Изобретение относится к измерительной технике и может быть использовано в качестве датчика углового положения вала, в частности вала рулевой колонки транспортного средства.
Известен датчик перемещений, описанный в авторском свидетельстве СССР 1227947 (опубл. 30.04.86 г. ). Датчик содержит неподвижное ферромагнитное основание и подвижный относительно него ферромагнитный элемент, выполненный в виде цилиндра, охватывающего основание. На обращенных друг к другу поверхностях основания и подвижного элемента образованы зубцы в виде резьбы. Наружная поверхность подвижного элемента снабжена резьбой с другим шагом и другим направлением нарезки, образующей с неподвижно закрепленной в корпусе гайкой винтовую пару. Подвижный элемент связан с входным валом через сильфон, обеспечивающий выбор осевого люфта в винтовой паре. Входной вал связан с контролируемым валом. При вращении входного вала вращательное движение подвижного элемента, благодаря неподвижно закрепленной гайке, преобразуется в поступательное перемещение этого элемента относительно основания, на котором в продольных канавках уложены петлевые секции обмоток возбуждения и считывания. Вследствие изменения площади зон перекрытия зубцов основания и подвижного элемента обеспечивается пространственная модуляция выходных ЭДС, наводимых в обмотках считывания, образующих двухфазную систему ЭДС. Амплитуда ЭДС является функцией углового положения входного вала.
Однако в известном датчике существенно снижены функциональные возможности, поскольку преобразование углового перемещения контролируемого вала в линейное перемещение подвижного элемента датчика ограничивает возможные угловые перемещения контролируемого вала. Кроме того, большая поверхность трения в винтовой паре, обеспечивающей преобразование углового перемещения в линейное определяет повышенный тормозной момент и износ, обеспечивающие прогрессирующий гистерезис, а следовательно, и снижение достоверности показаний датчика.
Известны датчики углового положения вала, показания которых обнуляются после каждого оборота контролируемого вала. Такие датчики описаны в авторских свидетельствах СССР 1809296 (опубл. 15.04.93 г.) и 1441186 (опубл. 30.11.88 г.).
Датчик по авторскому свидетельству СССР 1809296 содержит цилиндрический статор с закрепленным на нем диэлектрическим каркасом, в котором размещены катушки индуктивности, и ротор, расположенный эксцентрично относительно катушек. На валу ротора, установленного на подшипниках, расположен набор пар полуколец, выполненных из материалов с различной магнитной проницаемостью, разделенных фиксаторными кольцами. Полукольца в смежных парах, размещенные диаметрально противоположно, выполнены из одинакового материала, что обеспечивает согласованное изменение индуктивности соответствующей пары катушек. Пары катушек включены в противоположные плечи мостовой измерительной схемы.
Рассмотренный датчик конструктивно достаточно сложен, его можно устанавливать только в разрыв контролируемого вала или соединять с его торцом.
В отличие от приведенной выше конструкции датчик угловых перемещений по авторскому свидетельству 1441186, взятый за прототип, может быть выполнен проходным, то есть может быть установлен на контролируемый вал без существенных изменений последнего. Датчик содержит стаканообразные статор и ротор, выполненные из высокоэлектропроводного материала и имеющие на своих цилиндрических поверхностях окна, соответствующие секторному углу 180o. Обмотка индуктивности датчика размещена на каркасе, который выполнен с окном, соответствующим секторному углу 180o и смещенным в пространстве на 180o относительно окна на статоре. При угловом перемещении ротора экранирующее влияние перекрывающихся электропроводящих участков статора и ротора на индуктивность обмотки изменяется пропорционально углу поворота ротора, вследствие чего пропорционально этому углу изменяется и величина индуктивности этой обмотки.
Однако описанный датчик не позволяет замерять угол поворота контролируемого вала более чем на один полный оборот без дополнительных устройств, например счетчика числа оборотов, поскольку датчик возвращается в исходное состояние через 360o оборота вала.
Задачей изобретения является расширение функциональных возможностей датчика углового положения вала.
Указанная задача в датчике углового положения вала, содержащем цилиндрический корпус, в котором установлен электроизоляционный каркас с обмотками индуктивности, внутри каркаса размещены неподвижный и подвижный цилиндрические электропроводящие экраны с перфорированными окнами, причем подвижный экран связан с контролируемым валом, решается тем, что подвижный экран связан с контролируемым валом механизмом передачи, выполненным в виде соединенной с валом втулки с эксцентричной внешней поверхностью, на которой с возможностью вращения установлен блок шестерен, имеющий два наружных зубчатых венца разного диаметра, первый венец большего диаметра зацеплен с внутренним третьим губчатым венцом, закрепленным относительно корпуса, а второй венец меньшего диаметра зацеплен с внутренним четвертым зубчатым венцом, закрепленным на подвижном экране.
