Изобретение относится к машиностроению, в частности к электроприводам, управляющим трубопроводной арматурой, например, задвижками или шаровыми кранами, и может быть использовано для дистанционного и местного управления запорной аппаратуры (в том числе высокого давления) на магистральных трубопроводах. Особые преимущества привод имеет для управления механизмами с большим поступательным перемещением штока исполнительного механизма.
Обычной практикой для задвижек или клапанов (например, тех, которые используются в системе трубопроводов заводов химических процессов), является использование исполнительных механизмов, приводимых электродвигателями и, для обеспечения безопасности, ручными дублерами, работающими, например, при отключении питания электродвигателя. Известные комбинированные приводы различны по конструкциям, но все они обладают рядом существенных недостатков.
Известен электропривод по патенту РФ № 2005944 (публ. 15.04.94, МПК F 16 K 31/04), содержащий электродвигатель с полым ротором, в котором размещен планетарно-винтовой редуктор, резьбовая втулка которого взаимодействует с винтовой резьбой проходящего внутри нее шпинделя. Ручной дублер в данном приводе вращает непосредственно шпиндель, и при неожиданном включении электродвигателя привод становится опасным для оператора.
Электропривод в описании к патенту РФ № 2132990 (публ. 10.07.99, МПК F 16 K 31/04) содержит электродвигатель с полым ротором, через который проходит винтовой шпиндель исполнительного механизма, редуктор и ручной дублер, связанный со входным звеном редуктора. Редуктор выполнен в виде двухрядной шариковой планетарной передачи. Шариковая передача обладает малыми габаритами и простотой конструкции. Однако удачное решение передаточного блока совмещается в этом приводе с рядом других недостатков. Переключение с ручного привода на электрический производится механически с помощью кинематической связи при насаживании или снятии маховика ручного управления. Механическое отключение связи электродвигателя со входом редуктора продублировано электрическим выключателем. Основным недостатком такого привода является его низкая скорость срабатывания при ручном управлении, так как вращение маховика подается на вход редуктора с высоким передаточным отношением. Кроме того, насаживание маховика также требует времени, которого в аварийной ситуации может оказаться недостаточно.
В вышеописанных аналогах может использоваться только двигатель с полым ротором, что удорожает привод.
В приводе с ручным дублером по патенту РФ № 2103582 (публ. 27.01.98, МПК F 16 K 31/05) электродвигатель любого типа связан со шпинделем исполнительного механизма через зубчатый редуктор, а маховик ручного дублера - через червячную передачу. Переключение режимов осуществляется кулачковой муфтой сцепления с механизмом ее принудительного перемещения. При включении электродвигателя муфта разъединяет сначала связь шпинделя с маховиком ручного управления, а затем происходит контакт выходного зубчатого колеса редуктора со шпинделем исполнительного механизма. Привод безопасен в работе для оператора, но имеет значительные массу и габариты, обусловленные увеличением габаритов зубчатого редуктора для получения требуемых передаточных отношений. Кроме того, наличие муфты сцепления существенно снижает коэффициент полезного действия привода.
В электроприводе по патенту РФ № 2154219 (публ. 10.08.2000, МПК F 16 K 31/05) габариты уменьшены за счет двухступенчатого редуктора, вторая ступень которого выполнена в виде малогабаритного шарикового редуктора. Маховик ручного управления связан с входом второй ступени редуктора. Переключение режимов, как и в предыдущем патенте, производится с помощью муфты сцепления, которая подключает к входу второй ступени поочередно выход первой ступени редуктора, либо маховик ручного дублера.
Переключение дублируется электрическим выключателем. Недостаток - наличие специальных переключающих устройств конструкции и снижает кпд привода.
Привод запорно-регулирующей арматуры РЮД по патенту РФ № 2108513 (публ. 10.04.98, МПК F 16 K 31/05) имеет двухступенчатый редуктор. Первая ступень редуктора - зубчатая передача, а вторая - планетарная передача с двумя центральными колесами и сателлитами, водило которых является выходным валом привода. Выход первой ступени редуктора связан червячной передачей с внутренним центральным колесом второй ступени. Маховик ручного привода связан червячной передачей с внешним центральным колесом. Таким образом, при работе электродвигателя внешнее колесо второй ступени является неподвижным (застопорено червяком ручного дублера), и сателлиты, обкатывая его, передают вращение водилу и выходному валу привода. При вращении маховика ручного привода, второе червячное зацепление вращает наружное колесо планетарной передачи, а ее внутренне колесо неподвижно, т. к. связано с червячным колесом первого червячного зацепления. Переключение режимов продублировано выключателем, срабатывающим от блока контроля положения выходного вала. Привод обеспечивает высокие передаточные отношения, но его основной недостаток - большие габариты, т.к. он имеет две червячных передачи и две ступени зубчатых передач.
Привод по патенту GB № 2018937 (публ. 21.10.79, МПК F 16 K 31/05), выбранный нами за прототип, содержит корпус из двух секций, в одной из которых размещен электродвигатель, а в другой - передаточный блок. Сквозь обе секции проходит параллельный оси электродвигателя общий вал, на котором монтируются все элементы передаточного блока. Вращение вала двигателя зубчатым зацеплением передается к колесу, на котором закреплен эксцентрик, являющийся входным звеном планетарного редуктора. На эксцентрике на подшипниках свободно вращается двухвенцовый сателлит, взаимодействующий с венцами двух центральных колес планетарного редуктора. Его балансировка осуществляется с помощью балансного элемента эксцентрика, выполненного в форме полумесяца и расположенного диаметрально противоположно эксцентрику. Одно из центральных колес редуктора связано с общим валом и является выходным, для чего имеет шпонку для связи со шпинделем исполнительного механизма. Другое центральное колесо на своей наружной поверхности имеет червячное колесо, зацепляющееся с червяком ручного привода. Червяк ручного привода закреплен во второй секции корпуса. Входное колесо с эксцентриком посажено с помощью подшипников на общий вал, а центральное колесо, взаимодействующее с червяком, имеет свободную посадку и зацепляется с одной стороны с червяком, а с другой - с одним из зубчатых венцов сателлита. Это центральное колесо при работе от электродвигателя является неподвижным опорным элементом передаточного блока, удерживаемым червяком от вращения. Данный привод может использовать любой электродвигатель, так как его ось смещена от центральной оси механизма, вдоль которой может проходить шпиндель или шток задвижки.
