Изобретение относится к информационно-измерительной технике, в частности к магнитометрии, и может быть использовано для измерения характеристик динамических магнитных полей, а также для получения распределений магнитных полей в пространстве и во времени и визуализации их изображений с использованием процедуры вычислительной томoгpaфии.
Известно устройство для топографии магнитного поля [1], содержащее полупроводниковую пластину с размещенной на ней матрицей, состоящей из столбцов и строк взаимосвязанных элементов. При этом измерение магнитного поля, благодаря матричной регулярной структуре, осуществляется одновременно в большом числе точек плоскости. Однако известное устройство позволяет получить только одну составляющую вектора магнитной индукции, одинаково направленную с нормалью к полупроводниковой пластине. Кроме того, устройство имеет ограничения по количеству согласованных точечных датчиков (элементов).
Известно устройство для сканирования магнитных полей [2], содержащее матрицу чувствительных элементов, включающую N феррозондов, в котором измерение магнитного поля осуществляется поочередно в большом числе точек плоскости с последующей обработкой измеряемых напряжений с помощью ЭВМ. Однако известное устройство позволяет получить только одну (из трех) составляющую вектора магнитной индукции. Кроме того, устройство имеет ограничения по количеству феррозондов и, как следствие, по разрешающей способности.
Наиболее близким к заявляемому является устройство для измерения и топографии магнитных полей рассеяния вблизи поверхности объекта исследований [3] , содержащее измерительно-вычислительный блок, общую шину, шаговые двигатели и их блоки управления и питания, измерительный преобразователь магнитной индукции, трехкомпонентный датчик Холла, тензодатчики микроперемещений, блок механических перемещений с редукторами и передающими винтами, поворотный столик, три подвижные каретки, формирователь импульсов, генератор питающего напряжения. В указанном устройстве измерение магнитного поля основано на последовательном перемещении в соответствии с заданной траекторией при помощи измерительной штанги одного трехкомпонентного датчика Холла относительно объекта измерения посредством блока механических перемещений с последующей статистической обработкой результатов измерения измерительно-вычислительным блоком. Однако известное устройство требует многократных измерений в каждой точке, в силу чего процедура становится трудоемкой и продолжительной во времени. Кроме того, используемый статистический подход предусматривающий усреднение, не позволяет получать распределений, характеризующих мгновенное состояние переменного магнитного поля.
Техническим результатом изобретения является расширение функциональных возможностей, заключающееся в обеспечении измерения компонент вектора магнитной индукции в любых отдельных точках, а также в получении распределений индукции магнитного поля как в сечениях, так и в объеме пространства излучения источника с возможностью визуализации изображений этих распределений. Сущность заявленного изобретения заключается в том, что устройство содержит шаговые двигатели, подключенные к блокам управления, подсоединенный к первому шаговому двигателю передающий винт, а также источник периодических магнитных полей, размещенный на поворотном столике. Технический результат достигается также тем, что в устройство введены два измерительных контура в виде ортогонально ориентированных друг относительно друга узких прямоугольных рамок, механически жестко связанных с механизмом двухкоординатного позиционирования и соединенных с ним соответственно через горизонтальную и вертикальную направляющие. В устройство также введены второй и третий шаговые двигатели, блоки управления шаговыми двигателями, электронно-вычислительная машина, соединенная с выходами интерфейса, подсоединенного через формирователь импульса синхронизации к источнику периодических магнитных полей, двухканальный аналого-цифровой преобразователь, две выходные шины данных которого соединены с интерфейсом. Выходы измерительных контуров подключены к усилителям, выходы которых соединены с входами двухканального аналого-цифрового преобразователя, причем передающий винт соединен с вращающим механизмом, на котором закреплен поворотный столик. На всех шаговых двигателях закреплены блоки концевых выключателей, выходы которых подключены к интерфейсу, выходы интерфейса через блоки управления подключены к шаговым двигателям, блоки управления шаговыми двигателями, формирователь импульса синхронизации и электронно-вычислительная машина выполнены так, что обеспечиваются поочередные последовательные дискретные поступательные перемещения с заданным шагом механизма двухкоординатного позиционирования и повороты поворотного столика относительно источника периодических магнитных полей с шагом угла поворота и измерение после каждого поступательного шагового перемещения наводимых в измерительных контурах напряжений. При этом электронно-вычислительная машина обеспечивает измерение компонент вектора магнитной индукции в любых отдельных точках и реконструкцию изображения распределения модуля магнитной индукции в координатах источника периодических магнитных полей.
