Устройство для оперативного опробования магнетитовых руд
Изобретение относится к области неразрушающего контроля и может быть использовано для измерения магнитной восприимчивости магнетитовых руд при оперативном опробовании стенок горных выработок, а также для оценки качества рудной массы в навалах, вагонетках и на самосвалах.
Известен рудничный измеритель магнитного влияния среды РИМВ-3, предназначенный для геофизических исследований и оценки качества магнетитовых руд при измерениях в скважинах, на стенках горных выработок, рудной массы в навалах, вагонетках и самосвалах, а также при исследовании порошковых проб (см. Каталог геофизической аппаратуры. - М.: Недра, 2005. Перечень геофизической аппаратуры, выпускаемой ГНПП «Геологоразведка». Наземная аппаратура для магнитных исследований). Прибор РИМВ-3 возбуждает электромагнитное поле и измеряет его напряженность с помощью индукционного преобразователя, генераторная катушка которого подключена к источнику низкочастотного напряжения, а измерительная катушка - к вторичному электронному преобразователю. Работа данного прибора основана на возбуждении электромагнитного поля в объеме исследуемого пространства и измерении относительного изменения магнитной составляющей напряженности этого поля в зависимости от изменения магнитных свойств исследуемой среды. Под воздействием электромагнитного поля в измерительной катушке наводится ЭДС, значение которой максимально при расположении индукционного преобразователя (зонда) в немагнитной среде (в воздухе) и понижается при увеличении магнитной восприимчивости горной породы или руды. Приращение ЭДС измерительной катушки зонда зависит от количественного содержания магнитного компонента в контролируемой среде. Для опробования в навалах горной массы и на самосвалах с железорудной породой используется индукционный зонд с соосно расположенными генераторной и приемной катушками, которые удалены друг от друга на расстояние около 0,5 м.
Недостатком прибора РИМВ-3 является невысокая точность и низкая чувствительность измерений, обусловленная зависимостью его показаний от неровностей поверхности и расстояния до исследуемой среды.
Наиболее близким техническим решением к заявляемому изобретению является устройство для опробования магнетитовых руд. В составе данного устройства применяется зонд, содержащий генераторную, приемную и две компенсационные катушки, размещенные на разных расстояниях от генераторной катушки. Оси всех катушек параллельны друг другу и расположены в одной плоскости перпендикулярно поверхности исследуемой среды. В устройстве также применяются генератор синусоидального напряжения, подключенный к генераторной катушке, два усилительно-преобразовательных блока, блок выделения наибольшего сигнала и регистратор. Приемная катушка зонда подключена между общей шиной и объединенными выводами двух компенсационных катушек, свободные выводы которых соединены соответственно с входами двух усилительно-преобразовательных блоков, а выходы этих блоков подключены к первому и второму входам блока выделения большего сигнала, выход которого соединен с регистратором, фиксирующим результаты контроля (см. патент №2006888, МПК G01V 3/165, G01V 3/18, опубл. 1994 г. ).
Недостатками данного устройства является невысокая чувствительность, обусловленная слабым изменением амплитуды сигналов на приемной и компенсационных обмотках при изменении магнитной восприимчивости исследуемой среды, а также ограниченный диапазон допустимых отклонений ±Δh зонда от оптимального расстояния hопт до поверхности исследуемой среды.
В частности, при подаче синусоидального напряжения с частотой 1 кГц и амплитудой 50 В на генераторную катушку значение ЭДС на приемной и компенсационных катушках в воздушной среде составляет не более 20,5 мВ, т.е. примерно в 2400 раз меньше при одинаковом числе витков в генераторной и приемной катушках. При этом диапазон измеряемого напряжения не превышает нескольких милливольт, что практически ограничивает точность контроля магнитной восприимчивости из-за влияния инструментальных погрешностей прибора и воздействия внешних помех. Кроме того, на точность измерения влияет методическая погрешность, обусловленная волнообразной зависимостью чувствительности прибора от расстояния между зондом и исследуемой средой. В частности, при использовании зонда длиной lгп=100 см и погрешности от неровной поверхности среды и изменения высоты h между зондом и исследуемой средой в ±5% необходимо выдерживать оптимальное расстояние от зонда до поверхности среды hопт=77 см с допустимым отклонением Δh не более ±25 см.