При использовании ручного привода червяк вращает центральное колесо передачи, и это вращение через двухвенцовый сателлит передается другому центральному колесу и шпинделю исполнительного механизма. Редуктор в этом случае работает не как планетарный, а как простая зубчатая передача с передаточным отношением, определяемым соотношением числа зубьев венцов сателлита и числа зубьев обоих центральных колес. Таким образом, основными недостатками указанного привода являются большие габариты и сложность привода, обусловленные использованием двухвенцовой планетарной зубчатой передачи, в которой для улучшения балансировки эксцентрик снабжен противовесом. Неудачна в конструктивном исполнении посадка связанного с червяком центрального колеса, имеющего возможность заклинивания. Кроме того, при ручном приводе к снижению скорости вращения червячной передачей добавляется снижение скорости зубчатой передачей, имеющей для описанной в патенте конструкции передаточное отношение порядка 2:1, что снижает быстродействие ручного привода, нежелательное при возникновении аварийных ситуаций.
Задачей изобретения является разработка привода исполнительного механизма, обладающего возможностью работы от электродвигателя и/или от ручного привода с развязкой кинематических цепей последних, имеющего минимальные габариты и вес, простого по конструкции и использующего электродвигатель любого типа. Техническим результатом изобретения является исключение вероятности отказа работы привода. Кроме того, техническим результатом является снижение веса и габаритов не только за счет применения малогабаритного передаточного узла, но и за счет того, что в предложенной схеме возможно разделение опоры и корпуса передаточного блока, поэтому корпус, закрывающий объем устройства, может быть облегченным, выполненным только для защиты от пыли и влаги. Дополнительным техническим результатом является то, что червячное колесо ручного привода связано со штоком исполнительного механизма без передаточного отношения и нет дополнительной редукции, которая снижала бы быстродействие ручного привода, что особенно важно для ликвидации аварийных ситуаций.
Поставленная задача решается тем, что комбинированный привод исполнительного механизма от электродвигателя и/или от ручного усилия, как и прототип, содержит несущий корпус, устанавливаемый на корпусе исполнительного механизма, электродвигатель и передаточный блок. Вход передаточного блока связан с электродвигателем, выход - со штоком исполнительного механизма, а один из элементов этого блока является опорным и связан с несущим корпусом через червячную передачу, установленную в корпусе, червяк которой связан с ручным приводом. В отличие от прототипа передающий узел передаточного блока образован тремя соосными обоймами с периодическими кулачковыми элементами, выполненными на обращенных друг к другу поверхностях каждой из обойм. Кулачковые элементы взаимодействуют друг с другом посредством цепочки шариков. Одна из обойм является входом, другая выходом, а третья - опорным элементом передаточного блока. Все обоймы передаточного блока связаны между собой посредством подшипников, образуя замкнутую кинематическую цепь относительно опорной обоймы.
При этом входная обойма может быть выполнена в виде качающейся шайбы, связанной с валом электродвигателя механизмом, вызывающим прецессию.
В другом варианте выполнения комбинированный привод исполнительного механизма от электродвигателя и/или от ручного усилия содержит несущий корпус, устанавливаемый на корпусе исполнительного механизма, электродвигатель и передаточный блок. Вход передаточного блока связан с электродвигателем, выход - со штоком исполнительного механизма, а один из элементов является опорным и связан с несущим корпусом через червячную передачу, установленную в корпусе, червяк которой связан с ручным приводом. В отличие от прототипа передаточным блоком является преобразователь скорости с качающейся шайбой, состоящий из четырех соосных обойм. Одна из обойм является входной и связана с другой обоймой - качающейся шайбой механизмом, вызывающим ее прецессию. Передающий узел передаточного блока образован качающейся шайбой и третьей обоймой, которые охватывают друг друга. На боковых, обращенных друг к другу поверхностях этих обойм выполнены периодические кулачковые элементы, зацепляющиеся друг с другом посредством цепочки шариков. Качающаяся шайба связана с четвертой обоймой механизмом передачи вращения между несоосными валами. Третья и четвертая обоймы могут служить либо выходом блока, либо опорным элементом, причем все обоймы связаны между собой посредством подшипников, образуя замкнутую кинематическую цепь относительно опорной обоймы.
Такое устройство по сравнению с прототипом обеспечит минимально возможные для данных передаточного отношения и передаваемого момента вес и габариты, безопасность для оператора и повышенную надежность привода. Замкнутость кинематической цепи относительно опорной обоймы позволяет отказаться от внешнего объемного несущего корпуса для передаточного блока, что еще более снижает вес и габариты привода.
При этом, может быть несколько вариантов компоновки основных узлов передаточного блока, а также совмещения их с электродвигателем.
В одном из вариантов компоновки входная обойма передаточного блока выполнена из двух отдельных колец с зубчатыми венцами наружного зацепления и с торцевыми кулачками, воздействующими на торцы расположенной между ними качающейся шайбы через подшипники. Зубчатые венцы находятся в зацеплении с зубчатым колесом на валу двигателя.
Этот вариант позволяет использовать обычный серийно выпускаемый электродвигатель, поэтому является дешевым и доступным.
В такой компоновке механизм передачи вращения между несоосными валами целесообразно выполнить на свободной боковой поверхности качающейся шайбы и обращенной к ней боковой поверхности обоймы в виде соединения равных угловых скоростей.
Можно увеличить передаточное отношение блока посредством введения второй аналогичной ступени передачи с качающейся шайбой, качающиеся шайбы обеих ступеней связаны друг с другом торцами посредством механизма параллельных кривошипов, и вторая ступень выполняет функцию механизма передачи вращения от качающейся шайбы к выходной обойме передаточного блока.
В следующих двух вариантах компоновки используется электродвигатель с полым ротором, проходящим через обоймы передаточного блока. Полый ротор может быть использован как с передаточным блоком по первому варианту изобретения, так и с передаточным блоком из четырех обойм. Внешняя поверхность полого ротора может быть совмещена с входной обоймой передаточного блока. Эти варианты требуют более дорогостоящего двигателя, но устройство становится более компактным, поскольку не требует использования дополнительных элементов для передачи вращения ротора электродвигателя на входной элемент передаточного блока, и корпус электродвигателя является одновременно и несущим корпусом передаточного блока.
Варианты привода, в которых механизм, возбуждающий прецессию шайбы, выполнен в виде торцевых кулачков на кольцах входной обоймы, очень хорошо компонуются с электродвигателями с полым дисковым или полым цилиндрическим ротором. В первом случае ротор двигателя состоит из двух параллельных дисков, между которыми расположены обоймы передающего узла. Обращенные друг к другу торцы дисков совмещены с кольцами входной обоймы. Во втором случае передающий узел размещен в поперечном разрезе цилиндрического ротора, и торцы в поперечном разрезе совмещены с кольцами входной обоймы.
