Изобретение относится к системам управления самолетов посредством изменения вектора тяги.
Из патентной литературы известны устройства для управления летательным аппаратом (см. например, заявки ФРГ N 3222674, кл. В 64 С 15/02, 22.12.83, N 3609457, кл. В 64 С 15/02, 25.09.86, N 3909347/А1, кл. В 64 С 15/02, 27.09.90).
Также известна система управления самолетов, применяемая на демонстрационном самолете F-15 S МТД (см. Техническая информация ЦАГИ, N 8, 1987, с. 11-13).
В этой системе продольный момент для управления самолета создается отклонением вектора тяги обоих двигателей вверх или вниз при помощи поворота створок в расширяющейся части сопла, поперечный - отклонением вектора тяги одного двигателя вверх, а другого вниз, путевой - уменьшением осевого составляющей одного двигателя и увеличением другого при помощи створок в сужающейся части сопла и поворотом створок решетки, расположенной там же.
Наиболее близким аналогом, рассматриваемым в качестве прототипа, является система управления двухдвигательного самолета, описанная в патенте РФ N 2084375, кл. В 64 С 15/02, опубл. 20.07.97.
В этой системе сигналы датчиков органов управления и угловых скоростей поступают в вычислительные устройства, формирующие требуемые отклонения вектора тяги обоих двигателей вокруг горизонтальной оси, что обеспечивает создание управляющих моментов по крену и тангажу. Момент рысканья создается за счет изменения подачи топлива в каждый двигатель. Указанная система имеет ряд недостатков.
Из-за того, что сигналы датчиков перемещений ручки и датчиков угловых скоростей поступают непосредственно на приводы поворотных сопел, сопла непрерывно перемещаются, в результате чего быстро вырабатывается ресурс сопла, что приводит к необходимости ремонта или замены створок сопла в процессе эксплуатации.
Отсутствие ограничений работы сопла по скоростному напору приводит к тому, что сопло перемещается при полетах на тех скоростных напорах, где эффективность аэродинамических поверхностей достаточна и управление при помощи вектора тяги не требуется. Это также приводит к преждевременной выработке ресурса и снижению надежности работы системы. Сопло отклоняется на больших высотах, где из-за пониженной теплоотдачи происходит перегрев и разрушение створок.
Создание момента рысканья путем изменения подачи топлива в тех случаях, когда маневр выполняется при максимальной тяге обоих двигателей, приводит к уменьшению величины полной тяги, что снижает эффективность маневра.
Задачей изобретения является создание системы управления самолетом с помощью вектора тяги, которая не имеет перечисленных выше недостатков.
Технический результат достигается тем, что в систему управления двухдвигательного самолета, содержащую вычислители продольного и путевого управления аэродинамическими поверхностями, электрогидравлические приводы правого и левого сопла, электрические сумматоры правого и левого сопла, датчики углов атаки, скоростного напора и высоты, дополнительно введены поворотные сопла, оси вращения которых расположены под углом к горизонтальной плоскости самолета, корректор усиления по углу атаки, первый вход которого соединен с выходом вычислителя продольной системы управления аэродинамическими поверхностями, а второй вход с выходом датчика угла атаки, электронный усилитель, прямой вход которого соединен с выходом вычислителя продольного управления, а инвертирующий вход с выходом корректора усиления по углу атаки, нелинейный усилитель продольного канала, вход которого соединен с выходом электронного усилителя, суммирующий усилитель, первый вход которого соединен с выходом корректора усиления по углу атаки, второй вход с выходом нелинейного усилителя продольного канала, а выход с прямыми входами электрических сумматоров правого и левого сопла, нелинейный усилитель путевого канала, вход которого соединен с выходом вычислителя путевого канала, а выход с вторым прямым входом электрического сумматора правого сопла и инвертирующим входом электрического сумматора левого сопла, корректор по скоростному напору и корректор по высоте правого сопла, корректор по скоростному напору и корректор по высоте левого сопла, первые входы которых соединены соответственно с выходами электрических сумматоров правого и левого сопла, а вторые входы с датчиками скоростного напора и высоты, устройства выбора минимального сигнала правого и левого сопла, первые входы которых соединены с выходами корректоров скоростного напора правого и левого сопел, вторые входы с выходами корректоров по высоте, а выходы со входами правого и левого электрогидравлических приводов, выходы которых соединены с поворотными соплами правого и левого двигателей.