Задачей изобретения является создание устройства для оперативного опробования магнетитовых руд, позволяющего повысить чувствительность и точность устройства измерения магнитной восприимчивости при бесконтактном оперативном опробовании магнетитовых руд с увеличением допустимого диапазона расстояний от зонда до поверхности исследуемой среды.
Поставленная задача решается тем, что в устройство для оперативного опробования магнетитовых руд, содержащее генератор синусоидального напряжения, подключенный к генераторной катушке, приемную катушку, установленную между общей шиной и объединенными выводами двух компенсационных катушек, размещенных между генераторной и приемной катушками в одной плоскости перпендикулярно поверхности исследуемой среды, вторые выводы компенсационных катушек подключены к входам первого и второго усилительно-преобразовательных блоков, содержащие последовательно соединенные усилитель переменного напряжения, синхронный детектор и усилитель постоянного тока, и регистратор для вывода результатов контроля, дополнительно введены три конденсатора, подключенные соответственно параллельно приемной и двум компенсационным катушкам, ультразвуковой датчик и вычислительный блок. Выходы первого и второго усилительно-преобразовательных блоков подключены к первому и второму входам вычислительного блока, третий вход которого соединен с выходом ультразвукового датчика, а выход вычислительного блока подключен к регистратору.
Технический результат заключается в повышении чувствительности и точности устройства для оперативного опробования магнетитовых руд при бесконтактном измерении магнитной восприимчивости с увеличением допустимого диапазона расстояний от зонда до поверхности исследуемой среды.
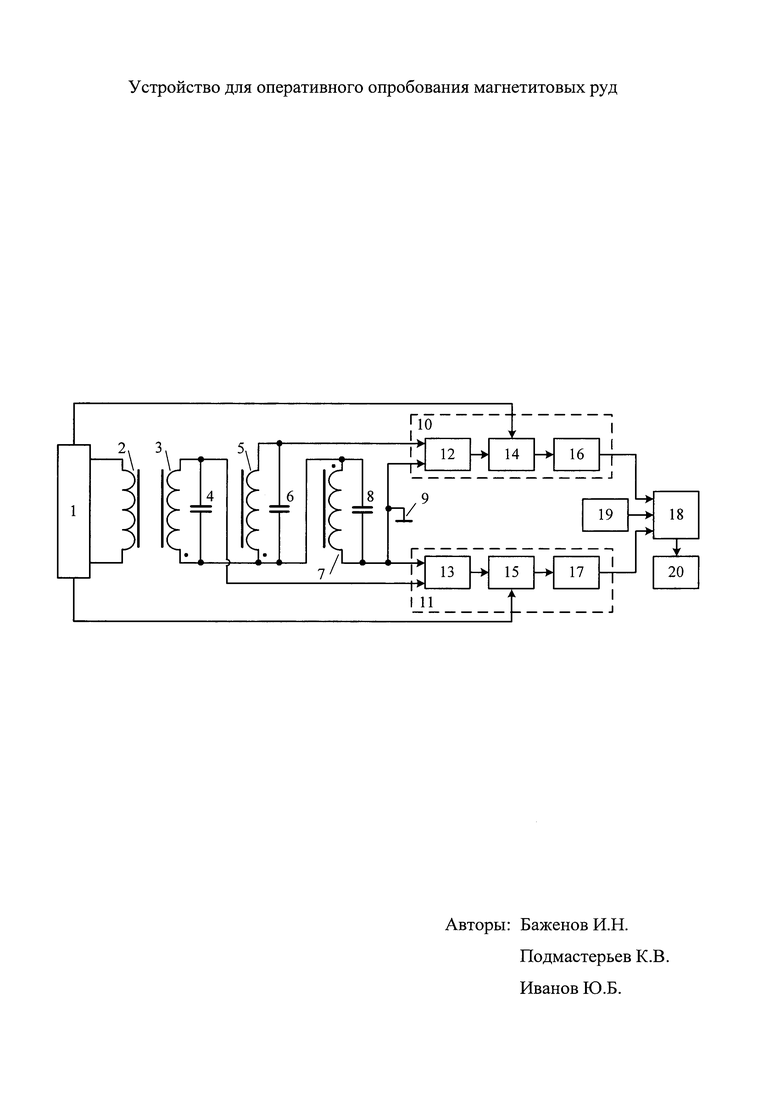
Структурная схема предлагаемого устройства приведена на чертеже.
