Изобретение относится к информационно-измерительной технике, в частности к магнитоскопии, и может быть использовано для неразрушающего контроля внутренней структуры ферромагнитных изделий и образцов в местах, недоступных для механического проникновения, с целью выявления внутри них пространственного расположения возможных скрытых дефектов, оценки их формы, ориентации, а также геометрических размеров (длины, глубины, раскрытия).
Скрытые дефекты в ферромагнитных изделиях приводят к изменению целостности структуры и появлению внутренних границ разделения сред. Контроль осуществляется благодаря регистрации возникающего на границах сред перераспределения плотности магнитного потока изначально однородного магнитного поля внутри исследуемого ферромагнитного изделия. Так как границы сред характеризуются резкими переходами, скачкообразными изменениями распределения тангенциальной составляющей плотности магнитного потока, то точная локализация экстремумов выявляется пространственным дифференцированием плотности магнитного потока (магнитной индукции).
Визуализация результатов контроля позволяет получить изображение внутренней структуры ферромагнитного изделия посредством применения способа неразрушающего объемного измерения векторной функции магнитной индукции неоднородно распределенного в пространстве и периодически изменяющегося во времени магнитного поля [1], дополненного процедурой дифференцирования исходных проекционных данных по выбранному направлению. Благодаря данной процедуре каждое получаемое изображение представляет собой совокупность скалярных проекций реконструированного распределения продифференцированной плотности магнитного потока B′x, B′y, B′z экстремумами, указывающую на локализацию границ раздела сред, тем самым позволяя выявлять внутренние пространственные расположения возможных скрытых дефектов.
Известен магнитоскоп для неразрушающего контроля сварочных швов [2], содержащий намагничивающее устройство, магнитную ленту и магниточувствительные элементы. Устройство выполнено в виде колеса, которое посажено на поперечную ось радиального рычага и соединено с рычагом возвратным механизмом, причем изготовленное из немагнитного материала колесо имеет обод и центральную втулку, установленные соосно и соединенные одной перемычкой, а в кольцевой желоб обода уложены амортизатор и отрезок магнитной ленты, при этом в нижней части рычага снаружи обода поперек магнитной ленты установлены магниточувствительные элементы, а внутри обода установлен и прикреплен к рычагу электромагнит, обхватывающий обод с двух сторон. Однако известное устройство имеет ограниченное использование и не позволяет выполнять неразрушающий контроль в местах, недоступных для механического проникновения магниточувствительных элементов внутренней структуры ферромагнитных изделий и образцов.
Известно устройство магнитного контроля труб [3], содержащее средство намагничивания труб, строчный магниточувствительный преобразователь, средства считывания, обработки информации и визуализации дефектов. Сканирование осуществляют путем вращения контролируемой трубы вокруг магниточувствительного строчного преобразователя, расположенного внутри герметичного вращающегося барабана, на который нанизана и обкатывается по его наружной поверхности намагниченная контролируемая труба. Однако известное устройство имеет ограниченное использование и не позволяет выполнять неразрушающий контроль в местах, недоступных для механического проникновения магниточувствительных элементов внутренней структуры ферромагнитных изделий и образцов.
Известно устройство магнитного контроля изделий и образцов [4], содержащее средство намагничивания, магниточувствительный преобразователь, средства считывания, предметный стол со столешницей, на которой расположен исследуемый объект. Столешница установлена с возможностью вращения между полюсами средства намагничивания и двумя идентичными параллельно расположенными строчными наборами магниточувствительных элементов. В указанном устройстве намагничивание объекта и сканирование рельефа магнитного поля рассеяния осуществляется путем вращения столешницы предметного столика с расположенным на ней объектом между полюсами U-образного магнита; сканирование рельефа магнитного поля рассеяния осуществляется путем вращения столешницы предметного стола с расположенными на ней образцами между полюсами средства намагничивания и двумя строчными наборами магниточувствительных элементов. Преобразование магнитного поля рассеяния в электрический сигнал и считывание информации осуществляют компенсационным методом за счет того, что оси чувствительности магниточувствительных элементов верхнего набора и нижнего набора направлены на встречу друг другу. Однако известное устройство имеет ограниченное использование и не позволяет выполнять неразрушающий контроль в местах, недоступных для механического проникновения магниточувствительных элементов верхнего и нижних наборов внутренней структуры ферромагнитных изделий и образцов.