На фиг. 1 представлена структурная схема устройства.
Устройство содержит ортогонально-ориентированные в пространстве прямоугольные измерительные контуры 1 и 2, усилители 3 и 4, двухканальный аналого-цифровой преобразователь (АЦП) 5, интерфейс: блоки управления 7, 8, 9 шаговыми двигателями , шаговые двигатели 10, 11, 12, блоки 13, 14, 15 концевых выключателей , механизм двухкоординатного позиционирования, 16, вращающий механизм 17, поворотный столик 18, источник излучения магнитных полей 19, формирователь импульса синхронизации 20, электронно-вычислительную машину (ЭВМ) 21, горизонтальную направляющую 22, вертикальную направляющую 23, передающий винт 24, выходные шины аналого-цифрового преобразователя 25, 26.
ЭВМ 21 соединена с интерфейсом 6, выходы которого подключены через блоки управления 7, 8, 9, к шаговым двигателям 10, 11, 12. Источник излучения магнитных полей 19 размещен на поворотном столике 18. Два измерительных контура 1 и 2, выполненные в виде ортогонально ориентированных друг относительно друга узких прямоугольных рамок, механически жестко связаны с механизмом двухкоординатного позиционирования 16. При этом электрические выходы контуров 1 и 2 подключены соответственно к усилителям 3 и 4, выходы которых соединены с входами двухканального АЦП 5. Две выходные шины данных 25, 26 АЦП 5 соединены с интерфейсом 6. Шаговый двигатель 10 через передающий винт 24 соединен с вращающим механизмом 17, на котором закреплен поворотный столик 18. Шаговые двигатели 11 и 12 соединены соответственно через горизонтальную 22 и вертикальную 23 направляющие с механизмом двухкоординатного позиционирования 16. На всех шаговых двигателях закреплены блоки 13, 14, 15 концевых выключателей, выходы которых подключены к интерфейсу 6, который также подсоединен через формирователь импульса синхронизации 20 к источнику излучения магнитных полей 19.
Устройство функционирует следующим образом.
Дифференциальные сигналы от каждого из двух ортогонально ориентированных измерительных контуров 1 и 2 поступают на усилители 3 и 4 соответственно, где усиливаются до определенного уровня и нормализуются. С выходов усилителей сигналы поступают на входы двухканального аналого-цифрового преобразователя (АЦП) 5, две выходные шины данных 25, 26 которого подключены к входам интерфейса 6, соединенного с ЭВМ 21.
Посредством механизма двухкоординатного позиционирования 16, приводимого в движение шаговым двигателем 11 через горизонтальную направляющую 22 и шаговым двигателем 12 через вертикальную направляющую 23, перемещаются с заданным шагом механически связанные ортогонально-ориентированные измерительные контуры 1 и 2 по горизонтали и по вертикали соответственно. Кроме того, шаговый двигатель 10 через передающий винт 24 и вращающий механизм 17 осуществляет повороты (с заданным угловым шагом) поворотного столика 18, на котором располагается источник излучения исследуемых магнитных полей 19.
Концевые выключатели блока 14, закрепленные на шаговом двигателе 11 (или расположенные на краях горизонтальной направляющей 22), и концевые выключатели блока 15, закрепленные на шаговом двигателе 12 (или расположенные на краях вертикальной направляющей 23), ограничивают движение механизма двухкоординатного позиционирования 16 по горизонтали и по вертикали соответственно. Концевые выключатели блока 13 ограничивают вращение поворотного столика 18. Все выходы концевых выключателей блоков 13, 14, 15 соединены с соответствующими входами интерфейса 6.
