Изобретение относится к области геодезического приборостроения и, в частности, предназначается для производства разбивочных и съемочных работ, выполняемых при монтаже сборных строительных конструкций, расположенных в наклонной плоскости, и при планировочных работах значительных площадей.
Известно устройство, основанное на принципе развертки падающего на отражающий элемент лазерного луча, содержащее лазер и коллиматор, помещенные в цилиндрическую обойму, в верхней части которой расположен электродвигатель, имеющий полый вал, через который проходит лазерный пучок, а на торце вала укреплен оптический отражательный элемент (авторское свидетельство СССР N 280363, кл. G 01 C 9/06, Бюллетень изобретений N 27, 1979) [1] .
Недостатком известного устройства является то, что в нем при наклоне корпуса прибора меняются пространственные координаты оптического центра пентапризмы, т. е. точки, с которой берет начало исходящий луч лазера. Это усложняет разбивочные работы, т. к. постоянно возникает необходимость вносить поправки в исходные данные с учетом реального местоположения точки - "оптический центр" пентапризмы. Это ведет к увеличению трудовых затрат и к потере точности. Кроме того, известное устройство может работать в ограниченном диапазоне углов наклона задаваемых плоскостей, что обусловлено реальными размерами подъемных винтов геоинструмента, задействованного в операции наклона.
Цель изобретения - повышение производительности труда, точности результатов построения и расширение углового диапазона задаваемых наклонных плоскостей.
Указанный результат достигается тем, что в приборе для задания лазерной опорной плоскости, содержащим опорный элемент, установленную на нем цилиндрическую обойму, в которой размещен лазер, коллиматор, электродвигатель и соединенная с его полным валом пентапризма; опорный элемент содержит основание и две боковые подставки, причем, на основании выполнены вертикальные круговые направляющие; на конце цилиндрической обоймы, противоположному креплению пентапризмы, размещен ролик с возможностью перекатывания по вертикальным круговым направляющим, а поверхность цилиндрической обоймы выполнена с выступом и неподвижными направляющими, введены пружина, первая и вторая каретки, которые размещены на поверхности цилиндрической обоймы; каретки с возможностью перекатывания в неподвижных направляющих, а пружина - с возможностью упора о выступ и первую каретку, первая и вторая пары поворотных рычагов, которые одним своим концом закреплены с возможностью вращения на боковых подставках, а вторым концом шарнирно: первая пара - с первой кареткой, вторая - со второй кареткой, а длины поворотных рычагов равны расстоянию от центра пентапризмы до оси вращения каждого из них, две секторные шестерни, которые размещены на валах осей вращения первой и второй пары поворотных рычагов, червяк, который укреплен на боковой подставке с возможностью взаимодействовать с обеими шестернями, и вертикальный круг, установленный на оси вращения одной из шестерен.
Введением в прибор поворотных рычагов обеспечивается отклонение от отвесного положения оси цилиндрической обоймы на наружную величину, а лучу лазера, что проходит по оси обоймы, после его развертки пентапизмой уже можно описывать заданную наклонную плоскость.
Принятием длин рычагов, равных расстоянием от оптического центра пентапризмы до оси вращения этих рычагов, обеспечивается, в случая одновременного отклонения обеих рычагов от отвесного положения на одинаковый угол, получение прямой, которая всегда будет проходить через три точки: оптический центр пентапризмы, а также точки соединения с цилиндрической обоймой верхнего и нижнего рычагов. В этом случае отклонение обоих поворотных рычагов на угол β обеспечивает отклонение от отвесного положения прямой, что проходит через три основные точки, на угол α, равный половине угла β, т. е. β = α. В предложенном решении в качестве такой прямой, которая (что проходит через упомянутые 3 точки) выступает, является ось цилиндрической обоймы, а значит и луч лазера до его развертки пентапризмой
Ввод секторов шестерен, а также червяка позволяет совершать одновременный поворот обеих рычагов в нужную сторону, притом на угол одинаковой величины, который может учитываться на вертикальном круге. Использование вертикальных круговых направляющих, а также подпружинивание цилиндрической обоймы позволяет сохранять пространственные координаты точки оптический центр пентапризмы. В данном случае цилиндрическая обойма подобно маятнику качается вокруг точки, оптического центра пентапризмы. Длина "маятника", т. е. обоймы, постоянна. Перекатывание ролика с цилиндрической обоймой по направляющим имитирует прочерчивание дуги известным радиусом с точки - оптический центр пентапризмы.
