Изобретение относится к области авиационной техники, в частности к механизмам систем управления летательными аппаратами, и предназначено для реализации на воздушных судах любого назначения.
Прототипом может служить педальный механизм, являющийся частью системы управления рулями самолета (Проектирование самолетов: Учебник для вузов / С. М. Егер, В. Ф. Мишин, Н. К. Лисейцев и др. Под. ред. С. М. Егера - 3-е изд. , М. : Машиностроение, 1983, стр. 512, рис. 18.20 - 1), который содержит педали, закрепленные на плечах двуплечего рычажно-параллелограммного механизма (другое название - параллелограммного механизма), который в средней своей части шарнирно закреплен на неподвижной конструкции на оси, перпендикулярной плоскости рычажно-параллелограммного механизма, загрузочный механизм педалей (он может называться механизмом загрузки), тягу управления рулем направления (она может называться тягой к проводке управления рулем направления), а также другие элементы.
Тяга управления рулем направления самолета шарнирно соединена с элементом, жестко соединенным с рычагом рычажно-параллелограммного механизма. Загрузочный механизм педалей находится между тягой управления рулем направления и проводкой управления рулем направления и соединяет их.
Недостатком описанного устройства является то, что при перемещении одной из педалей вперед вторая педаль перемещается назад на такое же расстояние. При этом колено ноги пилота перемещается вверх, затеняет для обзора часть приборной доски и ограничивает угол перемещения штурвала (ручки управления самолетом) по крену.
Задачей изобретения является улучшение обзора приборной доски при управлении рулем направления самолета и расширение возможной зоны отклонения штурвала или ручки управления по крену за счет разноходовости педалей.
Задача решается тем, что устройство с разноходовыми педалями для управления рулем направления самолета, содержащее левую и правую педали, механизм загрузки, тягу к проводке управления рулем направления, отличается тем, что оно содержит два элемента, определяющих траектории движения упомянутых педалей, две тяги равной длины, каждая из которых одним концом шарнирно соединена с одной из упомянутых педалей, а другим концом соединена с помощью центрального шарнира с другой из этих двух тяг, с упомянутой тягой к проводке управления рулем направления и с элементом, определяющим перемещение центрального шарнира относительно корпуса самолета, причем оси всех упомянутых шарнирных соединений перпендикулярны плоскости перемещения педалей.
Элементы, определяющие траектории движения упомянутых педалей, могут быть выполнены, например, в виде:
- рычажно-параллелограммных механизмов, каждый из которых одним звеном жестко закреплен относительно корпуса самолета, а противоположным звеном соединен с одной из упомянутых педалей;
- рычагов, каждый из которых одним концом шарнирно закреплен относительно корпуса самолета, а другим концом шарнирно соединен с одной из упомянутых педалей;
- направляющих (этот вариант позволяет уменьшить габаритные размеры устройства).
Элемент, определяющий перемещение центрального шарнира относительно корпуса самолета, может быть выполнен, например, в виде:
- рычага, одним концом соединенного центральным шарниром с упомянутыми тягами и другим концом соединенного с шарниром, ось которого неподвижна относительно корпуса самолета и перпендикулярна плоскости перемещения педалей;
- каретки, скользящей по направляющей, причем упомянутые тяги соединены центральным шарниром с кареткой, направляющая лежит в плоскости перемещения педалей, и концы направляющей жестко закреплены относительно корпуса самолета (такой вариант позволяет уменьшить габаритные размеры устройства).
Направляющая в элементе, определяющем перемещение центрального шарнира, может иметь форму:
- дуги, выпуклость которой обращена в сторону педалей;
- прямой, перпендикулярной направлению перемещения педалей;
- другую форму, обеспечивающую разноходовость педалей.
Механизм загрузки может быть размещен так, что он соединен одним концом с упомянутым центральным шарниром, а другим концом закреплен относительно корпуса самолета.
Указанное выполнение позволяет уменьшить обратный ход педали по отношению к прямому ходу другой педали.