Наиболее близким к заявляемому является устройство [5], содержащее шину, шаговые двигатели, подключенные к блокам управления, и подсоединенный к первому двигателю передающий винт, а также источник излучения магнитных полей, размещенный на поворотном столике. В устройство введены дополнительная шина и два измерительных контура в виде ортогонально ориентированных относительно друг друга узких прямоугольных рамок, механически жестко связанных с механизмом двухкоординатного позиционирования. Электрические выходы контуров подключены к усилителям, выходы которых соединены с входами двухканального аналого-цифрового преобразователя, обе выходные шины которого соединены с интерфейсом. Передающий винт соединен с вращающим механизмом, на котором закреплен поворотный столик, второй и третий шаговые двигатели соединены соответственно через горизонтальную и вертикальную направляющие с механизмом двухкоординатного позиционирования. На всех шаговых двигателях закреплены блоки концевых выключателей, выходы которых подключены к интерфейсу, который также подсоединен выходами к электронно-вычислительной машине и через формирователь импульса синхронизации к источнику излучения магнитных полей. Однако известное устройство имеет ограниченное использование и не позволяет выполнять неразрушающий контроль в местах, недоступных для механического проникновения магниточувствительного рабочего органа внутренней структуры ферромагнитных изделий и образцов.
Техническим результатом применения заявляемого устройства является расширение функциональных возможностей магнитоскопии, заключающееся в получении изображения внутренней структуры ферромагнитного изделия посредством применения способа неразрушающего объемного измерения векторной функции магнитной индукции неоднородно распределенного в пространстве и периодически изменяющегося во времени магнитного поля, дополненного процедурой дифференцирования исходных проекционных данных по выбранному направлению, благодаря которой реконструированное распределение продифференцированной плотности магнитного потока B′x, B′y, B′z экстремумами указывает на локализацию границ раздела сред.
Сущность изобретения заключается в том, что устройство содержит формирователь импульса синхронизации, шину данных, ПЭВМ, соединенную с выходами интерфейса, систему позиционирования, состоящую из двух шаговых двигателей, подключенных к блокам управления, подсоединенный к первому шаговому двигателю передающий винт, соединенный с поворотным механизмом, блоки концевых выключателей, закрепленных на двигателях.
Технический результат устройства для неразрушающей дифференциальной векторной трехмерной магнитоскопии достигается тем, что в него введены генератор периодического тока, источник излучения однородного магнитного поля, индуктивно связанные с ним множество плоских круглых измерительных контуров, жестко закрепленных на раздвижном каркасе и реализованных в виде катушек индуктивности, параллельно расположенных относительно друг друга, причем их размеры задаются таким образом, чтобы каждый измерительный контур огибал границы сферы, описанной вокруг исследуемого объема. Выводы этих контуров подключены к входам аналоговых интеграторов, выходы которых через усилители соединены с соответствующими сигнальными входами коммутатора, причем единственный сигнальный выход коммутатора подключен к аналоговому входу одноканального АЦП. Механизм позиционирования дополнен передающим винтом и наклонным механизмом, выполненным так, чтобы обеспечивать поочередные последовательные дискретные поступательные зенитные наклоны и азимутальные повороты с заданными шагами раздвижного каркаса относительно предметного столика с размещенным на нем ферромагнитным изделием, сопровождающиеся процедурой формирования текущей проекции потоков для заданных зенитных и азимутальных углов. Персональная электронно-вычислительная машина посредством интерфейса выдает сигналы управления коммутатором и позиционированием раздвижного каркаса, обеспечивает управление частотой, амплитудой и формой выходного тока генератора периодического тока, а также реализует обработку каждой текущей проекции потоков, продифференцированной по выбранному направлению с последующей визуализацией результатов процесса неразрушающего контроля внутренней структуры ферромагнитного изделия, позволяющей выявлять локализацию границ раздела сред посредством определения экстремумов реконструируемого распределения продифференцированной плотности магнитного потока.
