Изобретение относится к области общего машиностроения, предназначено для передачи вращения от одного вала к другому как с постоянным, так и с плавно изменяющимся передаточным отношением, и может быть использовано в приводах машин и механизмов самого широкого назначения.
Известен механизм муфты свободного хода с аксиальным смещением заклинивающихся шариков (см. Кожевников С.Н. и др. Механизмы. М., "Машиностроение", 1976 г., стр. 414-417). Механизм представляет собой полумуфту, жестко закрепленную на ведущем валу и выполненную с клиньями по внешней окружности. Между клиньями полумуфты и торцовыми канавками двух дисков ведомой части расположены шарики, которые заклиниваются при вращении ведущего вала в одну сторону и свободно вращаются при его вращении в противоположном направлении. Этот механизм передает вращательное движение без изменения скорости и только в одном направлении.
Известен фрикционно-планетарный механизм Кузнецова с косой шайбой (см. Артоболевский И. И, Механизмы в современной технике. Т.5, М., "Наука", 1981 г. , стр. 324), который является бесступенчатой передачей. Механизм содержит входной вал, соединенный с кривошипом. Движение от кривошипа передается к косой шайбе с помощью тела качения - ролика, который прижимает косую шайбу к неподвижной конической поверхности, сообщая шайбе сложное пространственное качающееся движение. От шайбы через кулису с ползуном движение передается вилке, закрепленной на ведомом валу. Перемещением вилки вдоль вала можно изменять высоту ползуна и изменять число оборотов в минуту ведомого вала. Этот механизм имеет очень сложную конструкцию, и, как следствие, низкую надежность. Наличие нескольких передаточных звеньев, особенно пары трения кулиса- ползун, резко снижает кпд механизма. У передачи ограничена передаваемая мощность, т.к. в ней не решена проблема создания прижимного усилия тела качения к косой шайбе и его регулировки по мере износа. Данное устройство, имеющее наибольшее количество признаков с первым объектом изобретения, принимаем за прототип для фрикционно-планетарного механизма.
Известен фрикционный механизм лобовой бесступенчатой передачи с двумя дисками (см. Артоболевский И.И. Механизмы в современной технике. Т. 5, М., "Наука", 1981 г. , стр. 314). Оси входного и выходного валов этой передачи смещены друг относительно друга. На обоих валах посажены фрикционные лобовые диски, между которыми расположено тело качения - ролик, вращающийся вокруг собственной оси и имеющий возможность перемещения вдоль этой оси. Передаточное отношение определяется отношением расстояний от осей вращения дисков до точек соприкосновения ролика с дисками. При кажущейся простоте конструкции такие передачи имеют множество ограничений. Механизм состоит из двух передаточных звеньев: от диска к телу качения и от тела качения к диску и оба звена - фрикционные передачи. Поэтому такой механизм обладает недостатками, присущими всем фрикционным передачам. Во-первых, это необходимость создавать высокие прижимные усилия деталей друг к другу, особенно при передаче больших мощностей. Это требует создания дополнительных прижимных механизмов с регулируемым усилием при износе трущихся деталей, что приводит к созданию громоздких конструкций, к большим давлениям на опоры и большим потерям энергии на трение в опорах (см. Боков В.Н. Детали машин. М., "Высшая школа", 1994 г., с. 177-178). Наличие проскальзывания при перегрузках ограничивает сферу использования передачи. Данное устройство принимаем за прототип для бесступенчатой передачи.
Таким образом, задачей изобретения является создание простого, надежного и передающего высокие мощности механизма с плавным изменением передаточного отношения. При этом один из узлов этого механизма, а именно фрикционно-планетарный механизм, может использоваться как самостоятельная передача высокой мощности с постоянным передаточным числом. Технический результат, достигаемый изобретением, состоит в том, что у фрикционно-планетарного механизма с косой шайбой автоматически появляется и регулируется прижимное усилие для тела качения, что повышает мощность и кпд механизма и бесступенчатой передачи в целом. Техническим результатом для бесступенчатой передачи является также расширение арсенала средств, преобразующих движение с плавно регулируемым передаточным отношением.
Для решения поставленной задачи фрикционно-планетарный механизм с косой шайбой, как и прототип, содержит входной вал, тело качения, взаимодействующее с косой качающейся шайбой, снабженной устройством ее фиксации от вращения. Косая качающаяся шайба имеет связь с выходным валом. В отличие от прототипа на входном валу закреплен лобовой фрикционный диск, взаимодействующий с телом качения, а косая шайба связана с выходным валом через подшипник и торцовый кулачок.
