаками прототипа и заявляемого решения являются: массажер, содержащий корпус, по меньшей мере, одну пару массажных роликов, установленных с возможностью вращения на полуосях, соединенных с помощью центрального шарнира с возможностью изменения угла между ними, а также средства изменения и фиксации угла между указанными полуосями.
В описанной конструкции массажера изменение угла между полуосями возможно только в одной плоскости - в плоскости, параллельной продольной оси корпуса, в которой всегда расположены массажные ролики. Изменение указанного угла в других плоскостях, наклонных к продольной оси корпуса в конструкции не предусмотрено. Кроме того, указанный угол может изменяться только дискретно. Указанные обстоятельства снижают эффективность массажной процедуры особенно на участках тела с различной кривизной.
В основу изобретения поставлена задача повышение эффективности массажера.
Поставленная задача решается тем, что в массажере, содержащем корпус, по меньшей мере, одну пару массажных роликов, установленных с возможностью вращения на полуосях, соединенных с помощью центрального шарнира с возможностью изменения угла между ними, а также средства изменения и фиксации угла между указанными полуосями, согласно изобретению, средства изменения и фиксации угла между полуосями выполнены в виде рамы, шарнирно соединенной с корпусом, свободные концы полуосей шарнирно соединены с продольными элементами рамы, а центральный шарнир полуосей соединен со стержнем, установленным в направляющих рамы с возможностью перемещения вдоль продольной оси рамы и фиксации в выбранном положении.
Указанные признаки являются существенными признаками изобретения, так как являются необходимыми и достаточными для решения поставленной задачи - повышение эффективности массажера.
Выполнение средств изменения угла между полуосями в виде рамы, продольные элементы которой шарнирно соединены со свободными концами полуосей, а также стержня, соединенного с центральным шарниром полуосей и установленного в направляющих рамы с возможностью перемещения вдоль продольной оси рамы и фиксации в выбранном положении, дает возможность плавного изменения угла между полуосями. При перемещении центрального шарнира вдоль продольной оси рамы свободные концы полуосей проворачиваются и перемещаются в шарнирных соединениях с продольными элементами рамы, плавно изменяя угол между полуосями. Шарнирное соединение рамы, с корпусом позволяет изменять угол между полуосями в различных плоскостях, наклонных к продольной оси корпуса, что повышает эффективности массажа различных участков тела пользователя с разной кривизной.
Корпус целесообразно выполнить с возможностью удержания массажера в руке пользователя (в виде рукоятки).
Рама может иметь вильчатую форму, свободные концы которой шарнирно соединены со свободными концами соответствующих полуосей.
Рама может иметь форму прямоугольника, при этом свободные концы полуосей шарнирно соединены с продольными элементами прямоугольника,
Шарнирное соединение свободного конца каждой полуоси с соответствующим продольным элементом рамы целесообразно выполнить в виде цилиндрического шарнира, в шарнирной оси которого выполнено поперечное отверстие, в котором расположен свободный конец соответствующей полуоси с возможностью перемещения в указанном отверстии.
Центральный шарнир полуосей целесообразно выполнить с возможностью переустановки вдоль оси соединенного с ним стержня. Такое выполнение позволяет устанавливать разные углы между полуосями в соседних парах массажных роликов.
Массажные ролики целесообразно выполнить в виде тел вращения, преимущественно, цилиндрической и/или сферической формы.
Массажные ролики могут быть выполнены в виде жесткого сердечника с элементами рефлекторного воздействия.
Массажные ролики могут быть выполнены в виде жесткого сердечника, на котором закреплено эластичное основание с элементами рефлекторного воздействия
Массажные ролики могут быть выполнены в виде полого тела вращения, образованного эластичным основанием с элементами рефлекторного воздействия и боковыми эластичными диафрагмами.
Элементами рефлекторного воздействия могут быть шипы, выполненные за одно целое с жестким сердечником или эластичным основанием.
Элементами рефлекторного воздействия могут быть металлические иглы, закрепленные в жестком сердечнике или эластичном основании и выполненные из разных металлов.
Элементами рефлекторного воздействия могут быть металлические иглы, закрепленные в жестком сердечнике или эластичном основании и выполненные, по меньшей мере, с одним частичным покрытием, электрохимический потенциал которого отличается от электрохимического потенциала материала иглы.
Элементами рефлекторного воздействия могут быть вставки, закрепленные в жестком сердечнике или эластичном основании, при этом вставки могут быть металлическими, и/или металлическими, по меньшей мере, с одним частичным покрытием, электрохимический потенциал которого отличается от электрохимического потенциала материала вставки, и/или из магнитного материала, и/или из природных минералов.
Массажер может быть выполнен со средствами электрического соединения выбранных групп элементов рефлекторного воздействия с источником электрических сигналов, что позволяет воздействовать на тело пользователя электрическими сигналами различной величины и формы.
Массажер может содержать две рамы с массажными роликами, при этом рамы шарнирно закреплены на противоположных сторонах корпуса.
Ниже приводится описание заявляемого массажера со ссылками на чертежи, на которых показано:
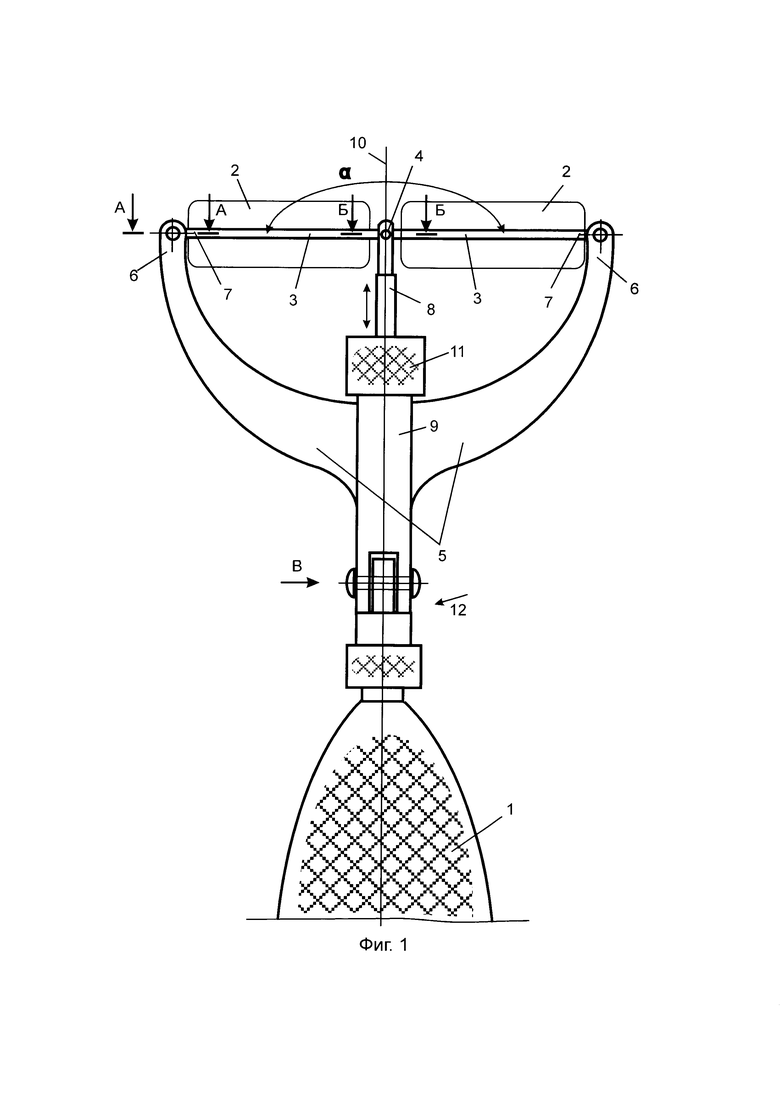
Фиг. 1 - Массажер, общий вид, рама имеет вильчатую форму, угол α между полуосями массажных роликов равен 180°.