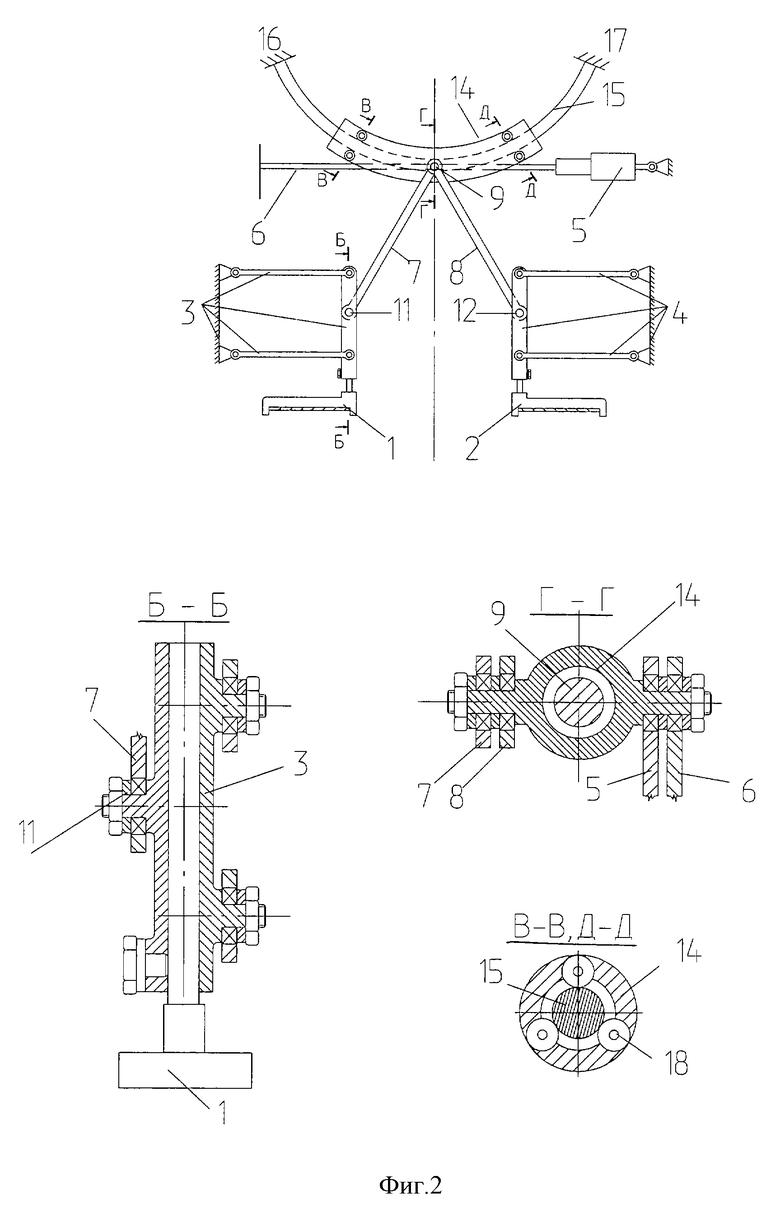
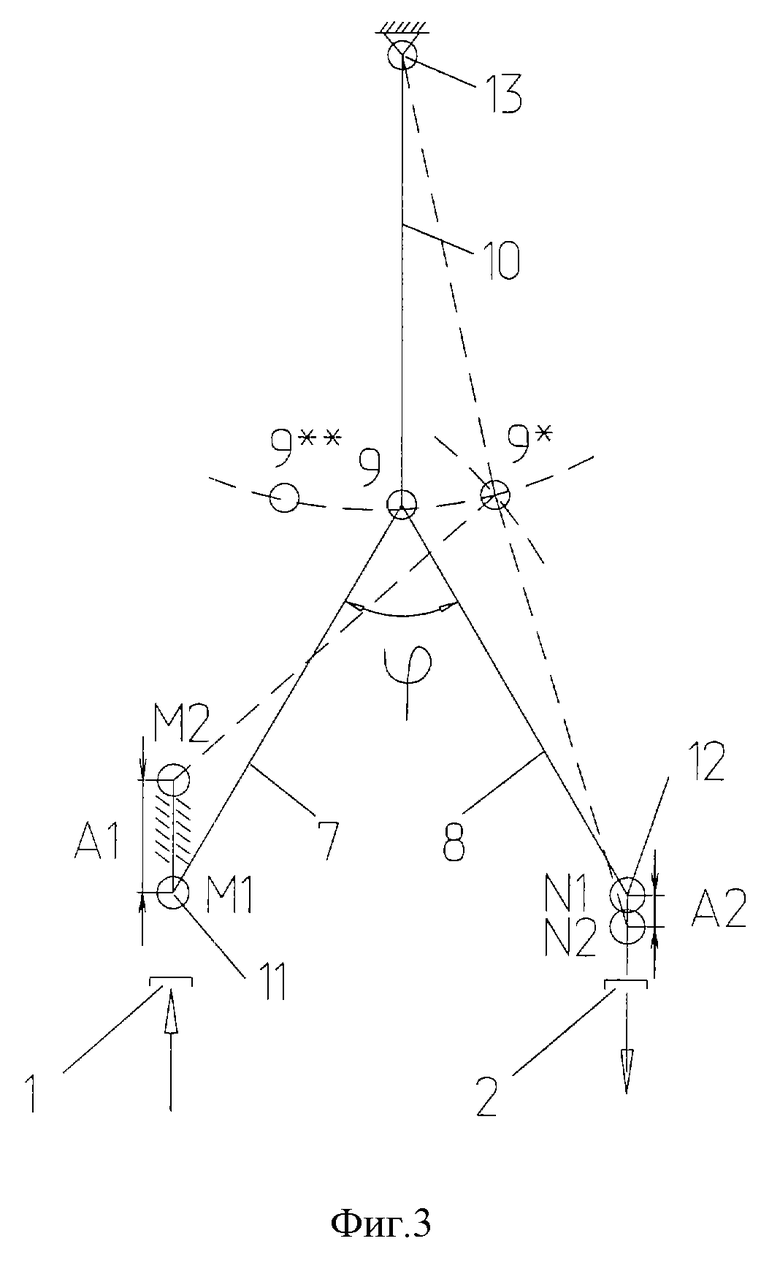
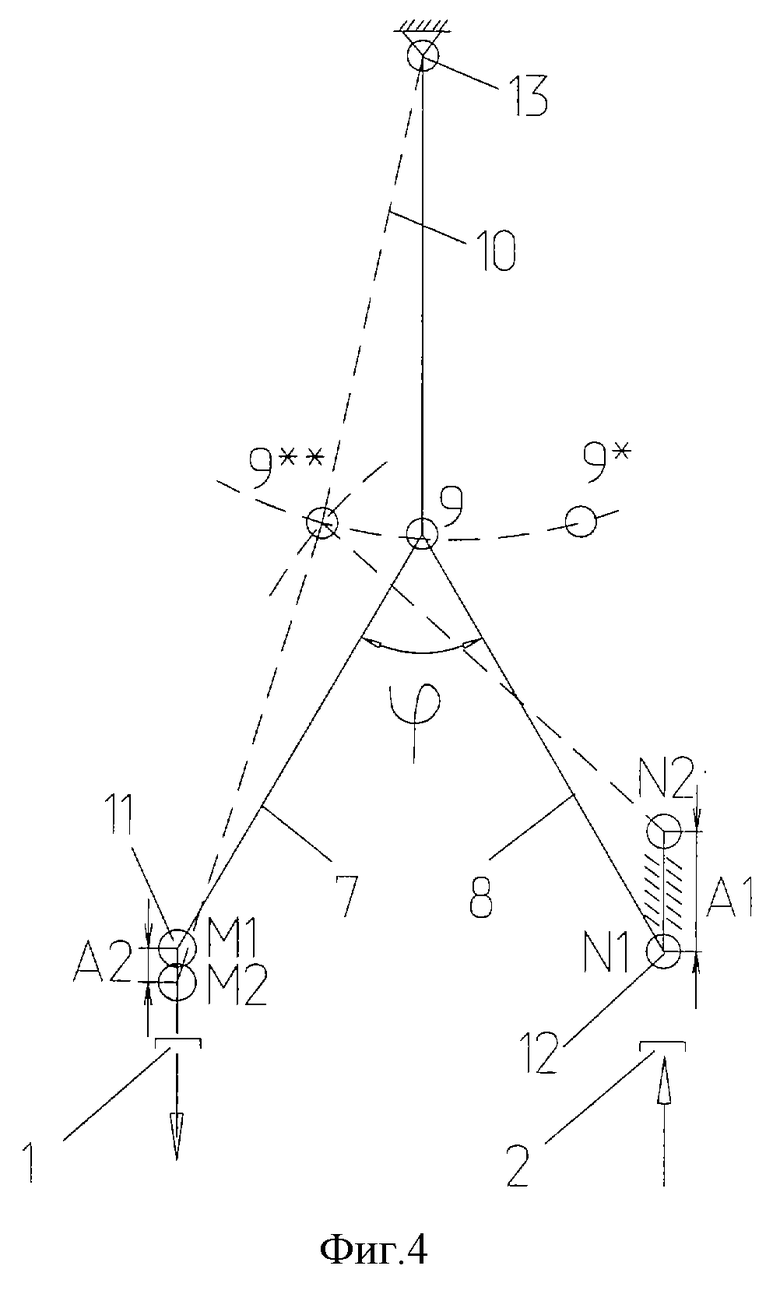
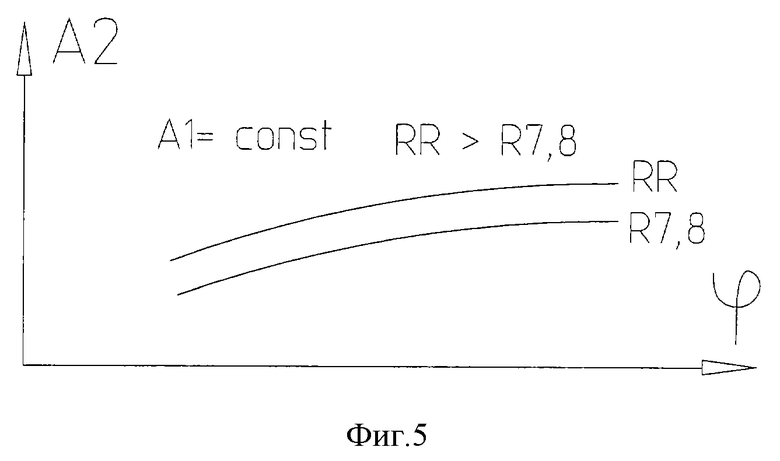
Изобретение поясняется чертежами. На фиг. 1 и фиг. 2 изображена конструктивная схема предлагаемого устройства для случая, когда элементы, определяющие траектории движения педалей, выполнены в виде рычажно-параллелограммных механизмов. При этом на фиг. 1 элемент, определяющий перемещение центрального шарнира, изображен в виде рычага, а на фиг. 2 - в виде каретки, скользящей по направляющей, имеющей форму дуги. На фиг. 1 и фиг. 2 разрезы А-А, Б-Б, В-В, Г-Г, Д-Д даны с увеличением масштаба в 2,5 раза. На фиг. 3 приведена кинематическая схема устройства при движении вперед левой педали, на фиг. 4 - кинематическая схема устройства при движении вперед правой педали, на фиг. 5 - характер зависимости величин обратного хода А2 одной из педалей от некоторых параметров устройства.
Устройство для управления рулем направления самолета содержит левую (1) и правую (2) педали, соединенные с элементами (3) и (4), которые определяют траектории их движения, механизм загрузки (5), тягу (6) к проводке управления рулем направления, тяги (7) и (8) равной длины, которые соединены посредством шарнира (9) (центрального) друг с другом, с тягой (6) и с элементом (10), определяющим перемещение шарнира (9) относительно корпуса самолета.