Окна в неподвижном экране расположены предпочтительно равномерно в один ряд.
Подвижный экран выполнен, как правило, с двумя рядами окон, расположенными со смещением.
Ряд окон неподвижного экрана выполнен преимущественно охватывающим оба ряда окон подвижного экрана вдоль оси контролируемого вала.
Блок шестерен может быть установлен на эксцентричной внешней поверхности втулки посредством подшипника.
Датчик углового положения вала установлен относительно контролируемого вала преимущественно посредством крышки, закрепленной на корпусе и снабженной подшипником с переходной втулкой, в которой закреплен контролируемый вал.
Датчик углового положения вала выполнен предпочтительно проходным.
Обмотки индуктивности могут быть включены в мостовую измерительную цепь переменного тока.
Экраны выполнены преимущественно из меди, медных сплавов, алюминия или алюминиевых сплавов.
Приведенная совокупность признаков в сравнении с известным уровнем техники позволяет сделать вывод о соответствии заявляемого технического решения условию "новизна". В то же время совокупность отличительных признаков, приводящая к решению поставленной задачи, явным образом не следует из уровня техники, поэтому заявляемое техническое решение соответствует условию "изобретательский уровень".
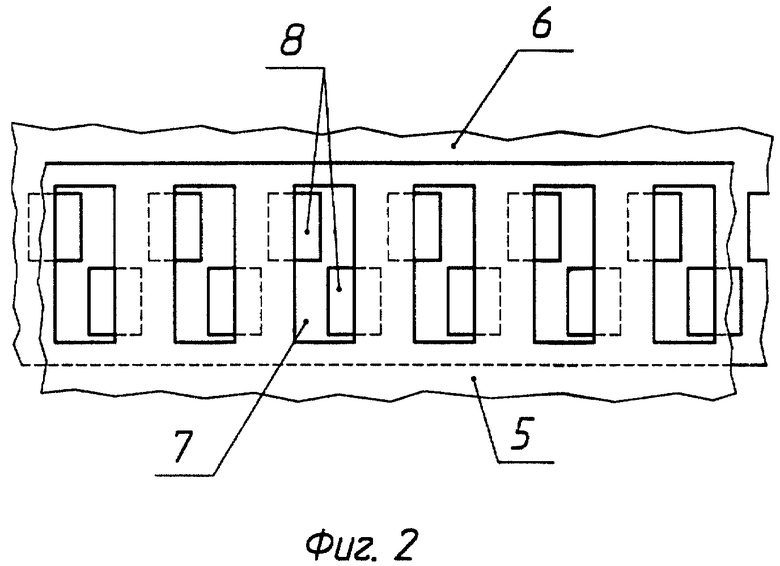
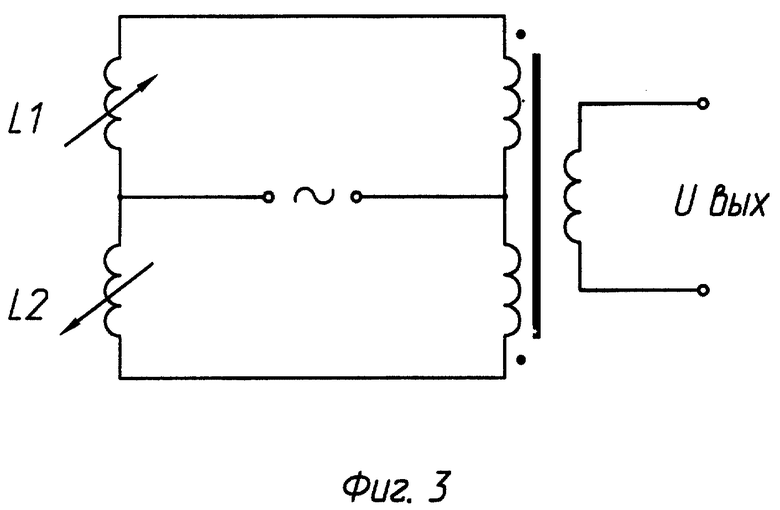
Изобретение поясняется следующими чертежами: на фиг.1 изображен датчик углового положения вала в продольном разрезе; на фиг.2 - развертка экранов; на фиг.3 - вариант включения обмоток индуктивности в мостовую схему переменного тока.