Для нахождения общего распределения векторной функции магнитной индукции в объеме пространства излучения объекта используется следующий подход. Исследуемый объем представляется совокупностью параллельных сечений (фиг. 2). Данное условие позволяет понизить размерность задачи, которая сводится после этого к получению распределения магнитной индукции в плоскости сечения.
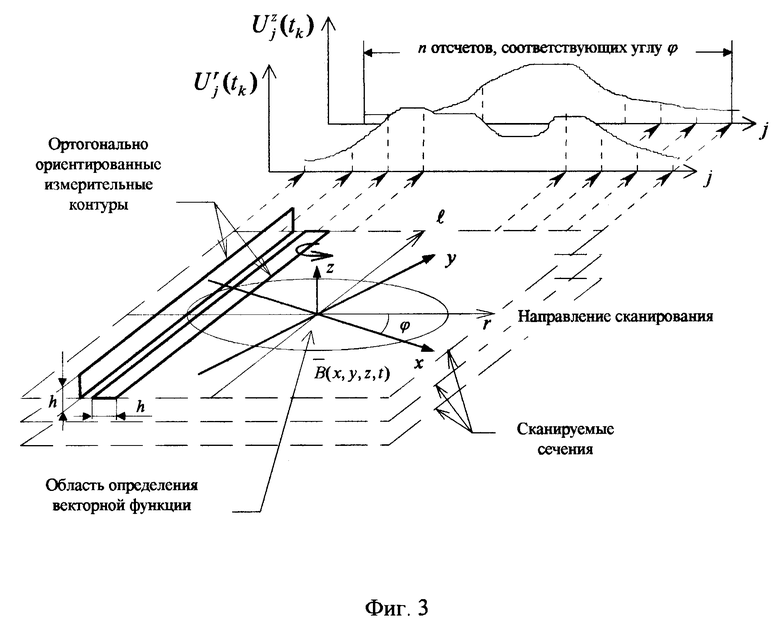
Распределения в плоскости течения получают посредством применения теории вычислительной томотрафии [4] к напряжениям, индуцируемым согласно закону Фарадея в двух ортогонально ориентированных узких прямоугольных контурах шириной h, перемещающихся по сечению в магнитном поле с определенной последовательностью (фиг. 3). В результате распределение в пространстве для каждой из трех компонент векторной функции представляется в виде квадратной матрицы из "n" строк и "n" столбцов (фиг. 2). Каждый элемент матрицы является значением составляющей вектора магнитной индукции, усредненной в пределах элементарной площадки. Необходимо отметить, что, хотя вся последовательность измерений, определяемая методом вычислительной томографии, происходит не мгновенно, поскольку между измерениями имеют место механические перемещения, используемая процедура позволяет получить распределения, характеризующие мгновенные состояния поля. Это происходит благодаря свойству периодичности магнитного поля, точно повторяющего свои значения через одинаковые промежутки времени, равные периоду. Таким образом, если производить соответствующие измерения через интервалы времени, кратные периоду, то в этом случае распределения векторной функции магнитной индукции будут одинаковыми и характеризующими на периоде какое-то одно мгновенное состояние поля.
В отличие от существующих предлагаемое устройство дает возможность избежать измерений в каждой точке и при этом позволяет получить распределения компонент векторной функции магнитной индукции, определенных в любой точке сканируемого сечения и в любой момент времени на протяжении периода. Это удается за счет измерения ряда интегральных значений - магнитных потоков, наводимых в узких контурах для многих, пересекающихся под разными углами траекторий. Для каждого j-го измерения магнитный поток, пронизывающий контур является суммой потоков располагающихся вдоль контура элементарных площадок с соответствующими значениями индукции Bi. Следовательно, для j-го магнитного потока, указанную сумму можно записать в виде уравнения:
где j = 1, 2,...M; aij - весовые коэффициенты, отражающие вклад индукции Bi, i-й элементарной площадки в j-й магнитный поток Φj, пронизывающий контур; N - число элементов в матрице распределения; M - общее число отсчетов (уравнений).
