Изобретение относится к горнорудной промышленности и может быть использовано при бесконтактном скважном индукционном контроле состояния массивов горных пород и их технологических параметров при ведении горных работ, в частности при контроле трещиноватости, влажности, минерального состава, напряженного состояния массивов.
Известен бесконтактный индукционный способ электроразведки высокопроводящих залежей, включающий генерирование в исследуемом массиве горных пород переменного поля частотой 40-150 кГц с помощью генератора и генераторной катушки, помещаемой в контрольной скважине, измерение вторичного магнитного поля вихревых токов, возникающих в проводящей среде с помощью приемной катушки. По измеренной величине, наводимой в приемной катушке э.д.с поля вихревых токов, судят об удельном электросопротивлении пород, а по аномальным значениям удельного электросопротивления определяют расположение и размеры залежей природных проводников (см. Плюснин М.И. Индукционный каротаж. - М.: Недра, 1973. -142 с.).
Данный способ обеспечивает более высокую точность контроля по сравнению с контактными способами, поскольку результаты измерений не зависят от состояния контакта между поверхностями электрода и исследуемого массива. Связь массива с датчиком осуществляется электромагнитным полем, поэтому влияние контактных электрохимических, окислительных и трибоэлектрических явлений в данном случае полностью устраняется. Кроме того, применение специальных компенсирующих и фокусирующих катушек позволяет значительно снизить чувствительность датчика вблизи оси скважины.
Недостатком способа является недостаточный уровень измеряемого сигнала в диапазоне изменения удельного электросопротивления пород до 200 Ом•м. Величина полезного сигнала для немагнитных пород определяется выражением
где f - рабочая частота; SГ, SП - площади поперечного тока сечения соответственно генераторной и приемной катушек; nГ, nП - число витков соответственно генераторной и приемной катушек; I - действующее значение тока генераторной катушки; В - расстояние между катушками (база зонда); F(B, ρ , f) - функционал, зависящий от вида измеряемой составляющей полезного сигнала (полного сигнала, активной или реактивной составляющей); ρ - эффективное удельное электросопротивление пород в зоне контроля; K - конструктивная постоянная, зависящая от точности компенсации прямого сигнала в непроводящей среде.
Анализ (1) показывает следующие возможности повышения величины полезного сигнала E:
- повышение частоты f приводит к уменьшению глубины зондирования, поэтому максимальное значение f ограничивается частотой 150 кГц, что соответствует эффективной глубине контроля δ = 1 м при ρ > 1 Ом•м;
- SГ, SП ограничены диаметром контрольной скважины, который обычно не превышает 60 мм;
- увеличение nГ, nП ограничено значениями предельных индуктивностей для искробезопасных цепей; кроме того, увеличение nГ приводит к уменьшению тока I;
- уменьшение базы зонда В ограничено техническими возможностями компенсации прямого сигнала, когда резко уменьшается величина К,
- оптимальный диапазон В составляет от 0,5 до 1 м, при котором точность компенсации не менее 0,1%;
- функционал F(B, ρ, f) имеет наиболее выгодный вид при измерении активной составляющей сигнала;
- величина тока I ограничивается напряжением и мощностью источника питания Uп, из условий искробезопасности Uп < 20 В, а потребляемая мощность устройства должна быть такой, чтобы обеспечивался непрерывный контроль в течение не менее 5 часов.
Реализация всех рассмотренных факторов реально способна обеспечить контроль состояния пород с величиной ρ менее 5-10 Ом•м. Этот диапазон соответствует рудам, другим природным проводникам и породам, насыщенным концентрированными минерализованными растворами. При естественной влажности величина большинства вмещающих пород угольных и рудных месторождений достигает 200 Ом•м, что требует повышения уровня полезного сигнала индукционного каротажа не менее чем на порядок.
Принципиально требуемое повышение уровня измеряемого сигнала при индукционном способе контроля обеспечивается применением резонанса в цепях генераторной и приемной катушек (см. Хямяляйнен В.А., Простов С.М., Сыркин П.С. Геоэлектрический контроль разрушения и инъекционного упрочнения горных пород. - М.: Недра, 1996,- 288 с., датчик ДИ-1). По данному способу при генерировании в массиве переменного магнитного поля генераторную катушку подключают через емкость, обеспечивая тем самым режим последовательного резонанса. При настройке контура изменением рабочей частоты или емкости добиваются режима, близкого к резонансному, при котором величина тока I может возрасти на 1-2 порядка, что согласно (1) обеспечивает повышение уровня э.д.с. вторичного магнитного поля вихревых токов во столько же раз. По характеру изменения измеренной величины в пространстве и во времени оценивают состояние массива горных пород. Принимаем данный способ за прототип.