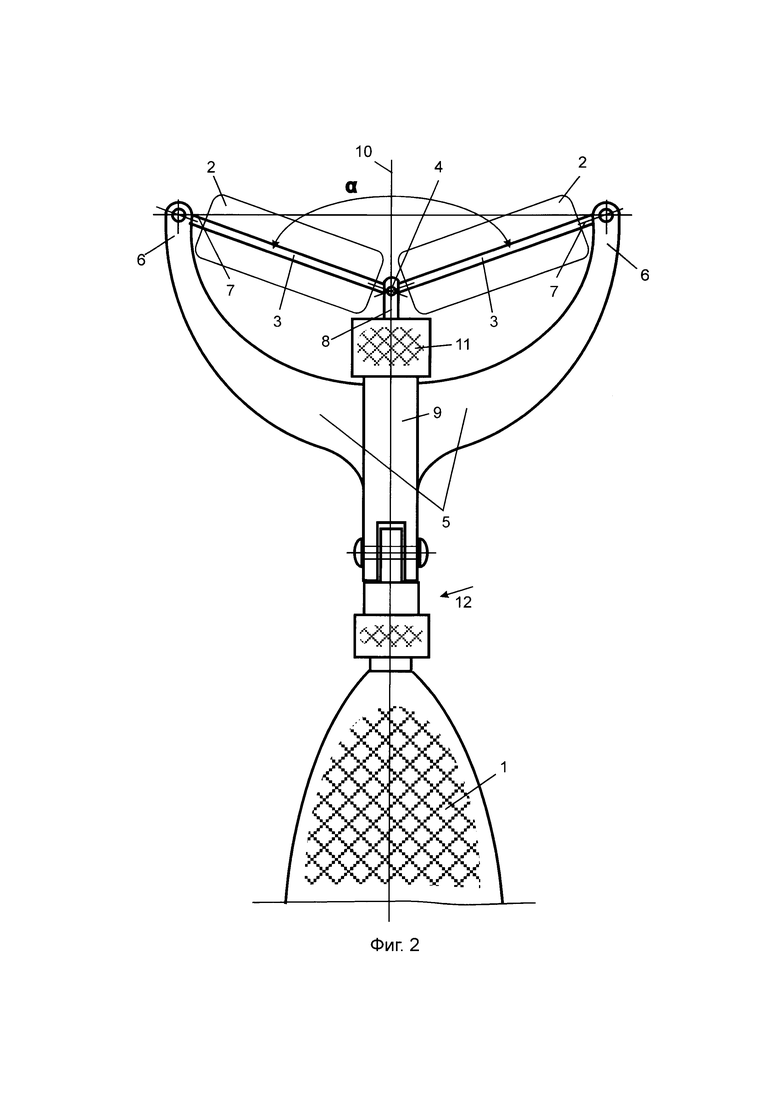
Фиг. 2 - Массажер, общий вид, рама имеет вильчатую форму, угол α между полуосями массажных роликов меньше 180°.
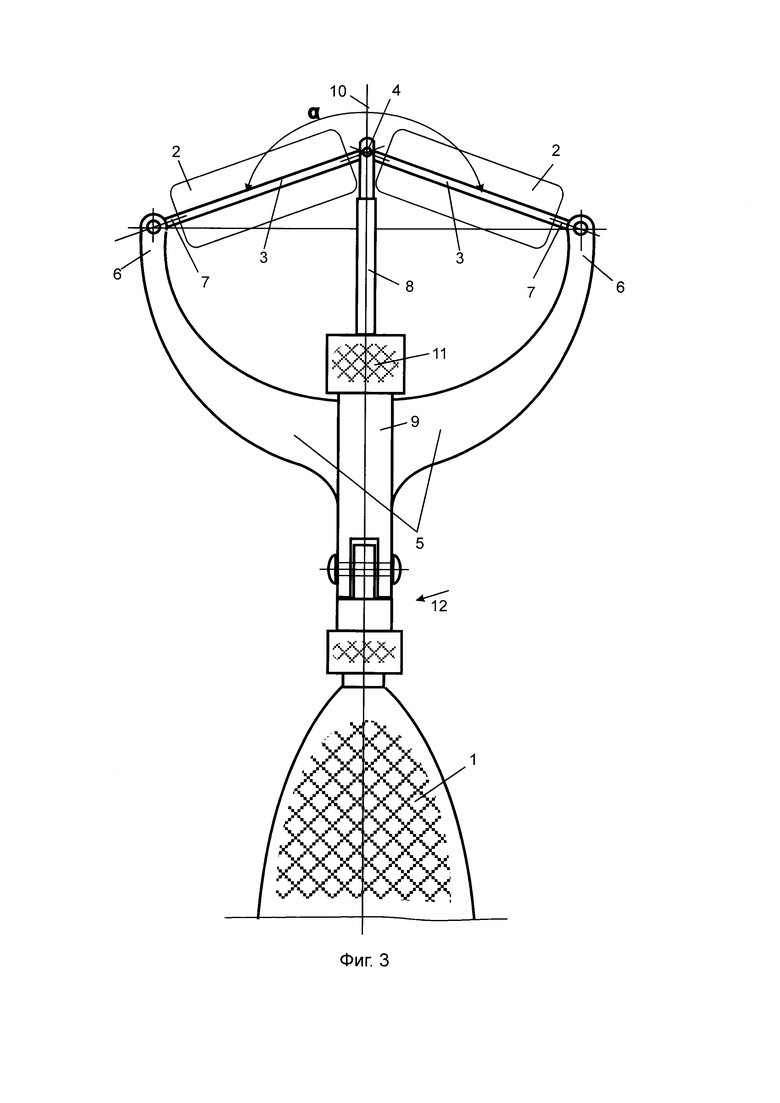
Фиг. 3 - Массажер, общий вид, рама имеет вильчатую форму, угол α между полуосями массажных роликов больше 180°.
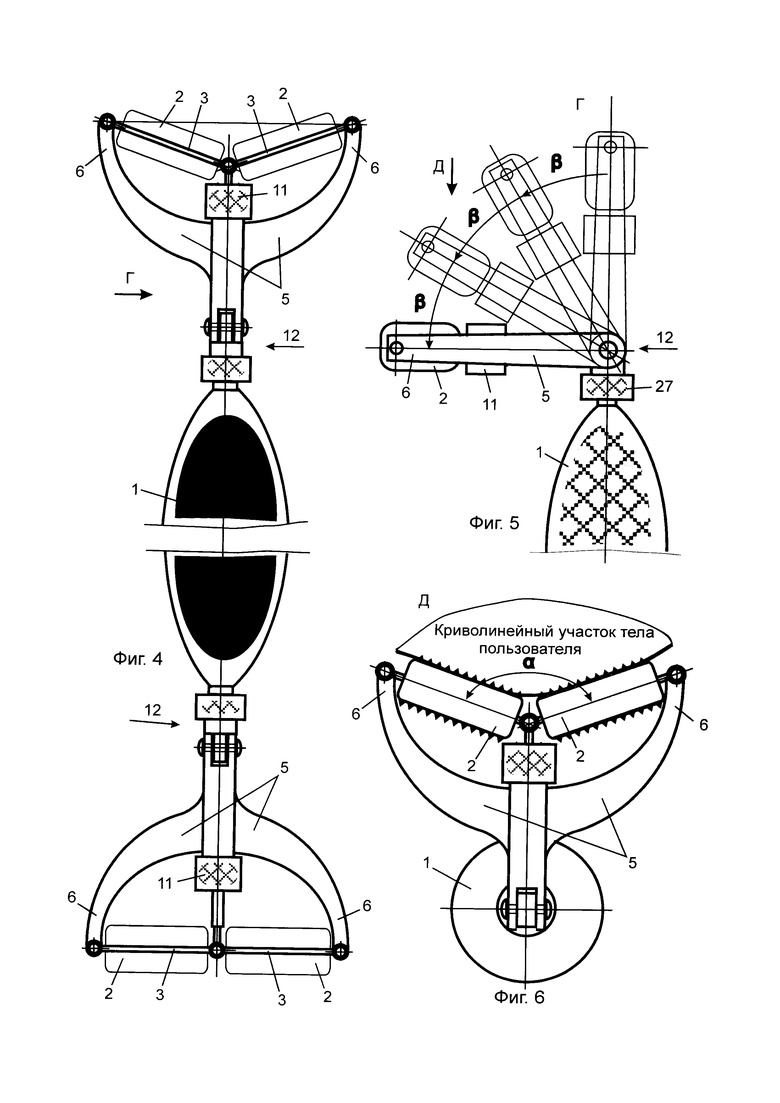
Фиг. 4 - Массажер, выполнение с двумя рамами, шарнирно закрепленными на противоположных сторонах корпуса.