На фиг. 1 - представлена блок-схема предлагаемой системы; на фиг. 2 - изображена структурная схема системы; на фиг. 3 - изображена схема расположения сопел.
Система содержит поворотные сопла правого и левого двигателей, оси вращения которых установлены под углом горизонтальной плоскости самолета 21, 22, вычислитель 1 продольного управления, вычислитель 2 путевого управления, электрогидравлические приводы 17 и 18 правого и левого сопла, электрические сумматоры 9 и 10 правого и левого сопла, датчики 3, углов атаки, датчики 19 и 20 скоростного напора и высоты, корректор 5 усиления по углу атаки, нелинейный усилитель 4 путевого канала, электронный усилитель 6, нелинейный усилитель 7 продольного канала, суммирующий усилитель 8, корректоры 13, 14 по высоте, корректоры 11, 12 по скоростному напору, устройство 15, 16 выбора минимального сигнала, электрогидравлические приводы 17, 18 правого и левого сопла. При этом выход вычислителя продольного управления 1 соединен с прямым входом электронного усилителя 6 и с первым входом корректора 5 усиления по углу атаки, вход которого соединен с выходом датчика 3 угла атаки, а выход с инвертирующим входом электронного усилителя 6 и с первым входом суммирующего усилителя 8. Выход электронного усилителя 6 соединен с входом нелинейного усилителя 7 продольного канала, выход которого соединен со вторым входом суммирующего усилителя 8. Выход вычислителя 2 путевого управления соединен с входом нелинейного усилителя 4 путевого канала, выход которого соединен со вторым прямым входом электрического сумматора 9 правого сопла и инвертирующим входом электрического сумматора 10 левого сопла, прямой вход которого соединен с выходом суммирующего усилителя 8. С этим же выходом соединен первый прямой вход электрического сумматора 9 правого сопла. Выходы электрических сумматоров 9 и 10 правого и левого сопел соединены с первыми входами корректоров 11 и 12 по скоростному напору правого и левого сопел и с первыми входами корректоров 13, 14 по высоте, вторые входы которых соответственно соединены с датчиками 19 и 20 скоростного напора и высоты. Выходы корректоров 13, 14 по скоростному напору и корректор по высоте соединен с входами устройств 15, 16 выбора минимального сигнала, выходы которых соединены с входами электрогидравлических приводов 17, 18 правого и левого сопла. Выходы электрогидравлических приводов соединены соответственно с правым и левым поворотным соплом, оси вращения которого установлены под углом к горизонтальной плоскости самолета.
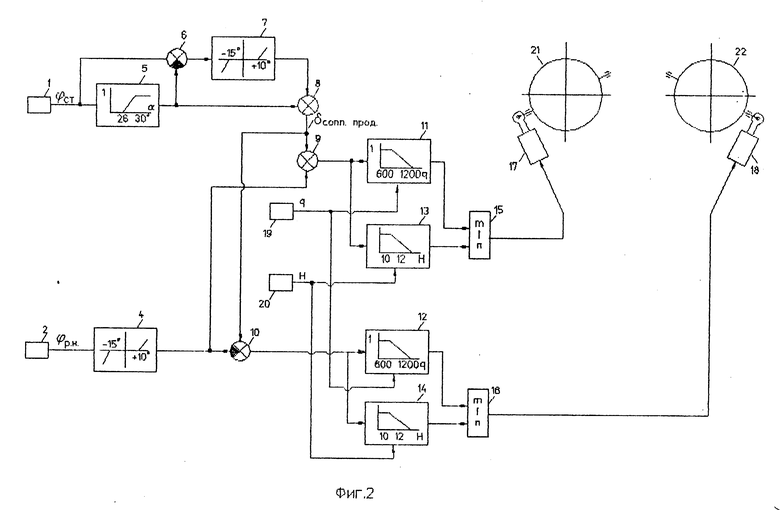
Рассмотрим структурную схему системы, представленной на фиг. 2.