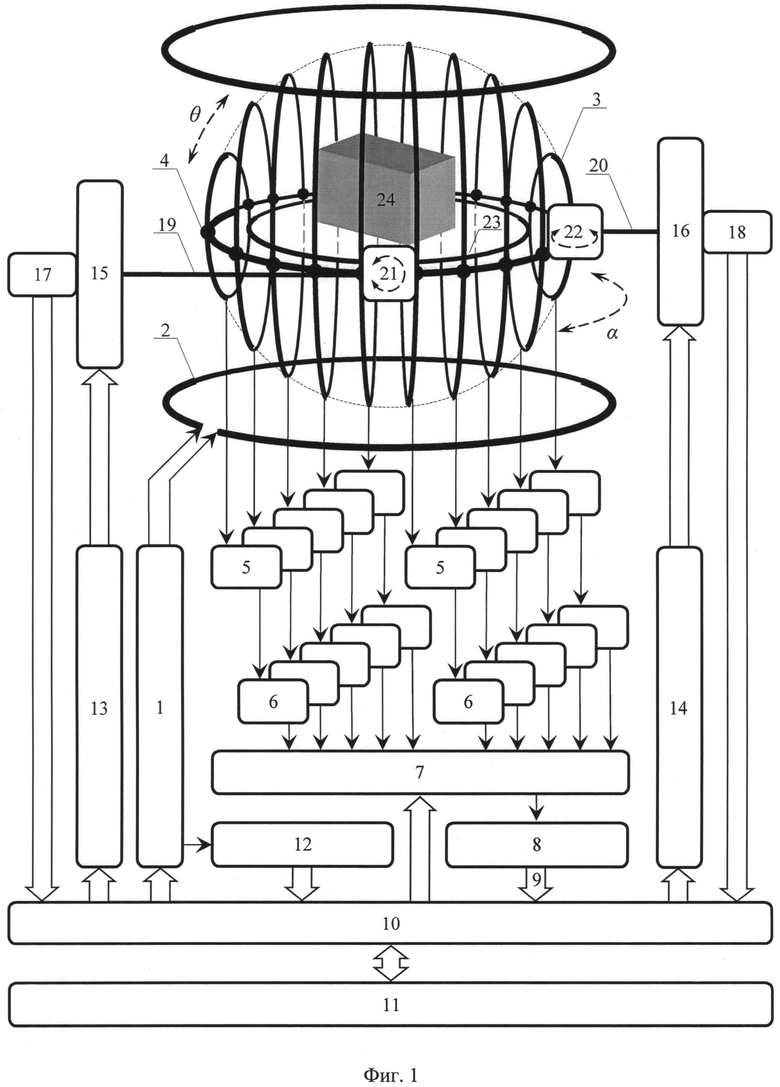
На фиг.1 представлена структурная схема устройства для неразрушающей дифференциальной векторной трехмерной магнитоскопии. Устройство содержит генератор периодического тока 1, источник излучения однородного магнитного поля 2, множество плоских круглых измерительных контуров 3, раздвижной каркас 4, аналоговые интеграторы 5, усилители 6, коммутатор 7, одноканальный аналого-цифровой преобразователь (АЦП) 8, шину данных 9, интерфейс 10, персональную электронно-вычислительную машину (ПЭВМ) 11, формирователь импульса синхронизации 12, драйверы управления 13 и 14 шаговыми двигателями, шаговые двигатели зенитного наклона 15 и азимутального поворота 16, концевые выключатели 17 и 18 шаговых двигателей, передающие винты 19 и 20, наклонный механизм 21, поворотный механизм 22, предметный столик 23, ферромагнитное изделие 24.
Генератор периодического тока 1 подключен к источнику излучения однородного магнитного поля 2, связанному индуктивно с каждым из множества плоских круглых измерительных контуров 3. Измерительные контуры 3 жестко закреплены на раздвижном каркасе 4, при этом выводы этих контуров подключены к входам аналоговых интеграторов 5. Выходы аналоговых интеграторов 5 подключены к входам усилителей 6, выходы которых в свою очередь соединены с сигнальными входами коммутатора 7. Единственный сигнальный выход коммутатора 7 подключен к аналоговому входу одноканального АЦП 8, цифровой выход данных которого шиной данных 9 соединен с цифровым входным портом интерфейса 10, сопряженного с ПЭВМ 11. Кроме того, выход от генератора периодического тока 1 соединен с входом формирователя импульса синхронизации 12, выход которого подключен к цифровому входу синхронизации интерфейса 10.