Недостатком этого способа является его низкая точность, обусловленная влиянием проводящего массива на режим резонанса генераторной катушки.
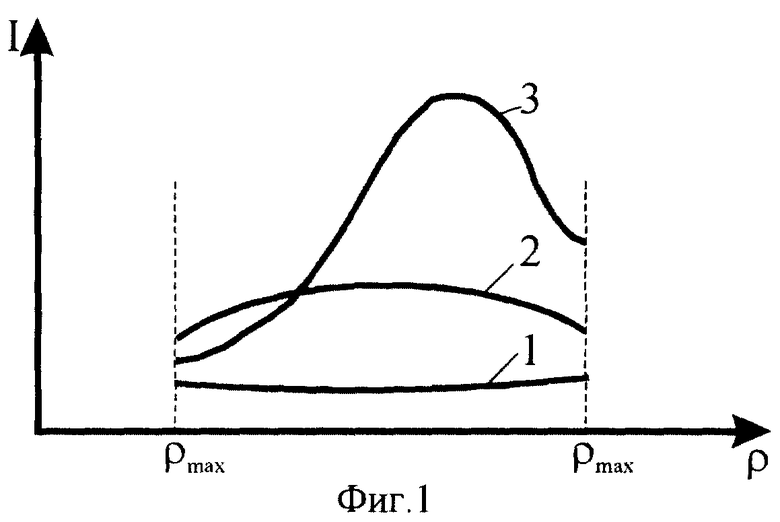
Характер изменения действующего значения тока I в зависимости от удельного электросопротивления массива ρ по способу-прототипу поясняется фиг. 1, где график 1 соответствует нерезонансному режиму работы генераторной катушки, 2 - резонансному режиму с низкой добротностью контура, 3 - резонансному режиму с высокой добротностью контура. При помещении генераторной катушки в проводящую среду происходит изменение ее индуктивности и емкости, что приводит к смещению рабочей точки на графике I (ρ). При этом изменение I носит немонотонный характер: с уменьшением ρ ток I возрастает до максимального значения в точке резонанса, а затем убывает. С учетом вида функции I (ρ) в режиме 3 расчетная зависимость (1) приобретает дополнительную нелинейность и неоднозначность, т.к. одинаковые значения I возможны при различных значениях ρ. Это снижает точность контроля состояния массива данным способом и вынуждает для ослабления описанного эффекта уменьшить уровень I путем снижения добротности контура (график 2). Данный путь приводит к неполному использованию достоинств прототипа, т.к. ведет к снижению чувствительности. В предельном случае I ≈ const, и преимущества прототипа сводятся к минимуму.
Задачей изобретения является повышение точности контроля состояния массива горных пород индукционным способом за счет целенаправленного использования влияния изменения электропроводности породного массива на режим резонанса контура генераторной катушки.
Решение указанной задачи достигается тем, что в известном способе, включающем генерирование в породном массиве переменного магнитного поля в диапазоне 40-150 кГц с использованием резонанса в цепи генераторной катушки, измерение э.д.с. вторичного магнитного поля вихревых токов и оценку состояния массива по характеру изменения измеренной величины в пространстве и во времени, дополнительно измеряют индуктивность генераторной катушки в рабочем диапазоне изменения удельного электросопротивления массива, а величину емкости в последовательном резонансном контуре определяют по максимальному значению индуктивности, при этом применяют способ намотки генераторной катушки, при котором изменение ее тока монотонно во всем рабочем диапазоне.
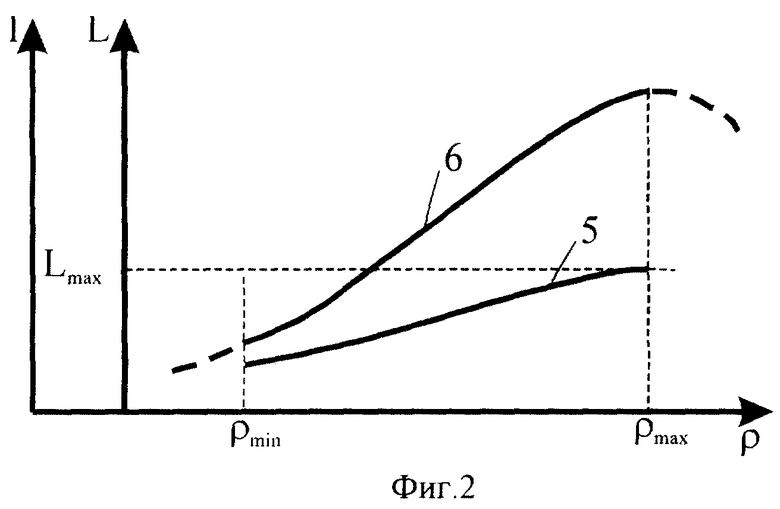
Сущность предлагаемого способа поясняется фиг. 2, на которой представлены зависимости индуктивности L 5 и тока I 6 генераторной катушки в диапазоне изменения удельного электросопротивления массива от ρmax до ρmin.