Фиг. 5 - Массажер, вид Г на фиг. 4.
Фиг. 6 - Массажер, вид Д на фиг. 5, схема взаимодействия массажных роликов с криволинейным участком тела пользователя.
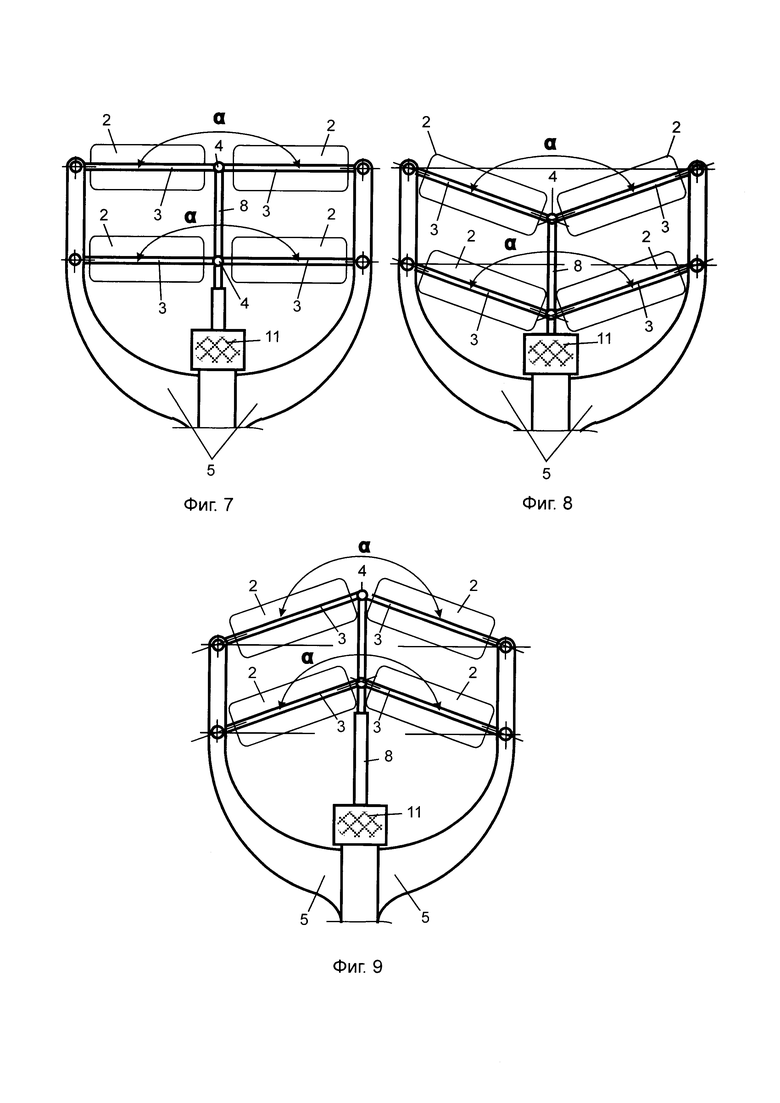
Фиг. 7 - Массажер, пример выполнения с двумя парами массажных роликов, угол α между полуосями массажных роликов равен 180°.
Фиг. 8 - Массажер, пример выполнения с двумя парами массажных роликов, угол α между полуосями массажных роликов меньше 180°.
Фиг. 9 - Массажер, пример выполнения с двумя парами массажных роликов, угол α между полуосями массажных роликов больше 180°.
Фиг. 10 - Массажер, узел цилиндрических массажных роликов, продольный разрез.
Фиг. 11 - Массажер, узел сферических массажных роликов, продольный разрез.
Фиг. 12 - Массажер, разрез А-А на фиг. 1.
Фиг. 13 - Массажер, разрез Б-Б на фиг. 1
Фиг. 14 - Массажер, вид В на фиг. 1, угол β между продольными осями рамы и корпуса равен 180°.
Фиг. 15 - Массажер, вид В на фиг. 1, угол β между продольными осями рамы и корпуса больше 180°.
Фиг. 16 - Массажер, вид В на фиг. 1, угол β между продольными осями рамы и корпуса меньше 180°.
Фиг. 17 - Массажер, разрез Е-Е на фиг. 14.
Фиг. 18 - Массажер, узел цилиндрических массажных роликов, продольный разрез, выполнение с возможностью переустановки центрального шарнира вдоль оси стержня.
Фиг. 19 - Массажер, разрез Ж-Ж на фиг.2 18.
Фиг. 20 - Массажер, пример выполнения с двумя парами массажных роликов, разные углы α между полуосями соседних пар массажных роликов.
Фиг. 21 - Массажер, рама выполнена в виде прямоугольника, вид сбоку.
Фиг. 22 - Массажер, рама выполнена в виде прямоугольника, угол α между полуосями массажных роликов равен 180°, вид в плане.
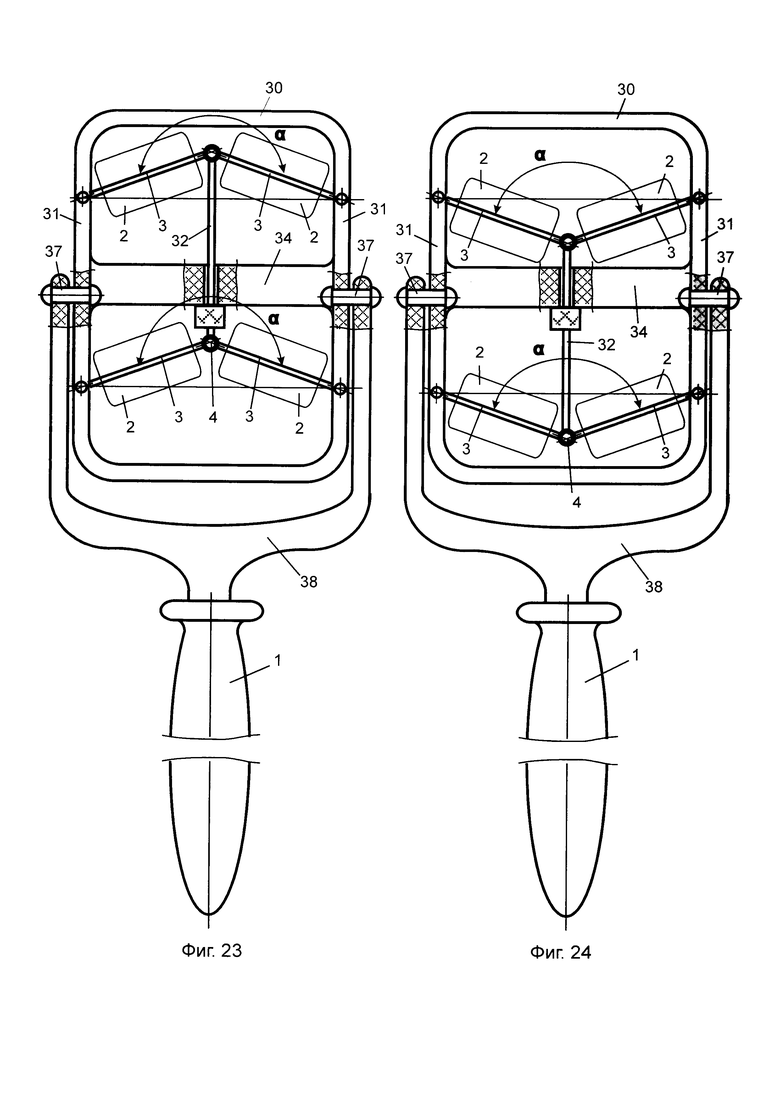
Фиг. 23 - Массажер, рама выполнена в виде прямоугольника, угол α между полуосями массажных роликов больше 180°, вид в плане.