Далее изобретение поясняется рисунками, на которых представлено:
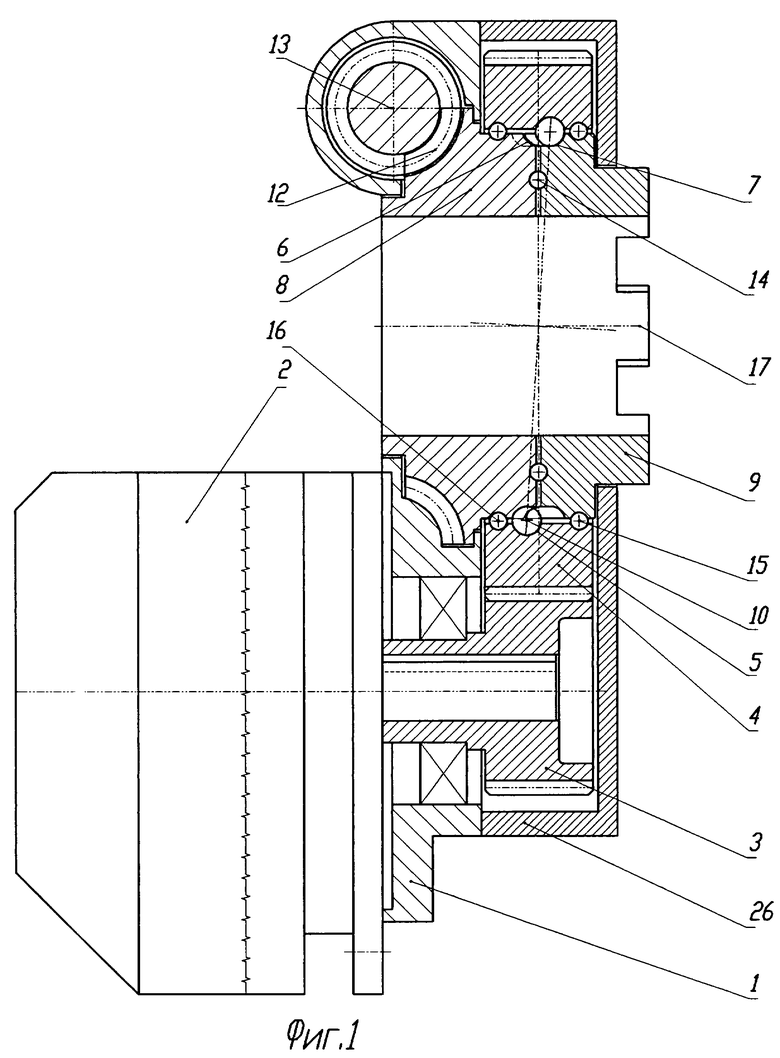
фиг.1 - принципиальная схема первого варианта комбинированного привода;
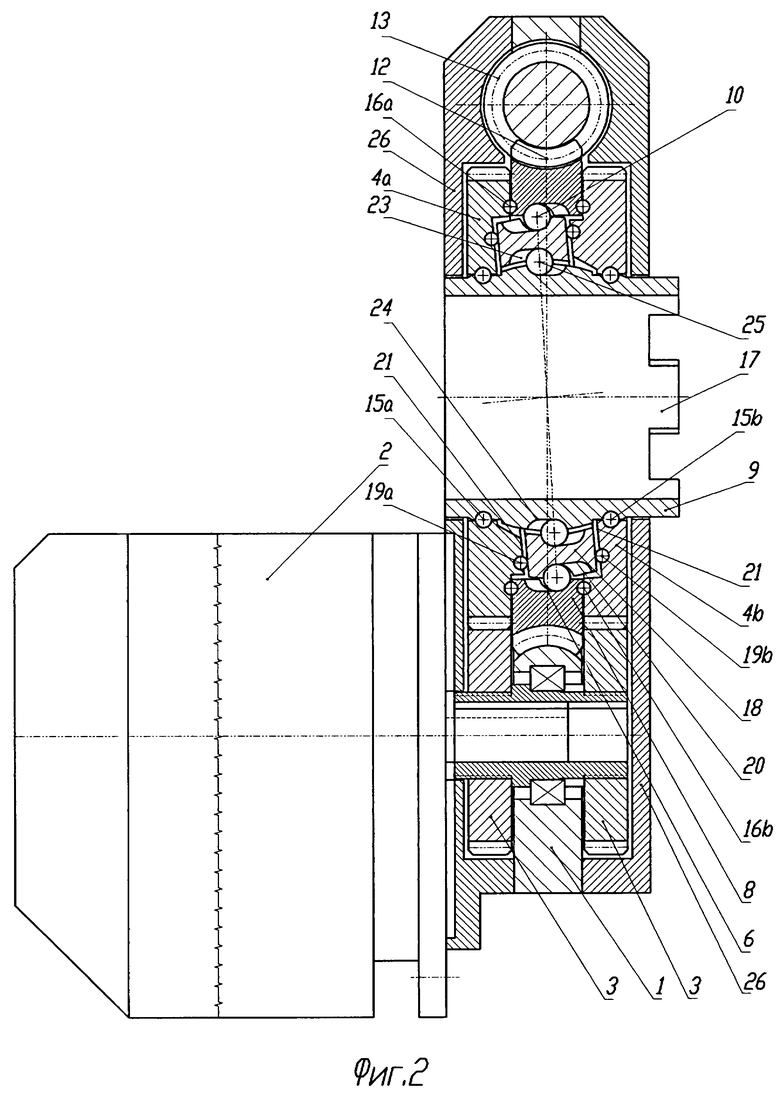
фиг.2 - схема второго варианта привода и его компоновка с серийным электродвигателем;
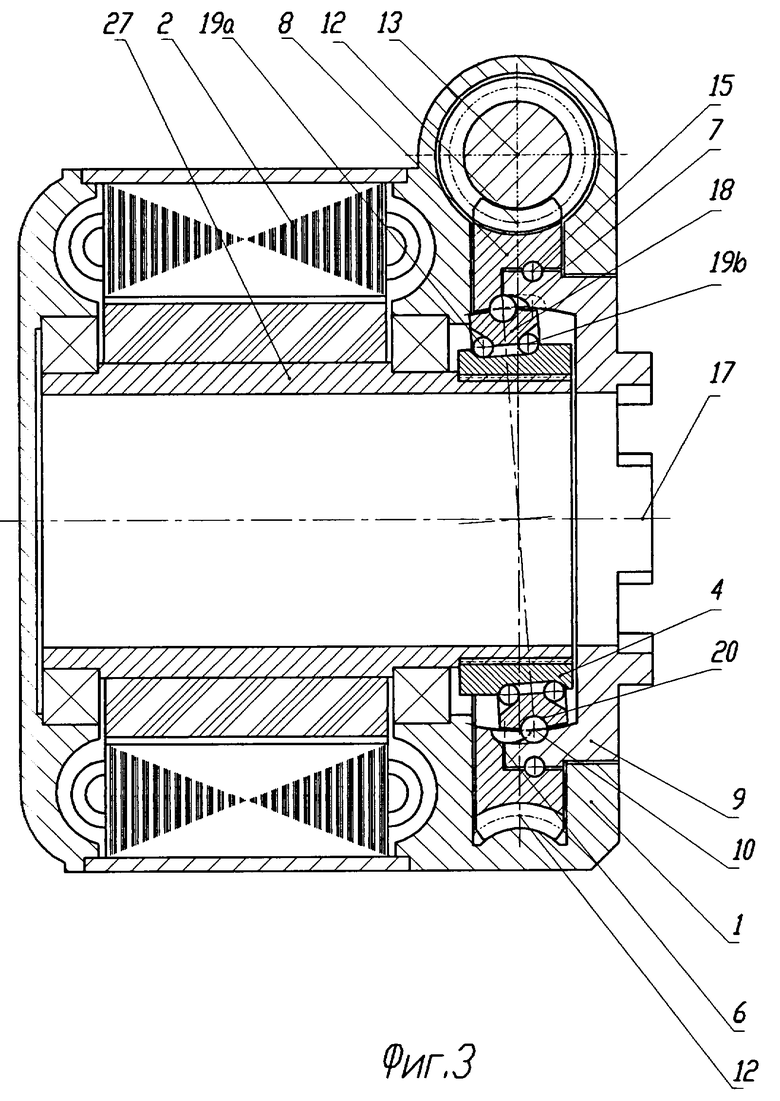
фиг.3 - первый вариант комбинированного привода в компоновке с полым ротором электродвигателя;
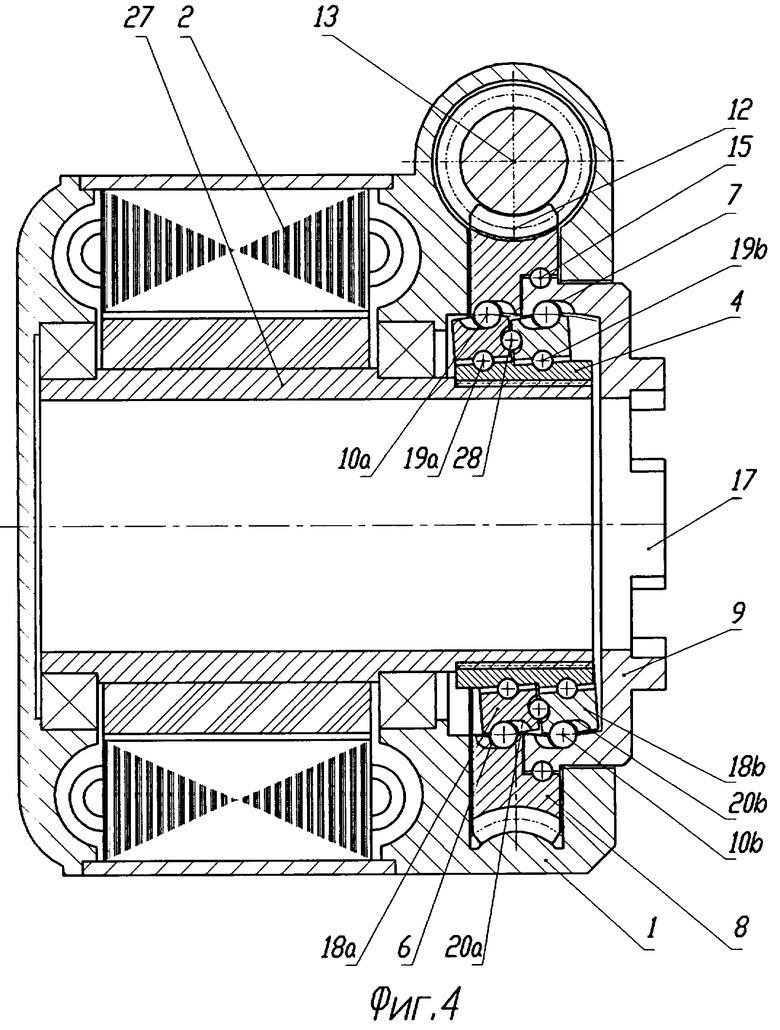
фиг.4 - вариант компоновки передаточного блока из двух ступеней с полым ротором электродвигателя;
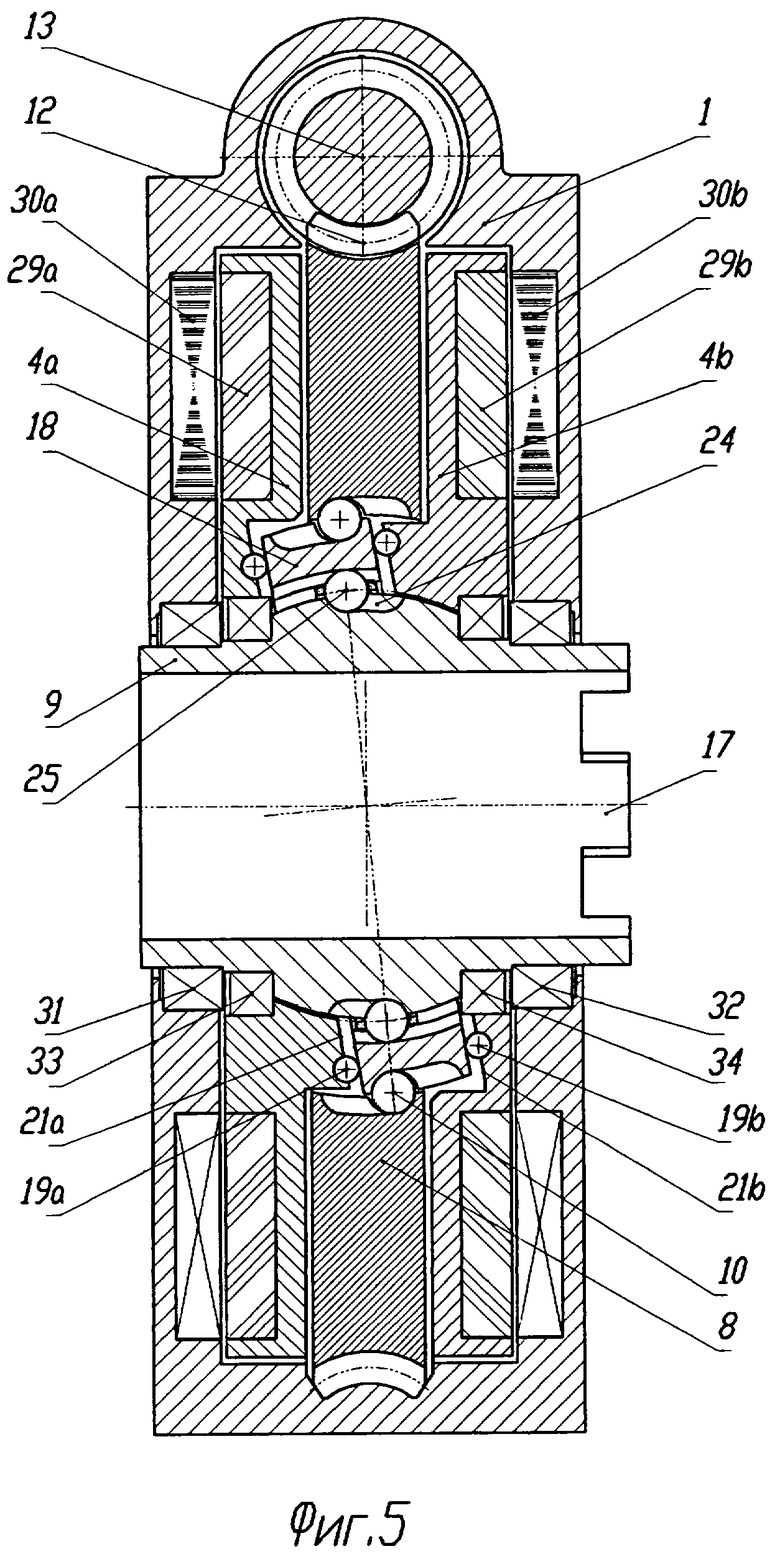
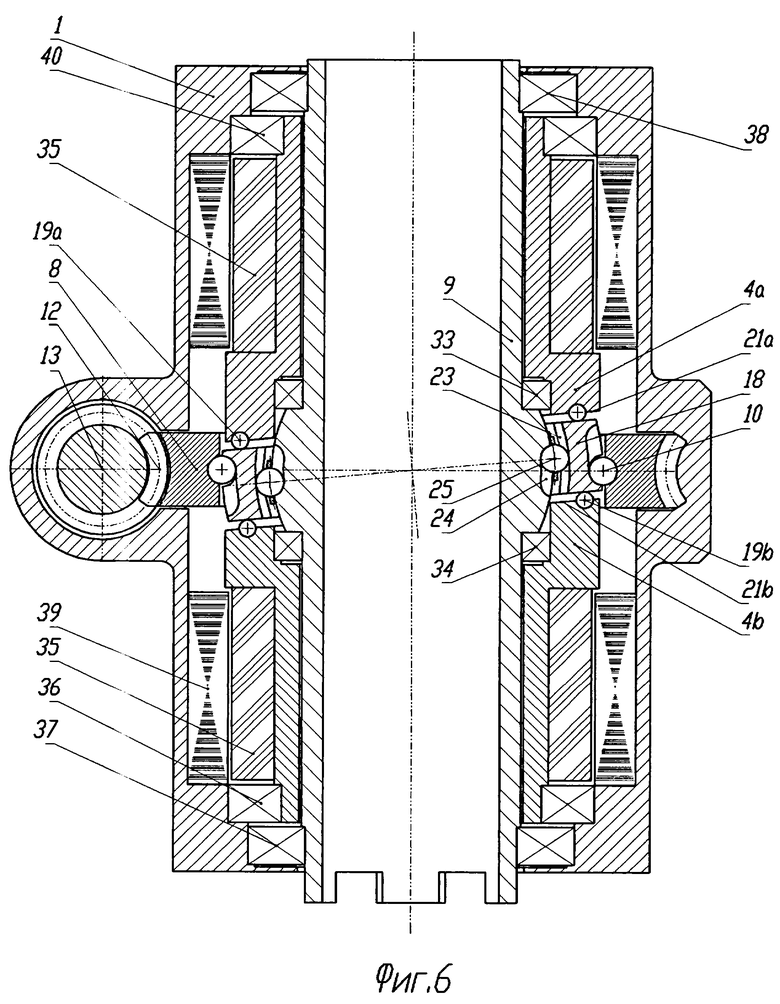
фиг.5 и 6 - варианты компоновки передаточного блока с электродвигателем в дисковом и цилиндрическом исполнении.
Комбинированный привод в варианте на фиг.1 содержит несущий корпус 1 в виде пластины, на котором установлен электродвигатель 2 и червяк 13 червячной передачи ручного привода. Вращение на передаточный блок привода передается через блок шестерен 3 и 4 (либо через шкив ременной передачи и т.