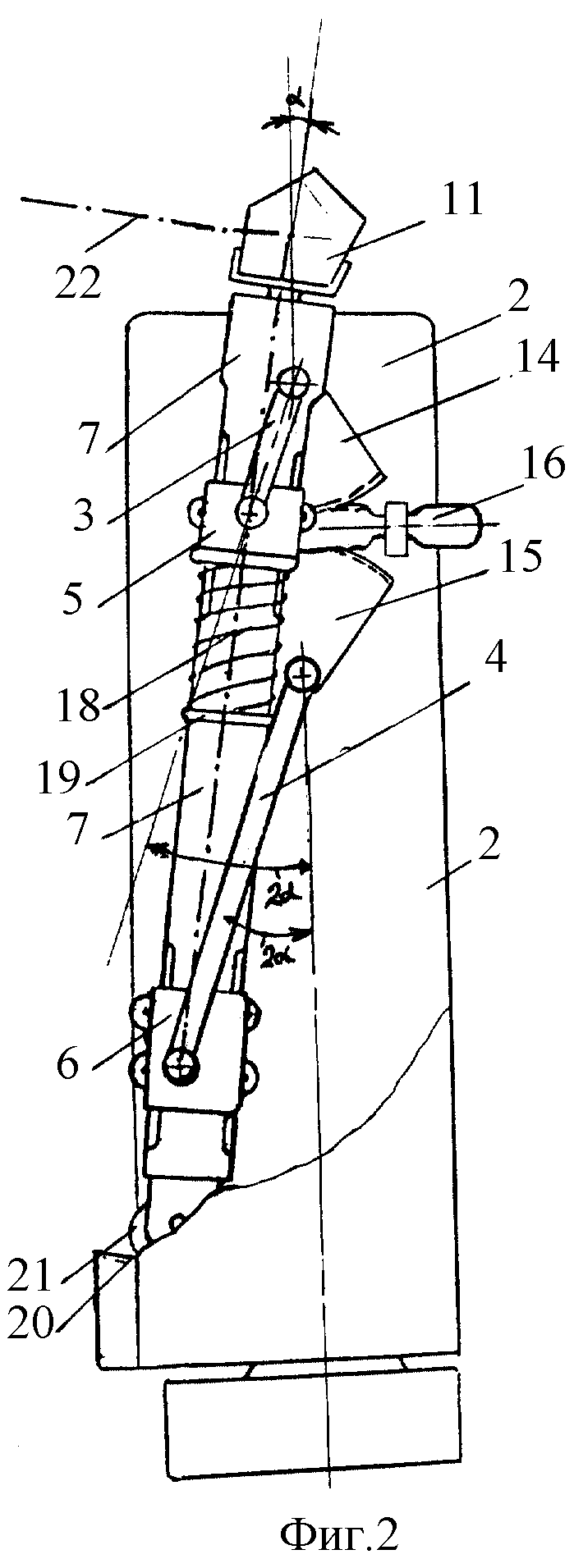
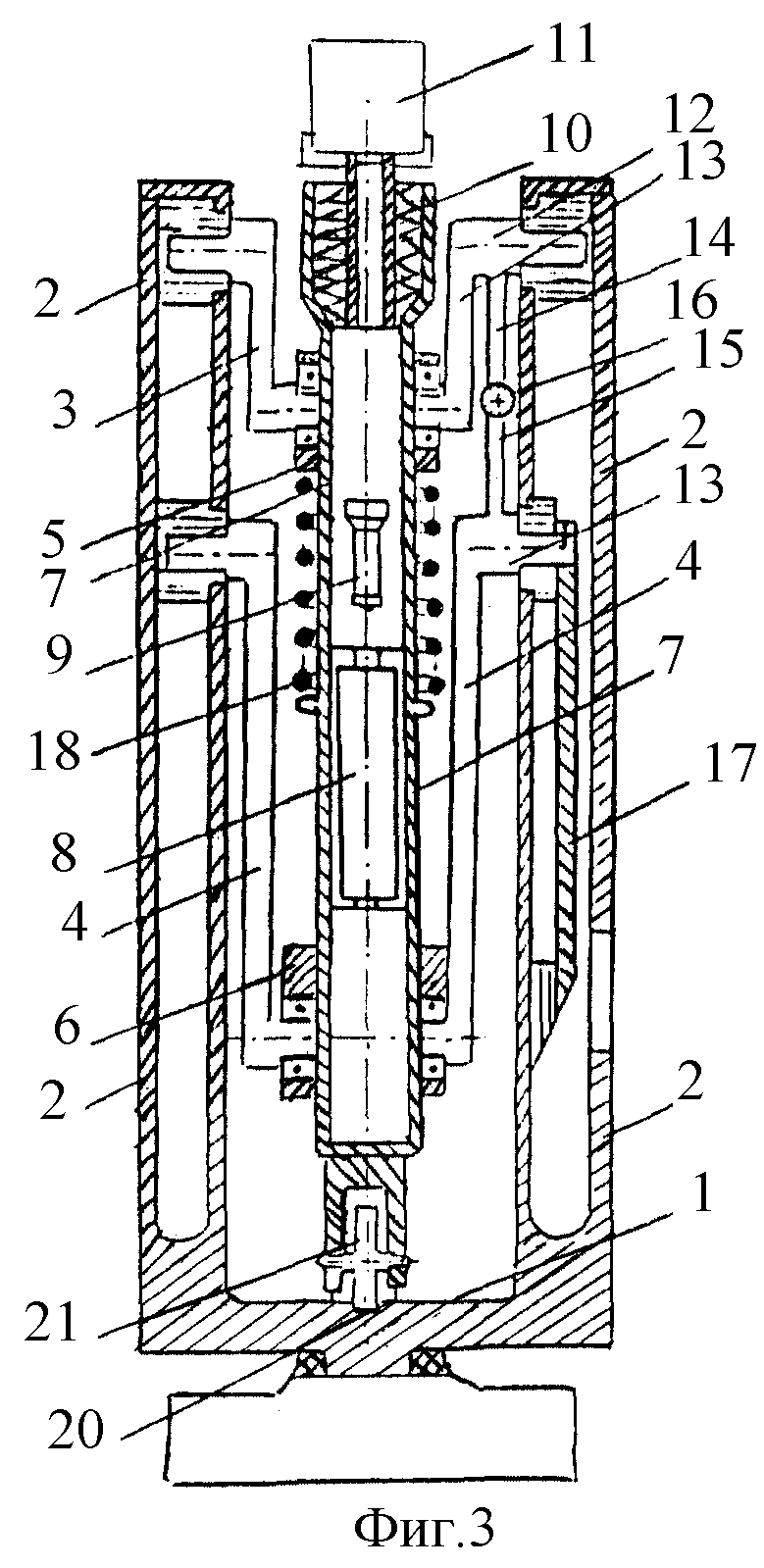
На фигуре 1 изображено в аксонометрии предлагаемое устройство, общий вид; на фигуре 2 - то же, вид сбоку; на фигуре 3 показан поперечный разрез; на фигуре 4 представлен поясняющий чертеж.
Устройство включает опорный элемент с основанием 1 и двумя боковыми подставками 2; первую 3 и вторую 4 пары поворотных рычагов, закрепленных одним своим концом на подставках 2 с возможностью вращения, а вторым своим концом шарнирно: первая пара рычагов 3 - с первой кареткой 5, вторая пара 4 - со второй кареткой 6; цилиндрическую обойму, в которой размещен лазер 8, коллиматор 9, электродвигатель 10, а также соединения с его полым валом пентапризма 11. На валах 12 и 13 осей вращения поворотных рычагов 3 и 4 жестко закреплены секторные шестерни 14 и 15, а на подставке 2 размещен червяк 16, имеющий возможность взаимодействовать с шестернями 14 и 15. На валу оси вращения шестерни 15 и поворотного рычага 4 установлен вертикальный круг 17. Имеется пружина 18, что размещена на поверхности цилиндрической обоймы 7, одним своим концом она упирается о выступ 19, а вторым в первую каретку 5; а также вертикальные круговые направляющие 20, на основании 1. Ролик 21 размешен на нижнем конце цилиндрической обоймы с возможностью перекатывания по вертикальным круговым направляющим 20.