Этот механизм имеет простую конструкцию и высокую передаточную мощность, обусловленную практическим отсутствием проскальз ывания тела качения. Действительно, в этом механизме прижимное усилие тела качения к фрикционному диску создается автоматически за счет торцового кулачка. Передаточное отношение механизма u = n1/n2 постоянно и равно 2.
При необходимости возможно конструирование по такому принципу передаточного механизма с иным передаточным отношением. Для этого на лобовом фрикционном диске и на поверхности качающейся шайбы выполнены дорожки качения такого профиля, что зоны контакта тела качения с дорожками качения расположены на разных расстояниях от оси вращения тела качения.
Для тела качения, выполненного в виде шарика, для выполнения вышеупомянутого условия, по меньшей мере, одна из дорожек качения должна иметь две зоны контакта с телом качения - шариком.
Тело качения может быть выполнено в виде ступенчатого ролика, при этом ролик контактирует с дорожками качения на лобовом фрикционном диске и на косой качающейся шайбе поверхностями ступеней, имеющих разный диаметр.
Если в механизме с телом качения - шариком внешнюю кольцевую часть с дорожкой качения, по меньшей мере, одной из взаимодействующих деталей: лобового фрикционного диска или косой качающейся шайбы, выполнить упруго подвижной относительно самой детали, то у устройства появляется новое качество. При резком повышении нагрузки в механизме автоматически будет несколько изменяться передаточное отношение, т.е. механизм будет стойким к перегрузкам.
Того же результата можно добиться и иным путем. Для этого лобовой фрикционный диск посажен на входной вал с возможностью осевого перемещения, ограниченного упругим элементом. Дорожка качения на лобовом фрикционном диске имеет две зоны контакта с телом качения, выполненные на отдельных кольцевых элементах, поджатых друг к другу с помощью упругих вставок и соединенных с лобовым фрикционным диском с возможностью сдвига в радиальном направлении посредством муфты Ольдгема или параллельного кривошипа.
На основе вышеописанного фрикционно-планетарного механизма возможно создание бесступенчатой передачи. Такая передача, как и прототип, содержит передаточный механизм с входным и выходным валами, с двумя дисками на них и с телом качения между дисками, а также узел плавного изменения скорости вращения выходного вала, путем изменения расстояния от оси вращения входного лобового фрикционного диска до точки контакта тела качения с ним. В отличие от прототипа, передаточный механизм выполнен в виде фрикционно-планетарного механизма с косой шайбой по п.1, в котором лобовой фрикционный диск соединен с входным валом посредством механизма привода между параллельными осями, допускающего изменение расстояния между осями. Кроме того, фрикционный диск снабжен узлом, позволяющим диску совершать сателлитно-планетарное движение относительно оси входного и выходного валов. На косой качающейся шайбе выполнена дорожка для удержания тела качения. Узел плавного изменения скорости выполнен в виде устройства, сдвигающего ось вращения фрикционного диска относительно оси входного и выходного валов в радиальном направлении.
Механизм привода между параллельными осями, узел сателлитно-планетарного движения лобового фрикционного диска и устройство сдвига оси вращения фрикционного диска в радиальном направлении могут быть выполнены в различных вариантах конкретного исполнения.
Механизм привода между параллельными осями может быть выполнен в виде карданной передачи, либо в виде муфты Ольдгема.
Узел сателлитно-планетарного движения лобового фрикционного диска содержит закрепленный в корпусе наружный подшипник, с внутренней обоймой которого с возможностью перемещения вдоль радиуса связан внутренний подшипник, в котором закреплен вал лобового фрикционного диска.
