Изобретение относится к устройствам смягчения ударов и вибровоздействий на объект и может быть использовано в тех областях народного хозяйства, где есть необходимость предохранить объект от нештатных нагрузок (в космической технике, автомобильной промышленности, судостроении, машиностроении, приборостроении и т. п. )
Известна система амортизации (СА) кузова автомобиля, описанная, например, в [1] и содержащая группу амортизаторов, размещенных между кузовом и передним и задним мостом автомобиля. Указанная СА смягчает толчки и удары кузова от неровностей дороги.
Недостатком упомянутой СА является ее способность защитить объект (кузов автомобиля) только в одном (вертикальном) направлении.
Известна также система амортизации объекта, описанная в [2] и принятая в качестве прототипа. СА содержит амортизаторы, установленные в одной плоскости на несущей конструкции, например, транспортного средства. При этом подвижные элементы амортизаторов соединены с объектом.
При работе СА (из-за перегрузок и смещений несущей конструкции) подвижные элементы амортизаторов, смещаясь, снижают нагрузки на амортизируемый объект.
Прототип имеет следующие недостатки:
- СА способна защитить объект только в случае малых (доли миллиметра, см. [2] ) колебаний и толчков несущей конструкции;
- расположение (в одной плоскости) амортизаторов, принятое в СА-прототипе, не обеспечивает одинаково эффективную защиту объекта по всем (шести) степеням свободы;
- в случае недостаточности рабочего пространства затруднен или невозможен монтаж и демонтаж СА объекта.
Задачей настоящего изобретения является обеспечение эффективной ударо- и виброзащиты объекта по всем шести степеням свободы, в том числе при значительных амплитудах смещений несущей конструкции относительно амортизируемого объекта (на два порядка больших, чем в прототипе).
Задачей изобретения является также обеспечение плавного (бесшумного) процесса амортизации.
Кроме того, задачей изобретения является обеспечение простоты монтажа и демонтажа СА объекта, в том числе в условиях отсутствия пространства для сборки и разборки СА.
Задача решается тем, что в системе амортизации объекта, содержащей n≥3 групп амортизаторов, каждая из которых расположена вдоль объекта параллельно его продольной оси, амортизаторы расположены в S≥2 плоскостях, перпендикулярных продольной оси объекта. При этом в любой i-той плоскости (при i= 1, . . . , S) установлено m≥3 амортизаторов, причем оси амортизаторов каждой из плоскостей i по отношению к осям амортизаторов смежных плоскостей перпендикулярны. Кроме того, для каждого из амортизаторов введены контактные поверхности, плоскость контакта которых перпендикулярна оси соответствующего амортизатора. В упомянутые контактные поверхности упираются соответствующие подвижные элементы амортизаторов. При этом корпус каждого амортизатора жестко связан с корпусом объекта. Дополнительно введены, по крайней мере, два торцевых пояса амортизаторов, установленных на кольцевом фланце, жестко закрепленном на объекте. При этом плоскость фланца перпендикулярна продольной оси объекта, а количество амортизаторов на торцевом поясе к≥1. Оси амортизаторов параллельны продольной оси объекта, а для каждого амортизатора введены контактные поверхности, плоскость которых перпендикулярна оси соответствующего амортизатора.
Подвижные элементы амортизаторов имеют сферическую поверхность.
Все амортизаторы установлены в предварительно поджатом состоянии.
В случае, если подвижный элемент амортизатора выполнен из эластичного материала, его контактная поверхность выполнена из фторопласта и имеет плоскую форму.