Датчик углового положения вала 1 содержит цилиндрический корпус 2, в котором установлен электроизоляционный каркас 3 с обмотками 4 индуктивности, внутри каркаса 3 размещены неподвижный и подвижный цилиндрические электропроводные экраны 5, 6 с перфорированными окнами 7, 8. Окна 7 в неподвижном экране 5 расположены преимущественно равномерно в один ряд, подвижный экран 6 содержит предпочтительно два ряда окон 8, расположенных со смещением, при этом ряд окон 7 неподвижного экрана 5 выполнен охватывающим оба ряда окон 8 подвижного экрана 6 вдоль оси контролируемого вала 1. Экраны 5, 6 изготавливаются, как правило, из меди, медных сплавов, алюминия или алюминиевых сплавов. Подвижный экран 6 связан с контролируемым валом 1 механизмом передачи, выполненным в виде соединенной с валом 1 втулки 9 с эксцентричной внешней поверхностью 10, блока 11 шестерен, установленного на втулке 9 с возможностью вращения, например, посредством подшипника 12, и имеющего два наружных зубчатых венца 13, 14 разного диаметра. Механизм передачи содержит также два внутренних зубчатых венца 15, 16. Первый венец 13 большего диаметра зацеплен с внутренним третьим зубчатым венцом 15, закрепленным относительно корпуса 2, а второй венец 14 меньшего диаметра зацеплен с внутренним четвертым зубчатым венцом 16, закрепленным на подвижном экране 6. Датчик может быть установлен относительно контролируемого вала 1 посредством крышки 17, закрепленной на корпусе 2 и снабженной подшипником 18 с переходной втулкой 19, в которой закреплен контролируемый вал 1. Эксцентричная втулка 9 и переходная втулка 19 могут быть соединены в одну деталь. Датчик углового положения вала выполняется преимущественно проходным.
Экраны 5, 6 могут быть выполнены также, например, в виде дисков, а обмотки 4 на каркасе 3 могут иметь торцевое расположение относительно экранов 5, 6. В этом случае два ряда окон 8 и обмотки 4 должны располагаться на разных диаметрах относительно оси вала 1.
В исходном положении контролируемого вала 1 (например, вала рулевой колонки транспортного средства) напротив каждого окна 7 неподвижного экрана 5 симметрично устанавливают части окон 8 подвижного экрана 6 (фиг.2). При этом под каждой обмоткой 4 индуктивности расположение окон 7, 8 одинаково, соответственно равны просветы совместного окна. В результате индуктивности L1 и L2 обмоток 4 одинаковы и мостовая измерительная цепь переменного тока, в которую, как правило, включены обмотки 4 (фиг.3), находится в состоянии баланса.
При повороте вала 1 синхронно поворачивается эксцентрично связанная с ним втулка 9, на которой в обратную сторону вращается блок 11 шестерен, первый наружный зубчатый венец 13 которого обкатывается по находящемуся с ним в зацеплении внутреннему зубчатому третьему венцу 15, закрепленному относительно корпуса 2.
Передаточное отношение J1 по углу поворота от вала 1 к блоку 11:
J1=(Z13-Z15)/Z13,
где Z15 - количество зубьев венца 15; Z13 - количество зубьев венца 13.
Вместе с блоком 11 вращается второй наружный зубчатый венец 14, приводящий во вращение подвижный экран 5 путем воздействия на закрепленный на нем внутренний зубчатый четвертый венец 16.
Передаточное отношение J2 по углу поворота от блока 11 к подвижному экрану 5:
J2=(Z14-Z16)/Z14,
где Z16 - количество зубьев венца 16; Z14 - количество зубьев венца 14.
Передаточное отношение J по углу поворота от вала 1 к подвижному экрану 5 равно сумме передаточных отношений обоих звеньев:
J=J1+J2.
Таким образом, вращение контролируемого вала 1 передается экрану 5, в результате чего изменяется перекрытие окон 7, 8 экранов 5, 6, а следовательно, и значения индуктивности L1 и L2 обмоток 4 изменяются в противоположных направлениях, что приводит к разбалансу мостовой измерительной цепи переменного тока и генерации сигнала Uвых, величина которого пропорциональна углу поворота.