При производстве работ прибор, закрепленный на штативе, размещают над точкой геодезического обоснования. Ориентируют инструмент по азимуту линии максимального уклона, выносимой в натуру плоскости. Ориентируясь по вертикальному кругу 17, вращением червяка 16 придают требуемый наклон оси вращения пентапризмы 11. Эта ось совмещена с осью цилиндрической обоймы 7.
Развертываемый пентапризмой 11 луч лазера 22 будет описывать в пространстве заданную проектную плоскость. В любой точке на поверхности площадки ее легко зафиксировать. Например, если прибор установлен над точкой, поверхность которой уже имеет проектную отметку, то для передачи этой проектной плоскости в любую точку площадки достаточно будет выставить там штырь, чтобы расстояние от лазерной плоскости до штыря равнялось высоте инструмента на стоянке.
Пример конкретного выполнения предложенного устройства.
Примем длины поворотных рычагов величиной: первый в 50 мм (верхний) и второй 150 мм (нижний). Тогда оси вращения поворотных рычагов будут отстоять от оптического центра пентапризмы тоже на удалении 50 и 150 мм. Предположим, что секторы - шестерни имеют диаметр 90 мм, а модуль выполненной резьбы равен 0,3, тогда число зубьев составит 300.
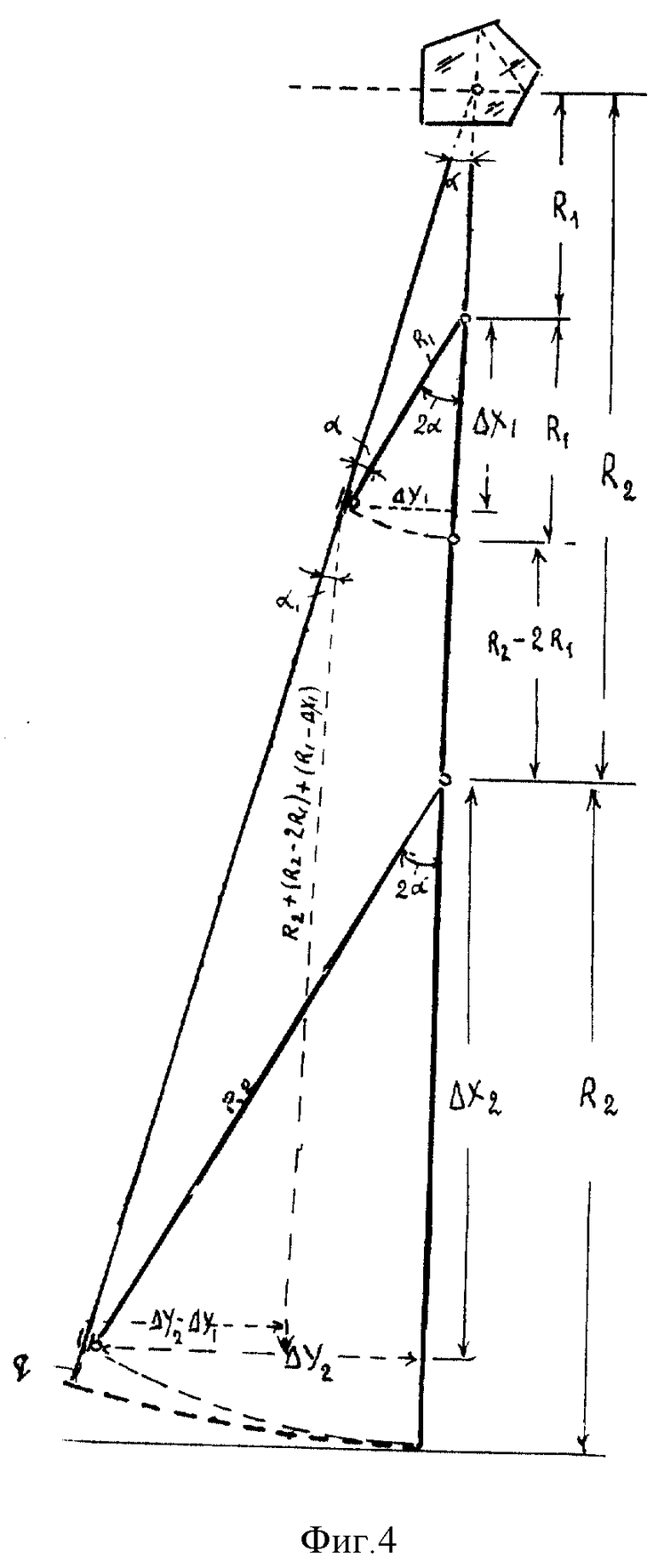
Пусть требуется построить лазерную плоскость с наклоном в 15o. Вращением червяка 16 на 25 оборотов добиваемся поворота рычагов (отклонение их от отвесного положения) на 30o. Точно эта величина будет зафиксирована на вертикальном круге 17.