Сущность изобретения поясняется чертежами:
- на фиг. 1 представлен вид сбоку на предлагаемую СА объекта (в качестве амортизируемого объекта изображен бак);
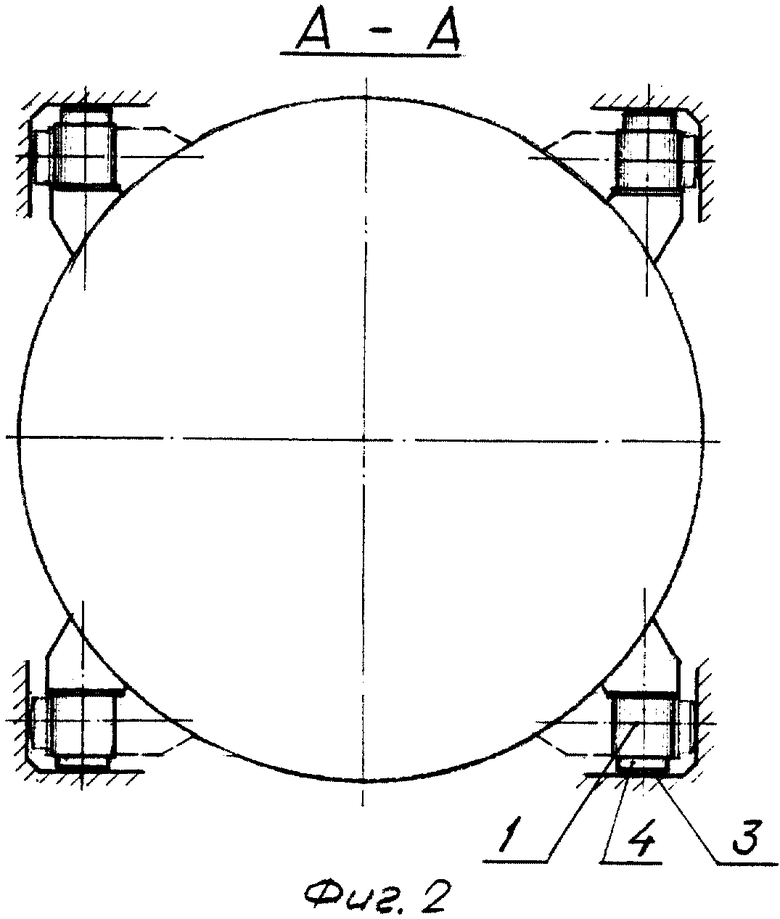
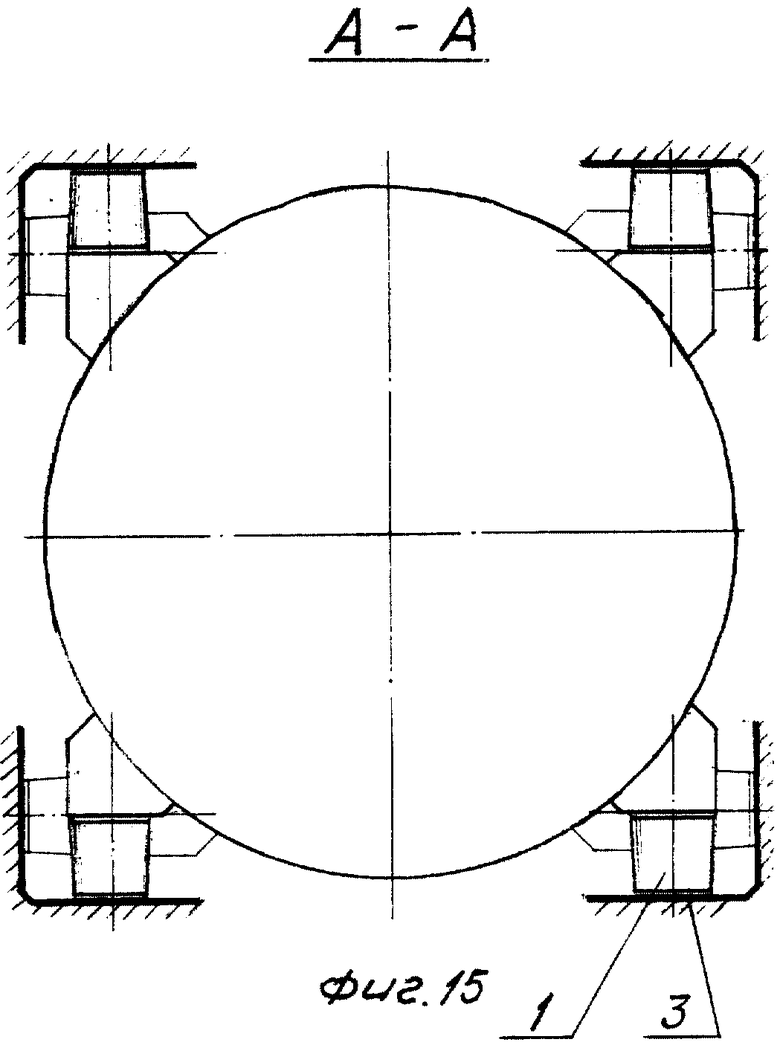
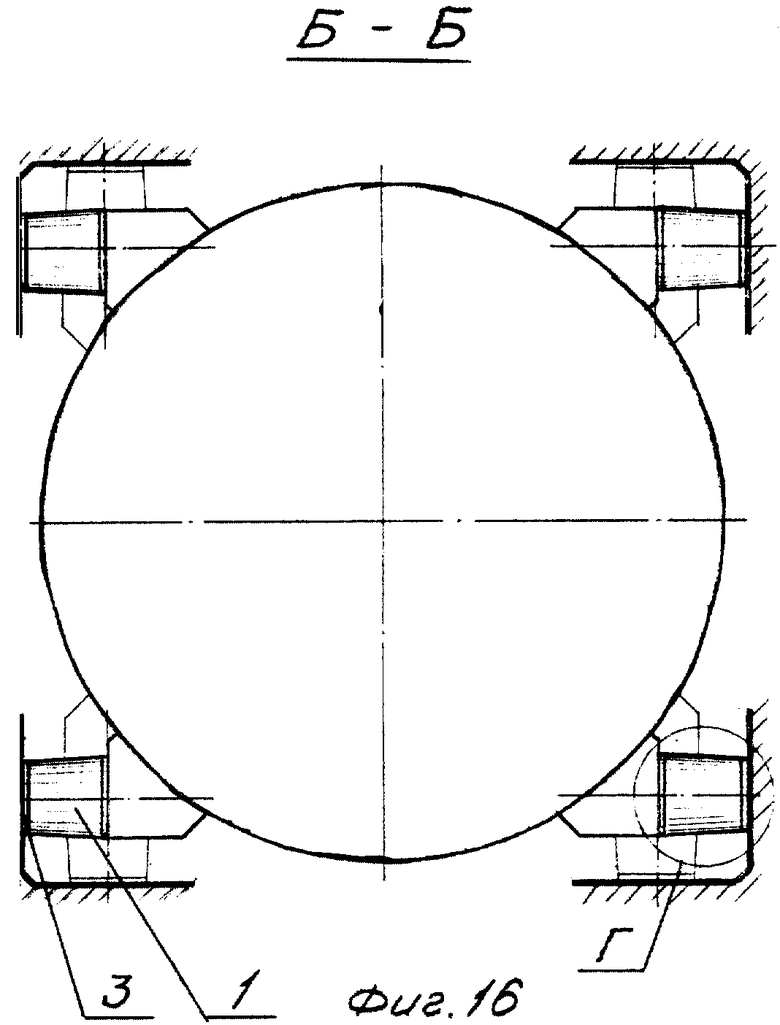
- на фиг. 2, 3 представлены виды на предлагаемую СА в соответствующих сечениях;
- на фиг. 4 представлен вид на предлагаемую СА со стороны кольцевого фланца СА;
- на фиг. 5 представлен общий вид амортизатора;