Устройство для оперативного опробования магнетитовых руд содержит генератор 1 синусоидального напряжения, к которому подключена генераторная катушка 2, первую компенсационную катушку 3 с первым конденсатором 4, вторую компенсационную катушку 5 со вторым конденсатором 6 и приемную катушку 7 с третьим конденсатором 8. Конструктивно все катушки размещены в зонде (на рисунке не показан) на разных расстояниях от генераторной катушки параллельно друг другу в одной плоскости перпендикулярно поверхности исследуемой среды. Один вывод обмотки приемной катушки 7 соединен с общей шиной 9, а другой подключен к объединенным первым выводам первой компенсационной катушки 3 и второй компенсационной катушки 5, которые включены встречно. Первый 10 и второй 11 усилительно-преобразовательные блоки выполнены по однотипной схеме и содержат усилители переменного напряжения 12 и 13, синхронные детекторы 14 и 15 и усилители постоянного тока 16 и 17. Управляющие входы синхронных детекторов 14 и 15 подключены к генератору 1. Вторые выводы компенсационных катушек 3 и 5 подключены соответственно к входам усилителей переменного напряжения 13 и 12, выходы которых через синхронные детекторы 14 и 15 и усилители постоянного тока 16 и 17 соединены с первым и вторым входами вычислительного блока 18. Ультразвуковой датчик 19 подключен к третьему входу вычислительного блока 18, выход которого подключен к регистратору 20, который применен для вывода результатов контроля магнитной восприимчивости исследуемой среды.
Устройство для оперативного опробования магнетитовых руд работает следующим образом.
При протекании переменного тока от генератора 1 синусоидального напряжения по виткам генераторной катушки 2 в окружающем пространстве создается переменное электромагнитное поле. Конструктивно приемная катушка 7 устанавливается в зонде на фиксированном расстоянии lгп от генераторной катушки 2. Первая компенсационная катушка 3 размещается на расстоянии 0,2lгп, а вторая компенсационная катушка 5 - на расстоянии 0,8lгп от генераторной катушки 2. В воздухе при отсутствии магнитной среды это электромагнитное поле индуцирует на двух встречно включенных компенсационных катушках 3 и 5 равные по амплитуде и противоположные по фазе ЭДС Ε1 и Е2.
При размещении зонда с генераторной 2, двумя компенсационными 3 и 5 и приемной 7 катушками над исследуемой средой происходит ее намагничивание переменным электромагнитным полем генераторной катушки 2. Появляющееся вторичное магнитное поле индуцирует в приемной 7 и в компенсационных 3 и 5 катушках разные по амплитуде ЭДС. В результате этого на входе усилителя 13 появляется разностная ЭДС ΔΕ1 выходных сигналов приемной 7 и первой компенсационной 3 катушек, а на входе усилителя 12 - разностная ЭДС ΔE2 выходных сигналов приемной 7 и второй компенсационной 5 катушек. После усиления этих разностных ЭДС ΔЕ1 и ΔЕ2 усилителями 13, 12 и их выпрямления синхронными детекторами 15 и 14 постоянные или медленно меняющиеся сигналы усиливаются усилителями 17 и 16 и поступают на первые два входа вычислительного блока 18 на основе микроконтроллера, содержащего коммутатор входных сигналов и аналого-цифровой преобразователь для получения и обработки результатов контроля в цифровой форме (на рисунке не показан). На третий вход вычислительного блока 18 поступают импульсы от ультразвукового датчика 19, определяющего расстояние h от зонда до исследуемой среды для коррекции результатов преобразования, которые выводятся на регистратор 20. По величине фиксируемого в цифровой форме результата определяется магнитная восприимчивость среды.
Работа устройства основана на следующих теоретических положениях (см. патент №2006888, МПК G01V 3/165, G01V 3/18, опубл. 1994 г. ).