Фиг. 24 - Массажер, рама выполнена в виде прямоугольника, угол α между полуосями массажных роликов меньше 180°, вид в плане.
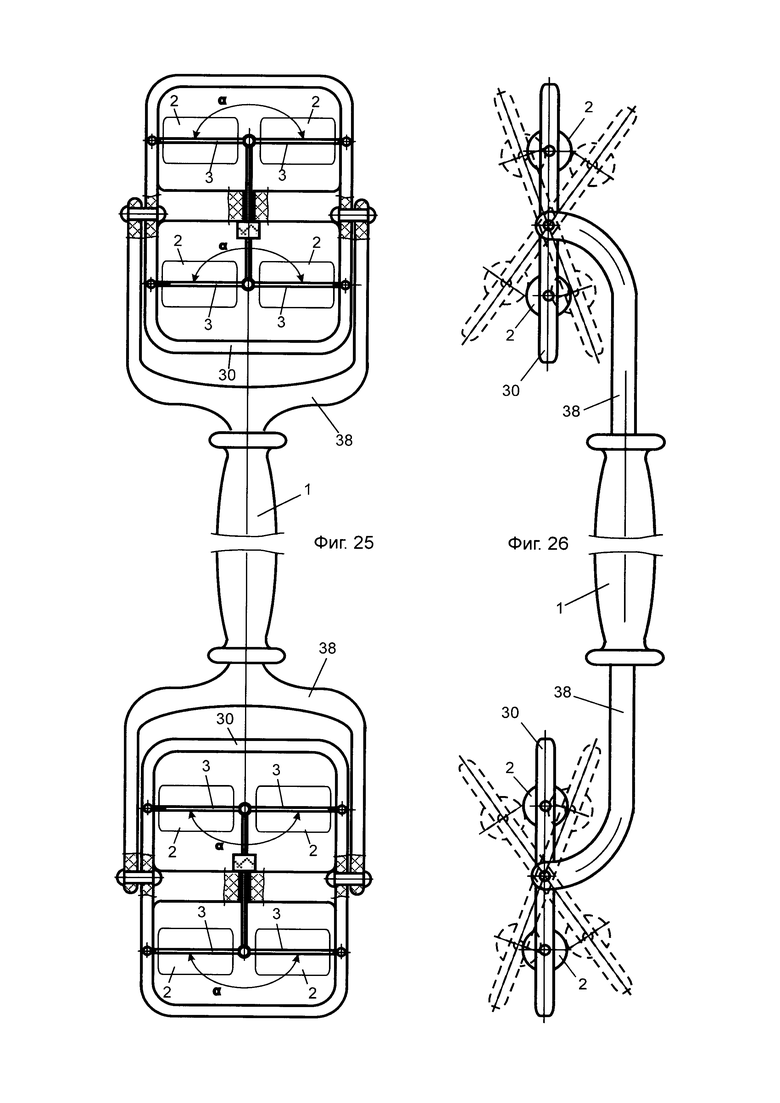
Фиг. 25 - Массажер, выполнение с двумя прямоугольными рамами, шарнирно закрепленными на противоположных сторонах корпуса, вид в плане.
Фиг. 26 - Массажер, выполнение с двумя прямоугольными рамами, шарнирно закрепленными на противоположных сторонах корпуса, вид сбоку.
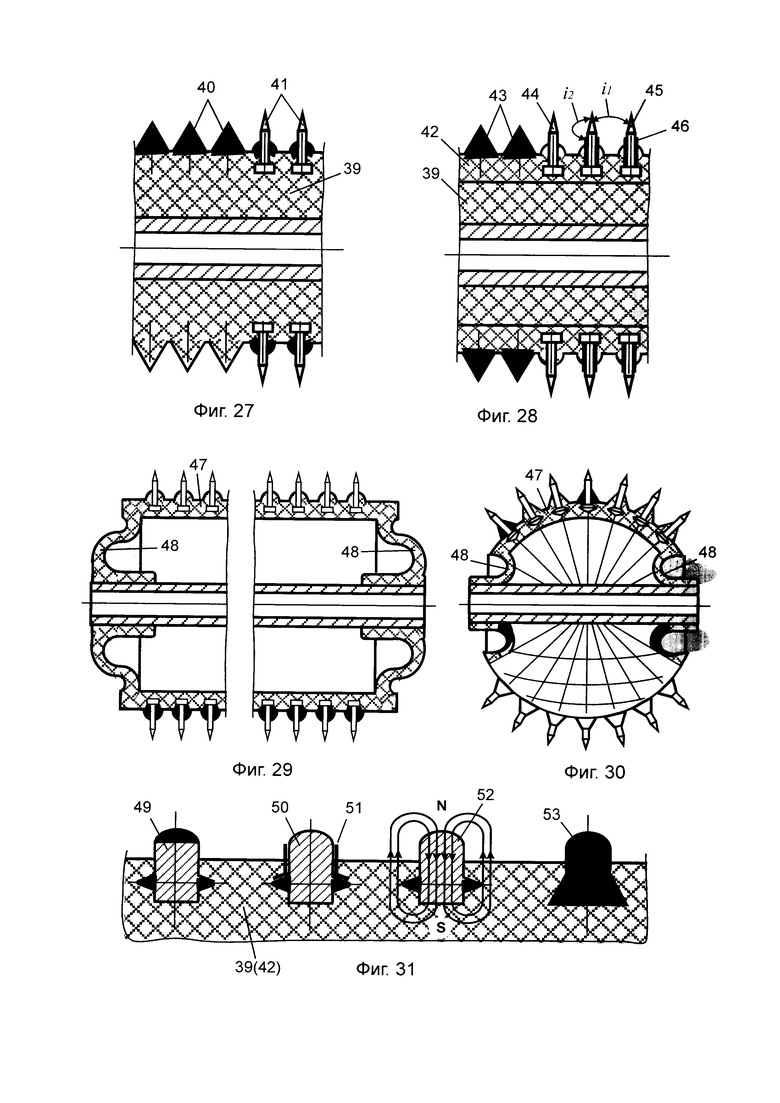
Фиг. 27 - Массажер, пример выполнения ролика с жестким сердечником с шипами или металлическими иглами.
Фиг. 28 - Массажер, пример выполнения ролика с жестким сердечником и эластичным основанием с шипами или металлическими иглами.
Фиг. 29 - Массажер, пример выполнения полого цилиндрического ролика, образованного эластичным основанием и боковыми эластичными диафрагмами.
Фиг. 30 - Массажер, пример выполнения полого сферического ролика, образованного эластичным основанием и боковыми эластичными диафрагмами.