п.). Шестерня 4 является входной обоймой передаточного блока и на внутренней боковой поверхности имеет периодический кулачковый элемент 5, сопрягаемый с периодическими кулачковыми элементами 6 и 7 на поверхностях опорной обоймы 8 и выходной обоймы 9. В постоянном контакте со всеми тремя кулачковыми элементами находится цепочка шариков 10. При этом в примере на фиг.1 периодические кулачковые элементы на обоймах 8, 9 выполнены в виде периодических дорожек 6 и 7 на поверхностях обойм 8 и 9, причем на обойме 8 - замкнутая волнообразная дорожка качения, а на обойме 9 - прерывистые разнесенные по азимуту и вытянутые вдоль оси канавки, число которых совпадает с числом шариков 10. На внутренней поверхности входной обоймы 4 выполнен однопериодный кулачковый элемент в виде наклонной кольцевой канавки 5. Выполнение этих элементов на указанных обоймах приведено только в качестве примера, любая из обойм передающего узла может содержать любой из этих кулачковых элементов, как, например, в нашем патенте RU 2179272. Однако, следует отметить, что на внутренней поверхности технологически более простым элементом является косая канавка или система канавок, а волнообразную замкнутую дорожку качения лучше выполнять на внешней поверхности обойм. На опорной обойме 8 закреплено червячное колесо 12. Червячное колесо 12 зацепляется с самотормозящим червяком 13, на валу которого установлена рукоятка ручного привода. Червяк 13 установлен в несущем корпусе 1 с возможностью вращения. Опорная обойма 8 не имеет непосредственной связи с несущим корпусом 1, а связана с ним через червяк, который не вращается от червячного колеса, при этом, червячное колесо может вращаться от червяка. Поэтому опорная обойма 8 неподвижна при работе от электродвигателя, но имеет возможность вращения при работе от ручного привода. Благодаря подшипникам 14, 15 и 16 все обоймы передаточного блока связаны в замкнутую кинематическую цепь относительно опорной обоймы 8. Несущий корпус 1 устанавливается непосредственно на корпусе исполнительного механизма. Кожух 26 защищает механизм привода от пыли и влаги и может быть выполнен из недорогого листового материала. На выходном элементе 9 выполнены шлицы 17, входящие в пазы гайки бугеля (не показана) для соединения со штоком исполнительного механизма.