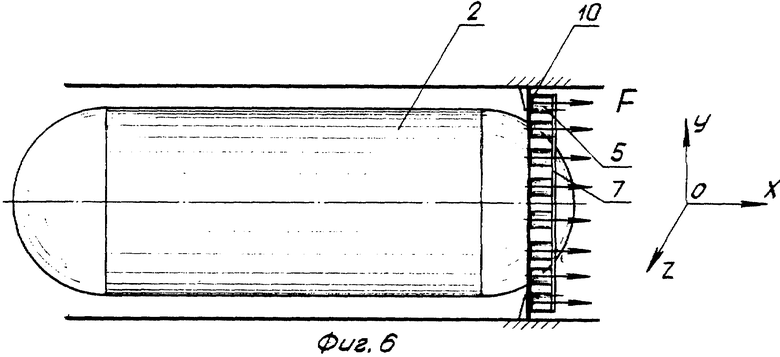
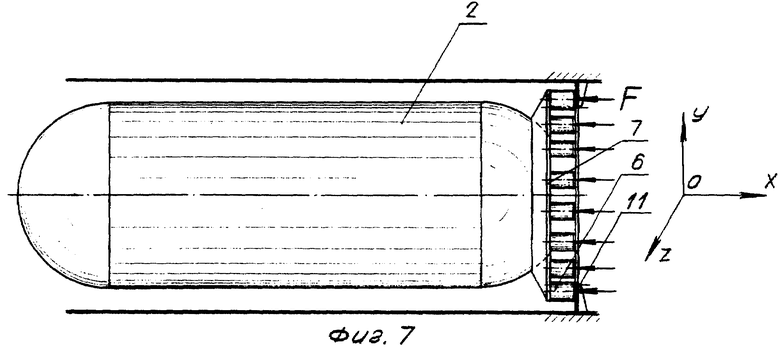
- на фиг. 6, 7 поясняется работа СА в случае продольного (вдоль продольной оси объекта) смещения контактных поверхностей;
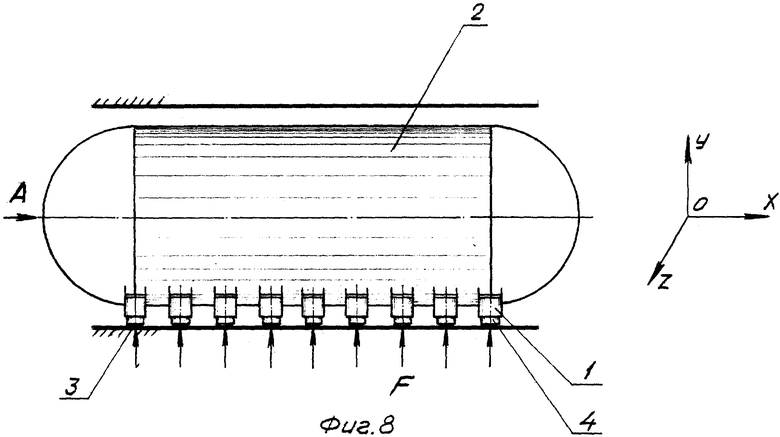
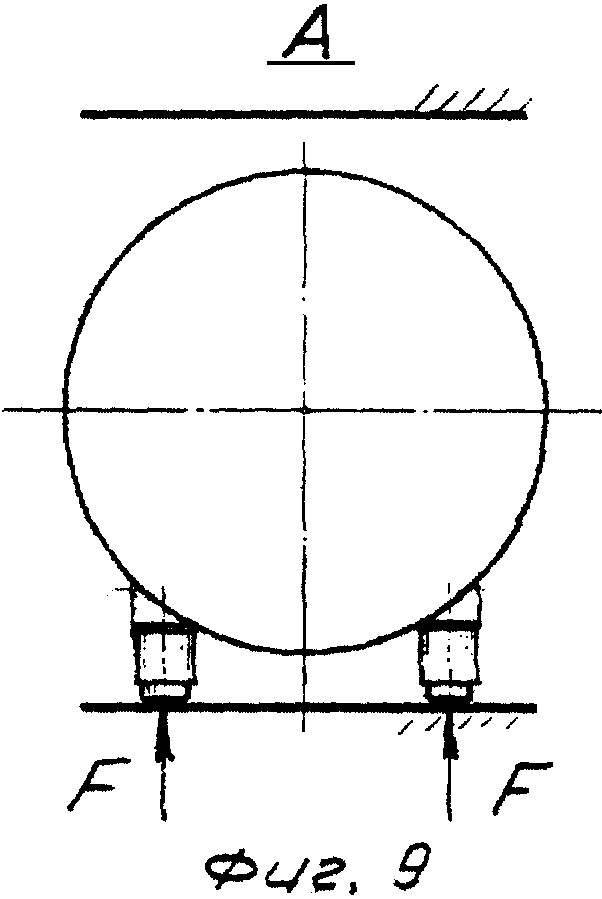
- на фиг. 8, 9 поясняется работа СА в случае бокового смещения контактных поверхностей;
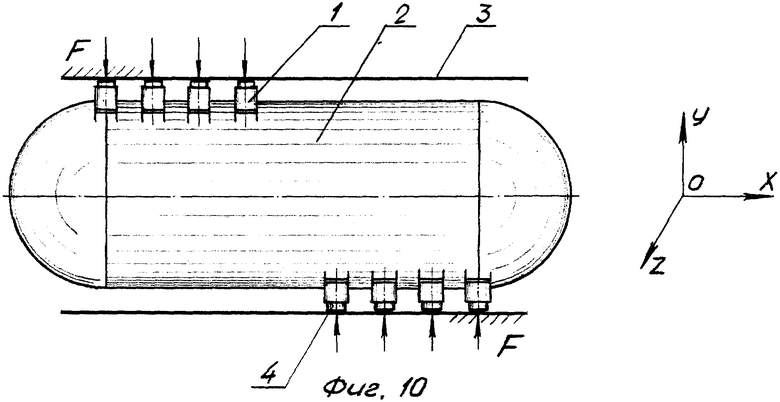
- на фиг. 10, 11 поясняется работа СА в случае вращения контактных поверхностей вокруг поперечных осей объекта;