Фиг. 31 - Массажер, примеры выполнения вставок.
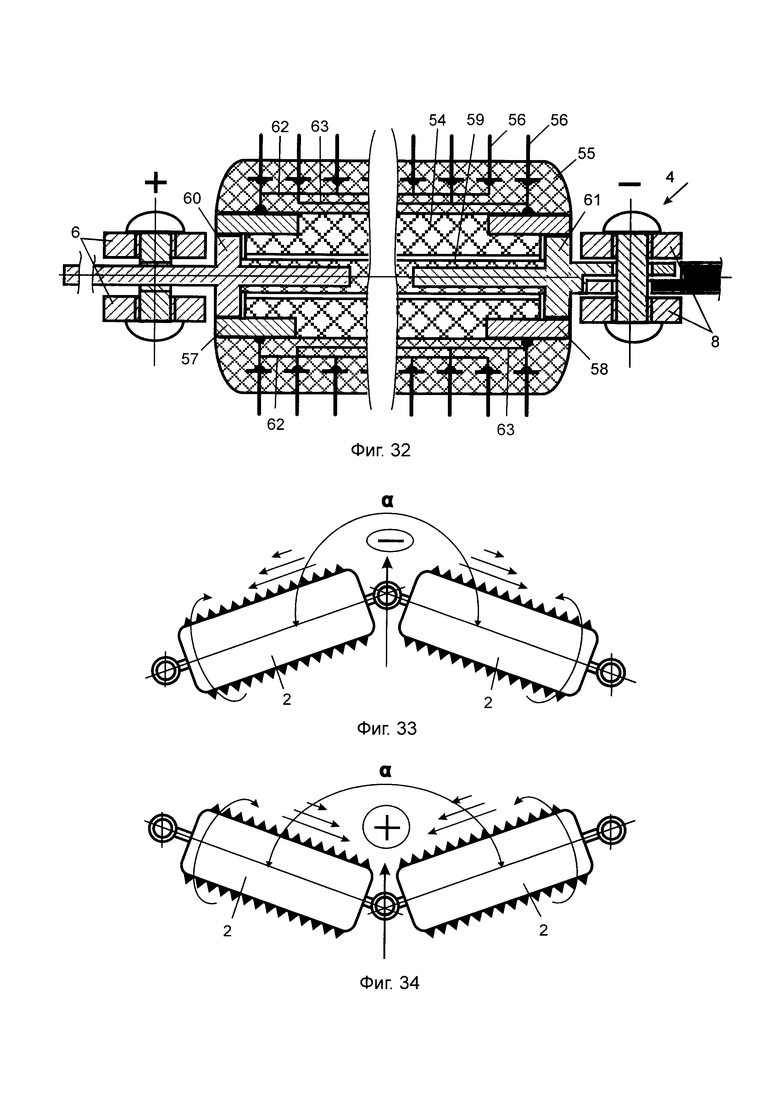
Фиг. 32 - Массажер, выполнен со средствами электрического соединения выбранных групп элементов рефлекторного воздействия с источником электрических сигналов.
Фиг. 33 - Массажер, схема воздействия массажных роликов на тело пользователя, растяжение мягких тканей.
Фиг. 34 - Массажер, схема воздействия массажных роликов на тело пользователя, сжатие мягких тканей.
На фиг. 1 показан пример массажера, который содержит корпус 1, выполненный с возможностью удержания массажера в руке пользователя (выполненный в виде рукоятки), одну пару массажных роликов 2, установленных с возможностью вращения на полуосях 3, соединенных с помощью центрального шарнира 4 с возможностью изменения и фиксации угла α между полуосями 3.
Средства изменения и фиксации угла α между полуосями 3 включают раму 5, шарнирно соединенную с корпусом 1, свободные концы 6 которой шарнирно соединены со свободными концами 7 соответствующих полуосей 3, а также стержень 8, соединенный с центральным шарниром 4 и установленный в направляющей 9 рамы 5 с возможностью перемещения вдоль продольной оси 10 рамы 5 и фиксации в выбранном положении. Средства фиксации стержня 8 в выбранном положении выполнены в виде цангового патрона 11, закрепленного на направляющей 9. Рама 5 шарнирно соединена с корпусом 1 с помощью зажимного шарнира 12. На фиг. 1 угол α равен 180°. На фиг. 2 показан аналогичный массажер, в котором значение угла α меньше 180°. На фиг. 3 показан аналогичный массажер, в котором значение угла α больше 180°.
Таким образом, шарнирное соединение свободных концов 6 рамы 5 со свободными концами 7 соответствующих полуосей 3, а также соединение центрального шарнира 4 полуосей 3 со стержнем 8, установленным в направляющей 9 рамы 5, позволяют плавно изменять угол α между полуосями 3 за счет перемещения центрального шарнира 4 вдоль продольной оси 10 рамы 5 в ту или иную сторону, а также фиксацию выбранного значения угла α цанговым патроном 11.
На фиг. 4 показан массажер, который содержит две рамы 5, шарнирно закрепленные с помощью зажимных шарниров 12 на противоположных сторонах корпуса 1. На каждой раме 5 установлены указанным выше образом пары регулируемых массажных роликов 2.
Зажимные шарниры 12 позволяют изменять и фиксировать в выбранном положении угол β между продольной осью корпуса 1 и продольной осью рамы 5. Изменяя угол β, выбирают положение рамы 5 относительно корпуса 1, наиболее удобное для массажа конкретного криволинейного участка тела пользователя. На фиг. 5 показан фрагмент массажера с различными углами β (в пределах от 0 до 90 градусов). То есть, становиться возможным изменение угла α между полуосями 3 в разных плоскостях - в плоскости продольной оси корпуса 1, когда угол β равен 0 градусов, а также в плоскостях, наклонных к продольной оси корпуса 1 под заданным углом β, что повышает эффективность массажа криволинейных участков тела пользователя (например, голеней, бедер, рук и т.д.) за счет увеличения линии контакта массажных роликов 2 с телом пользователя (фиг. 6).
На свободных концах 6 рамы 5 может быть установлено несколько пар, например две пары массажных роликов 2, на полуосях 3, центральные шарниры 4 которых соединены со стержнем 8 с возможностью перемещения вдоль продольной оси 10 рамы 5 и фиксации в выбранном положении цанговым патроном 11. Примеры указанного выполнения с различными углами α между полуосями 3 показаны на фиг. 7-9. Такое выполнение повышает эффективность массажера.
Массажные ролики могут быть выполнены, например, в виде цилиндров или сфер.