Показанные на фиг. 1 и фиг. 2 в качестве элементов (3) и (4) рычажно-параллелограммные механизмы одним звеном жестко закреплены относительно корпуса самолета, а противоположным звеном соединены шарнирами (11) и (12) с педалями (1) и (2) и другими концами тяг (7) и (8) соответственно. Оси шарниров (9), (11) и (12) перпендикулярны плоскости перемещения педалей. Выполненные так элементы (3) и (4) задают движение педалей по дугам. Элементы (3) и (4) могут быть выполнены также и другим образом, например, в виде рычагов, одним концом шарнирно закрепленных относительно корпуса самолета, а другим - шарнирно соединенных с одной из педалей, или в виде направляющих.
Механизм загрузки (5) предназначен для возврата педалей (1) и (2) в нейтральное положение. На фиг, 1 и фиг. 2 показан вариант, когда он соединен одним концом с шарниром (9), а другим - закреплен относительно корпуса самолета.
Элемент (10) может быть выполнен (см. фиг. 1) в виде рычага, который одним концом соединен с шарниром (9), а другим - через шарнир (13), ось которого перпендикулярна плоскости перемещения педалей, связан с корпусом самолета. Рычаг имеет длину RR и может поворачиваться относительно оси шарнира (13) при воздействии на ось шарнира (9).
Элемент (10) может быть выполнен также (см. фиг. 2) в виде каретки (14), скользящей по направляющей (15) при воздействии на ось шарнира (9). Концы направляющей (15) жестко связаны с корпусом самолета в точках (16) и (17). Направляющая (15) расположена в плоскости перемещения педалей (1) и (2) и может иметь любую форму, которая обеспечивает разноходовость педалей (1) и (2). На фиг. 2 показан вариант, когда направляющая имеет форму дуги с радиусом RR, которая обращена выпуклостью в сторону педалей (1) и (2).
Для уменьшения сопротивления при перемещении каретки (14) по направляющей (15) в каретке предусмотрены подшипники (18).
Работа устройства иллюстрируется кинематическими схемами (см. фиг. 3, 4). Оси шарниров (11) и (12) при движении педалей (1) и (2) могут совершать возвратно-поступательные движения М1М2 и N1N2. Перемещение педали (1) из положения М1 в М2 (см. фиг. 3) изменяет положение оси шарнира (11), которое через тягу (7) передается к оси шарнира (9). Ось (9) смещается в точку (9*) по дуге радиуса RR и увлекает за собой тягу (8). При этом педаль (2) перемещается из положения N1 в положение N2. Величина перемещения N1N2 существенно меньше величины перемещения М1М2. Аналогично при перемещении вперед педали (2) (см. фиг. 4) величина перемещения М1М2 будет существенно меньше перемещения N1N2. Таким образом обеспечивается разноходовость педалей от нейтрального положения при их движении на и от летчика.