Устройство сдвига оси вращения лобового фрикционного диска в радиальном направлении разработано в двух вариантах. По первому варианту оно выполнено в виде, по меньшей мере, одного гидро - или пневмоцилиндра, корпус и поршень которого прикреплены к внешнему и внутреннему подшипникам. По второму варианту устройство содержит два параллельных соосных диска, закрепленных во внешнем подшипниковом узле с возможностью поворота их друг относительно друга. Каждый диск выполнен с наклонной к радиусу прорезью, причем наклон прорезей в одном диске противоположен к наклону прорези в другом диске, так что прорези пересекаются. В точке пересечения прорезей помещен внутренний подшипник планетарного механизма,
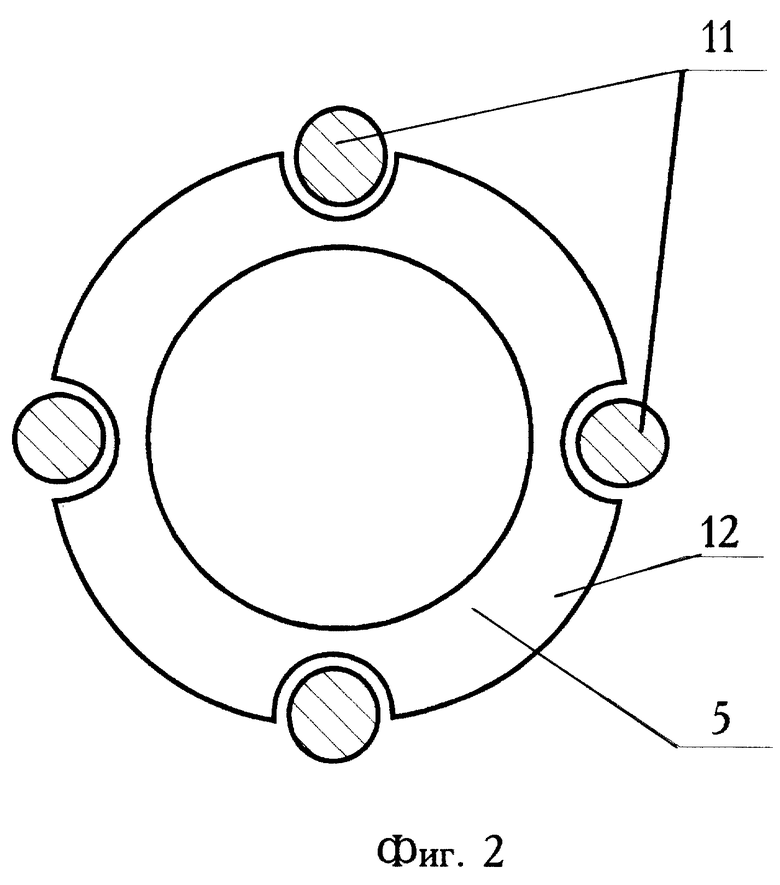
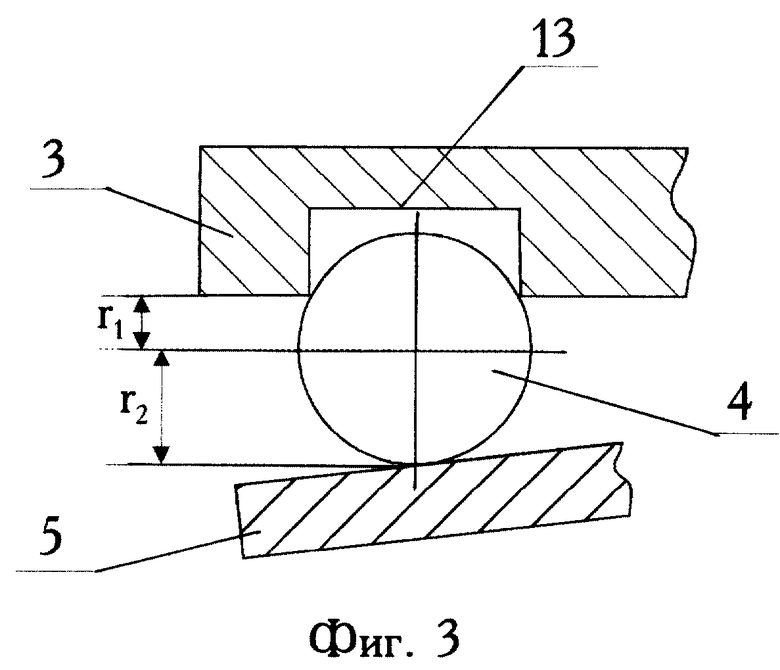
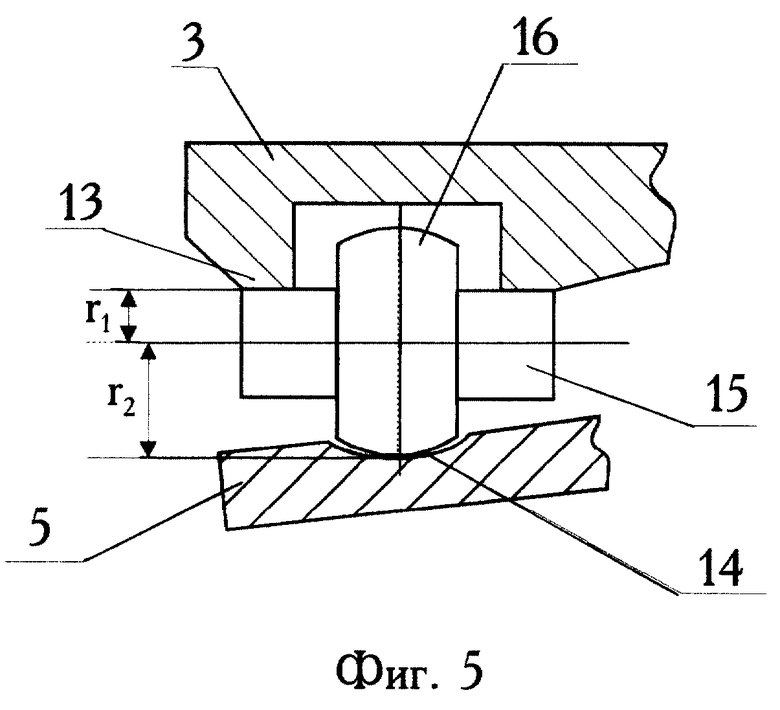
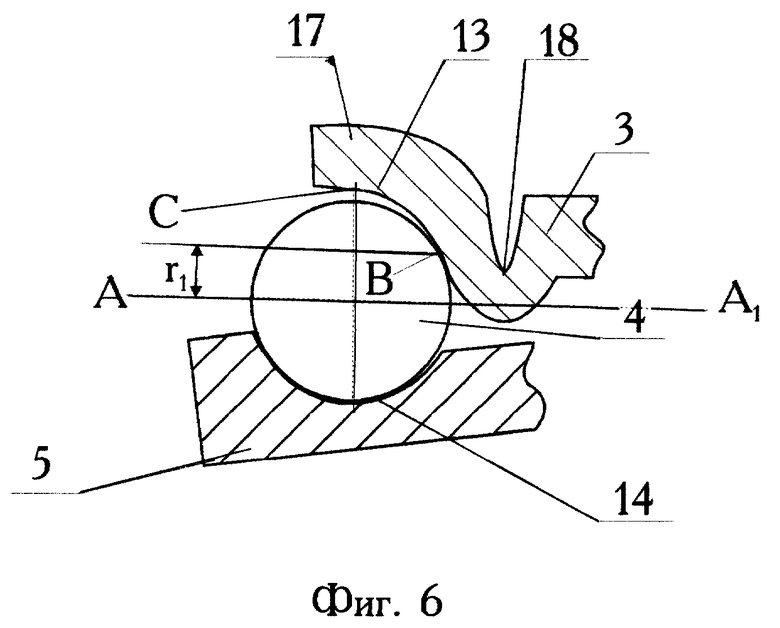
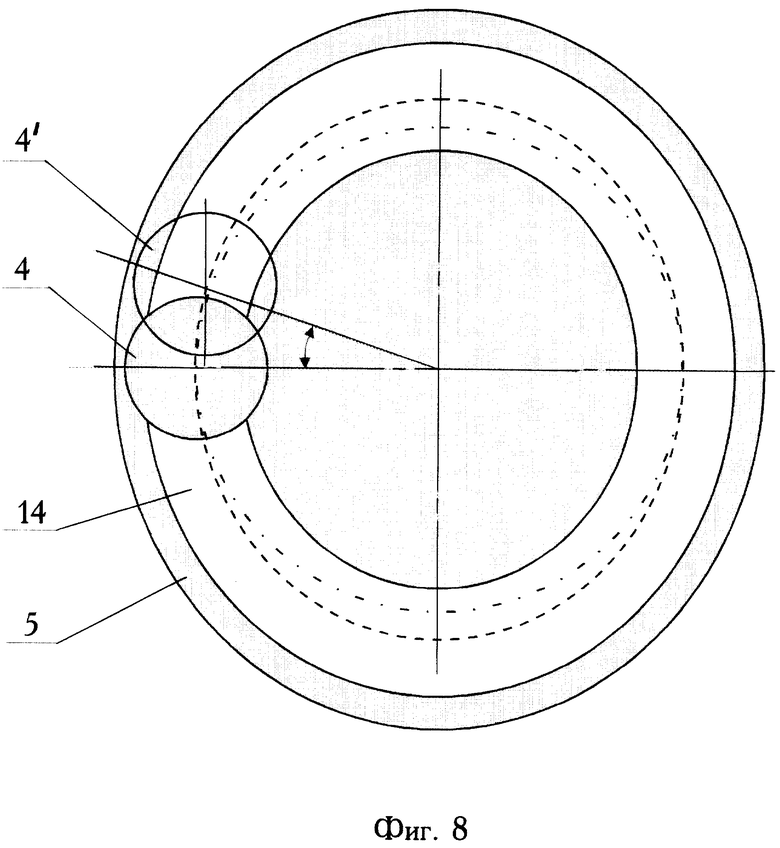
Изобретения иллюстрируются графическими материалами, На фиг. 1 представлен общий вид фрикционно-планетарного механизма с косой шайбой, на фиг. 2 - вид на косую шайбу сверху, а на фиг. 3, 4 показано тело качения - шарик, взаимодействующий с дорожками качения на лобовом фрикционном диске и на косой качающейся шайбе. На фиг. 5 представлено то же, но с телом качения - роликом. На фиг. 6 и 7 изображены механизмы, стойкие к перегрузкам. Схема на фиг. 8 иллюстрирует принцип действия механизмов, изображенных на фиг. 6 и 7. На фиг. 9 представлена кинематическая схема бесступенчатой передачи с карданной передачей в качестве одного из узлов. На фиг. 10 отдельно изображена муфта Ольдгема. На фиг. 11 показана