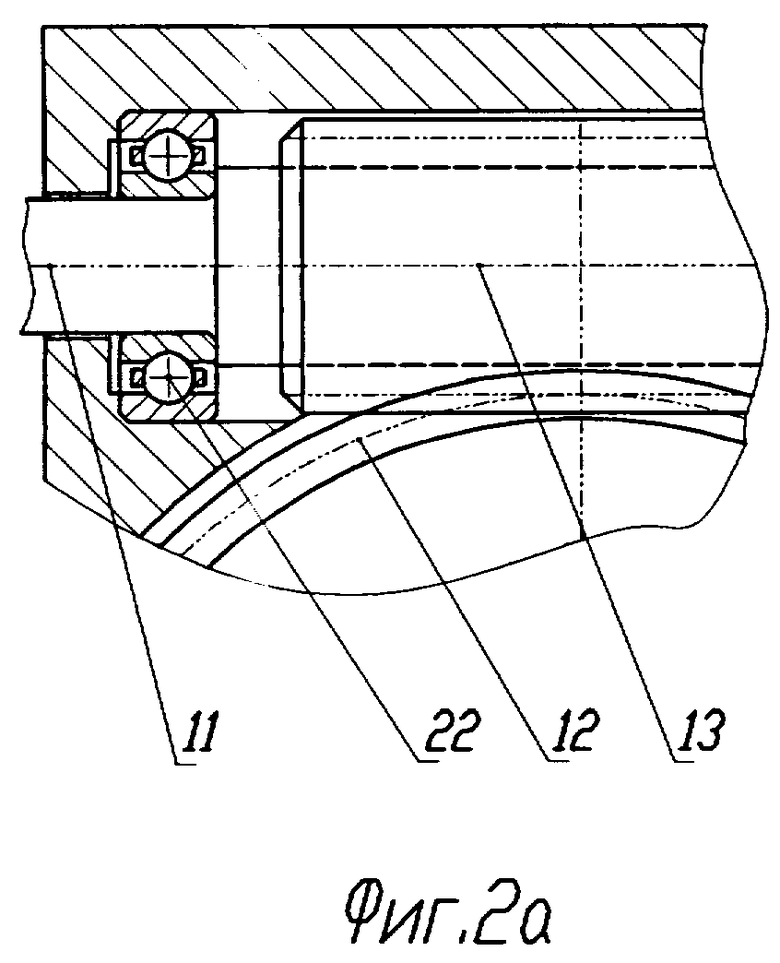
Комбинированный привод в соответствии со вторым вариантом изобретения (фиг.2) также имеет несущий корпус 1 с размещенным на нем электродвигателем 2. Вращение на передаточный блок привода передается через блок колес 3 и 4 зубчатой передачи (либо через шкив ременной передачи). Здесь колесо 4, оно же входная обойма передаточного блока выполнена в виде двух колец 4а и 4b, имеющих зубчатое или иное зацепление с колесом 3. Между кольцами расположена качающаяся шайба 18. На торцевых поверхностях колец 4а и 4b, обращенных к качающейся шайбе, выполнены торцевые кулачки 21а и 21b, вызывающие прецессию качающейся шайбы 18 через подшипники 19а и 19b. Качающаяся шайба 18 вместе с охватывающей ее опорной обоймой 8 образуют передающий узел. Для этого на наружной боковой поверхности качающейся шайбы 18 выполнен периодический кулачковый элемент в виде волновой дорожки 20 для качения шариков 10, через которые она взаимодействует с ответной дорожкой 6 на внутренней поверхности опорной обоймы 8. Вместо дорожки на внутренней поверхности опорной обоймы 8 могут быть выполнены лунки, удлиненные или полусферические, число которых соответствует числу шариков 10. Выполнение лунок вместо изогнутых волнообразных дорожек на внутренней поверхности наружной обоймы существенно упрощает технологию изготовления передающего узла. На наружной боковой поверхности опорная обойма 8 имеет червячное колесо 12, зацепляющееся с самотормозящим червяком 13, и имеет возможность вращения относительно несущего корпуса 1 при работе от ручного привода. На валу червяка крепится рукоятка ручного привода 11, показанная частично на фиг.2а. Вал червяка 13 через подшипники 22 установлен в несущем корпусе 1. Вращение качающейся шайбы 18 к выходной обойме 9 передается с помощью узла передачи между несоосными валами. На данной схеме этот механизм представляет собой соединение равных угловых скоростей, образованное осевыми канавками 23 на внутренней кольцевой поверхности качающейся шайбы 18 и ответными канавками 24 на выходной обойме 9 с шариками 25 между ними. Возможны и иные, известные в технике варианты выполнения этого узла.
Кольца 4а и 4b входной обоймы посажены на обойму выходного элемента 9 с помощью подшипников 15а и 15b, обеспечивающих возможность независимого вращения обойм относительно друг друга. Аналогично, подшипники 16а и 16b установлены между кольцами входной обоймы 4а и 4b и опорной обоймой 8. Выходная обойма 9 посредством шлицев 17 и пазов гайки бугеля (не показанной) взаимодействует со штоком исполнительного механизма. В результате, все обоймы передающего узла образуют замкнутую кинематическую цепь, и передающий узел опирается с одной стороны на вал электродвигателя, с другой - на шток исполнительного механизма, и связан с несущим корпусом через червяк 13. Защитный кожух 26 может быть выполнен тонкостенным и из дешевого материала, так как он не выполняет функцию опоры, а только закрывает механизм от пыли и влаги. В этом варианте опорная обойма 8 также неподвижна при работе от электродвигателя за счет зацепления червячного колеса 12 с самотормозящим червяком 13, но может поворачиваться относительно несущего корпуса 1 при работе от ручного привода. Этот вариант привода использует обычный серийно выпускаемый тип электродвигателя и является самым дешевым вариантом.
Компоновка передаточного блока с электродвигателем с полым ротором, показанная на фиг.3, иллюстрирует вариант, в котором передающий узел передаточного блока образован тремя взаимодействующими через цепочку шариков 10 обоймами 8, 9 и 18 с периодическими кулачковыми элементами 6, 7 и 20. То есть весь передающий узел этого варианта, состоящий из трех обойм, аналогичен передающему узлу фиг.1 с аналогичным расположением кулачковых элементов на обоймах. Отличие состоит в том, что в быстроходной части развязаны вращательное и колебательное движение шариков 10. Для этого входная обойма выполнена в виде качающейся шайбы 18 с однопериодным кулачковым элементом - прямой кольцевой канавкой 20. Привод также содержит несущий корпус 1 и электродвигатель 2 с полым ротором 27, проходящим через обоймы передаточного блока. Здесь несущим корпусом является корпус двигателя, а передаточный блок встроен в его фланец. Качающаяся шайба 18 посажена на ротор 27 двигателя с помощью механизма, вызывающего прецессию шайбы 18. В приведенной схеме этот механизм представляет собой косую канавку на обойме 4 (или непосредственно на внешней поверхности ротора 27) и радиально - упорные подшипники 19а и 19b. Такое их выполнение обеспечивает фиксацию взаимного положения качающейся шайбы 18 относительно входной обоймы 4. Подшипники 15 в этом варианте обеспечивают посадку и независимое вращение выходной обоймы 9 и опорной обоймы 8. Так же, как и в других вариантах, опорная обойма 8 имеет червячное колесо 12, зацепляющееся с червяком 13, связанным с ручным приводом.