В случае вращения вала в противоположном направлении мостовая измерительная цепь разбалансируется и выходной сигнал оказывается сдвинутым по фазе на 180o. Таким образом, с помощью заявляемого устройства определяется угловое положение вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1998 |
|
RU2152600C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1999 |
|
RU2165076C2 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 2003 |
|
RU2244274C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2002 |
|
RU2211439C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА ВАЛА | 1998 |
|
RU2149368C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2191347C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 2001 |
|
RU2199086C2 |
| МНОГООБОРОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2187071C2 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА В СИСТЕМЕ УПРАВЛЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2274573C2 |
Изобретение относится к измерительной технике и может быть использовано в качестве датчика углового положения вала, в частности вала рулевой колонки транспортного средства. Датчик углового положения вала содержит цилиндрический корпус, в котором установлен электроизоляционный каркас с обмотками индуктивности. Внутри каркаса размещены неподвижный и подвижный цилиндрические электропроводные экраны с перфорированными окнами. Подвижный экран связан с контролируемым валом механизмом передачи, выполненным в виде соединенной с валом втулки с эксцентричной внешней поверхностью, блока шестерен, установленного на втулке с возможностью вращения, например, посредством подшипника и имеющего два наружных зубчатых венца разного диаметра. Механизм передачи содержит также два внутренних зубчатых венца. Первый венец большего диаметра зацеплен с внутренним третьим зубчатым венцом, закрепленным относительно корпуса, а второй венец меньшего диаметра зацеплен с внутренним четвертым зубчатым венцом, закрепленным на подвижном экране. Техническим результатом изобретения является расширение функциональных возможностей при относительной простоте конструкции. 9 з.п. ф-лы, 3 ил.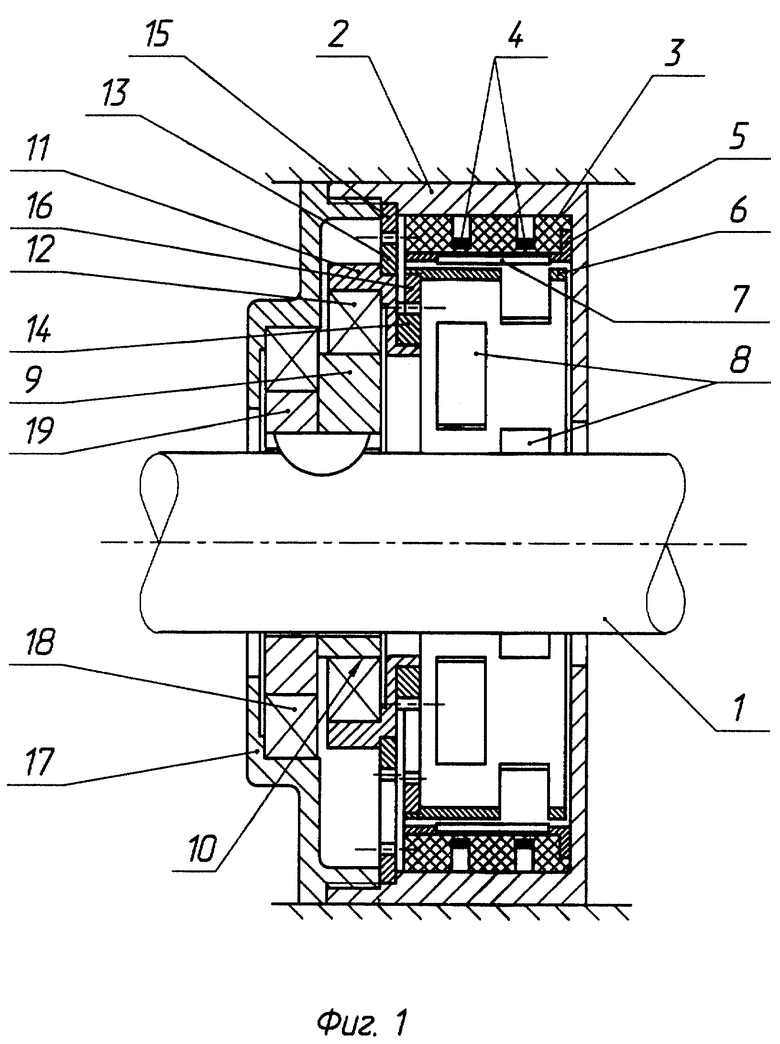
| Датчик угловых перемещений | 1987 |
|
SU1441186A1 |
| Датчик угловых перемещений | 1988 |
|
SU1633265A1 |
| EP 0477653 A2, 01.04.1992 | |||
| DE 3211425 A, 29.09.1983. | |||