конструкция узла, обеспечивающего сателлитно-планетарное движение фрикционного диска, с гидро- или пневмоприводом для плавного изменения передаточного отношения. Фиг. 12 поясняет принцип действия узла плавного изменения передаточного отношения на основе двух дисков с прорезями, на фиг. 13 изображен вид сверху на диск с прорезью.
Фрикционно-планетарной механизм с косой шайбой содержит входной и выходной валы 1 и 2. На входном валу 1 закреплен лобовой фрикционный диск 3, взаимодействующий с телом качения 4. Тело качения 4 взаимодействует также с косой качающейся шайбой 5. Шайба 5 через подшипник 6 и торцовый кулачок 7 связана с выходным валом 2. Весь механизм посредством подшипников 8 и 9 закреплен в корпусе, представляющем собой два фланца 10, стянутых между собой стержнями 11. Косая качающаяся шайба 5 по внешней окружности имеет выступы 12, расположенные между стержнями 11 (см. фиг. 2). Эти выступы не позволяют шайбе 5 совершать вращательное движение и не препятствуют ее колебательным качающимся движениям вдоль оси. На фиг. 3 дорожка качения 13 на лобовом фрикционном диске 3 имеет две зоны контакта с телом качения - шариком 4. При этом расстояние r1; от зоны контакта шарика 4 с дорожкой качения 13 на фрикционном диске 3 до оси вращения А - А1 шарика 4 меньше, чем расстояние r2 от оси вращения шарика 4 до зоны его контакта с косой шайбой 5. На фиг. 4 дорожки качения 13 и 14 выполнены на обеих взаимодействующих деталях 3 и 5. Телом качения может быть ступенчатый ролик (см. фиг. 5). В этом случае ролик ступенью 15 меньшего диаметра контактирует с одной из дорожек качения, например, с