Фиг. 5 иллюстрирует характер зависимости величины обратного хода А2 одной педали при постоянном ходе А1 другой педали вперед для различных значений угла ϕ между тягами (7) и (8) при различных значениях R7 и R8, соответствующих длинам тяг (7) и (8), и величины RR.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2000 |
|
RU2178373C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПОЛОЖЕНИЯ РУКОЯТКИ УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2193991C1 |
| ВОЗДУХОЗАБОРНИК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2140378C1 |
| СИСТЕМА АВАРИЙНОГО СБРОСА ФОНАРЯ ДВУХМЕСТНОЙ КАБИНЫ САМОЛЕТА | 1997 |
|
RU2130857C1 |
| ДВЕРЬ-ТРАП | 2000 |
|
RU2193505C2 |
| УСТРОЙСТВО ДЛЯ НОЖНОГО УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2090447C1 |
| УБИРАЮЩЕЕСЯ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2088478C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МАРШЕВЫХ ДВИГАТЕЛЕЙ САМОЛЕТА | 1998 |
|
RU2122510C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
Изобретение относится к авиации. Устройство содержит две педали, два элемента, определяющие траектории их движения, две тяги равной длины, соединенные одним концом с одной из педалей, а другим концом с помощью центрального шарнира - с другой из этих двух тяг, с тягой к проводке управления рулем направления, с элементом, определяющим перемещение центрального шарнира относительно корпуса самолета, с механизмом загрузки. Элементы, определяющие траектории движения педалей, выполнены в виде рычажно-параллелограммных механизмов в виде рычагов или в виде направляющих. Элемент, определяющий перемещение центрального шарнира, выполнен в виде рычага, который вторым концом шарнирно закреплен относительно корпуса самолета, или в виде каретки, скользящей по направляющей. Изобретение направлено на улучшение обзора приборной доски при управлении рулем направления и расширение возможной зоны отклонения штурвала или ручки управления по крену. 9 з. п. ф-лы, 5 ил.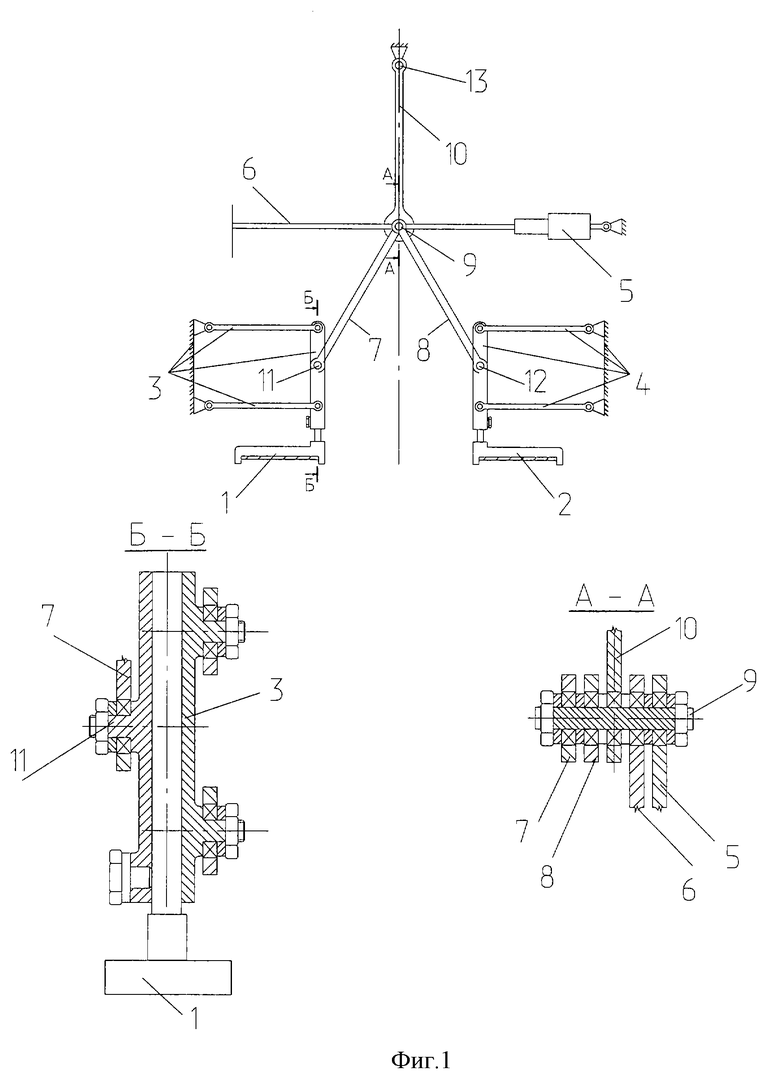
| Проектирование самолетов/ Под ред | |||
| Егера С.М | |||
| -М.: Машиностроение, 1983, с.512 | |||
| УСТРОЙСТВО ДЛЯ НОЖНОГО УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2090447C1 |
| US 4192476 А, 11.03.1980 | |||
| МЕХАНИЗМ РЕГУЛИРОВКИ ТЕТИВЫ | 2001 |
|
RU2192598C1 |