При размещении зонда над плоской поверхностью исследуемой среды разностные ЭДС ΔЕ1=E0G1χмс и ΔЕ2=E0G2χмс зависят от произведения наводимой в воздухе ЭДС Е0, геометрических факторов зонда G1, G2n магнитной восприимчивости среды χмс=Ι/Η, пропорциональной ее намагниченности I от напряженности Η электромагнитного поля. Значения геометрических факторов зонда G1, G2 зависят от расположения компенсационных катушек относительно генераторной катушки и изменяются в широком диапазоне в зависимости от отношения расстояния до исследуемой среды и длины зонда h/lгп.
Разностные ЭДС ΔЕ1, ΔЕ2 усиливаются и детектируются усилительно-преобразовательными блоками 11, 10 с коэффициентами преобразования K11, K10, поэтому напряжения на двух входах вычислительного блока 18 составляют

где для получения одинаковых максимальных значений этих напряжений ΔU1макс=ΔU2 макс необходимо выполнение условия K11G1макс=К10G2макс, которое при использовании усилительно-преобразовательных блоков 11 и 10 с равными коэффициентами преобразования К11=К10 сводится к обеспечению одинаковых максимальных значений геометрических факторов зонда G1макс=G2макс. Выполнение такого равенства можно обеспечить уменьшением в 4 раза количества витков в первой компенсационной катушке 3 по сравнению с числом витков во второй компенсационной катушке 5 (при их размещении на расстояниях 0,2lгп и 0,8lгп от генераторной катушки).
Ультразвуковой датчик 19 определяет h расстояние от зонда до исследуемой среды и подает импульсы разной длительности на третий вход вычислительного блока 18, который автоматически изменяет коэффициент преобразования сигналов ΔU1K и ΔU2K, поступающих от усилителей 17 и 16, выполняет их сравнение и выделяет наибольший из них, по величине которого вычисляется магнитная восприимчивость исследуемой среды для ее вывода на регистратор 20.
В предлагаемой схеме устройства первая компенсационная катушка 3 с конденсатором 4, вторая компенсационная катушка 5 с конденсатором 6 и приемная катушка 7 с конденсатором 8 образуют три параллельных колебательных контура. Для повышения чувствительности резонансная частота fP этих контуров с учетом индуктивностей L3, L5, L7 катушек 3, 5, 7 и емкостей C4, C6, C8 конденсаторов 4, 6 и 8 должна задаться равной частоте генератора 1 синусоидального напряжения по условию (см. Изюмов Н.М., Линде Д.П. Основы радиотехники. - М.: Радио и связь, 1983. - 376 с.):

где L3 - индуктивность первой компенсационной катушки (Гн);
С4 - емкость первого конденсатора (Ф);
L5 - индуктивность второй компенсационной катушки (Гн);
С6 - емкость второго конденсатора (Ф);
L7 - индуктивность приемной катушки (Гн);
С8 - емкость третьего конденсатора (Ф).
Сопротивление таких колебательных контуров на резонансной частоте в десятки раз превышает индуктивное сопротивление двух компенсационных и приемной катушек, что позволяет значительно повысить амплитуду сигналов на этих контурах при изменении магнитной восприимчивости среды и уменьшить инструментальную погрешность преобразования.
Увеличение амплитуды сигналов на двух компенсационных и приемном контурах также позволяет использовать усилители 12 и 13 с небольшими коэффициентами усиления и формировать на входах синхронных детекторов 14 и 15 напряжения в единицы вольт. Этим уменьшается влияние инструментальных погрешностей синхронных детекторов 14, 15 и температурного дрейфа усилителей постоянного тока 16 и 17 на точность преобразования.
Практически за счет повышения амплитуды сигналов на выходах компенсационных и приемного колебательных контуров дополнительно ослабляется относительное влияние внешних наводок и помех и уменьшается случайная погрешность преобразования при сравнительно небольшом усложнении схемы устройства.