дорожкой качения 13 на фрикционном диске 3. Тогда ступенью 16 большего диаметра он будет контактировать с дорожкой качения 14 на другой взаимодействующей детали. Символами r1 и r2 здесь также обозначены расстояния от зон контактов тела качения с деталями 3 и 5 до оси вращения тела качения. На фиг. 6 внешняя кольцевая часть 17 фрикционного диска 3 с дорожкой качения 13 на ней выполнена упруго подвижной относительно самого фрикционного диска 3. Подвижность обеспечивается перегибом 18. Следует отметить, что так же может быть выполнена внешняя кольцевая часть косой качающейся шайбы 5, либо внешние кольца с дорожками качения на обеих деталях 3 и 5. На фигурах эти варианты не показаны.
В механизме на фиг. 7 лобовой фрикционный диск 3 закреплен в полом валу 1 посредством шлицевого соединения 19. Шлицевое соединение 19 передает вращение от вала 1 к диску 3 и позволяет последнему совершать небольшие осевые перемещения относительно вала 1. При этом упругий элемент, в частности, пружина 20 поджимает фрикционный диск 3 к телу качения 4. Дорожка качения на лобовом фрикционном диске 3 имеет две зоны контакта 21 и 22 с телом качения 4. Эти зоны расположены на отдельных кольцевых деталях 23 и 24. Детали 23 и 24 поджаты друг к другу кольцевыми пружинами 25 и закреплены на лобовом фрикционном диске 3 с помощью муфт Ольдгема 26, которые обеспечивают вращение колец 23 и 24 совместно с диском 3, но позволяют им совершать небольшие перемещения вдоль радиуса диска 3. При этом зоны контакта шарика 4 с лобовым фрикционным диском 3 перемещаются по поверхности шарика, изменяя расстояние r1 до оси вращения шарика.