Осуществляют способ следующим образом. Все основные параметры индукционного зонда определяют известным путем, реализуя изложенные выше при анализе расчетной зависимости (1) факторы повышения чувствительности способа. Генераторную катушку подключают, используя резонансный контур. Дополнительно измеряют индуктивность L генераторной катушки в рабочем диапазоне изменения удельного электросопротивления массива ρ. Для этого используют физические модели массива горных пород: замкнутые проводящие кольца соответствующего диаметра и сечения, разомкнутые кольца с включением в разрыв переменного сопротивления или объем, заполненный раствором электролита (см. Плюснин М.И. Индукционный каротаж. - М.: Недра, 1973. - 142 с.).
На полученном графике L (ρ) определяют максимальное значение Lmax. Величину резонансной емкости определяют из выражения
После подключения резонансной емкости C измеряют действующее значение тока генераторной катушки I, применяя ранее использованную модель массива. Зависимость I (ρ) должна быть монотонной, т.е. величина I должна непрерывно уменьшаться от I(ρmax) до I(ρmin) без локальных экстремумов. При обнаружении подобных экстремумов применяют специальные способы намотки (секционная, "внавал" и т. п. ), обеспечивающие уменьшение собственной емкости катушки. Затем операцию установления генераторной катушки повторяют.
Установленный таким образом резонансный режим работы генераторной катушки обеспечивает повышение точности контроля состояния массива горных пород при сохранении требуемой чувствительности. При максимальном удельном электросопротивлении массива вторичное магнитное поле вихревых токов в массиве минимально, однако величина I генераторной катушки в этом случае максимальна, что согласно (1) обеспечивает максимальную величину полезного сигнала E, т.е. чувствительность способа к изменениям ρ на 1-2 порядка превышает чувствительность описанного аналога. При уменьшении ρ величина I изменяется монотонно, что обеспечивает близкую к линейной тарировочную зависимость E (ρ) во всем рабочем диапазоне измерений. Измеряя величину E в различных точках массива и сопоставляя измеренные величины с опорными, соответствующими, например, ненарушенным участкам с естественной влажностью вне зоны опорного давления, судят о расположении и размерах нарушенных зон, размерах зон опорного давления и концентрации напряжений вокруг выработки, степени пустотности и влажности пород. По сравнению с известными способами предложенный способ обеспечивает более высокую точность контроля состояния массива.
Пример исполнения. Генераторная катушка опытного образца датчика индукционного каротажа содержит 1000 витков провода диаметром 0,27 мм, имеет активное сопротивление 40 Ом.
Для оценки влияния проводящей среды на изменение индуктивности катушки применяли разомкнутое проводящее кольцо с радиусом, равным глубине максимальной чувствительности датчика, составляющей 0,2 м. В разрыв кольца было включено переменное сопротивление. Величину моделируемого удельного электросопротивления породного массива определяли по формуле, Ом•м:
где Zк - величина сопротивления в разрыве кольца, Ом; ΔX - размер зоны осевой чувствительности датчика, м.
Величина ΔX на основе лабораторных испытаний определялась из выражения
ΔХ=3В
Зависимость индуктивности L катушки от ρМ приведена в табл. 1.
Величину резонансной емкости для Lmax = 20,2•10-3 Гн и частоты f = 45•103 Гц определим по формуле (2)
Катушка намотана в виде 10 секций, что позволило снизить ее паразитную емкость и устранить дополнительные электромагнитные связи. Зависимость тока I секционированной катушки с использованием резонансного контура от ρМ приведена в табл. 2.