Выражение (1) представляет собой систему из М линейных уравнений с N=n•n неизвестными. Если экспериментальные результаты (отдельные уравнения) линейно независимы и число уравнений М равно числу неизвестных N, то система имеет единственное решение, которое может быть получено путем обращения матрицы весовых коэффициентов aij:
где i = 1, 2,...N; (aij)-1 - матрица, обратная матрице aij.
Уравнения будут линейно независимыми, если процедуру измерения реализовать следующим способом. Указанные контуры поочередно совершают последовательные дискретные поступательные перемещения с заданным шагом, охватывая тем самым всю исследуемую плоскость сечения, и повороты относительно объекта измерения в интервале от 0 до π с шагом угла поворота ΔΦ = π/n. B ходе такого сканирования после каждого поступательного шагового перемещения измеряются наводимые в рамках напряжения. Полученные таким образом для каждой рамки "n" отсчетов составляют одну линейную" проекцию напряжений, соответствующую определенному углу поворота Φ (фиг. 3). А "n" таких линейных проекций, полученных последовательной и отличающихся углом Φ, позволяют составить для каждой компоненты систему уравнений, решением которой и является распределение в плоскости сечения.
Связь между компонентами магнитного потока в системах координат сканирующих рамок r, l, z и объекта измерения x, y, z определяется следующими выражениями: (13)
(13)
где Φ
Измерение магнитных потоков Φ осуществляется посредством измерительного контура 1, перпендикулярного плоскости сканирования. Причем необходимо учитывать, что в системе уравнений (3) отсчету Φ
осуществляется посредством измерительного контура 1, перпендикулярного плоскости сканирования. Причем необходимо учитывать, что в системе уравнений (3) отсчету Φ осуществляется посредством измерительного контура 2, параллельного плоскости сканирования.
осуществляется посредством измерительного контура 2, параллельного плоскости сканирования.
Напряжение, наводимое в контурах, будет определяться изменением магнитного потока, пронизывающего контур: U = - d Φ /dt. Таким образом, получение распределений x- и y- компонент векторной функции  обеспечивается посредством измерения напряжений Uj r(t) и Uj l(t), наводимых в контуре 1, перпендикулярном плоскости сканирования (фиг. 3). Распределение z-компоненты получается посредством измерения напряжений Uj z(t) с помощью контура 2, параллельного плоскости сканирования. Затем для определения компонент распределения векторной функции магнитной индукции необходимо решить систему уравнений:
обеспечивается посредством измерения напряжений Uj r(t) и Uj l(t), наводимых в контуре 1, перпендикулярном плоскости сканирования (фиг. 3). Распределение z-компоненты получается посредством измерения напряжений Uj z(t) с помощью контура 2, параллельного плоскости сканирования. Затем для определения компонент распределения векторной функции магнитной индукции необходимо решить систему уравнений:
где Bi z(tk), Bi y(tk) и Bi z(tk) - x-, y- и z- компоненты векторной функции магнитной индукции  соответственно; T - период изменения магнитной индукции; m = 1,2,... - номер периода; tk - текущий k-й отсчет в периоде;
соответственно; T - период изменения магнитной индукции; m = 1,2,... - номер периода; tk - текущий k-й отсчет в периоде;  K- число отсчетов на период.
K- число отсчетов на период.
Перед началом измерений ЭВМ 21 через блок управления 9 шаговым двигателем 12 при помощи механизма двухкоординатного позиционирования 16 устанавливает контуры 1 и 2 на уровень по вертикали z=zl, соответствующий заданному l-му сечению, где  L - число возможных сечений по вертикали. Если определяется распределение магнитной индукции в объеме, то устанавливается начальный уровень z=zl.