Цифровой выходной порт управления интерфейса 10 подключен соответственно к генератору периодического тока 1, входу внешнего управления коммутатора 7, а также через драйверы управления 13 и 14 к шаговым двигателям зенитного наклона 15 и азимутального поворота 16. На шаговых двигателях зенитного наклона 15 и азимутального поворота 16 закреплены концевые выключатели 17 и 18 соответственно, выходы которых подключены к цифровому входному порту позиционирования интерфейса 10. Кроме того, шаговые двигатели зенитного наклона 15 и азимутального поворота 16 соединены через передающие винты 19 и 20 соответственно с наклонным механизмом 21 и поворотным механизмом 22, на которых закреплен раздвижной каркас 4. На предметном столике 23 расположено ферромагнитное изделие 24.
Контроль начинается со сканирования, при котором изначально ПЭВМ 11 через цифровой выходной порт управления интерфейса 10 через драйверы управления 13 и 14 шаговыми двигателями зенитного наклона 15 и азимутального поворота 16 соответственно устанавливает раздвижной каркас 4 в положение, соответствующее нулевому значению зенитного и азимутального углов θ и α, о чем свидетельствует сигнал с концевых выключателей 17 и 18, поступающий обратно через цифровой вход порта позиционирования интерфейса 10 на ПЭВМ 11.
Далее ПЭВМ 11 через цифровой выходной порт управления интерфейса 10 сигналами управления выходными параметрами генератора задает частоту, амплитуду и форму выходного тока генератора периодического тока 1. Выходной ток генератора периодического тока 1 непрерывно питает источник излучения однородного магнитного поля 2, создающий в отсутствие ферромагнитного изделия 24 периодическое во времени t однородное распределение плотности В потока Ф в пространстве исследуемого объема. Присутствие исследуемого ферромагнитного изделия 24 перераспределяет магнитное поле в пространстве исследуемого объема в зависимости от структуры ферромагнитного изделия 24, вызывая тем самым неоднородность потока Ф, которая отражается на амплитуде непрерывно индуцируемых во множестве плоских круглых измерительных контуров 3 дифференциальных сигналов:
 ,
,
где 
В свою очередь плоские круглые измерительные контуры 3 реализованы в виде катушек индуктивности, параллельно расположенных относительно друг друга, причем их размеры задаются таким образом, чтобы каждый контур огибал границы сферы, описанной вокруг исследуемого объема. Все контуры жестко крепятся на раздвижном каркасе 4, состоящем из двух разъединяющихся половинок, конструктивно предназначенных для размещения ферромагнитного изделия 24 на предметном столике 23.
Дифференциальные сигналы постоянно интегрируются ∫u(s,t)dt и нормализуются в аналоговых измерительных каналах, состоящих из аналогового интегратора 5 и усилителя 6. Выходной сигнал с каждого измерительного канала устройства поступает на соответствующие сигнальные входы коммутатора 7, для их поочередной передачи на сигнальный выход коммутатора 7. Далее с единственного выхода коммутатора 7 сигнал заводится на вход одноканального АЦП 8 и оцифровывается им.
Работа устройства синхронизируется сигналами синхронизации с выхода формирователя импульса синхронизации 12, поступающими на цифровой вход синхронизации интерфейса 10 с последующей их передачей на ПЭВМ 11. Каждый новый номер опрашиваемого измерительного канала устанавливается на коммутаторе 7 с очередным появлением импульса синхронизации на цифровом входе синхронизации интерфейса 10 благодаря ПЭВМ 11, которая через цифровой выходной порт управления интерфейса 10 выдает сигналы управления на вход внешнего управления коммутатором 7. Кроме того, преобразование АЦП 8 выходного сигнала измерительного канала в цифровой код осуществляется также в моменты времени появления импульса синхронизации. Цифровые коды выходных сигналов измерительных каналов по шине данных 9 поступают в цифровой входной порт интерфейса 10 с последующей их передачей в ПЭВМ 11, чем завершается процедура формирования текущей проекции потоков p(s)=Ф(s)=-∫u(s,t)dt для заданного нулевого зенитного и азимутального углов θ и α.