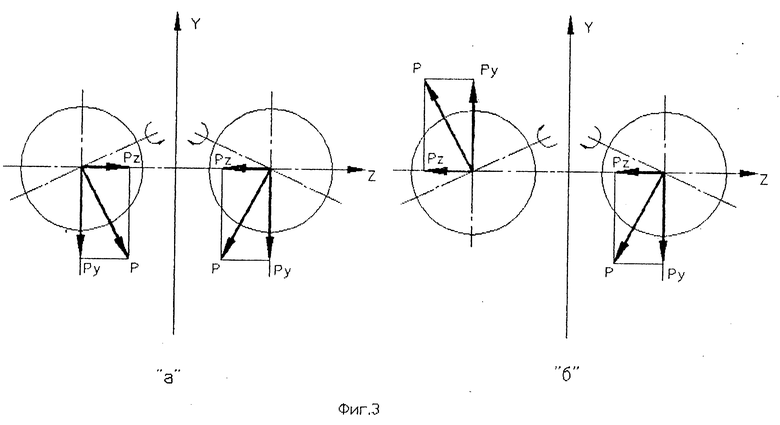
Заданные значения положения сопел δспр, δслев в виде электрических сигналов поступают на входы электрогидравлических приводов 17, 18, которые отклоняют сопла. Если δспр = δслев, то сопла отклоняются на один и тот же угол вверх или вниз (см. фиг. 3а). При этом проекция силы тяги каждого двигателя Р на ось У самолета создает продольный момент, обеспечивающий управление самолетом вокруг оси У
Mz = 2Psinδсcosϕ•xс,
где Р - сила тяги каждого двигателя;
δс - угол отклонения сопла;
ϕ - угол между осью поворота сопла и осью Z самолета;
Х - расстояние между соплом и центром тяжести самолета. Проекция сил на ось Z от обоих двигателей направлены в разные стороны и не создают момента вращающего самолет вокруг оси У. В случае если δспр = -δслев, сопла отклоняются в разные стороны (см. фиг. 3б). Проекции сил на ось У направлены в разные стороны и не создают продольного момента, а проекции сил тяги двигателей на ось Z самолета направлены в одну сторону и создают путевой момент, обеспечивающий управление самолетом вокруг оси У
My = 2Psinδсcosϕxс.
В общем случае при отклонении правого сопла на угол δспр, а левого на угол δслев создаются как продольный, так и путевой моменты
M = Psin(δспр + δслев)cosϕ•xc,
M = Psin(δспр - δслев)sinϕ•xc,
что обеспечивает одновременное управление самолетом, при помощи вектора тяги вокруг осей Z и У. Креновой момент, возникающий при управлении относительно оси У
Mx = Psin(δспр - δсл)cosϕ•L,
где L расстояние между двигателями, невелик из-за сравнительно малой величины L и парируется при необходимости моментов от отключения аэродинамических органов.
При создании момента рысканья максимальное уменьшение вектора тяги двигателей составляет
P = P(1-cosϕ),
учитывая, что угол поворота оси сопел ϕ = 30%, максимальное уменьшение тяги равно ≈ 13%. Уменьшение тяги в системе управления, где момент рысканья создается за счет изменения подачи топлива составляет 50%. (Один двигатель развивает максимальную тягу, тяга второго близка к первой).