L - число возможных сечений по вертикали. Если определяется распределение магнитной индукции в объеме, то устанавливается начальный уровень z=zl.
После этого в плоскости установленного сечения под разными углами Φ осуществляется процедура сканирования магнитного поля. Вся процедура сканирования состоит из "n" циклов, где число циклов "n" определяется количеством углов Φ, под которыми необходимо провести сканирование.
Один цикл сканирования заключается в последовательном перемещении с шагом Δr механизма двухкоординатного позиционирования 16 по горизонтальной направляющей 22 из одного крайнего положения в другое (из левого в правое или, наоборот, из правого в левое). В ходе такого сканирования после каждого шага получают необходимые для процедуры вычислительной томографии проекционные данные Uj r(t), Uj l(t) и Uj z(t) (фиг. 3). Кроме того, каждому шагу сканирования присваивается сквозной порядковый номер j (где j = 1...N, a N=n•n - число шагов в одном цикле сканирования).
Каждый q-й цикл сканирования (где q =  начинается с того, что механизм двухкоординатного позиционирования 16 отводится в крайнее положение, о чем свидетельствует сигнал с концевого выключателя блока 14. Кроме того, вращающим механизмом 17, приводимым в движение шаговым двигателем 10 через передающий винт 24, поворотный столик 18 устанавливается в положение, соответствующее углу поворота Φq = (q-1)π/n, о чем также свидетельствует сигнал с концевого выключателя блока 13. Сигналы от концевых выключателей блоков 14 и 13 указывают на то, что система готова к получению проекционных данных в пространстве и во времени. Получение проекционных данных заключается в измерении напряжений, индуцируемых в контурах 1 и 2 согласно закону Фарадея.
начинается с того, что механизм двухкоординатного позиционирования 16 отводится в крайнее положение, о чем свидетельствует сигнал с концевого выключателя блока 14. Кроме того, вращающим механизмом 17, приводимым в движение шаговым двигателем 10 через передающий винт 24, поворотный столик 18 устанавливается в положение, соответствующее углу поворота Φq = (q-1)π/n, о чем также свидетельствует сигнал с концевого выключателя блока 13. Сигналы от концевых выключателей блоков 14 и 13 указывают на то, что система готова к получению проекционных данных в пространстве и во времени. Получение проекционных данных заключается в измерении напряжений, индуцируемых в контурах 1 и 2 согласно закону Фарадея.
Процедура получения проекционных данных во времени для каждого j-го положения механизма двухкоординатного позиционирования 16 в пространстве относительно источника излучения магнитных полей 19 состоит в том, что устройство ожидает сигнала синхронизации с выхода формирователя импульса синхронизации 20. При этом сигнал, поступающий на формирователь импульса синхронизации 20 от источника излучения 19, может быть получен как гальваническим путем, т. е. от устройства, запитывающего излучатель, так и через датчик магнитного поля (на схеме не показано). Как только сигнал синхронизации появляется на входе интерфейса 6, ЭВМ 21 выдает управляющий сигнал для начала процедуры измерения напряжений, характеризующих разные моменты времени на протяжении периода. В течение одного периода Т, через равные интервалы времени Δt производится K измерений. Каждому измерению присваивается порядковый номер k (где k=0...K-1). В ходе каждого k-го измерения опрашиваются оба канала двухканального АЦП 5 и результаты измерения по шинам данных 25 и 26 АЦП 5 через интерфейс 6 передаются в ЭВМ 21, где для каждого контура на j-м шаге полученные данные представляются в виде вектора-столбца размером l х K. Интервал времени Δt, равный T/K, между k-м и (k+1)-м измерением характеризует разрешение по времени и определяется верхней информативной частотой изменения магнитного поля. После того как последнее K-е измерение окончено, ЭВМ 21 через блок управления 8 и шаговый двигатель 11 перемещает механизм двухкоординатного позиционирования 16 на расстояние Δr, характеризующее разрешение в пространстве и определяемое разрешающей способностью системы. После чего для (j+1)-го шага снова ожидается сигнал синхронизации и с его появлением осуществляются следующие K измерений напряжений, наводимых в контурах 1 и 2.