ПЭВМ 11 через цифровой выходной порт управления интерфейса 10 наклонным механизмом 21, приводимым в движение шаговым двигателем зенитного наклона 15, через передающий винт 19 устанавливает раздвижной каркас 4 в следующее текущее положение, смещенное на Δθ, тем самым совершая зенитный наклон. В результате процесса полного зенитного наклона раздвижной каркас 4 последовательно дискретно наклоняется на зенитные углы, кратные Δθ, до крайнего положения, соответствующего значению зенитного угла θ, равному π, о чем свидетельствует сигнал с концевого выключателя 17, поступающий обратно через цифровой вход порта позиционирования интерфейса 10 на ПЭВМ 11. Каждый зенитный наклон сопровождается процедурой формирования текущей проекции потоков p(s)=Ф(s) для заданного зенитного и азимутального углов θ и α. Полный зенитный наклон для заданного азимутального угла α завершает процедуру формирования зенитных проекций потоков p(s,θ)=Ф(s,θ) для заданного азимутального угла α.
По окончании формирования зенитных проекций потоков для заданного азимутального угла α ПЭВМ 11 через цифровой выходной порт управления интерфейса 10 поворотным механизмом 22, приводимым в движение шаговым двигателем азимутального поворота 16 через передающий винт 20, устанавливает раздвижной каркас 4 в следующее текущее положение, смещенное на Δα, тем самым совершая азимутальный поворот. В результате процесса полного азимутального поворота раздвижной каркас 4 последовательно дискретно поворачивается на азимутальные углы, кратные Δα, до крайнего положения, соответствующего значению азимутального угла α, равному 2π, о чем свидетельствует сигнал с концевого выключателя 18, поступающий обратно через цифровой вход порта позиционирования интерфейса 10 на ПЭВМ 11. Каждый азимутальный поворот сопровождается процедурой формирования зенитных проекций потоков p(s,θ) для заданного азимутального угла α. Полный азимутальный поворот завершает полное сканирование ферромагнитного изделия 24 с формированием зенитных проекций потоков p(s,θ,α)=Ф(s,θ,α)=∫u(s,t)dt для всех азимутальных углов, тем самым предоставляя полный набор исходных проекционных данных для последующей процедуры реконструкции.
Локализация границ раздела сред осуществляется посредством того, что полученный полный набор исходных проекционных данных дифференцируется по выбранному направлению xk:

Данная процедура, схематично изображенная на фиг.2, «скачками» показывает границы изменения распределения плотности магнитного потока, тем самым точно указывая на границы раздела сред внутренней структуры ферромагнитного изделия 24.
При визуализации, позволяющей получить изображение внутренней структуры ферромагнитного изделия, применяется способ неразрушающего объемного измерения векторной функции магнитной индукции неоднородно распределенного в пространстве и периодически изменяющегося во времени магнитного поля, изложенный в [1], который дополнен описанной процедурой дифференцирования по выбранному направлению xk и предполагает использование алгоритма реконструкции к продифференцированным исходным проекционным данным, основанного на принципе обратного преобразования Радона посредством обратной проекции с Фурье-фильтрацией. Фурье-фильтрация осуществляется путем свертки продифференцированных проекций компонент непосредственно в пространстве оригинала Фурье-преобразования с соответствующей реализующей фильтрацию свертывающей функцией h(s), являющейся обратным Фурье-преобразованием F-l[] квадрата частоты K пространственного спектра [6]:
где символ «*» есть оператор свертки; dθ и dα - дифференциал зенитного и азимутального углов соответственно; B′x, B′y, B′z - x, y, z - компоненты продифференцированной векторной функции магнитной индукции 

Таким образом, устройство для неразрушающей дифференциальной векторной трехмерной магнитоскопии позволяет получить изображение внутренней структуры ферромагнитного изделия посредством применения способа неразрушающего объемного измерения векторной функции магнитной индукции неоднородно распределенного в пространстве и периодически изменяющегося во времени магнитного поля, дополненного процедурой дифференцирования исходных проекционных данных по выбранному направлению, благодаря которой реконструированное распределение продифференцированной плотности магнитного потока B′x, B′y, B′z экстремумами указывает на локализацию границ раздела сред.