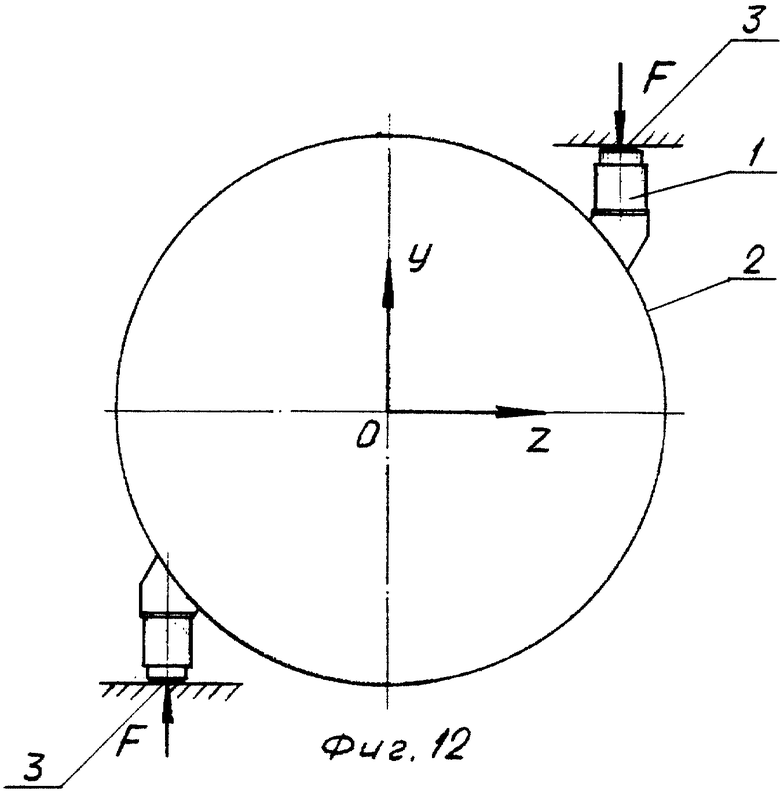
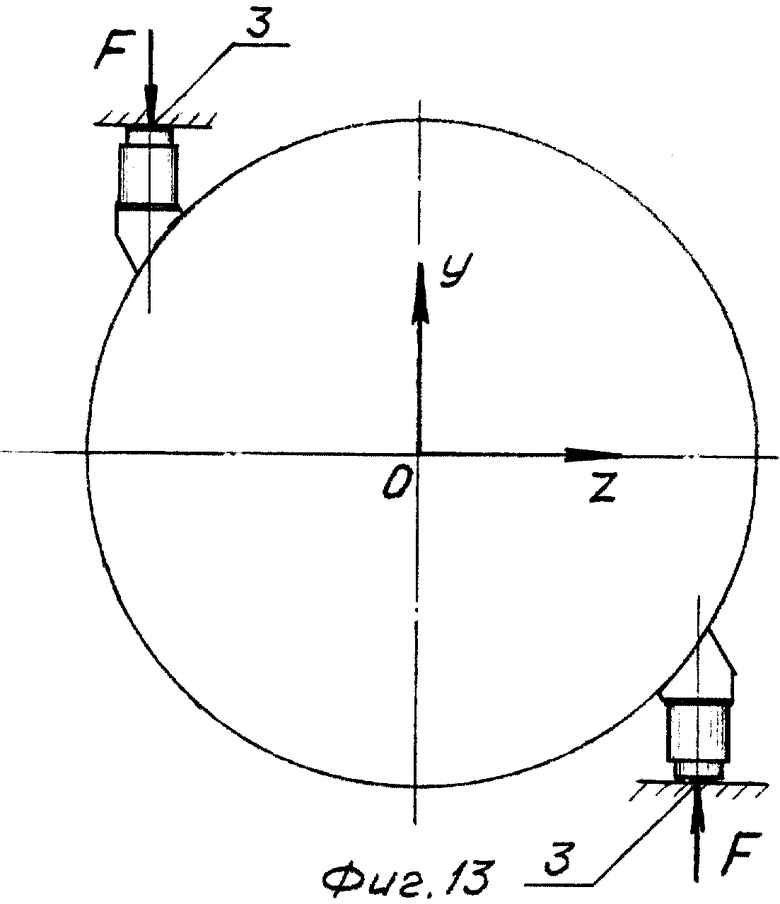
- на фиг. 12, 13 поясняется работа СА в случае вращения контактных поверхностей вокруг продольной оси объекта;
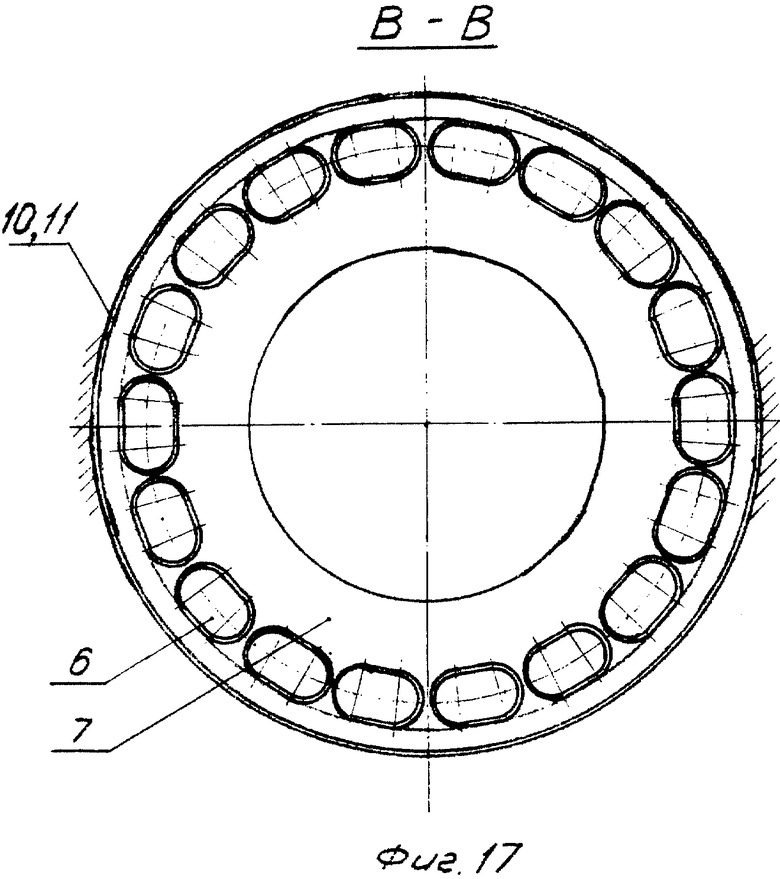
- на фиг. 14, . . . , 19 представлены виды на предлагаемую СА, состоящую из амортизаторов, выполненных из эластичных материалов.
На чертежах представлены следующие позиции:
1 - амортизаторы;
2 - объект;
3, 10, 11 - контактные поверхности;
4, 8, 9 - подвижные элементы амортизаторов;
5, 6 - амортизаторы торцевых поясов;
7 - кольцевой фланец;
12 - сферическая поверхность подвижных элементов;
13 - корпус амортизатора.
Предлагаемая система амортизации объекта (фиг. 1, 2, . . . . , 5) содержит четыре (n= 4) группы амортизаторов 1, каждая из которых расположена вдоль объекта 2 параллельно его продольной оси. На приведенном примере амортизаторы 1 размещены в пятнадцати (S= 15) плоскостях, перпендикулярных продольной оси объекта 2. Причем оси амортизаторов 1 в любой из плоскостей i (i= 1, 2, . . . , 15) по отношению к осям амортизаторов 1 смежных плоскостей перпендикулярны (см. фиг. 2, 3). Кроме того, для каждого из амортизаторов 1 введены контактные поверхности 3, плоскость контакта которых перпендикулярна оси соответствующего амортизатора 1. В контактные поверхности 3 упираются соответствующие подвижные элементы 4 амортизаторов 1. При этом корпус 13 каждого амортизатора 1 жестко связан с корпусом объекта 2.