Для оценки эффективности предложенного технического решения было проведено моделирование устройства на ПЭВМ в программе Electronics Workbench Pro, в результате которого установлено следующее:
1) при подаче на генераторную катушку синусоидального напряжения с амплитудой U1=10 В и частотой ƒ1=1 кГц изменение индуктивности одной из компенсационных катушек на 10% относительно начального значения Lнач=0,1 Гн приводит к появлению разностного напряжения ΔU1≈2,28 мВ;
2) при подключении конденсаторов с одинаковой емкостью С=200 нФ параллельно компенсационным катушкам изменение индуктивности одной из них на ±10% изменяет разностное напряжение на ΔU1K≈80 мВ на частоте резонанса контуров ƒp=1 кГц при входных сопротивлениях усилителей переменного тока 12 и 13, составляющих 10 кОм, т.е. амплитуда измеряемого сигнала увеличивается примерно в К=ΔU1K/ΔU1=80,2/2,28≈35 раз.
Следовательно, применение резонансного режима работы приемного и компенсационных контуров позволяет практически в десятки раз повысить чувствительность устройства к изменению электромагнитного поля и дает возможность, например, увеличить более чем в 30 раз чувствительность устройства.
Процесс калибровки устройства выполняется в следующем порядке.
Зонд с размещенными на нем генераторной, двумя компенсационными и приемной катушками размещается горизонтально на минимальном расстоянии над металлическим листом большого размера, например 2×1,2 м. Затем зонд постепенно поднимается на максимальное расстояние от этого листа. В процессе его подъема дискретно через каждый 1 см выполняется измерение расстояния до листа ультразвуковым датчиком 19, который формирует импульсы, длительность которых прямо пропорциональна расстоянию до металлического листа. Ширина каждого импульса, поступающего от ультразвукового датчика 19, измеряется в цифровой форме микроконтроллером вычислительного блока 18. Полученный цифровой код Ντ используется как адрес ячейки оперативного запоминающего устройства, входящего в состав микроконтроллера. При этом аналого-цифровым преобразователем также кодируются выходные напряжения ΔU1K и ΔU2K усилительно-преобразовательных блоков 11 и 10, сравнение полученных кодов ΔΝ1 и ΔN2 и запись наибольшего из них по адресу ΝT, определяемому длительностью выходного импульса ультразвукового датчика 19.
После завершения процесса подъема зонда от минимального до максимального расстояния от металлического листа выполняется линеаризация характеристики прибора. При этом микроконтроллер вычислительного блока 18 определяет максимальное значение кода ΔNmax, соответствующее оптимальному расстоянию hom до металлического листа, которое принимается за образцовую величину, относительно которой должны корректироваться показания устройства. Затем вычисляются отношения кодов, записанных в ячейки оперативного запоминающего устройства, к максимальному коду и определяются поправочные коэффициенты Kk=ΔNmax/ΔNk. После этого каждое значение ΔNk, ранее записанное в ячейку оперативной памяти, умножается на вычисленный для него поправочный коэффициент Kk и переписывается в ячейку памяти постоянного запоминающего устройства по аналогичному адресу, соответствующему расстоянию зонда до металлического листа, измеренному ультразвуковым датчиком 19.
В результате выполнения таких операций вычислительный блок 18 будет выдавать на регистратор 20 значения магнитной восприимчивости, практически не зависящие от изменения расстояния до исследуемой среды. При этом при оценке магнитных свойств различных пород необходимо учитывать их конкретные параметры, т.е. умножать полученные результаты на некоторый постоянный коэффициент, который определяется экспериментально и может быть введен в микроконтроллер при окончательной настройке устройства.
Применение дополнительного ультразвукового датчика с таким алгоритмом обработки сигналов в вычислительном блоке позволяет исключить влияние расстояния между зондом и поверхностью среды на геометрические факторы зонда G1, G2 и линеаризовать характеристику преобразования устройства.
Экспериментально установлено, что применение ультразвукового датчика для коррекции показаний позволяет его использовать при измерении магнитной восприимчивости среды с погрешностью менее 1,5% в расширенном диапазоне расстояний h/lгп=0,4 - 1,5, который в 1,5 раза превышает диапазон измерения прототипа, имеющего также меньшую точность преобразования.