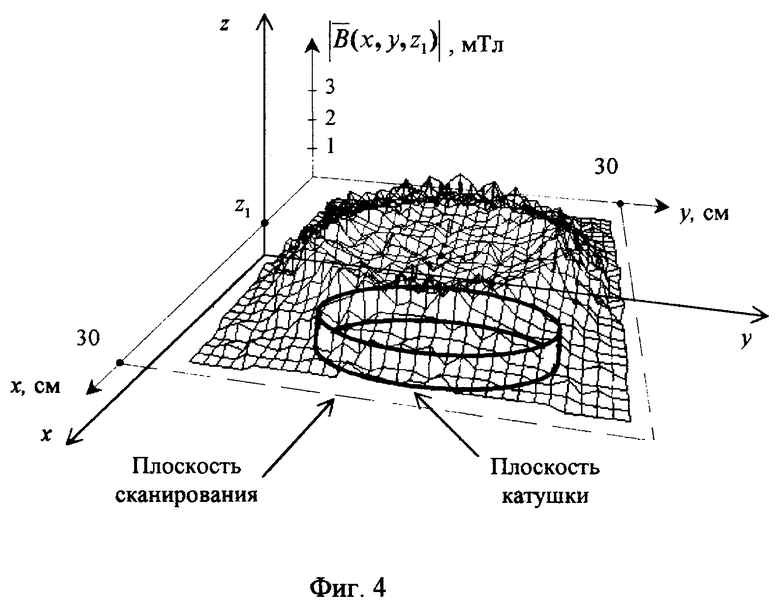
Следовательно, в течение каждого цикла сканирования механизм двухкоординатного позиционирования 16 с шагом Δr проходит весь путь по горизонтальной направляющей 22 от одного концевого выключателя блока 14 до другого. Результаты одного такого цикла сканирования сводятся в массив размером n • K, а "n" циклов с различными углами Φ позволяют получить всю необходимую для реконструкции изображения информацию об источнике излучения магнитного поля 19 в плоскости сечения z=zl. Реконструкция изображения распределения векторной функции магнитной индукции в плоскости сечения z=zl может быть осуществлена в соответствии с системой уравнений (4) с помощью, например, вычислительной среды "Mathcad 5.0 PLUS". В качестве примера на фиг. 4 представлено совмещенное изображение цилиндрической катушки, создающей магнитное поле, а также экспериментально полученное и реконструированное распределение модуля магнитной индукции  в сечении z=zl (в координатах объекта излучения x, y, z, масштабы указаны на осях).
в сечении z=zl (в координатах объекта излучения x, y, z, масштабы указаны на осях).
В результате повторения описанной процедуры по всем сечениям, т.е. L раз, получается массив данных размером LxNxK, позволяющий получить распределение векторной функции индукции магнитного поля объекта излучения на периоде и во всем объеме измерительной установки.
Таким образом, предложенное устройство позволяет осуществлять измерения компонент вектора магнитной индукции в любых отдельных точках в пространстве и во времени, а также получать распределения индукции магнитного поля как в сечениях, так и в объеме пространства излучения источника с возможностью визуализации изображений этих распределений на экране ЭВМ.
Литература
1. Авторское свидетельство СССР N 1652951, кл. G 01 R 33/02, 1991 г.
2. Авторское свидетельство СССР N 1762282, кл. G 01 R 33/02, 1992 г.
3. Авторское свидетельство СССР N 1684761, кл. G 01 R 33/06, 1991 г.