В бесступенчатой передаче на основе фрикционно-планетарного механизма (см. фиг. 9) входной вал 1 соединен с лобовым фрикционным диском 3 посредством механизма привода между параллельными осями, допускающего изменение расстояния между ними. На фиг. 9 привод выполнен в виде карданной передачи, состоящей из двух карданов 27 и 28, карданного вала 29 со шлицевым соединением 30. Механизм карданной передачи передает движение от входного вала 1 к смещаемому относительно него валу 31 лобового фрикционного диска 3. Эту же функцию может выполнять и механизм, так называемой, муфты Ольдгема, изображенный на фиг. 10 и состоящий из трех шайб, связанных друг с другом шлицевыми соединениями, перпендикулярными друг другу. На вал 31 посажен внутренний подшипник 32 узла сателлитно-планетарного движения фрикционного диска 3. Наружный подшипник 33 этого узла закреплен в корпусе (на схеме корпус показан условным обозначением). Для плавного изменения скорости бесступенчатой передачи путем изменения расстояния между осью вращения фрикционного диска 3 и точкой его контакта с телом качения 4 необходимо смещать фрикционный диск 3 в радиальном направлении от оси ОО1. Узел, обеспечивающий эту функцию, может быть выполнен на основе гидро- или пневмопривода (см. фиг. 11). Он содержит два цилиндра 34, к которым неподвижно прикреплен внутренний подшипник 32 с валом 31 лобового фрикционного диска 3. Штоки поршней 35 закреплены на внутренней обойме наружного подшипника 33. При подаче рабочего тела в систему привода поршни 35 будут перемещаться относительно цилиндров 34, перемещая при этом внутренний подшипник 32 вдоль радиуса наружного подшипника 33.
Узел смещения лобового диска 3 в радиальном направлении может быть выполнен и так, как показано на фиг. 12. Он представляет собой два параллельных соосных диска 36 и 37, закрепленных во внешнем подшипнике 33 с возможностью поворота друг относительно друга, В каждом из дисков 36 и 37 выполнены наклонные к его радиусу прорези 38 и 39, причем наклон прорезей в дисках противоположен (см. фиг. 13). В месте пересечения прорезей 38 и 39 расположен внутренний подшипник 32 с валом 31 лобового фрикционного диска 3.
Остальные элементы конструкции фрикционно-планетарного механизма остаются в бесступенчатой передаче неизменными. Исключение составляет лишь обязательное требование к дорожке качения 14 на косой качающейся шайбе 5. Эта дорожка должна иметь такой профиль, чтобы надежно удерживать тело качения 4 при смещении фрикционного диска 3. Узел фиксации косой шайбы 5 от вращения на фиг. 9 и 12 выполнен в виде шарнирно рычажного механизма 40.
Работают предлагаемые устройства следующим образом. При вращении входного вала 1 фрикционно-планетарного механизма (фиг. 1) с ним совместно вращается лобовой фрикционный диск 3. При этом тело качения 4, вращаясь вокруг собственной оси вращения А-А1, вовлекается в сателлитное движение по окружности радиуса R по неподвижной дорожке качения на косой шайбе 5. Неподвижность дорожки качения обеспечивается выступами 12 и стержнями 11, которые не позволяют шайбе 5 вращаться (см. фиг. 2). Косое положение шайбы 5 приводит к тому, что шарик 4 оказывается постоянно поджатым к поверхности лобового фрикционного диска 3 без дополнительных прижимных механизмов. При одном обороте вала 1 шарик 4, как сателлит, совершит половину оборота по окружности и переместится на рисунке из крайнего левого положения в крайнее правое. Косая шайба 5 при этом совершит половину своего качающегося движения и, воздействуя через упорный подшипник 6 на торцовый кулачок 7, поворачивает его также на полоборота. Таким образом, предлагаемый механизм имеет передаточное отношение u = n1/n2 = 2. В предлагаемом механизме первое передаточное звено - фрикционное, второе - планетарное, а третье - кулачковое. Сочетание кулачковой и фрикционной передачи позволяет использовать прижимные усилия торцового кулачка 7 в качестве регулируемых прижимных усилий для фрикционного звена.