Предлагаемая система амортизации содержит также два торцевых пояса амортизаторов 5, 6, установленных на кольцевом фланце 7, жестко закрепленном на объекте 2. При этом плоскость фланца 7 перпендикулярна продольной оси объекта 2, а количество амортизаторов 5, 6 в составе каждого торцевого пояса равно, например, k= 18. Причем оси амортизаторов 5, 6 параллельны продольной оси объекта 2, а подвижный элемент 8 или 9 каждого амортизатора 5, 6 имеет контактные поверхности, соответственно, 10, 11, плоскости которых перпендикулярны осям амортизаторов 5, 6. При этом подвижные элементы 4, 8, 9 амортизаторов 1, 5, 6 имеют сферическую поверхность 12 (фиг. 5). Причем амортизаторы 1, 5, 6 в рабочем состоянии (в составе СА) находятся в поджатом состоянии.
В случае изготовления амортизаторов 1, 5, 6, например, из эластомера (резины), фиг. 14, . . . , 19, сферическая поверхность 12 амортизаторов выполняется, например, из фторопласта и имеет плоскую форму.
Сборка СА состоит из следующих операций:
а) монтаж амортизаторов 1 на корпусе объекта 2, монтаж амортизаторов 5, 6 на фланце 7;
б) размещение объекта 2 с установленными на нем амортизаторами 1, 5, 6 на рабочее место между контактными поверхностями 3, 10, 11;
в) утапливание подвижных элементов 4, 8, 9 контактными поверхностями 3, 10,11 в корпус 13 амортизаторов 1, 5, 6 на заданную величину.
(В ряде случаев пп. б) и в) совмещаются).
Из-за образовавшегося поджатия амортизаторов 1, 5, 6 при штатных (в процессе эксплуатации) угловых и линейных смещениях контактных поверхностей 3, 10, 11 относительно корпуса объекта 2 не происходит отрыва упомянутых поверхностей от подвижных элементов 4, 8, 9. Это имеет следствием плавную и бесшумную работу СА.
Рассмотрим работу предлагаемой СА для различных случаев смещений контактных поверхностей (КП) 3, 10, 11 относительно корпуса объекта 2.
Пусть OXYZ - инерциальная система координат (фиг. 6) и пусть КП 10 смещается в направлении +ОХ. При этом в корпус амортизаторов 5 утапливаются их подвижные элементы 8, создавая заданные амортизирующие силы F, действующие на фланец 7 и через него - на амортизируемый объект 2.
Пусть (фиг. 7) КП 11 смещается в направлении -ОХ. При этом в корпус амортизаторов 6 утапливаются их подвижные элементы 9, создавая заданные амортизирующие силы F, действующие на фланец 7 и через него - на объект 2.
Пусть КП 3 (фиг. 8, 9) смещается в направлении +OY. При этом в корпус амортизаторов 1 утапливаются их подвижные элементы 4, создавая заданные амортизирующие силы F, действующие на объект 2. Аналогичное данному случаю создание амортизирующих сил имеет место при смещении КП 3 в направлении -ОY, +OZ, -OZ.
Пусть КП 3 (фиг. 10) поворачиваются по часовой стрелке вокруг оси +OZ. При этом в корпус амортизаторов 1 утапливаются их подвижные элементы 4, создавая заданные амортизирующие силы F (и соответственно моменты), действующие на объект 2. Аналогичное данному случаю создание амортизирующих сил и моментов имеет место при поворотах КП 3 вокруг оси -OZ (фиг. 11), а также вокруг осей +OY, -OY.
Пусть КП 3 поворачиваются по часовой стрелке вокруг оси + ОХ. При этом в корпус 13 амортизаторов 1 (фиг. 12) утапливаются их подвижные элементы 4, создавая заданные амортизирующие силы F, действующие на объект 2. Аналогичное создание амортизирующих сил имеет место при повороте (по часовой стрелке) КП 3 вокруг оси -ОХ (фиг. 13).