Второй вариант привода в компоновке с электродвигателем с полым ротором представлен на фиг.4. В этом варианте используется передающий узел, такой же как на фиг.2, но дополнительно введена вторая ступень передачи с качающейся шайбой. Несущим корпусом 1 является корпус электродвигателя. Входная обойма 4 посажена непосредственно на полый ротор 27 и связана с качающимися шайбами 18а и 18b механизмом, вызывающим их прецессию. В данном случае он представляет собой косые кривошипы, на которые через подшипники 19а и 19b посажены шайбы 18а и 18b. Качающиеся шайбы связаны между собой механизмом с параллельными кривошипами 28. Периодическая дорожка 20а одной качающейся шайбы через шарики 10а зацепляется с периодической дорожкой или лунками 6 на опорной обойме 8, на которой посажено червячное колесо 12, зацепляющееся с червяком 13. Периодический кулачковый элемент 20b второй качающейся шайбы, через шарики 10b взаимодействующий с кулачковым элементом 7 на выходной обойме 9, образует с ней вторую ступень передачи. Причем этот узел может быть выполнен с передаточным отношением либо без него, передавая вращение с той же скоростью. Передающий узел второй ступени является узлом передачи вращения качающейся шайбы 18а к выходной обойме 9. Все остальные элементы аналогичны элементам на предыдущих рисунках. Здесь также с помощью подшипников 19а, 19b и 15 все обоймы передаточного узла связаны в замкнутую кинематическую цепь.
На фиг.5 представлен вариант привода с электродвигателем с полым ротором из двух дисков. На обращенных друг к другу поверхностях двух дисковых роторов 29а и 29b, совмещенных с кольцами 4а и 4b входной обоймы, выполнены торцевые кулачки 21а и 21b. Кулачки воздействуют на торцы качающейся шайбы 18 через подшипники 19а и 19b. Выполнение остальных элементов передаточного блока аналогично варианту на фиг.2, за исключением того, что электродвигатель содержит две дисковых обмотки 30а и 30b, размещенные в общем корпусе 1. Подшипники 31 и 32 обеспечивают посадку и независимое вращение выходной обоймы 9 относительно корпуса двигателя, который в данном варианте также является несущим корпусом привода 1, и подшипники 33 и 34 обеспечивают независимое вращение выходной обоймы 9 относительно входной обоймы 4.
Фиг.6 иллюстрирует привод с двигателем с полым разрезным ротором в цилиндрическом исполнении. Здесь в разрезе цилиндрического ротора 35 вставлены кольца 4а и 4b входной обоймы. На торцах колец, обращенных к расположенной между ними качающейся шайбе 18, выполнены торцевые кулачки 21а и 21b, и подшипники 19а и 19b, которые вызывают прецессию качающейся шайбы 18. В середине цилиндрического корпуса электродвигателя 1, который является несущим корпусом, расположена опорная обойма 8 передаточного блока. Выходная обойма 9 связана с качающейся шайбой соединением равных угловых скоростей, состоящим из канавок 23 и 24 и шариков 25. Все остальные элементы привода выполнены так же, как и в варианте на фиг.2. Подшипники 33 и 34 обеспечивают посадку и вращение колец входной обоймы 4 относительно выходной обоймы 9. Подшипники 36 и 40 это подшипники двигателя, они одновременно развязывают вращение входных колец 4а и 4b относительно корпуса 1. Подшипники 37 и 38 обеспечивают вращение выходной обоймы 9 относительно корпуса привода 1. Обмотки статора на этом рисунке обозначены цифрой 39.
Работа привода по данному изобретению описывается, начиная с варианта, изображенного на фиг.1. При включении электродвигателя 2, его вращение через шестерню 3 передается входной обойме 4 передаточного блока привода. Опорная обойма 8 червячным колесом 12 связана с червяком 13. Червячное соединение при ведущем червячном колесе обладает свойством самоторможения, т.е. вращение колеса не передается червяку, и опорная обойма 8 остается неподвижной. Тогда вращение входной обоймы 4 на фиг.1 посредством шариков 10, расположенных в продольных канавках 7 обоймы 9 и обкатывающих дорожки 5 и 6 на обоймах 4 и 8, передается выходной обойме 9 с передаточным отношением, определяемым соотношением числа периодов дорожки 6 и шариков 10, которые различны. Поскольку при таком исполнении все шарики находятся в зацеплении с дорожками 5 и 6, увеличена нагрузочная способность передаточного блока. При работе от ручного привода вращение рукоятки 11 (фиг.2а) вращает вал с червяком 13. Червячная передача в этом направлении передает вращение к червячному колесу 12 и опорной обойме 8. Передающий узел такого типа не может работать как мультипликатор, поэтому обоймы 8 и 9 вращаются с одинаковой скоростью, как одна деталь. Таким образом, вращение червячного колеса 12 приводит к вращению выходной обоймы 9 без понижения скорости. Т.е. передаточное отношение при работе ручного привода определяется только передаточным числом червячной передачи. Привод может работать одновременно от электродвигателя и ручного управления, так как передаточный блок в этом режиме будет суммировать или вычитать входные скорости в зависимости от направлений вращения двигателя и рукоятки ручного привода. По сравнению с существующими аналогами, в приводе по данному изобретению работа от электродвигателя и от ручного привода происходит через один и тот же передаточный блок, не требуя дополнительных переключающих элементов, обеспечивая при этом безопасность для оператора и достаточно высокую скорость на выходе от ручного привода. По сравнению с прототипом существенно снижены габариты и вес не только за счет применения малогабаритного шарикового передаточного блока, но и за счет того, что для крепления передаточного блока не нужен дополнительный корпус. Несущим корпусом является либо пластина, как изображено на фиг.1 и 2, либо непосредственно корпус электродвигателя (торец корпуса на фиг.3 и 4).
Работа комбинированного привода по второму варианту (фиг.2) происходит следующим образом. При включении электродвигателя 2, его вращение передается через шестерню 3 на кольца 4а и 4b входной обоймы 4 с торцевыми кулачками 21а и 21b. При повороте колец 4а и 4b на один оборот, качающаяся шайба 18 и каждый шарик 10 последовательно совершит одну волну возвратно-поступательного перемещения. Шарики 10, взаимодействуя с периодической дорожкой качения 20 на качающейся шайбе 18 и с периодической дорожкой 6 на опорной обойме 8, повернут качающуюся шайбу 18 относительно опорной, заторможенной червяком 13, обоймы 8 на угол, определяемый соотношением периодов дорожек 20 и 6. Вращение шайбы 18 через шарнир равных угловых скоростей передается выходной обойме 9 и связанному с ней штоку исполнительного механизма. При ручном приводе оператор вращает рукоятку ручного привода 11 на валу червяка 13. Червячное колесо 12 заставляет поворачиваться опорную обойму 8, которая не связана непосредственно с несущим корпусом привода 1. Поворот опорной обоймы 8 не преобразуется в качающееся движение шайбы 18, а поворачивает ее без изменения скорости вращения. Это вращение шайбы 18 через соединение равных угловых скоростей передается выходной обойме 9.