4. Рентгенотехника. Справочник в 2-х книгах. Кн. 2 / Под ред. В.В. Клюева. М.: Машиностроение. с. 319-326.

Использование: в информационно-измерительной технике, в частности в магнитометрии. Технический результат заключается в измерении магнитной индукции в одной точке, а также в получении распределения магнитных полей в пространстве и во времени и визуализации их изображений с использованием алгоритма вычислительной томографии. Устройство содержит шину, шаговые двигатели, подключенные к блокам управления, и подсоединенный к первому двигателю передающий винт, а также источник излучения магнитных полей, размещенный на поворотном столике. В устройство введены дополнительная шина и два измерительных контура в виде ортогонально ориентированных друг относительно друга узких прямоугольных рамок, механически жестко связанных с механизмом двухкоординатного позиционирования. Электрические выходы контуров подключены к усилителям, выходы которых соединены с входами двухканального аналого-цифрового преобразователя, обе выходные шины которого соединены с интерфейсом. Передающий винт соединен с вращающим механизмом, на котором закреплен поворотный столик, второй и третий шаговые двигатели соединены соответственно через горизонтальную и вертикальную направляющие с механизмом двухкоординатного позиционирования. На всех шаговых двигателях закреплены блоки концевых выключателей, выходы которых подключены к интерфейсу, который также подсоединен выходами к электронно-вычислительной машине и через формирователь импульса синхронизации к источнику излучения магнитных полей. 4 ил.
Устройство для измерения периодических магнитных полей и получения их распределений в пространстве и во времени, содержащее шаговые двигатели, подключенные к блокам управления, подсоединенный к первому шаговому двигателю передающий винт, а также источник периодических магнитных полей, размещенный на поворотном столике, отличающееся тем, что в него введены два измерительных контура в виде ортогонально ориентированных друг относительно друга узких прямоугольных рамок, механически жестко связанных с механизмом двухкоординатного позиционирования и соединенных с ним соответственно через горизонтальную и вертикальную направляющие, второй и третий шаговые двигатели, блоки управления шаговыми двигателями, электронно-вычислительная машина, соединенная с выходами интерфейса, подсоединенного через формирователь импульса синхронизации к источнику периодических магнитных полей, двухканальный аналого-цифровой преобразователь, две выходные шины данных которого соединены с интерфейсом, выходы измерительных контуров подключены к усилителям, выходы которых соединены с входами двухканального аналого-цифрового преобразователя, причем передающий винт соединен с вращающим механизмом, на котором закреплен поворотный столик, на всех шаговых двигателях закреплены блоки концевых выключателей, выходы которых подключены к интерфейсу, выходы интерфейса через блоки управления подключены к шаговым двигателям, блоки управления шаговыми двигателями, формирователь импульса синхронизации и электронно-вычислительная машина выполнены так, что обеспечиваются поочередные последовательно дискретные поступательные перемещения с заданным шагом механизма двухкоординатного позиционирования и повороты поворотного столика относительно источника периодических магнитных полей с шагом угла поворота и измерения после каждого поступательного шагового перемещения наводимых в измерительных контурах напряжений, а электронно-вычислительная машина обеспечивает измерение компонент вектора магнитной индукции в любых отдельных точках и реконструкцию изображения распределения модуля магнитной индукции в координатах источника периодических магнитных полей.
| Устройство для измерения и топографии магнитных полей рассеивания вблизи поверхности объекта исследования | 1989 |
|
SU1684761A1 |
| Устройство для сканирования магнитных полей | 1989 |
|
SU1762282A1 |
| Устройство для топографии магнитного поля | 1989 |
|
SU1652951A1 |
| СТРУННАЯ ТРАНСПОРТНАЯ СИСТЕМА ЮНИЦКОГО | 2006 |
|
RU2324612C1 |
| JP 10325858 Al, 08.12.1998 | |||
| Рентгенотехника | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| В.В,КЛЮЕВА | |||
| - М.: Машиностроение, 1992, с.319-329. | |||