В результате такого вращения рычагов ось цилиндрической обоймы 7, через которую походит луч лазера до его развертки, отклонится от вертикали на 15o, т. е. на требуемый угол. Это видно из следующего (смотри поясняющий чертеж, фигура 4).
При угле 2 α = 30o имеем:
Тогда
откуда arctg = 15o, 00/
Контроль.

Откуда arctg = 15o, 00.
При повороте рычагов пружина будет прижимать цилиндрическую обойму к поверхности вертикальной круговой направляющей, постоянно сдвигая ее на величину q, а поэтому точка "оптический центр" пентапризмы не сдвигается с места, т. е. ее пространственные координаты на станции не изменятся. Объясняется это тем, что длины отрезков от оптического центра пентапризмы до нижней черты ролика, а также - от той же точки до поверхности направляющей - равны между собой.
Предложенное решение лазерного прибора для задания наклонных плоскостей выгодно отличается от известных аналогов тем, что работает в широком диапазоне углов наклона, что крайне важно для работы на строительной площадке.
У известного аналога (прототип), где величина наклона создаваемой лазерной наклонной плоскости регулируется подъемными винтами, из-за реальной величины самих подъемных винтов нельзя достичь наклона больше 6o, что видно из следующего. При расстоянии между центрами подъемных винтов в 100 мм и шагом резьбы на них в 0,75 мм (таковы у отечественных теодолитов) поворот подъемного винта на два оборота обеспечит наклон плоскости трегера на 59', 54, тогда за 12 оборотов (максимально возможных) винта наклон может достичь только 5o56'.
В предложенном инструменте точка, с которой посылается развертываемый луч лазера, т. е. оптический центр пентапризмы, постоянно остается на одном месте, не меняет своих пространственных координат. Такой прибор, будучи установлен на центрирующем штативе с постоянной высотой, например, зарегистрированному по авт. свидетельству СССР N 2087792, кл. G 01 С 15/02, бюл. изобретен. N 23, 1997, позволяет быстро и, что особенно важно, точно выносить в натуру проектные точки, не делая поправок за смещения в плане и по высоте.
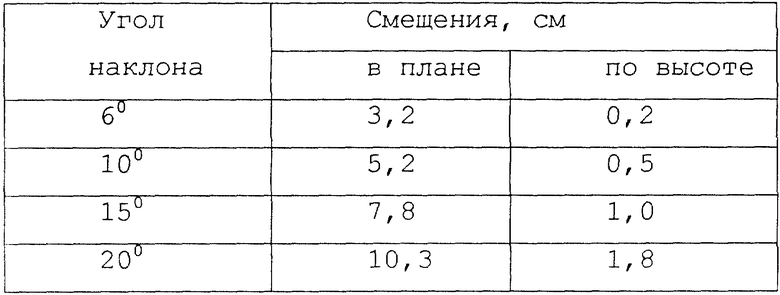
У известного аналога при наклоне корпуса изменяются пространственные координаты точки "оптический центр пентапризмы", т. е. той точки, с которой посылается луч лазера. Величина смещений определяется углом наклона и расстоянием между точками: центр сферы и оптический центр пентапризмы. Для расчетов примем, например, названное расстояние в 30 см, тогда величина смещений составит (см. таблицу).