Таким образом, в предлагаемом устройстве обеспечивается высокая чувствительность и точность бесконтактного измерения магнитной восприимчивости магнетитовых руд за счет применения резонансного режима работы приемного и компенсационных контуров с увеличением диапазона расстояний от зонда до поверхности исследуемой среды за счет применения ультразвукового датчика и вычислительного блока с автоматической обработкой сигналов для коррекции расстояния до исследуемой среды.
Устройство может быть реализовано на современной элементной базе при достижении заданного назначения. Например, можно использовать ультразвуковой датчик измерения расстояния типа HC-SR04 с диапазоном измерения 2-400 см и разрешением 0,3 см при напряжении питания 5 В (см. info@sensoren.ru, Arduino Library For Ultrasonic Ranging Module HC-SR04: документация на HC-SR04), а в качестве вычислительного блока - микроконтроллер типа TMP90С840Р.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРОБОВАНИЯ МАГНЕТИТОВЫХ РУД | 1992 |
|
RU2006888C1 |
| Система и способ контроля качества руды | 2024 |
|
RU2839567C1 |
| Зонд для опробования магнетитовых руд | 1975 |
|
SU555822A1 |
| Устройство для измерения магнитной восприимчивости и удельной электропроводности | 1984 |
|
SU1233078A1 |
| Зонд для измерения магнитной восприимчивости и удельной электропроводности (его варианты) | 1984 |
|
SU1231448A1 |
| Устройство для измерения магнитной восприимчивости и удельной проводимости среды | 1980 |
|
SU940109A2 |
| Устройство для магнитного опробования пород и руд на ленте транспортера | 1980 |
|
SU1004928A1 |
| Устройство для каротажа магнитной воспри-иМчиВОСТи | 1979 |
|
SU832514A1 |
| Устройство для измерения магнитной восприимчивости | 1989 |
|
SU1714546A1 |
| Устройство для опробования железной руды | 1980 |
|
SU920502A1 |
Изобретение относится к области неразрушающего контроля и может быть использовано для измерения магнитной восприимчивости магнетитовых руд при оперативном опробовании стенок горных выработок, а также для оценки качества рудной массы в навалах, вагонетках и на самосвалах. В составе устройства применены генератор синусоидального напряжения, нагруженный на генераторную катушку, две компенсационные и приемную катушки, размещенные на разных расстояниях от генераторной катушки в одной плоскости перпендикулярно поверхности исследуемой среды, два усилительно-преобразовательных блока, вычислительный блок, ультразвуковой датчик и регистратор. Параллельно компенсационным и приемной катушкам установлены три конденсатора, образующие три колебательных контура с одинаковой частотой резонанса. Технический результат – повышение чувствительности и точности устройства для оперативного опробования магнетитовых руд при бесконтактном измерении магнитной восприимчивости с увеличением допустимого диапазона расстояний от зонда до поверхности исследуемой среды. 1 ил.
Устройство для оперативного опробования магнетитовых руд, содержащее регистратор для вывода результатов контроля, генератор синусоидального напряжения, подключенный к зонду, содержащему генераторную, приемную и две компенсационные катушки, размещенные на разных расстояниях от генераторной катушки параллельно друг другу в одной плоскости перпендикулярно поверхности исследуемой среды, вторые выводы компенсационных катушек подключены к входам первого и второго усилительно-преобразовательных блоков, каждый из которых содержит последовательно соединенные усилитель переменного напряжения, синхронный детектор, подключенный к генератору, и усилитель постоянного тока, отличающееся тем, что в него дополнительно введены три конденсатора, подключенные соответственно параллельно приемной и двум компенсационным катушкам, ультразвуковой датчик и вычислительный блок, причем выходы первого и второго усилительно-преобразовательных блоков подключены к первому и второму входам вычислительного блока, третий вход которого соединен с выходом ультразвукового датчика, а выход вычислительного блока подключен к регистратору.
| УСТРОЙСТВО ДЛЯ ОПРОБОВАНИЯ МАГНЕТИТОВЫХ РУД | 1992 |
|
RU2006888C1 |
| Зонд для опробования магнетитовых руд | 1975 |
|
SU555822A1 |
| 0 |
|
SU154156A1 | |
| JPS 60212253 A, 24.10.1985. | |||