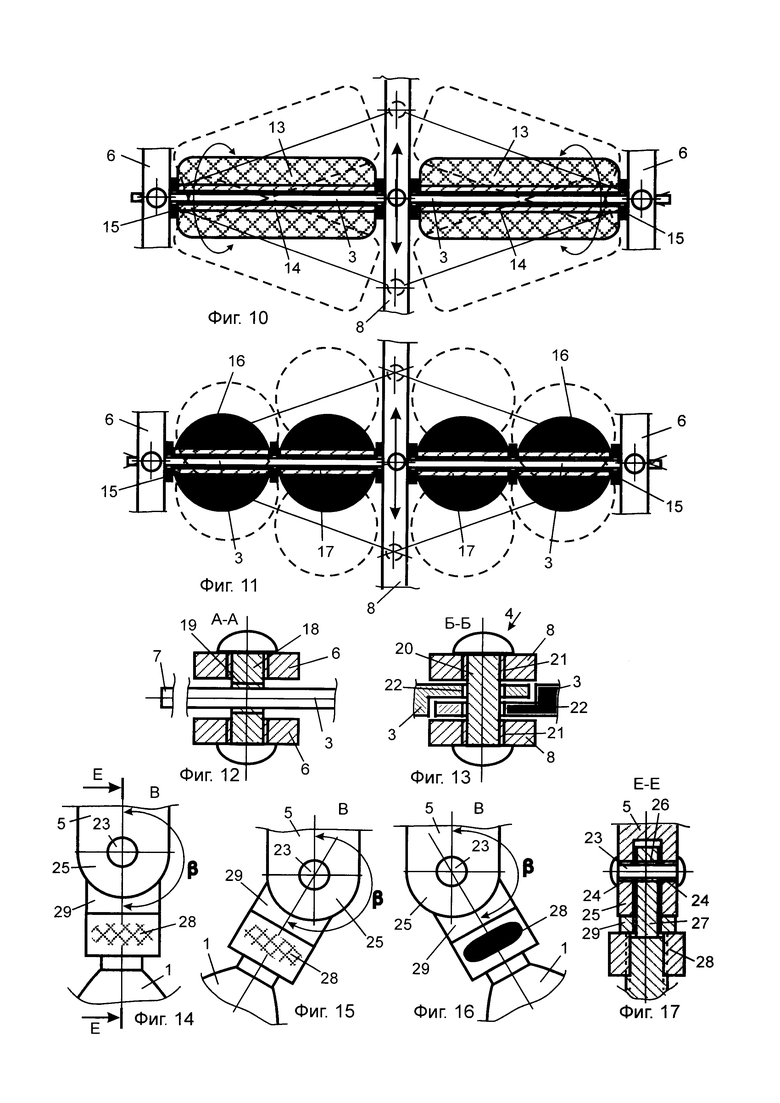
На фиг. 10 в продольном разрезе показан узел цилиндрических массажных роликов 13. Ролики 13 закреплены на трубках 14, в которых расположены полуоси 3. По торцам роликов 13 установлены упорные шайбы 15. Ролики 13 вместе с трубками 14 могут вращаться вокруг полуосей 3.
На фиг. 11 в продольном разрезе показан узел сферических массажных роликов 16. Ролики 16 закреплены на трубках 17, в которых расположены полуоси 3. По торцам роликов 16 установлены упорные шайбы 15. Ролики 16 вместе с трубками 17 могут вращаться вокруг полуосей 3.
Каждое шарнирное соединение свободного конца 6 рамы 5 со свободным концом 7 соответствующей полуоси 3 выполнено в виде цилиндрического шарнира, в шарнирной оси 18 которого выполнено поперечное отверстие 19, в котором расположен свободный конец 7 соответствующей полуоси 3 с возможностью перемещения в указанном отверстии 19 (фиг. 12).
Центральный шарнир 4 полуосей 3 содержит шарнирную ось 20, которая проходит через отверстия 21, выполненные в стержне 8, и отверстия 22, выполненные в полуосях 3, обеспечивая взаимный поворот полуосей 3 с изменением угла α при перемещении центрального шарнира вдоль оси 10 (фиг. 13).
Зажимной шарнир 12, включает шарнирную ось 23, которая проходит через отверстия 24 в концевом участке 25 рамы 5 и через отверстие 26 в хвостовике 27 корпуса 1, зажимную гайку 28, навинченную на хвостовик 27, и фигурную упорную вставку 29, расположенную между концевым участком 25 рамы 5 и зажимной гайкой 28. При отпущенной зажимной гайке 28 проворачивают раму 5 и корпус 1 относительно друг друга, устанавливая необходимый угол β между продольными осями рамы 5 и корпуса 1. Завинчивая гайку 28, зажимают упорную вставку 29 между гайкой 28 и концевым участком 25 рамы 5, обеспечивая стопорение зажимного шарнира 12 и фиксацию выбранного угла β (фиг. 14-17).
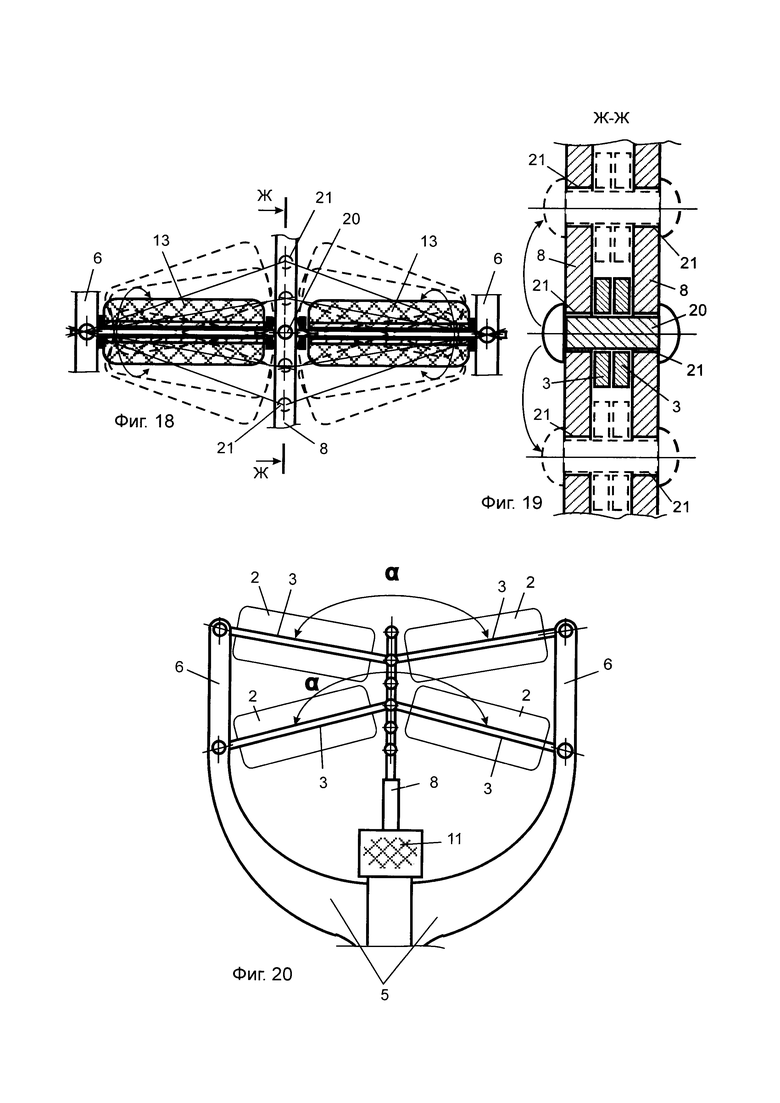
Центральный шарнир 4 полуосей 3 может быть выполнен с возможностью переустановки вдоль оси соединенного с ним стержня 8 путем переустановки шарнирной оси 20 в отверстиях 21, выполненных вдоль оси стержня 8 (фиг. 18, 19). Такое выполнение позволяет устанавливать разные углы α между полуосями 3 в соседних парах роликов 2 (фиг. 20).