Таким образом, максимальное значение I и наибольшая чувствительность измерений соответствует ρmax = 200 Ом•м, в диапазоне от 2 до 200 Ом•м величина I изменяется монотонно, без локальных экстремумов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КРЕПЛЕНИЯ ВЫРАБОТКИ | 1994 |
|
RU2065055C1 |
| СПОСОБ ЭЛЕКТРОХИМИЧЕСКОГО УКРЕПЛЕНИЯ ГОРНЫХ ПОРОД | 2000 |
|
RU2175040C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ ДЕФОРМАЦИЙ | 2010 |
|
RU2425975C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ УДЕЛЬНОЙ ЭЛЕКТРОПРОВОДНОСТИ ПЛОСКИХ ИЗДЕЛИЙ | 1996 |
|
RU2121152C1 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА ЦЕМЕНТАЦИОННОГО УПРОЧНЕНИЯ МАССИВА ГОРНЫХ ПОРОД | 1992 |
|
RU2039256C1 |
| СПОСОБ ЭЛЕКТРОХИМИЧЕСКОГО УКРЕПЛЕНИЯ ГОРНЫХ ПОРОД | 2005 |
|
RU2299294C2 |
| СПОСОБ ИНДУКЦИОННОГО КАРОТАЖА ИЗ ОБСАЖЕННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614853C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СТРУКТУРНОГО ОСЛАБЛЕНИЯ МАССИВА ПОРОД | 1998 |
|
RU2194969C2 |
| СПОСОБ ИМПУЛЬСНОГО ИНДУКЦИОННОГО КАРОТАЖА ИЗ ОБСАЖЕННЫХ СКВАЖИН | 2017 |
|
RU2668650C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОГО ОПРОБОВАНИЯ МАГНЕТИТОВЫХ РУД | 2016 |
|
RU2632265C2 |


Изобретение относится к горнорудной промышленности и может быть использовано при бесконтактном скважинном индукционном контроле состояния массивов горных пород и их технологических параметров при ведении горных работ, в частности при контроле трещиноватости, влажности, минерального состава, напряженного состояния массивов. Способ позволяет повысить точность контроля за счет более высокого уровня измеряемого сигнала в диапазоне удельного электросопротивления пород до 200 Ом•м. Измеряют индуктивность генераторной катушки в рабочем диапазоне изменения удельного электросопротивления массива. Величину емкости, через которую катушку подключают к генератору для образования последовательного резонансного контура, определяют по максимальному значению индуктивности. Применяют способ намотки генераторной катушки, при котором изменение ее тока монотонно во всем рабочем диапазоне. Измеряют величину э.д.с. вторичного магнитного поля вихревых токов. Сопоставляя измеренные значения с опорными, судят о расположении, размерах аномальных зон и технологических параметрах массива горных пород. 2 табл., 2 ил.
Способ контроля состояния массива горных пород, включающий генерирование в массиве переменного магнитного поля с использованием резонанса в цепи генераторной катушки, измерение э.д.с. вторичного магнитного поля вихревых токов и оценку состояния массива по характеру изменения измеренной величины в пространстве и во времени, отличающийся тем, что дополнительно измеряют индуктивность генераторной катушки в рабочем диапазоне изменения удельного электросопротивления массива, а величину емкости в последовательном резонансном контуре определяют по максимальному значению индуктивности, при этом применяют способ намотки генераторной катушки, при котором изменение ее тока монотонно во всем рабочем диапазоне.
| ХЯМЯЛЯЙНЕН В.А | |||
| И ДР | |||
| Геоэлектрический контроль разрушения и инъекционного упрочнения горных пород | |||
| - М.: Недра, 1996, с.80-89 | |||
| Устройство для измерения деформаций массива горных пород | 1984 |
|
SU1176075A1 |
| Устройство для определения трещиноватости горных пород | 1987 |
|
SU1448047A1 |
| Устройство для определения трещиноватости горных пород | 1985 |
|
SU1366639A2 |
| SU 1168710 A, 23.07.1987 | |||
| Способ прогнозирования аварийного состояния участков массива горных пород | 1990 |
|
SU1739024A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ, ВОЗНИКАЮЩЕГО ПРИ ТРЕЩИНООБРАЗОВАНИИ ГОРНЫХ ПОРОД | 1994 |
|
RU2085736C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ СТЕНОК СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2023157C1 |
| СПОСОБ СОГЛАСОВАНИЯ ВХОДНЫХ СОПРОТИВЛЕНИЙ АНТЕННЫ И МАССИВА ГОРНЫХ ПОРОД | 1992 |
|
RU2067308C1 |
| US 5175500 A, 29.12.1992 | |||
| US 3510757 A, 05.05.1970 | |||
| СПОСОБ МАРКИРОВКИ ОБЪЕКТОВ | 1999 |
|
RU2165359C1 |