Чтобы работа СА не зависела от возможных угловых рассогласований нормалей контактных поверхностей 3, 10, 11 и осей амортизаторов 1, 5, 6, подвижные элементы 4, 8, 9 амортизаторов 1, 5, 6 имеют сферическую поверхность 12 (фиг. 5).
Работа предлагаемой СА в случае использования резиновых амортизаторов (фиг. 14, . . . , 19) аналогична описанной.
Предлагаемое техническое решение позволяет осуществлять эффективную защиту объекта от толчков и вибровоздействий по всем шести степеням подвижности. В том числе - при перемещениях контактных поверхностей до 60 мм (т. е. на два порядка больших, чем в прототипе).
В штатном режиме эксплуатации система амортизации обеспечивает плавную и бесшумную амортизацию объекта.
При нештатных возмущениях (перемещениях) контактных поверхностей плавность и бесшумность работы СА могут нарушаться, однако эффективность работы СА не нарушается. До тех пор, пока ход амортизации не будет выбран полностью.
Предлагаемое техническое решение позволяет осуществлять монтаж и демонтаж системы амортизации в условиях ограниченного или полного отсутствия пространства для сборки и разборки СА.
Реализация предложенной системы амортизации не представляет сложности, т. к. все ее комплектующие производятся отечественной промышленностью.
Литература.
1. Н. Н. Вишняков и др. . Автомобиль. Основы конструкции, 1986 г.
2. ГОСТ 17053.1, ГОСТ 17053.2 - 80.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АМОРТИЗАЦИИ ОБЪЕКТА | 2000 |
|
RU2178536C1 |
| СИСТЕМА АМОРТИЗАЦИИ ОБЪЕКТА | 2001 |
|
RU2209352C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ БЫТОВЫХ ПРИБОРОВ | 2001 |
|
RU2213515C2 |
| ВОЛНОВОЙ ПРИВОД И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 1999 |
|
RU2165044C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2201003C2 |
| ТРАНСФОРМИРУЕМАЯ КОНСТРУКЦИЯ | 2000 |
|
RU2167789C1 |
| ОСЕВОЙ ВЕНТИЛЯТОР И СПОСОБ ЕГО СБОРКИ | 2000 |
|
RU2174193C1 |
| КОНЦЕНТРИРУЮЩЕЕ УСТРОЙСТВО | 2000 |
|
RU2183002C2 |
| ПРОТЕЗ СУСТАВА | 2001 |
|
RU2198626C2 |
| УСТАНОВКА ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2200528C1 |







Изобретение относится к устройствам смягчения ударов и вибровоздействий на объект и может быть использовано в космической технике, автомобильной промышленности, судостроении, приборостроении и т. п. Согласно изобретению система содержит не менее трех групп амортизаторов, каждая из которых расположена вдоль продольной оси объекта. Амортизаторы расположены в плоскостях, перпендикулярных продольной оси объекта. В любой плоскости установлено не менее трех амортизаторов, причем оси этих амортизаторов перпендикулярны осям амортизаторов смежных плоскостей. Для каждого из амортизаторов введены контактные поверхности, перпендикулярные его оси. В эти поверхности упираются подвижные элементы амортизаторов. Дополнительно введены по крайней мере два торцевых пояса амортизаторов, установленных на кольцевом фланце, жестко закрепленном на объекте. Оси амортизаторов на поясах параллельны продольной оси объекта. Все амортизаторы установлены на объекте в поджатом состоянии. Изобретение позволяет осуществлять монтаж и демонтаж системы амортизации в условиях ограниченного или полного отсутствия пространства для сборки и разборки системы. 3 з. п. ф-лы, 19 ил.
| Амортизаторы корабельные АКСС-М и арматура | |||
| Приспособление для надрезывания пришивных подошв | 1928 |
|
SU17053A1 |
| - М.: ИПК изд | |||
| Стандартов, 1996 | |||
| US 5337863 А, 16.08.1994 | |||
| СПОСОБ ИЗМЕНЕНИЯ ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ КОРПУСА ДЛИННОМЕРНОЙ КОНСТРУКЦИИ | 1992 |
|
RU2039893C1 |
| ВИБРОЗАЩИТНАЯ ПЛАТФОРМА | 1992 |
|
RU2093730C1 |