Вычисление требуемых положений правого сопла δспр и левого сопла δслев происходит следующим образом. В вычислителе 1 продольного управления аэродинамическими поверхностями самолета определяется требуемое в данный момент положение стабилизатора. Этот сигнал ϕст поступает на электронный усилитель 6 и на корректор усиления по углу атаки.
При малых углах атаки (α < 26o) выход корректора усиления по углу атаки равен нулю при всех значениях сигнала ϕст, и сигнал с выхода электронного усилителя 6 также равен значению ϕст. Предельные значения ϕст составляют -20o (кабрирование) и +15o (пикирование). Если значения ϕст лежат в пределах (-15) - (+10)o, то сигнал на выходе нелинейного усилителя продольного канала равен 0, и сопла по сигналам вычислителя продольного управления не отклоняются. При углах атаки > 30 равен нулю сигнал с электронного усилителя 6, а сопла отклоняются пропорционально сигналам продольного управления, так как именно этот сигнал будет на выходе корректора усиления по углу атаки и, следовательно, на выходе суммирующего усилителя 8, сигнал которого δспрод проходит на прямые входы электрических сумматоров и соответствует отклонению сопла для создания продольного момента.
Сигнал ϕр.н с вычислителя 2 путевого управления, равный отклонению рулей направдения, поступает на нелинейный усилитель путевого канала, выход которого равен нулю, если руль направления не достиг своих предельных значений ± 25o. В этом случае дифференциальное отклонение сопел также равно нулю. Таким образом, сопла отклоняются только в случаях, когда аэродинамические поверхности исчерпали свои возможности (сигнал требуемого отклонения стабилизаторов выходит за пределы (-15) - (+10)o, а сигнал требуемого отклонения руля направления более (25o), вследствие чего количество перемещений сопла в процессе управления резко уменьшается и ресурс сопла в летных часах значительно повышается.
Корректоры по высоте 13, 14 и скоростному напору 11, 12 и устройства выбора минимального сигнала 15, 16 обеспечивают то, что сопла не отклоняются на скоростных напорах более 1200 кг/м и на высотах более 12 км. Первое условие связано с тем, что сопла на больших скоростных напорах имеют малую по сравнению с аэродинамическими поверхностями эффективность, а второе с тем, что створки сопел при отклонениях на больших высотах перегреваются из-за малой теплоотдачи.
Таким образом, поставленная задача решается тем, что сигналы для управления соплами формируются таким образом, что сопла отклоняются только тогда, когда стабилизаторы и рули направления находятся в положениях, близких к предельным (исчерпали свои возможности) или тогда, когда самолет находится на больших углах атаки, причем отклонения сопел происходит только в ограниченном диапазоне скоростных напоров и высот; оси вращения сопел расположены под наклоном к горизонтальной плоскости самолета, благодаря чему при их дифференциальном отклонении создается момент рысканья.