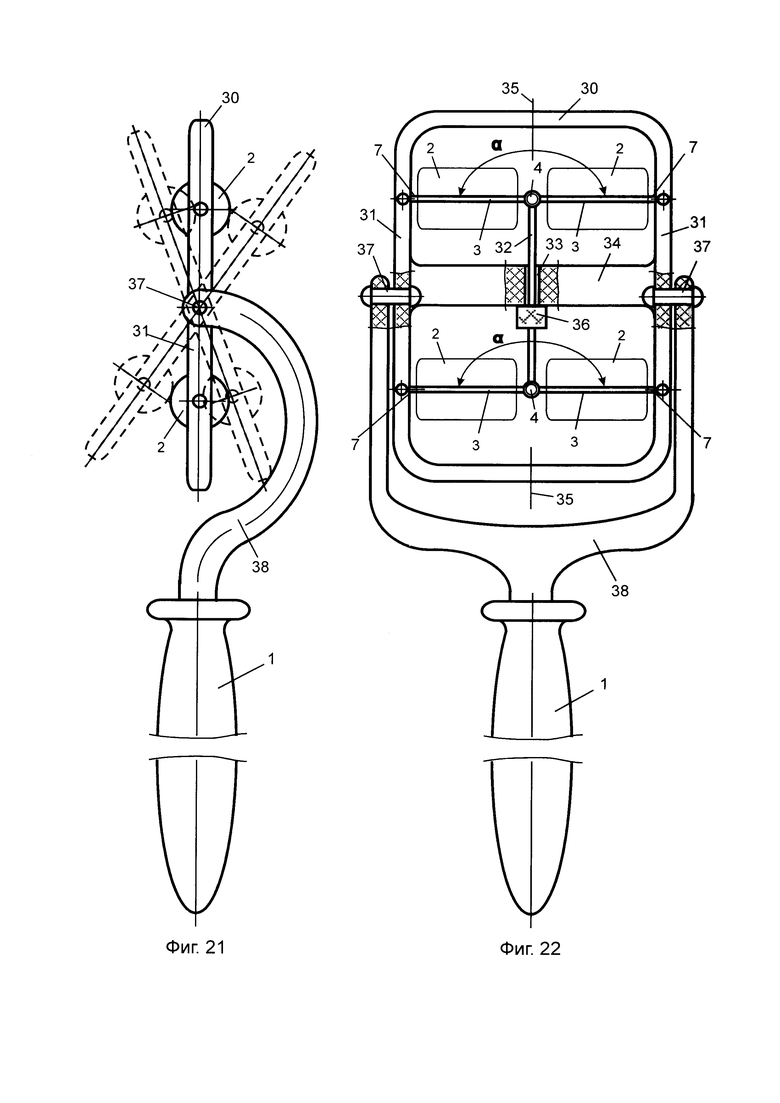
На фиг. 21-24 показан пример массажера, который содержит корпус 1, две пары массажных роликов 2, установленных с возможностью вращения на полуосях 3, соединенных с помощью центральных шарниров 4 с возможностью изменения и фиксации угла α между полуосями 3. Средства изменения и фиксации угла α между полуосями 3 включают прямоугольную раму 30, продольные элементы 31 которой шарнирно соединены со свободными концами 7 соответствующих полуосей 3, а также стержень 32, соединенный с центральными шарнирами 4 и установленный в направляющем отверстии 33 поперечного элемента 34 рамы 30 с возможностью перемещения вдоль продольной оси 35 рамы 30. Средства фиксации стержня 32 в выбранном положении выполнены в виде цангового патрона 36, закрепленного на поперечном элементе 34 рамы 30. Рама 30 шарнирно соединена с корпусом 1 с помощью шарниров 37 и вильчатого кронштейна 38. Выполнение шарнирных соединений продольных элементов 31 со свободными концами 7 соответствующих полуосей 3 показано на фиг. 12. Выполнение центральных шарниров 4 показано на фиг. 13. На фиг. 22 угол α равен 180°. На фиг. 23 показан аналогичный массажер, в котором значение угла α больше 180°. На фиг. 24 показан аналогичный массажер, в котором значение угла α меньше 180°.
На фиг. 25, 26 показан массажер, который содержит два вильчатых кронштейна 38, закрепленных на противоположных сторонах корпуса 1. На каждом вильчатом кронштейне 38 шарнирно закреплена рама 30 с установленными на ней указанным выше образом парами массажных роликов 2.
Массажные ролики могут быть выполнены в виде жесткого сердечника 39 с элементами рефлекторного воздействия - шипами 40 и/или металлическими иглами 41 (фиг. 27), или в виде жесткого сердечника 39, на котором закреплено эластичное основание 42 с элементами рефлекторного воздействия - шипами 43 и/или металлическими иглами 44 (фиг. 28). Соседние иглы выполнены из различных металлов, образующих гальванические пары, которые при контакте с кожей пользователя генерируют гальванические микротоки i1 Металлические иглы могут быть выполнены с частичным покрытием (игла 45 с покрытием 46), электрохимический потенциал которого отличается от электрохимического потенциала материала иглы. Игла 45 с покрытием 46 образуют гальваническую пару, которая при контакте с кожей пользователя генерирует гальванические микротоки i2. Микротоки i1, i2 вызывают известные эффекты гальванизации кожи и гальванического электрофореза (фиг. 28).
Массажные ролики могут быть выполнены в виде полого тела вращения, образованного эластичным основанием 47 с элементами рефлекторного воздействия и боковыми эластичными диафрагмами 48 (фиг. 29, 30). Такие массажные ролики могут адаптироваться к криволинейности тела, обеспечивая равномерное массажное воздействие на криволинейные участки тела пользователя.
Элементы рефлекторного воздействия могут быть выполнены в виде вставок, закрепленных в жестком сердечнике 39 или эластичном основании 42, при этом вставки могут быть металлическими (49), и/или металлическими (50), по меньшей мере, с одним частичным покрытием (51), электрохимический потенциал которого отличается от электрохимического потенциала материала вставки, и/или из магнитного материала (52), и/или из природных минералов (53) - (фиг. 31).
На фиг. 32 показан фрагмент массажера, выполненного со средствами электрического соединения выбранных групп элементов рефлекторного воздействия с источником электрических сигналов. Массажный ролик содержит цилиндрический жесткий сердечник 54, выполненный из электроизоляционного материала, на котором закреплено эластичное основание 55. В эластичном основании 55 закреплены металлические иглы 56, как элементы рефлекторного воздействия на тело пользователя. Соседние иглы 56 выполнены из разных металлов или имеют покрытия с разными электрохимическими потенциалами. На торцах сердечника 54 закреплены электропроводяще кольца 57, 58. Сердечник 54 установлен на полуоси 59 с возможностью вращения. Концевые участки полуоси 59 выполнены в виде электропроводных вставок 60, 61. Вставка 60 контактирует с кольцом 57 и электрически соединена со свободным концом 6 рамы 5. Вставка 61 контактирует с кольцом 58 и электрически соединена с центральным шарниром 4 полуосей. Иглы 56 одних поперечных рядов электрически соединены проводниками 62 с кольцом 57. Иглы 56 других (соседних) поперечных рядов электрически соединены проводниками 63 с кольцом 58. При электрическом соединении свободного конца 6 рамы 5 с центральным шарниром 4 соседние иглы 56 образуют гальванические пары, которые при контакте с кожей пользователя обеспечивают известные эффекты гальванизации кожи и гальванического электрофореза. При подключении свободного конца 6 рамы 5 и центрального шарнира 4 к разноименным полюсам источника электрических сигналов соседние иглы 56 выполняют функции двухполярных электродов, с помощью которых воздействуют на тело пользователя электрическими сигналами разной величины и формы. Указанное расширяет факторы рефлекторного воздействия массажера на тело пользователя.
При движении массажера по телу пациента происходит деформация мягких тканей путем растяжения массируемой полосы с образованием растянутой зоны (-) в средней части полосы при значениях угла α больше 180° (фиг. 33), или путем сжатия с образованием сжатой зоны (+) в средней части полосы при значениях угла α меньше 180° (фиг. 34).