Приведенные данные говорят о том, что при построении наклонных плоскостей и особенно при монтаже технологического оборудования в наклонных плоскостях, нельзя добиться таким инструментом точности без внесения поправок, т. е. в готовом виде прибор не обеспечивает нужную точность, а внесение поправок требует затрат труда, времени и знаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 2001 |
|
RU2187786C1 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 2002 |
|
RU2230292C1 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 1998 |
|
RU2160429C2 |
| ПРИБОР ДЛЯ ЗАДАНИЯ ЛАЗЕРНОЙ ОПОРНОЙ ПЛОСКОСТИ | 2004 |
|
RU2266520C2 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 1999 |
|
RU2171448C2 |
| ЦЕНТРИРУЮЩИЙ ШТАТИВ | 2001 |
|
RU2184935C1 |
| МАРКА К ВИЗИРНОМУ УСТРОЙСТВУ | 2000 |
|
RU2175112C1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 2003 |
|
RU2244255C2 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2092898C1 |
| ПРИБОР ДЛЯ ЗАДАНИЯ ЛАЗЕРНОЙ ОПОРНОЙ ПЛОСКОСТИ | 2006 |
|
RU2347188C2 |
Изобретение относится к геодезическому приборостроению и предназначено для производства разбивочных работ при монтаже сборных строительных конструкций и при планировочных работах значительных площадей. Прибор содержит две пары поворотных рычагов, две секторные шестерни, вертикальный круг, червяк, опорный элемент, на котором установлена цилиндрическая обойма с лазером, коллиматором, электродвигателем и пентапризмой. Опорный элемент содержит основание с вертикальными неподвижными направляющими и две боковые подставки. Цилиндрическая обойма выполнена с выступом и неподвижными направляющими. На поверхности цилиндрической обоймы размещены две каретки с возможностью перекатывания в неподвижных направляющих и пружина, которая упирается в выступ и первую каретку. На конце цилиндрической обоймы размещен ролик с возможностью перекатывания по вертикальным круговым направляющим. Две пары поворотных рычагов одним концом закреплены с возможностью вращения на боковых подставках, другим - шарнирно с соответствующими каретками. Длины поворотных рычагов равны расстоянию от центра пентапризмы до осей вращения каждого из них. Секторные шестерни размещены на валах вращения первой и второй