Работа варианта привода с полым ротором, показанного на фиг.3, происходит следующим образом. При включении электродвигателя 2, обойма 4 вращается вместе с полым ротором 27, с внешней поверхностью которого она совмещена, и вызывает прецессию входной обоймы передающего узла - качающейся шайбы 18. Шарики 10 передающего узла, взаимодействуя с периодическими дорожками 6 и 7 на опорной обойме 8 и выходной обойме 9, вызывают вращение выходной обоймы 9, поскольку опорная обойма 8 зафиксирована зубчатым зацеплением 12 с червячным элементом 13. Обойма 9 вращает связанный с ней шток исполнительного механизма с передаточным отношением, определяемым соотношением чисел периодов волновых дорожек 6 и 7. Ручной привод работает так же, как и в предыдущих вариантах, и вращает обойму 9 с такой же скоростью, как и опорную обойму 8. Хотя вариант с полым ротором дороже предыдущих, но его габариты самые минимальные, т.к. в этом случае не требуется дополнительных элементов для передачи вращения от электродвигателя на вход передаточного блока, таких как блок шестерен в предыдущих вариантах.
Представленный на фиг.4 второй вариант компоновки привода с электродвигателем с полым ротором позволяет увеличить диапазон передаточных отношений, за счет введения второй ступени с качающейся шайбой. При вращении электродвигателя два косых кривошипа на входной обойме 4 вызывают прецессию двух качающихся шайб 18а и 18b, посаженных на кривошипы с помощью подшипников 19а и 19b. Качающиеся шайбы связанны друг с другом механизмом параллельных кривошипов 28, передающим независимое от качающегося движения вращение от одной шайбы к другой. Периодическая дорожка качения 20а на первой качающейся шайбе посредством шариков 10а взаимодействует с периодической дорожкой 6 на опорной обойме 8 с передаточным отношением, определяемым соотношением чисел периодов дорожек 20а и 6. При работе от электродвигателя опорная обойма 8 является неподвижной обоймой, поэтому происходит поворот качающейся шайбы 18а. Соответственно поворачивается и качающаяся шайба 18b, так как она связана с шайбой 18а механизмом параллельных кривошипов 28. Периодическая дорожка 20b на второй качающейся шайбе посредством шариков 10b взаимодействует с периодической дорожкой 7 на выходной обойме 9, еще раз снижая входную скорость вращения. При работе от ручного привода обойма 8 становится вращающейся, и ее вращение передается качающимся шайбам и выходной обойме 9 без снижения скорости. Этот вариант обеспечивает не только максимальное снижение габаритов привода, но и позволяет расширить диапазон снижения скорости при электроприводе на выходной обойме 9, а соответственно и на штоке исполнительного механизма.
В варианте с полым дисковым ротором, показанном на фиг.5, вращение дисков 29а и 29b ротора электродвигателя через кулачковые поверхности 21а и 21b на внутренних торцах колец 4а и 4b, совмещенных с ротором 29 вызовет прецессию качающейся шайбы 18. Далее работа устройства аналогична работе варианта на фиг.2. Подшипники 31 и 32 обеспечивают независимое вращение выходной обоймы 9 относительно дискового корпуса 1, и подшипники 33 и 34 обеспечивают независимое вращение выходной обоймы 9 относительно входных колец 4. Этот вариант также очень компактен, но требует особого выполнения электродвигателя, а следовательно, стоимость его несколько выше по сравнению с вариантами на фиг.1 и 2.
Работа привода с электродвигателем в цилиндрическом исполнении на фиг.6 полностью аналогична работе привода на предыдущей фигуре, т.к. конструктивные отличия этого варианта относятся только к форме выполнения электродвигателя и входного звена передаточного блока.
В заключение, следует отметить, что на рисунках представлены конструкции привода, разработанного для задвижек трубопроводной арматуры, имеющих большой ход штока и требующих для этого сквозного центрального отверстия в приводе. Однако привод может использоваться и в других механизмах, где сквозное отверстие не нужно, например, для вращения вентильных головок шаровых кранов. Это означает, что схемы приводов с соосным расположением электродвигателя и выходной обоймы, показанные на фиг.3 и 4, будут работоспособны не только с двигателем с полым ротором, но и с обычным стандартным электродвигателем.
Все варианты привода обеспечивают безопасную работу оператора как при работающем, так и при неработающем электродвигателе, т.к. самотормозящий червяк не дает возможности вращаться обойме 8 при приводе от электродвигателя. При этом не требуется дополнительных элементов для переключения привода из режима электродвигателя на ручной режим, а также не требуется для этого никаких дополнительных или упреждающих действий оператора. Неожиданное включение электродвигателя при работе оператора приведет лишь к увеличению или уменьшению скорости выходного вала.
Все варианты привода очень компактны, не требуют отдельного жесткого корпуса, определенной прочности требует только несущий корпус, на котором установлены электродвигатель, червячный элемент и который крепится к корпусу запорной арматуры. Изобретение предоставляет широкие возможности в выборе типа электродвигателя для использования с приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2201537C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2198330C2 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2001 |
|
RU2209356C2 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Привод блока вакуумных клапанов | 1978 |
|
SU744143A1 |
Изобретение относится к машиностроению, в частности к электроприводам, управляющим трубопроводной арматурой, например, задвижками или шаровыми кранами, и может быть использовано для дистанционного и местного управления запорной аппаратуры (в том числе высокого давления) на магистральных трубопроводах. Комбинированный привод содержит электродвигатель с передаточным блоком и ручной привод, связанный через червячную передачу со звеном передаточного блока, являющимся неподвижным при работе от электродвигателя, но вращается от червяка ручного привода. Передаточный блок по одному варианту образован тремя соосными обоймами, взаимодействующими друг с другом посредством цепочки шариков и периодических дорожек качения на каждой из обойм. Все обоймы подшипниками связаны друг с другом, так что образуют замкнутую кинематическую цепь. По второму варианту изобретения передаточный блок образован четырьмя обоймами, одна из которых является качающейся шайбой. Изобретение позволяет повысить надежность работы привода. 6 ил.
| МИКРОПРОГРАММНЫЙ АВТОМАТ | 1991 |
|
RU2018937C1 |
| ПРИВОД ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ РЮД | 1996 |
|
RU2108513C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2154219C1 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| US 3539148 A, 10.11.1970. | |||