Конструктивные особенности массажера обеспечивает разнообразие массажных манипуляций, включающих приемы акупрессуры (динамический «игольчатый душ») и классического массажа (разминание, растягивание, сжатие мягких тканей). Кроме того, массажер может воздействовать на тело пользователя и другими физиотерапевтическими факторами - гальваническими микротоками, вызывающими известные эффекты гальванизации кожи и гальванического электрофореза, электрическими сигналами различной величины и формы. Все это обеспечивает высокую эффективность заявляемого массажера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Массажер | 2019 |
|
RU2711495C1 |
| Массажер | 2019 |
|
RU2722405C1 |
| Аппликатор для рефлексотерапии | 2019 |
|
RU2734132C2 |
| Аппликатор для рефлексотерапии | 2019 |
|
RU2716355C1 |
| Игла и аппликатор для рефлексотерапии | 2019 |
|
RU2734130C2 |
| Основа игольчатого аппликатора для рефлексотерапии | 2019 |
|
RU2715670C1 |
| Аппликатор для рефлексотерапии | 2019 |
|
RU2734131C2 |
| Модуль аппликатора для рефлексотерапии | 2019 |
|
RU2716481C1 |
| Основа аппликатора для рефлексотерапии | 2020 |
|
RU2743331C1 |
| Узел крепления иглы в основе игольчатого аппликатора и игольчатый аппликатор для рефлексотерапии | 2020 |
|
RU2746899C1 |
Изобретение относится к медицинской технике, к устройствам для массажа, в частности к валиковым массажерам, и может быть использовано как средство для рефлексотерапевтического воздействия на организм человека в лечебных и профилактических целях. Массажер содержит корпус, по меньшей мере одну пару массажных роликов, установленных с возможностью вращения на полуосях, соединенных с помощью центрального шарнира с возможностью изменения угла между ними, а также средства изменения и фиксации угла между указанными полуосями. Средства изменения и фиксации угла между полуосями выполнены в виде рамы, шарнирно соединенной с корпусом, свободные концы полуосей шарнирно соединены с продольными элементами рамы. Центральный шарнир полуосей соединен со стержнем, установленным в направляющих рамы с возможностью перемещения вдоль продольной оси рамы и фиксации в выбранном положении. Изобретение позволяет повысить эффективность массажа. 10 з.п. ф-лы, 34 ил.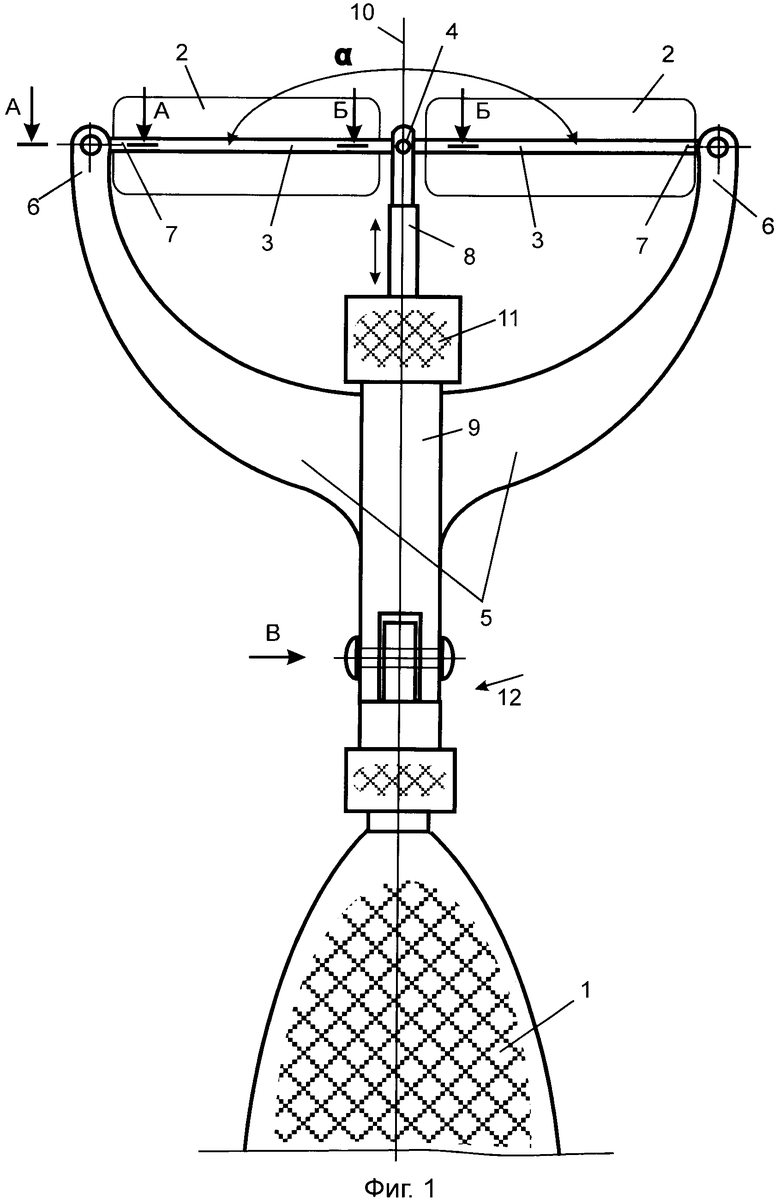
1. Массажер, содержащий корпус, по меньшей мере одну пару массажных роликов, установленных с возможностью вращения на полуосях, соединенных с помощью центрального шарнира с возможностью изменения угла между ними, а также средства изменения и фиксации угла между указанными полуосями,
отличающийся тем,
что средства изменения и фиксации угла между полуосями выполнены в виде рамы, шарнирно соединенной с корпусом, свободные концы полуосей шарнирно соединены с продольными элементами рамы, а центральный шарнир полуосей соединен со стержнем, установленным в направляющих рамы с возможностью перемещения вдоль продольной оси рамы и фиксации в выбранном положении.
2. Массажер по п. 1, отличающийся тем, что центральный шарнир полуосей выполнен с возможностью переустановки вдоль оси соединенного с ним стержня.
3. Массажер по п. 1, отличающийся тем, что массажные ролики выполнены в виде тел вращения, преимущественно, цилиндрической и/или сферической формы.
4. Массажер по п. 1, отличающийся тем, что массажные ролики выполнены в виде жесткого сердечника с элементами рефлекторного воздействия.
5. Массажер по п. 1, отличающийся тем, что массажные ролики выполнены в виде жесткого сердечника, на котором закреплено эластичное основание с элементами рефлекторного воздействия.
6. Массажер по п. 1, отличающийся тем, что массажные ролики выполнены в виде полого тела вращения, образованного эластичным основанием с элементами рефлекторного воздействия и боковыми эластичными диафрагмами.
7. Массажер по любому из пп. 4, 5, 6, отличающийся тем, что элементы рефлекторного воздействия представляют собой шипы, выполненные за одно целое с жестким сердечником или эластичным основанием.
8. Массажер по любому из пп. 4, 5, 6, отличающийся тем, что элементы рефлекторного воздействия представляют собой металлические иглы, закрепленные в жестком сердечнике или эластичном основании и выполненные из разных металлов.
9. Массажер по любому из пп. 4, 5, 6, отличающийся тем, что элементы рефлекторного воздействия представляют собой металлические иглы, закрепленные в жестком сердечнике или эластичном основании и выполненные с по меньшей мере одним частичным покрытием, электрохимический потенциал которого отличается от электрохимического потенциала материала иглы.
10. Массажер по любому из пп. 4, 5, 6, отличающийся тем, что элементы рефлекторного воздействия представляют собой вставки, закрепленные в жестком сердечнике или эластичном основании, при этом вставки выполнены металлическими, и/или металлическими с по меньшей мере одним частичным покрытием, электрохимический потенциал которого отличается от электрохимического потенциала материала вставки, и/или из магнитного материала, и/или из природных минералов.
11. Массажер по любому из пп. 4, 5, 6, отличающийся тем, что выполнен со средствами электрического соединения выбранных групп элементов рефлекторного воздействия с источником электрических сигналов.
| US 2006276732 A1, 07.12.2006 | |||
| МЕХАНИЧЕСКИЙ МАССАЖЕР | 1999 |
|
RU2177298C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 2017319429 A1, 09.11.2017 | |||
| Анемометр | 1935 |
|
SU44050A1 |