Передаточный механизм, в котором зоны контакта тела качения 4 с лобовым фрикционным диском 3 и косой шайбой 4 расположены на разных расстояниях от оси вращения тела качения, имеет иное, чем 2, передаточное отношение (фиг. 3, 4, 5). Передаточное отношение фрикционно-планетарного механизма u в зависимости от соотношения расстояний r1 и r2 определяется как u=1+r1/r2 и может быть как больше 2 (при r1 больше r2), так и меньше 2 (при r1 меньше r2).
Механизмы, изображенные на фиг. 6 и 7, обладают способностью адаптироваться к перегрузкам. При действии нормальных расчетных нагрузок тело качения - шарик 4 расположено в месте наибольшего расстояния между лобовым фрикционным диском 3 и косой шайбой 5. На фиг. 8 это положение шарика обозначено цифрой 4. В случае появления на выходном валу перегрузок происходит проскальзывание, шарик 4 сдвигается в азимутальном направлении на угол α и занимает положение 4. При этом шарик смещается вверх и занимает положение, обозначенное на фиг. 6 штриховой линией. Благодаря упругим свойствам кольцевого участка 17 лобового диска 3, зона контакта шарика 4 с лобовым фрикционным диском 3 сдвигается от точки В по направлению к точке С на фиг. 6. Соответственно расстояние r1 от зоны контакта до оси вращения А - А1 шарика 4 увеличивается вплоть до радиуса шарика, увеличивая передаточное отношение и передаваемую нагрузку. При уменьшении перегрузки кольцевой участок 17 и зона контакта шарика с лобовым фрикционным диском возвращаются в первоначальное положение, и передаточное отношение приобретает прежнее значение.
Аналогичным свойством адаптации к перегрузкам, но в более широком диапазоне обладает механизм на фиг. 7. Здесь также при возникновении перегрузки лобовой диск 3 приподнимается вверх, позволяя шарику 4 сместиться на угол α. Возможность осевого перемещения диска 3 обеспечивается шлицевым соединением 19 и пружиной 20. Зоны контакта 21 и 22 шарика 4 с лобовым диском 3 расположены на отдельных кольцевых деталях 23 и 24. Эти кольцевые детали вращаются вместе с лобовым фрикционным диском 3, но при перегрузках при смещении шарика 4 изменяют свое положение в радиальном направлении. Кольцевые пружины 25, сдвигая кольцевые детали 23 и 24 друг к другу, формируют дорожку качения для шарика 4. При этом зоны контакта 21 и 22 также перемещаются по поверхности шарика, изменяя передаточное отношение механизма. Передаточное отношение составляет u = 1+r1/r2, где r1 - переменная величина, зависящая от нагрузки.
Бесступенчатая передача на фиг. 9 и 13 работает следующим образом. Вращение от ведущего вала 1 через карданную передачу передается параллельному валу 31 лобового фрикционного диска 3. При этом лобовой диск 3 кроме вращательного движения относительно собственной оси вместе с валом 31 и подшипником 32 будет совершать также сателлитное движение во внешнем подшипнике 33 относительно оси OO1 входного 1 и выходного 2 валов. Тело качения - шарик 4 будет катиться по дорожке качения 14 радиуса R2 на косой шайбе 5. Относительно лобового фрикционного диска 3 шарик 4 будет совершать движение по окружности радиуса R1. Передаточное отношение механизма составляет u = R2/R1, и зависит от соотношения радиусов R1 и R2. Радиус R1 можно плавно изменять, передвигая вал 31 в радиальном направлении. В передаче на фиг. 9 вал 31 передвигается вместе с внутренним подшипником 32 с помощью двух пневмоприводов, представляющих собой цилиндры 34 и поршни со штоками 35 (см. фиг. 11). В передаче на фиг. 12 передвижение вала 31 производится поворотом двух дисков 36 и 37 друг относительно друга. При этом точка пересечения прорезей 38 и 39 будет смещаться вдоль радиуса, и увлекать за собой вал 31 с подшипником 32, размещенные в месте пересечения прорезей.