Литература
1. Патент РФ №2490659, кл. G01R 33/00, опубл. 20.08.2013.
2. Патент РФ №2186382, кл. G01N 27/00, опубл. 27.07.2002.
3. Патент РФ №2191374, кл. G01N 27/00, опубл. 20.10.2002.
4. Патент РФ №2245542, кл. G01N 27/83, опубл. 27.01.2005.
5. Патент РФ №2174235, кл. G01R 33/02, опубл. 27.09.2001.
6. J. Radon. Über die Bestimmung von Funktionen durch ihre Integralwerte längs gewisser Mannigfaltigkeiten // Berichte Sächsische Akademie der Wissenschaften, Bande 29, s.262-277, Leipzig, 1917.
Изобретение относится к информационно-измерительной технике, представляет собой устройство для измерения магнитных полей и может быть использовано для неразрушающего контроля внутренней структуры ферромагнитных объектов. Устройство содержит множество плоских круглых измерительных контуров, жестко закрепленных на раздвижном каркасе, систему позиционирования, генератор периодического тока и подключенный к нему источник излучения однородного магнитного поля, формирователь импульса синхронизации, схему дифференцирования и реконструкции. Измерительные контуры индуктивно связаны с источником однородного магнитного поля и реализованы в виде катушек индуктивности, параллельно расположенных относительно друг друга, причем их размеры задаются таким образом, чтобы каждый измерительный контур огибал границы сферы, описанной вокруг исследуемого объема. Система позиционирования состоит из двух шаговых двигателей: зенитного и азимутального наклонов. Техническим результатом является получение изображения внутренней структуры ферромагнитного изделия на основе реконструированного распределения продифференцированной плотности магнитного потока, где экстремумы B′x, B′y, B′z указывают на локализацию границ раздела сред. 2 ил.
Устройство для неразрушающей дифференциальной векторной трехмерной магнитоскопии, содержащее формирователь импульса синхронизации, шину данных, аналого-цифровой преобразователь, персональную электронно-вычислительную машину, соединенную с выходами интерфейса, систему позиционирования, состоящую из двух шаговых двигателей, подключенных к блокам управления, подсоединенный к первому шаговому двигателю передающий винт, соединенный с поворотным механизмом, блоки концевых выключателей, закрепленных на двигателях, отличающееся тем, что в него введены генератор периодического тока, источник излучения однородного магнитного поля, индуктивно связанные с ним множество плоских круглых измерительных контуров, жестко закрепленных на раздвижном каркасе и реализованных в виде катушек индуктивности, параллельно расположенных относительно друг друга, причем их размеры задаются таким образом, чтобы каждый измерительный контур огибал границы сферы, описанной вокруг исследуемого объема, при этом выводы этих контуров подключены к входам аналоговых интеграторов, выходы которых через усилители соединены с соответствующими сигнальными входами коммутатора, причем единственный сигнальный выход коммутатора подключен к аналоговому входу одноканального аналого-цифрового преобразователя, а механизм позиционирования дополнен передающим винтом и наклонным механизмом, выполненным так, чтобы обеспечивать поочередные последовательные дискретные поступательные зенитные наклоны и азимутальные повороты с заданными шагами раздвижного каркаса относительно предметного столика с размещенным на нем ферромагнитным изделием, сопровождающиеся процедурой формирования текущей проекции потоков для заданных зенитных и азимутальных углов, причем персональная электронно-вычислительная машина посредством интерфейса выдает сигналы управления коммутатором и позиционированием раздвижного каркаса и обеспечивает управление частотой, амплитудой и формой выходного тока генератора периодического тока, а также реализует обработку каждой текущей проекции потоков продифференцированной по выбранному направлению с последующей визуализацией результатов процесса неразрушающего контроля внутренней структуры ферромагнитного изделия, позволяющей выявлять локализацию границ раздела сред посредством определения экстремумов реконструируемого распределения продифференцированной плотности магнитного потока.
| Жильников А.А., Жильников Т.А | |||
| Способ неразрушающей дифференциальной векторной трёхмерной магнитоскопии внутренней структуры ферромагнитных объектов и реализующая его система | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