пар поворотных рычагов. Червяк укреплен на боковой подставке с возможностью взаимодействия с обеими шестернями. Вертикальный круг установлен на оси вращения одной из шестерен. Технический результат состоит в повышении производительности труда, точности результатов построения и расширении углового диапазона задаваемых наклонных плоскостей. 4 ил. , 1 табл.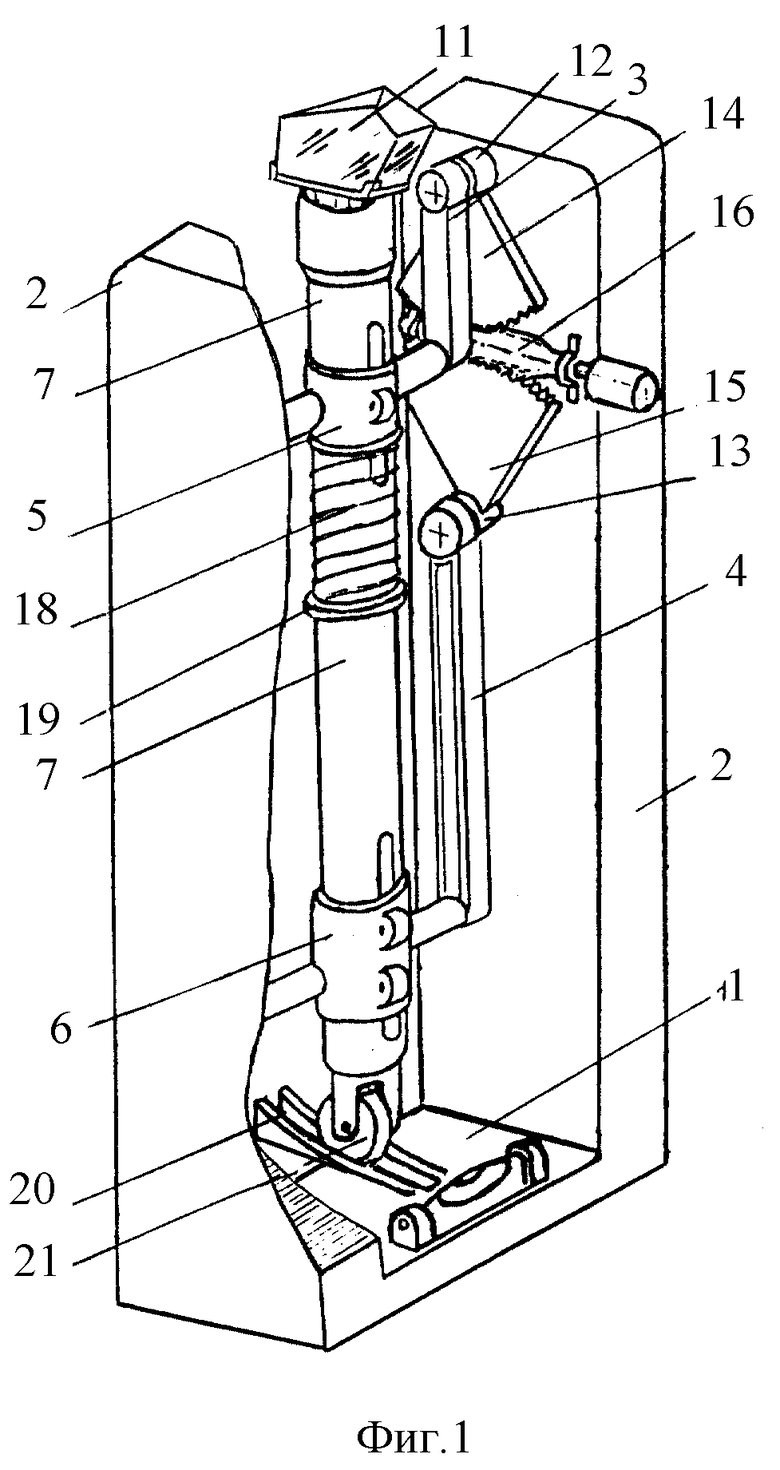
Прибор для задания лазерной опорной плоскости, содержащий опорный элемент, установленную на нем цилиндрическую обойму, в которой размещены лазер, коллиматор, электродвигатель и соединенную с его полым валом пентапризму, отличающийся тем, что опорный элемент содержит основание и две боковые подставки, причем на основании выполнены вертикальные круговые направляющие, на конце цилиндрической обоймы, противоположном креплению пентапризмы, размещен ролик с возможностью перекатывания по вертикальным круговым направляющим, а поверхность цилиндрической обоймы выполнена с выступом и неподвижными направляющими; введены пружина, первая и вторая каретки, которые размещены на поверхности цилиндрической обоймы: каретки с возможностью перекатывания в неподвижных направляющих, а пружина - с возможностью упора в выступ и первую каретку, первая и вторая пары поворотных рычагов, которые одним своим концом закреплены с возможностью вращения на боковых подставках, а вторым концом шарнирно: первая пара - с первой кареткой, вторая - со второй кареткой, а длины поворотных рычагов равны расстоянию от центра пентапризмы до оси вращения каждой из них, две секторные шестерни, которые размещены на валах осей вращения первой и второй пар поворотных рычагов, червяк, который укреплен на боковой подставке с возможностью взаимодействия с обеими шестернями, и вертикальный круг, установленный на оси вращения одной из шестерен.
| ПРИБОР ДЛЯ СОЗДАНИЯ ИСХОДНОЙ ГЕОДЕЗИЧЕСКОЙЛИНИИ ИЛИ плоскости | 0 |
|
SU280363A1 |
| Лазерный указатель направления | 1988 |
|
SU1545080A1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ СВЕТОВОЙ ПЛОСКОСТИ И УЗЕЛ РАЗВЕРТКИ ЛАЗЕРНОГО ПУЧКА СВЕТА В ПЛОСКОСТЬ | 1995 |
|
RU2089853C1 |
| DE 3601179 A1, 23.07.1987 | |||
| ВСЕСОЮЗНАЯ | 0 |
|
SU366150A1 |
| Контактный узел | 1981 |
|
SU1001250A1 |