Таким образом, введение корректоров по скоростному напору и высоте и устройств выбора минимального сигнала также резко повышает надежность работы системы и его ресурс.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МАРШЕВЫХ ДВИГАТЕЛЕЙ САМОЛЕТА | 1998 |
|
RU2122510C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 1998 |
|
RU2128127C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУХОЗАБОРНИКОМ ДВИГАТЕЛЯ САМОЛЕТА | 1997 |
|
RU2131051C1 |
| ВОЗДУХОЗАБОРНИК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2140378C1 |
| СПОСОБ ОБУЧЕНИЯ УПРАВЛЕНИЮ ТРАНСПОРТНЫМ СРЕДСТВОМ И ТРЕНАЖЕР | 1995 |
|
RU2131623C1 |
Изобретение относится к системам управления самолетов. Система содержит поворотные сопла двигателей, с которыми соединены функциональные блоки, связанные последовательно между собой. Имеются вычислители продольного и путевого управления, датчики углов атаки, скоростного напора и высоты, корректор усиления по углу атаки, усилители продольного и путевого каналов и др. В систему введены корректоры по скоростному напору и высоте, а также устройства выбора минимального сигнала, что повышает ее надежность. Отклонение сопел происходит в ограниченном диапазоне скоростных напоров и высот, что повышает ресурс сопел. 3 ил.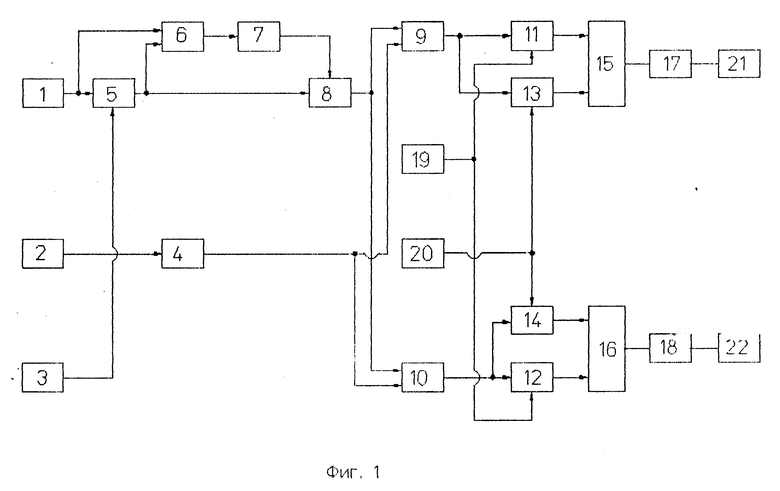
Система управления двухдвигательного самолета посредством управления вектором тяги двигателей, содержащая вычислители продольного и путевого управления аэродинамическими поверхностями, электрогидравлические приводы правого и левого сопла, датчики углов атаки, скоростного напора и высоты, отличающаяся тем, что в нее дополнительно введены поворотные сопла, оси вращения которых расположены под углом к горизонтальной плоскости самолета, корректор усиления по углу атаки, первый вход которого соединен с выходом вычислителя продольного управления аэродинамическими поверхностями, а второй вход с выходом датчика угла атаки, электронный усилитель, прямой вход которого соединен с выходом вычислителя продольного управления аэродинамическими поверхностями, а инвертирующий вход с выходом корректора усиления по углу атаки, нелинейный усилитель продольного канала управления, вход которого соединен с выходом электронного усилителя, суммирующий усилитель, первый вход которого соединен с выходом корректора по углу атаки, а второй вход с выходом нелинейного усилителя продольного канала управления, а выход с прямыми входами электрических сумматоров правого и левого сопла, нелинейный усилитель путевого канала, вход которого соединен с выходом вычислителя путевого управления аэродинамическими поверхностями, а выход со вторым прямым входом электрического сумматора правого сопла и инвертирующим входом электрического сумматора левого сопла, корректор по скоростному напору и корректор по высоте правого сопла, корректор по скоростному напору и корректор по высоте левого сопла, первые входы которых соединены соответственно с выходами электрических сумматоров правого и левого сопла, а вторые входы с датчиками скоростного напора и высоты, устройства выбора минимального сигнала правого и левого сопла, первые входы которых соединены с выходами корректоров скоростного напора правого и левого сопел, вторые входы с выходами корректоров по высоте, а выходы со входами правого и левого электрогидравлических приводов, выходы которых соединены с поворотными соплами правого и левого двигателей.
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| DE 3909347 A1, 27.09.80 | |||
| DE 3609457 A1, 25.09.86 | |||
| Обмотка электрической машины или аппарата | 1982 |
|
SU1095315A1 |
| DE 3643823 A1, 30.06.88 | |||
| СПОСОБ РАЗВИТИЯ СОЗНАНИЯ У УЧАЩИХСЯ ВНЕШКОЛЬНОГО ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ | 2011 |
|
RU2474439C1 |
| US 3515361 A, 02.06.70 | |||
| DE 3244050 A1, 05.07.84 | |||
| US 3446460 A, 27.05.69. | |||