Таким образом, предложен новый фрикционно-планетарный передаточный механизм, обладающий высоким кпд, высокой передаваемой мощностью при малых габаритах и простоте конструкции. На базе фрикционно-планетарного механизма разработана новая принципиальная схема бесступенчатой передачи, реализованная в нескольких конструктивных вариантах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ "РЕДУКТОР-ПОДШИПНИК" | 2001 |
|
RU2179272C1 |
| ПЕРЕДАЮЩИЙ УЗЕЛ С КАЧАЮЩЕЙСЯ ШАЙБОЙ (ВАРИАНТЫ) И ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ НА ЕГО ОСНОВЕ (ВАРИАНТЫ) | 2001 |
|
RU2267673C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2198330C2 |
| МОТОР-РЕДУКТОР | 2000 |
|
RU2171526C1 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| МУФТА ДЛЯ ПЕРЕДАЧИ ВРАЩЕНИЯ В ГЕРМЕТИЧНЫЙ ОБЪЕМ | 2003 |
|
RU2252346C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| ПЛАНЕТАРНЫЙ ШАРИКОВЫЙ ПЕРЕДАЮЩИЙ УЗЕЛ | 2003 |
|
RU2246649C1 |
| ШАРИКОВЫЙ ПЕРЕДАЮЩИЙ УЗЕЛ ПРЕОБРАЗОВАТЕЛЯ СКОРОСТИ (ВАРИАНТЫ) | 2004 |
|
RU2291993C2 |


Изобретение относится к машиностроению. Фрикционно-планетарный механизм с косой шайбой содержит входной 1 и выходной 2 валы, связанную с выходным валом 2 через подшипник 6 и торцовый кулачок 7 косую качающуюся шайбу 5 с устройством ее фиксации от вращения, закрепленный на входном валу 1 лобовой фрикционный диск 3 и тело качения 4 для связи диска 3 с шайбой 5. На основе приведенного фрикционно-планетарного механизма возможно создание бесступенчатой передачи. Расширен арсенал средств, преобразующих движение с плавно регулируемым передаточным отношением. 2 с. и 10 з.п. ф-лы, 13 ил.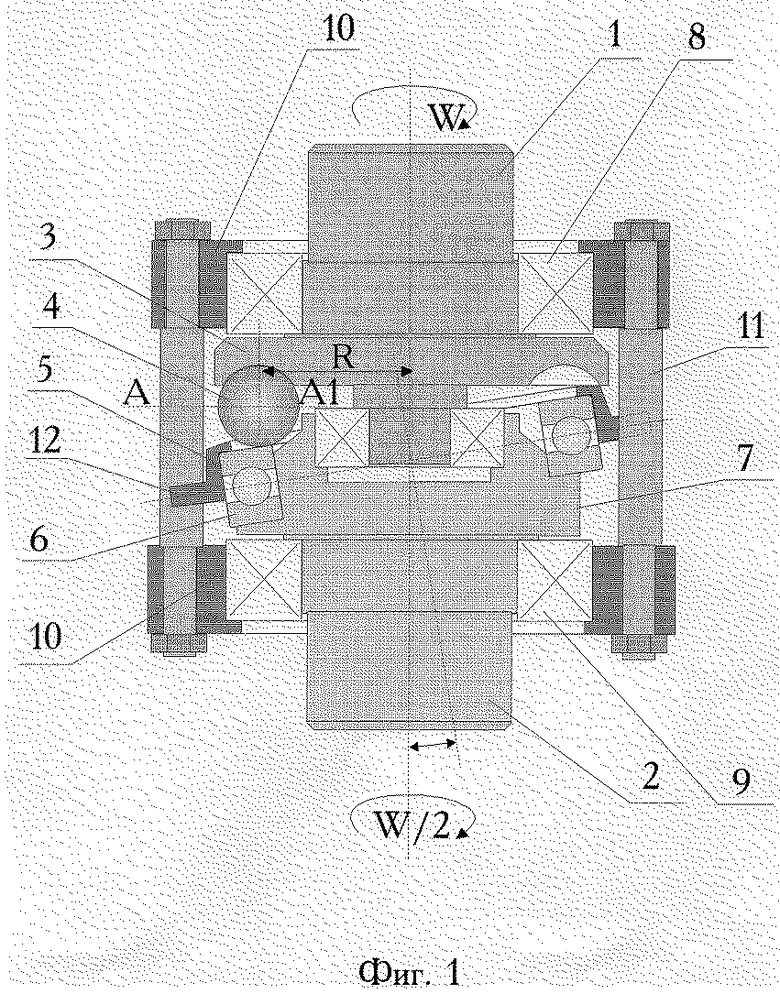
| Планетарная передача | 1942 |
|
SU64654A1 |
| US 3661036 А, 09.05.1972 | |||
| Механизм возврата каретки к началу строки для печатающих устройств | 1976 |
|
SU636109A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |

